Error Analysis Module II Table of Contents
advertisement

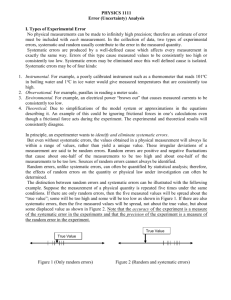
Error Analysis Module II UCCS Physics Labs Table of Contents Random and Systematic error Better results through averaging Propagation of error Percent Error/Difference FYI FYI It is estimated that at any one time, 0.7% of the world's population are drunk. Error Analysis II - 1 2 5 7 11 Random and Systematic Errors Contrary to what you may think, not all error comes from inaccurate equipment. Human beings still manage to impose errors into experimental readings. Whenever you are asked to make a “guess” at the final digit in a measurement you introduce error. The problem is that we do not always repeat the same “guess” for an identical measurement. Sometimes we might guess to high and other times we might guess to low. We do not know what the “correct” value is, so how can we say that we are guessing to high or to low!? The point is, we cannot trust any single measurement to be exactly right. The way to check our measurement is to perform many identical measurements. If all the measurements give the same value, then we should be confident that it is the best value for that measurement. Conversely, if the measurements vary in their value, then we can use some math to determine the best value for that measurement. The first thing I need to tell you is that there are two types of error associated with any measurement. The first is called systematic error. It is an error that introduces a constant offset to every measurement without your knowledge. I guess if we knew about this offset we could fix it! Systematic errors are difficult to detect. The problem is that all of your identical measurements can be exactly the same value. Therefore, you think you have great data but all the data could be shifted by a huge amount. Really the only way to reduce this type of error is to make sure all of your equipment is properly calibrated with respect to some standard known value and zeroed-out under the appropriate conditions. A good example of systematic error is a ruler that is worn out at the end. This will make the ruler shorter than it should be and result in length measurements that are too long! If you suspect that your ruler is giving some offset then you can check it against another ruler, replace it, or do not use the first unit of the ruler. You can begin your measurement at the second unit. Be careful, and remember to subtract off the extra unit you added to the measurement by not starting at the zero mark. Error Analysis II - 2 Starting measurement at 1 cm. Remember to subtract 1 cm form the final reading. The ruler reads: 4.7 cm. True length: 3.7 cm worn edge There are several more examples of systematic error: • Voltmeter (or any meter for that matter) not zeroed, so it will always read too high or too low. • Stopwatch with a bad crystal oscillator causing the time to tick by at a different rate. • Can you think of any more? The best way to detect systematic error is through the use of a graph. For example, two lines are plotted. One represents the experimental data and the other is the theoretical value. See the graph below: data The data has been shifted up by some offset value. theoretical line Error Analysis II - 3 Before you jump to any conclusions and begin labeling all of your data as containing systematic error, make sure all of the data points are shifted by the same amount. data theory theory data No systematic error! Not all the data is shifted by the same amount. Possibility of some systematic error. The lines are not perfectly parallel but are close. Some systematic error might be expected as well as some other source of error, which is causing the lines to diverge. If you remember, I said that there are two types of error. Systematic was the first type of error. The other type of error comes from the unpredictability in taking measurements. Remember the human factor in predicting the last digit of a measurement. This certainly is a source of error that cannot be predicted. This type of error is called random error and is just what its name implies. It is a random fluctuation in your data. Examples of random error: • Starting and stopping a stopwatch • Human hand-eye coordination is not always exact or reproducible • Any measurement where the last digit has to be estimated by eye. • Can you think of other examples? So if we make a graph of a number of identical measurements, ideally they should all perfectly overlap and we should get a very boring graph with a single dot. Error Analysis II - 4 Ideal case: NO random error, all the measurements perfectly overlap Real-world case: Random error, all the measurements are scattered around. The greater the spread in data points the larger the random error. • • • • ••••• • • Getting better results Since we know nothing about how error was introduced into the measurement, it would be unwise to take a single measurement as the absolute correct result. To solve this problem, we should repeat several of the same measurements. This will allow us to see how much the measurement is fluctuating due to random error. For one measurement, we could have seriously overestimated the time (example, slow hand-eye coordination). On the second measurement we might stop timing too early. As we take more and more data we begin to calm down. We get better at using the stopwatch. However, there is still the possibility that we are still under- or overestimating the time. Now that we have repeated the measurements several times which one do we use? From the previous example you might think that the later data points would be better because we were calmer, but how can we be sure? The only real option is to take an average of all the data. If the error in the data is random, then there is no reason to believe that it should have more error in one direction than the other, but should fluctuate equally in both directions. Therefore, taking an average should balance out the fluctuations in both directions and give us a better value for the measurement. To take an average: • Add up all the data values • Divide by the number of data points Error Analysis II - 5 Let’s do an example: Time it takes for a ball to fall 100 feet 2.34 sec, 2.45 sec, 2.27 sec, 2.3 sec, 2.42 sec average = 2.34 + 2.45 + 2.27 + 2.3 + 2.42 sum of data = = 2.36 sec number of data points 5 This value (2.36 sec) is our best guess at the true value. We should use this value in any calculations that may follow. In the world of error analysis, the average value of a set of data is usually referred to as the mean of the data. average = mean = x Scientists, like any other group, like to define and redefine words to make themselves feel important and to make sure no one else can understand them! In the last example we only had to deal with five data points. There are cases when you might have thousands of values. I do not think you would like to write out the numerator of the average calculation with thousands of values. Mathematicians came up with a shorthand symbol (Σ) for the summation of a series of data. i 1 2 3 4 5 xi 2.34 2.45 2.27 2.3 2.42 5 ∑x i = 2.34 + 2.45 + 2.27 + 2.3 + 2.42 = 11.78 i =1 i ⇒ This is the data order number the first data value is 2.34 and has a i value of 1, the second value is 2.45 with i = 2, and so on xi ⇒ This is the value of the ith data point. If i equals 3, then xi=3 = x3 = 2.27. Error Analysis II - 6 Σ ⇒ This is the symbol for a summation of a series of data. The bottom value is the starting point for i. The top value is the stopping value of i. For this example we are going to sum the entire set of data from i =1 to i =5. We can therefore rewrite the averaging equation as: N ∑x x = i =1 N i , where N is the total number of data points Propagation of uncertainty Very few experimental results will be from direct measurements. Most results are attained from a calculation using whatever measurements you are able to gather. Density is an example of one of these results. Density cannot be measured directly, however it is the ratio of two measurable quantities: the mass of an object and the object’s volume. Example: If you were asked to find the density of a block of cheese, you would first need to know its volume and mass. To find its volume, you need to measure the length, width, and height of the block of cheese. All of these measurements will contain some error. Then you need to measure the mass of the cheese, which will also contain error. All of this information will finally go into the equation for density, ρ = mass volume . What is the uncertainty of the density? In performing this mathematical step we appear to have lost all the information about the error in the final result. Therefore, we need a method(s) to keep track of uncertainties as we perform calculations. Propagation of error (Multiplying by a constant) First, let’s examine the simplest form of error propagation through a calculation, the uncertainty in the result of a measurement multiplied by a constant. If y = Ax, where A is a constant and x is our measurement, then the uncertainty of the result (y) is represented by the symbol δy. The uncertainty in the result (δy) is calculated with the use of the following equation: Error Analysis II - 7 δy = A δx Example the circumference of a circle: C = 2πr Where the radius (r) is measured as 23.5 ± 0.2 cm and 2 and π are constants. What is the circumference? C = |2π| (23.5) = 147.65 cm What is the error of the circumference? δC = 2π(0.2) = 1.25 cm Therefore, the final answer is written as: C = 148 ± 1 cm (using proper significant figures) Propagation of error (Addition and Subtraction) The rule in a calculation involving addition and/or subtraction: All the errors add together to give the final error. If z = x + y, where x and y contain an uncertainty (δx and δy). Then the uncertainty in z (δz) is given by: δz = δx + δy Example: Find how much chili and cheese we will have for dinner. Will it be enough? Mass of pot = 72 ± 1 grams Mass of cheese and pot = 540 ± 10 grams Mass of chilly added to pot = 940 ± 20 grams Mass of chili and cheese = (Mass of chili) + (Mass of cheese and pot) - (Mass of pot) Mass of chili and cheese = 940 g + 540 g - 72 g = 1408 g Value of error = 1 g + 10 g + 20 g = 31 g Final result = 1408 ± 31 g Error Analysis II - 8 You have plenty of food; you should invite me over for dinner! Propagation of error (Multiplication and division) Both multiplication and division are treated the same and follow this rule: If z = xy or z = xy then the uncertainty in z is given by: δz z = δx x + δy y Solving for the error in z: ⎛ δx δy ⎞⎟ δz = z ⎜ + y⎠ ⎝x What if you combine multiplication and division in the same calculation? No problem! A= BC D then δA is: ⎡ δB δC δD ⎤ and so on, if more variables were present. δA = A ⎢ + + C D ⎦⎥ ⎣B Lets try some examples of what I’m talking about: Length Density of cheese Length = 10 ± 2 cm Width Height = 5 ± 1 cm Mass = 700 ± 1 g Height Width = 20 ± 5 cm The value for the density is: ρ = mass 700 M = = = 0.7 g 3 cm volume 10 × 20 × 5 L ×W× H Error Analysis II - 9 The value of the error ⎡ δM δρ = ρ ⎢ δL δW δH ⎤ ⎥ H⎦ 5 1⎤ 2 ⎡ 1 = 0.7 ⎢ + + + = 0.455 ⎣ 700 10 20 5 ⎥⎦ ⎣M + L + W + g cm 3 Therefore, the final result for the density of the cheese: 0.7 ± 0.5 g 3 cm You may notice in our example the error was almost as large as the result. This can happen. To reduce the error we need to improve the accuracy of our measurements! This was a brief introduction to the propagation of error. If you do not understand where these equations came from, don’t worry about it. In the upper division labs a more in-depth explanation will be given concerning error and its propagation through equations. You will be required to use these equations and methods of error analysis for the first few labs. Even though the method just described is the correct method of error analysis it will become very time consuming and counter productive in subsequent labs. Other alternatives will be presented as needed throughout the semester. You have only seen the tip of the iceberg and hopefully this will help when the time comes to explore the topic fully. It may seem like a huge waste to spend so much time and energy on determining the uncertainty. In fact experimental scientists spend as much time if not more on calculating their uncertainty as they do on actually getting the measurement. This is because the uncertainty is representation of the quality of the measurement. It tells the researcher if it is necessary to further improve the experimental procedure and gives him/her clues on where the problems are arising. Error Analysis II - 10 Percent Error/ Percent Difference There will be instances when proper methods of determining your uncertainty (propagation of error, standard deviation, etc.) is too time consuming (I will let you when that is case). We will still need a method of determining how much our experimental value differs from an accepted value. In the case of comparing our results to a standard, known value (like g = 9.81 m/s2) we will use the percent error. Multiplying by 100 at the end converts the error into a percentage. percent error (%) = x exp - x th x th × 100 where, xexp is the experimental result and xth is the theoretical value. Therefore, using the example of g: Through a brilliantly designed and carefully executed experiment you arrived at a value of 9.95 m/s2 for your value of g. Therefore: xexp = 9.95 and xth = 9.81 9.95 - 9.81 × 100 = 1.4 % error 9.81 percent error (%) = What happens when we do not have a fundamental constant for comparison? What if we want to compare two values both arrived at the same results by different means. Example, Moment of inertial of a disk measured in two different ways. x1 – moment of inertial measured using the linear acceleration of a falling mass. x2 – moment of inertial calculated using the geometric dimensions of the disk. Both methods yielded a value for the moment of inertia, but there is no reason to suspect that either one is more accurate than the other. This is a perfect for a percent difference calculation. percent difference (%) = x1 - x 2 1 (x 1 + 2 x2 ) × 100 lets say that our two measurements were: x1 = 0.006719 kg⋅m2 x2 = 0.006788 kg⋅m2 percent difference (%) = 0.006719 - 0.006788 1 (0.006719 + 2 0.006788 ) Error Analysis II - 11 × 100 = 1%