To the Graduate Council:
I am submitting herewith a thesis written by Samuel Stewart Watson entitled “Powers of Algebraic Disjointness Preserving Operators.” I have examined the final copy of this thesis for form
and content and recommend that it be accepted in partial fulfillment of the requirements for
the degree of Master of Science, with a major in Mathematics.
Gerard Buskes, Major Professor
Professor
We have read this thesis
and recommend its acceptance:
Qingying Bu, Associate Professor
James Reid, Professor
Vlad Timofte, Visiting Associate Professor
Accepted for the Council:
Dean of the Graduate School
STATEMENT OF PERMISSION TO USE
In presenting this thesis in partial fulfillment of the requirements for a Master’s degree at The
University of Mississippi, I agree that the Library shall make it available to borrowers under
rules of the Library. Brief quotations from this thesis are allowable without special permission,
provided that accurate acknowledgment of the source is made.
Permission for extensive quotation from or reproduction of this thesis may be granted by my
major professor or in his absence, by the Head of Interlibrary Services when, in the opinion of
either, the proposed use of the material is for scholarly purposes. Any copying or use of the
material in this thesis for financial gain shall not be allowed without my written permission.
Signature
Date
POWERS OF ALGEBRAIC DISJOINTNESS PRESERVING OPERATORS
A thesis submitted for the Master of Science Degree
University of Mississippi
Samuel Stewart Watson
May 2009
ACKNOWLEDGEMENTS
I would like to thank my advisor Dr. Buskes for the countless hours he put into this project
and my wife Nora for her continual support. I would also like to thank Tristan Denley for his
mentorship as well as Vlad Timofte for his helpful comments.
ii
ABSTRACT
Let T be an algebraic order bounded disjointness preserving operator on an Archimedean Riesz
space. It is known that T n! when restricted to the range of T m is an orthomorphism, where n
and m are respectively the degree and multiplicity of zero as a root of the minimal polynomial
of T [4]. Using a graph associated with T , we improve the exponent n!.
iii
Contents
1
Introduction
2
Topological Prerequisites
2.1 Definitions . . . . . . .
2.2 Nets and Convergence
2.3 Compactness . . . . . .
2.4 The Weak Topology . .
3
1
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
3
3
3
4
5
Riesz Spaces
3.1 Vector Spaces and Subspaces . . . . . . . . . . .
3.2 Definitions and Basic Identities for Riesz Spaces
3.3 Lattice Homomorphisms . . . . . . . . . . . . . .
3.4 Vector sublattices . . . . . . . . . . . . . . . . . .
3.5 Banach Lattices . . . . . . . . . . . . . . . . . . .
3.6 Algebraic Operators . . . . . . . . . . . . . . . . .
3.7 Disjointness Preserving Operators . . . . . . . .
3.8 Order Ideals and Bands . . . . . . . . . . . . . . .
3.9 The Riesz Space of Order Bounded Operators . .
3.10 Orthomorphisms . . . . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
6
6
7
9
10
11
12
14
14
16
18
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
4
Riesz Spaces of Continuous Functions
19
4.1 Zero-sets and Completely Regular Topological Spaces . . . . . . . . . . . . . . . . . 19
4.2 The Stone-Čech Compactification . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
4.3 The Realcompactification . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
5
Disjointness Preserving Operators on C(X)
22
5.1 Supports of Riesz Seminorms . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
5.2 The Graph Representation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
5.3 Powers of Algebraic Disjointness Preserving Operators on C(X) . . . . . . . . . . . 26
6
The General Case
28
7
Some Consequences
29
References
32
iv
1
1 INTRODUCTION
1 INTRODUCTION
Suppose we have directed graph on n vertices with the property
that each vertex has at most one outgoing edge (Figure 1). Place
a token on each of the vertices and repeatedly slide every token
on the graph from its current vertex along that vertex’s outgoing
edge to a new vertex (removing the token if there is no outgoing
edge). Each token will eventually either
3
9
5
(i) be removed from the graph,
(ii) return to the vertex where it started (and continue to cycle), or
(iii) return first to a vertex different from the one where it
6
started, and continue to cycle.
Let M be any integer divisible by each of the graph’s cycle
lengths. After M steps, all of the type (ii) vertices will be at the
vertex where they started. We can give this observation an alternate description that allows generalization.
2
1
10
4
7
8
From the graph described above, form an n × n matrix T with Figure 1: A directed graph.
1 in the (i , j )th position if there is a directed edge from i to j
and 0 otherwise. The condition that each vertex has at most one
outgoing edge corresponds to a matrix that has at most one 1 on each row. The graph gives a
complete description of T as an operator from Rn to Rn as follows. Denote by τ(k) the vertex to
which k is connected. The kth entry of T v is τ(k)th entry of v. For example, in Figure 1, when
we slide the token originally on vertex 6 to vertex 4, this tells us that (T v)6 is v 4 . Similarly, for
any power T r , we can use the graph to calculate (T r v)k by simply sliding the tokens r times and
reading v τr (k) .
To describe the action of matrices with real number entries (still at most one nonzero entry per
row) using a graph, we just associate with each edge from i to j in the graph a weight: the real
number Ti j (the (i , j )th entry of T ). The kth entry of T r v is the τr (k)th entry of v times the
0
0
0
1
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
1
0
0
1
0
1
0
0
0
0
0
1
1
0
1
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
−6
5
4
−2
−4
2
3
9
−8
−4
=
−8
0
0
−6
4
−2
−2
4
−2
4
Figure 2: The matrix T corresponding to the directed graph on
{1, 2, . . . , 10} and its operation on an element of R10 .
2
1 INTRODUCTION
product of the weights the r edges in the path from k to τr (k).
Let us translate the observation that “after M steps the only tokens that can be at a vertex other
than where they started will be those of type (iii).” Observe that if k is in a cycle, then the vector
e k with a 1 in the kth position and zeros elsewhere will actually be a multiple of T M e k . Then T M
is diagonal operator on the subspace generated by these e k ’s (i.e., the subspace of Rn consisting
of the vectors which are zero except in positions corresponding to an element of the cycle). For
how large a subspace of Rn is T M a diagonal operator? This question is answered in Theorem
6.3; it makes use of the minimal polynomial of T , i.e. the monic polynomial p of minimum
degree that annihilates T :
p(T ) = T n + a n−1 T n−1 + · · · + a m T m = 0,
with a m nonzero. We will see that T M is a diagonal operator on the range of T m and that we
can improve our exponent M to the least common multiple of the cycle lengths of T . Before we
prove this claim, we look to generalize it to infinite-dimensional vector spaces.
We would like to abstract the condition that no row contain more than one nonzero entry. To
accomplish this, we consider the order structure of Rn . We say that v ≤ w in Rn if inequality
holds for each coordinate: v k ≤ w k for k = 1, 2, . . . , n. This turns Rn into a partially ordered set,
and moreover the partial order respects addition and scalar multiplication: v ≤ w ⇒ v + z ≤
w + z and 0 ≤ v and λ ≥ 0 ⇒ λv ≥ 0. In addition, Rn with coordinate-wise order is a lattice, i.e.
every pair of elements u and v has a least upper bound (denoted u ∨ v) and a greatest lower
bound (denoted u ∧v), which we can get just by taking the max and the min at each coordinate.
A partially ordered vector space L whose order structure is a lattice is called a vector lattice, or
Riesz space.
Any pair of basis vectors {e k }nk=1 of Rn give an example of disjoint vectors, i.e. each vector is
nonzero only in positions where the other is zero. In terms of order, v and w are said to be disjoint if |v| ∧ |w| = 0 (where |v| B v ∨ (−v)). Also, because we are working in infinite dimensions,
we impose some regularity conditions on T . Operators that are well-behaved with respect to
the order structure are called order bounded operators (see Preliminaries section), and we also
need to consider operators which are algebraic so we can make use of the minimal polynomial.
In [4], the following statement is proved: If T is an algebraic, order bounded, disjointness preserving operator on a Archimedean Riesz space, then T n! restricted to the vector sublattice generated by the range of T m is a diagonal operator, where n and m are the degree and the multiplicity of zero as a root of the minimal polynomial of T . In this paper we show that the graph
approach discussed above can be used to improve the exponent n! in [4] to the least common
multiple of the cycle lengths of T ’s graph. We will develop all the material necessary for the
proof of this result, citing only Tychonoff’s theorem [10], Kakutani’s Representation theorem
[11], and the existence of the modulus of an order bounded disjointness preserving operator
[11] without proof. Our primary references for the material on Riesz spaces are [1] and [11], and
for basic topological facts we use [10] and [6]. As usual, we denote the set of real numbers by
R and set of natural numbers by N. In accordance with [9], we use the notation f ← rather than
f −1 for the preimage under f and for the inverse function of f . We use brackets rather than
parentheses when taking images or a preimages. For example, the preimage of A under f is
denoted f ← [A].
2 TOPOLOGICAL PREREQUISITES
3
2 TOPOLOGICAL PREREQUISITES
2.1 Definitions
Let X bet a set and let τ be a set whose elements are subsets of X . If
(i) ; ∈ τ and X ∈ τ,
(ii) the union of the elements of any subset of τ is in τ, and
(iii) the intersection of the elements any finite subset of τ is in τ,
then τ is called a topology on X , and the set X equipped with the topology τ is called a topological space. The elements of τ are called open sets, and the complements of elements of τ are
called closed sets. The closure of any subset E of X is defined to be the intersection of all closed
sets containing E . If x ∈ X and U is an open set containing x, then U is called a neighborhood
of x. Any collection ω of subsets of X generates a topology on X in the following way: form the
set ω∩ of all finite intersections of elements of ω, and form arbitrary unions of the elements of
ω∩ [6]. The set ω is called a subbase for the resulting topology, and if ω = ω∩ , then ω is called
a base for the topology. Alternatively, we may begin with an arbitrary collection ω of sets, form
the collection ω∪ of finite unions of elements of ω, and form the set of arbitrary intersections of
elements of ω∪ . The resulting sets are the closed sets for a topology, and ω is called a subbase for
the closed sets of that topology. A topological space X is called Hausdorff if for every x , y ∈ X ,
there exists disjoint open sets U and V with x ∈ U and y ∈ V . A topology τ1 is said to be weaker
than another topology τ2 if τ1 ⊂ τ2 .
Let X and Y be topological spaces. A map f : X → Y continuous if for every open U ⊂ Y , f ← [U ]
is open in X . Observe that a function is continuous if and only if f ← [F ] is closed in X for every
closed F ⊂ Y . Indeed, f ← [U ] = X \ f ← [U ] and f ← [F ] = X \ f ← [F ] for open U and closed F . If
X is a Hausdorff space and if for every closed F ⊂ X and x ∉ F there is a continuous function
f : X → R for which f (x) = 1 and f [F ] = {0}, then X is said to be completely regular.
If a continuous bijection f : X → Y has a continuous inverse as well, then any topological property of either space is held by the other. Such a map is called a homeomorphism, and two spaces
X and Y are said to be homeomorphic if there exists a homeomorphism from X to Y . Also, a
subset A ⊂ Y is dense in Y if the closure of A is Y . If a map e : X → Y is a homeomorphism
between X and its range e[X ], then e is called an embedding of X into Y . If e[X ] is dense in Y ,
then e is a called dense embedding of X into Y .
2.2 Nets and Convergence
A directed set Σ is a nonempty set along with a relation ≺ (called a direction) satisfying the following conditions:
(i) If σ1 ≺ σ2 and σ2 ≺ σ3 , then σ1 ≺ σ3 .
(ii) For every σ1 and σ2 in Σ, there is an σ3 ∈ Σ for which σ1 ≺ σ3 and σ2 ≺ σ3 .
A function x from a directed set Σ into a set A is called a net. We will write the argument of a net
using a subscript, and we will sometimes use the more explicit notation (x σ )σ∈Σ to refer to a net.
A set of the form {x σ σ0 ≺ σ} for some σ0 ∈ Σ is called a tail of the net (x σ )σ∈Σ . If A is a subset of
a topological space X , then we say that a net converges to a point a ∈ X (written x σ → a) if for
2 TOPOLOGICAL PREREQUISITES
4
every neighborhood of a there is an σ0 so that x σ ∈ U for all σ0 ≺ σ. The point a is said to be a
limit of the net. A net with directed set (N, ≤) is called a sequence.
Nets are useful for studying both the topological properties of a space X and the continuous
functions on X . This is illustrated by the following two theorems [6].
Theorem 2.1. The closure of a set A in a topological space X consists of all the points of X
which are the limits of a net in A.
First we show that if x is in every closed set containing A, then x is the limit of a net in A. If U
is an open set containing x, then X \U is a closed set not containing x, so X \U cannot contain
A. It follows that A intersects every open set containing x. Define a direction on the collection
of all open sets containing x by U ≺ V if V ⊂ U (in other words, the smaller neighborhoods of x
are farther along). Define a net on this directed set to map each open U containing x to some
xU ∈ U ∩ A. It is easy to verify that this is a net in A converging to x.
Conversely, suppose that x is the limit of a net in A, and let F be a closed set containing A. If
x ∉ F , then X /F is a neighborhood of x containing no elements of A. Therefore, x is not a limit
of a net in A.
Theorem 2.2. Let X and Y be topological spaces. Then a function f : X → Y is continuous if
and only if f (x σ ) → f (x) whenever x σ → x in X .
Proof. Suppose that f is continuous, and let x σ → x. For any neighborhood V of f (x), the
preimage f ← [V ] is an open neighborhood of x. Therefore, we can find σ0 so that x σ ∈ f ← [V ]
for σ0 ≺ σ. In other words, f (x σ ) ∈ V for σ0 ≺ σ. Taking Conversely, suppose that f (x σ ) → f (x)
for every convergent net x σ → x in X . It suffices to show that f ← [F ] is closed for all closed
F ⊂ Y . So let F ⊂ Y be a closed set, and let x be in the closure of f ← [F ]. Taking x σ → x, we get
by hypothesis f (x σ ) → f (x). Since each f (x σ ) is in F and F is closed, f (x) ∈ F also. But then
x ∈ f ← [F ], so f ← [F ] is closed. By the previous remark, it follows that f is continuous.
Proposition 2.3. If f , g are continuous functions from X to R and if f (x) ≤ g (x) for all x in
A ⊂ X , then f (x) ≤ g (x) for all x in the closure of A.
Proof. Let x be in the closure of A, and suppose that f (x) > g (x). Set ² = ( f (x) − g (x))/2 > 0
and take a net x σ in A converging to x. By the continuity of f and g , we have f (x σ ) → f (x) and
g (x σ ) → g (x). Therefore, we can find an σ0 so that for all σ > σ0 we have both f (x σ ) > f (x) − ²
and g (x σ ) < g (x) + ². Multiplying the second of these inequalities by −1 and adding, we get
f (x σ ) > g (x σ ), a contradiction since x σ ∈ A.
2.3 Compactness
Let X be a topological space and let Y ⊂ X . A collection V of open sets whose union contains
Y is called an open cover of Y . If U ⊂ V and U is also an open cover of Y , then U is called a
subcover. If every open cover of Y has a subcover with finitely many elements, then Y is said
to be compact. For example, the collection {(1/n, 1) : n = 2, 3, 4, . . .} of open sets in R covers the
interval (0, 1), yet any finite subset of this cover will fail to cover (0, 1). This demonstrates that
5
2 TOPOLOGICAL PREREQUISITES
(0, 1) is not compact in R. Actually, in Rn a set is compact if and only if it is both closed and
bounded [10].
A subset Y of a topological space X inherits a natural topology from X called the relative topology, which consists of the intersections with Y of all the open sets of X . The following theorem
shows that compactness is a property of Y only; it does not depend on the space X which happens to contain Y .
Theorem 2.4. Let Y ⊂ X be a compact subset of the topological space X . Then Y is a compact
subset of any Y ⊂ Z ⊂ X .
Proof. Let V be an open cover of Y in Z . By the definition of the relative topology, each V ∈ V
gives rise to an open V 0 ⊂ X for which V = V 0 ∩ Z . Also, it is clear that the collection {V 0 : V ∈ V}
is an open cover of Y in X , so we can find a finite subcover {Vi0 }ni=1 of Y . Finally, {Z ∩ Vi0 }ni=1 is a
finite subcover of the open cover V, so Y is a compact subset of Z .
Theorem 2.5. The image of a compact set under a continuous function is compact.
Proof. Let V be an open cover of f [K ]. Then { f ← [V ] : V ∈ V} is an open cover of K , so it admits
a finite subcover { f ← [Ui ]}ni=1 . Then {Ui }ni=1 is a finite subcover of f [K ], as desired.
Theorem 2.6. A closed subset of a compact space is compact.
Proof. Let K be compact and let F ⊂ K be closed. Then for any open cover V of F , the set
{K \F } ∪ V is an open cover of K and hence admits a finite subcover. After omitting K \F , we
obtain a finite subcover of F .
2.4 The Weak Topology
Let X and Y be topological spaces. The weak topology generated by a family F of functions
from X to Y is defined to be the one generated by the subbase { f ← [V ] : f ∈ F,V ⊂ Y is open}.
The family F is said to determine the topology of a space if the space’s topology coincides with
the weak topology generated by F. The weak topology generated by F is the weakest topology
that makes all the functions in F continuous.
Theorem 2.7. If B is a subbase for the topology on Y , then the topology generated by
{ f ← [V ] : f ∈ F,V ∈ B}
(2.1)
coincides with the weak topology generated by F on X .
Proof. Clearly the topology generated by { f ← [V ] : f ∈ F,V ∈ B} makes all the functions in F
continuous. Conversely, any topology which makes all the functions in F continuous contains
all the sets in { f ← [V ] : f ∈ F,V ∈ B}.
Observe that the previous theorem and its proof work for subbases for the closed sets as well as
subbases for the open sets.
6
3 RIESZ SPACES
The Cartesian product α X α of a collection of sets {X α }α∈A is defined to be the set of all func
S
tions from A to α X α for which f (α) ∈ X α for all α ∈ A. Define the projection πα : α X α → X α
to map each f ∈ α X α to f (α). The product topology on a Cartesian product of topological
spaces is the one generated by the collection
{π←
α [U ] : α ∈ A, U ⊂ X α open}.
The product topology is the weakest topology for which every projection is continuous.
Theorem 2.8. If the topology of a topological space Y is determined by a family of functions
from Y to R, then a function σ from X to Y is continuous if and only if g ◦σ : X → R is continuous
for every g in the family.
Proof. We need to show that σ← [U ] is open for every open U ⊂ Y . However, the open subsets
of Y are the unions of finite intersections of set of the form g ← [V ], where V ⊂ R is open. Any
such set has preimage σ← [g ← [V ]] = (g ◦ σ)← [V ], which is open by hypothesis. Since the preimage operation distributes across unions and intersections, this is sufficient to show that every
σ← [U ] is open.
Theorem 2.9. (Tychonoff) If X α is a compact topological space for every α is some index set A,
then the product α X α is compact.
We refer the reader to [10] for a proof of Tychonoff’s theorem.
3 RIESZ SPACES
3.1 Vector Spaces and Subspaces
Definition 3.1. A real vector space is a set V along with two operations + : V × V → V and
· : R × V → V for which
(i) (u + v) + w = u + (v + w) for all u, v, w ∈ V ,
(ii) u + v = v + u for all u, v ∈ V ,
(iii) there exists a vector 0 ∈ V for which u + 0 = u for all u ∈ V ,
(iv) for each u ∈ V , there is a vector −u ∈ V for which u + (−u) = 0,
(v) α · (u + v) = α · u + α · v for all α ∈ R and u, v ∈ V ,
(vi) (α + β) · (u) = α · u + β · u for all α, β ∈ R and u ∈ V ,
(vii) α · (βu) = (αβ) · u for all α, β ∈ R and u ∈ V , and
(viii) 1 · v = v for all v ∈ V .
The operation · is called scalar multiplication, and + is called vector addition. From here on
we will denote scalar multiplication by juxtaposition, (αv instead of α · v), and we will write 0
instead of 0 for the zero vector.
Definition 3.2. Let V and W be vector spaces. A map T : V → W is called a linear operator if
(i) T (v + w) = T (v) + T (w) for all v, w ∈ V , and
(ii) T (αv) = αT (v) for all α ∈ R and v ∈ V .
3 RIESZ SPACES
7
We will use the term operator interchangeably with linear operator. Let V be a vector space. A
sum of scalar multiples of finitely many elements v 1 , v 2 , . . . , v n of V is called a linear combination of v 1 , v 2 , . . . , v n . If U ⊂ V is a vector space then U is called a vector subspace of V . To check
whether U ⊂ V is a vector subspace, it suffices to verify that scalar multiplication and vector addition are well-defined, since all the vector space axioms are inherited from V . In other words, a
subset U of V is a subspace of V if and only if U contains every linear combination of elements
of U . We define the sum of a finite collection of vector subspaces U1 ,U2 , · · · ,Un of V as
U1 +U2 + · · · +Un = {u 1 + u 2 + · · · + u n : u i ∈ Ui for all i = 1, 2, . . . , n}.
It is easy to verify that a sum is a vector subspace. If every element in a sum may be represented
uniquely in the form u 1 + u 2 + · · · + u n where u i ∈ Ui for all i = 1, 2, . . . , n, then we call the sum a
direct sum and use the notation U1 ⊕U2 ⊕ · · · ⊕Un to denote the direct sum. The notation serves
as a reminder of the uniqueness of the representation of each element as a sum of vectors in
U1 ,U2 , . . . ,Un . If T : V → V is an operator, we say that a subspace U of V is invariant with
respect to T or T -invariant if u ∈ U ⇒ Tu ∈ U . It is necessary that U be T -invariant if we wish to
restrict the operator T : V → V to an operator T |U : U → U .
3.2 Definitions and Basic Identities for Riesz Spaces
Definition 3.3. An ordered vector space is a real vector space L equipped with a relation ≤ for
which
(i) u ≤ u for all u ∈ L,
(ii) u ≤ v and v ≤ u ⇒ v = u for all u, v ∈ L,
(iii) u ≤ v and v ≤ w ⇒ v ≤ w for all u, v, w ∈ L,
(iv) u ≤ v ⇒ w + u ≤ w + v for all u, v, w ∈ L, and
(v) 0 ≤ u ⇒ 0 ≤ λu for all u ∈ L and 0 ≤ λ.
Notice that (iv) implies that u ≤ v if and only if −v ≤ −u. A relation satisfying the first three
conditions is a partial order, and the latter two conditions ensure that the partial order behaves
well with respect to the vector operations. The notation u ≥ v is used interchangeably with
v ≤ u, and in either case we say that u dominates v. For any u and v in an ordered vector space,
if there is a lower bound w for u and v (i.e. w ≤ u and w ≤ v) that dominates every lower bound
for u and v, then w is called the infimum of u and v and is denoted u ∧ v. Similarly, a least
upper bound for u and v is called the supremum of u and v and is denoted u ∨ v. A Riesz space
is an ordered vector space in which every pair of vectors has an infimum and a supremum.
We introduce the abbreviations u + = u ∨0, u − = (−u)∨0, and |u| = u ∨(−u). We will prove some
useful lattice identities and a special case of the Riesz decomposition theorem [1].
Proposition 3.4. For u, v in a Riesz space L, we have the following identities:
(i) u − = (−u)+ and u + = (−u)−
(ii) u ∨ v = − [(−u) ∧ (−v)]
(iii) u ∧ v = − [(−u) ∨ (−v)]
(iv) w + u ∨ v = (w + u) ∨ (w + v)
8
3 RIESZ SPACES
(v) w + u ∧ v = (w + u) ∧ (w + v)
³
´
(vi) u ∨ v = 21 u + v + |u − v|
³
´
(vii) u ∧ v = 21 u + v − |u + v|
(viii) u + v = u ∧ v + u ∨ v
(ix) |u| = u + + u −
(x) |u + v| ≤ |u| + |v|
Proof. (i) follows immediately from the definitions.
(ii) Let w = − [(−u) ∧ (−v)]. Then −w ≤ −u and −w ≤ −v, so w ≥ u and w ≥ v, which implies
that w is an upper bound for u and v. This reasoning is reversible: if z is an upper bound for
u and v, then −z ≤ −v and −z ≤ −u, so −z ≤ (−u) ∨ (−v), from which z ≥ − [(−u) ∨ (−v)] = w.
Hence w is the greatest lower bound of u and v. The proof of (iii) is similar.
(iv) Let y = w +u ∨v. Then y −w ≥ u and y −w ≥ v, so y −w ≤ u ∧v, which implies y ≥ w +u ∨v.
Conversely, if z ≥ w + u and z ≥ w + v, then z − w ≥ u and z − w ≥ v, so z − w ≥ u ∨ v. This
implies z ≥ w + u ∨ v = y, so that y is the least upper bound of w + u and w + v. The proof of (v)
is similar.
(vi) Use identity (iv): u +v +(u −v)∨(v −u) = (u +v +u −v)∨(u +v +v −u) = (2u)∨(2v) = 2(u ∨v).
The last step follows from (v) of Definition 3.3.
(vii) Use (ii) and (v): u + v − (u − v) ∨ (v − u) = u + v + (v − u) ∧ (u − v) = (u + v − (u − v)) ∧ (u + v −
(v − u)) = (2v) ∧ (2u) = 2(u ∧ v).
For (viii), add the previous two identities, and for (ix) substitute v = 0 into (viii). For (x), use (i),
(viii), and (ix) [11]
|x + y| = (x + y) ∨ (−x − y) ≤ (x + + y + ) ∨ (x − + y − ) ≤ x + + y + + x − + y − = |x| + |y|.
Theorem 3.5. (Riesz decomposition) For positive vectors u, v 1 and v 2 in a Riesz space L with
u ≤ v 1 + v 2 , there exist u 1 and u 2 for which u = u 1 + u 2 and 0 ≤ u 1 ≤ v 1 and 0 ≤ u 2 ≤ v 2 .
Proof. Set u 1 = [u ∨ (−v 1 )] ∧ v 1 . Then by definition u 1 ≤ v 1 , and 0 ≤ u 1 since both u ∨ (−v 1 ) and
v 1 are positive. For u 2 = u − u 1 , we calculate
u 2 = u − [u ∨ (−v 1 )] ∧ v 1 = (u − [u ∨ (−v 1 )]) ∧ (u − v 1 )
= [(u − u) ∨ (u + v 1 )] ∧ (u − v 1 )
= (u + v 1 )+ ∧ (u − v 1 ),
from which we can see that u 2 ≤ u − v 1 ≤ v 2 and u 2 is positive since both (u + v 1 )+ and (u − v 1 )
are positive.
Example 3.6. The following are Riesz spaces.
(i) The set C (X ) of all continuous real-valued functions on a topological space X , under the
pointwise order f ≤ g if f (x) ≤ g (x) for all x ∈ X .
9
3 RIESZ SPACES
(ii) The set of all piecewise linear functions on [0, 1), i.e. all the functions f : [0, 1) → R for
which there exists a partition 0 = x 0 < x 1 < · · · < x n = 1 for which f is linear on each
[x j −1 , x j ) ( j = 1, 2, . . . , n).
(iii) The lexicographic plane, which is R2 under the order (x 1 , y 1 ) ≤ (x 2 , y 2 ) if either x 1 < x 2 or
x 1 = x 2 and y 1 ≤ y 2 .
Proof. (i) Since | f | is continuous whenever f is continuous, (vi) and (vii) of Proposition 3.4 show
that the pointwise supremum and infimum of every pair of continuous functions is continuous.
Also, the properties (iv) and (v) of Definition 3.3 are inherited from the real numbers.
(ii) Given two piecewise linear functions f and g with partitions 0 = x 0 < x 1 < · · · < x m = 1 and
p
0 = y 0 < y 1 < · · · < y n = 1 (respectively), let {z k }k=1 be the set of isolated intersection points of
the graphs of f and g and consider the partition P with points
p
n
{x i }m
i =1 ∪ {y j } j =1 ∪ {z k }k=1 .
The pointwise supremum and infimum of f and g is linear on each of the intervals associated
with P . Again, the properties(iv) and (v) of Definition 3.3 are inherited from the real numbers.
(iii) The transitivity of ≤ follows from checking cases: let u ≤ v and v ≤ w. If any of the xcoordinates of u, v, and w are different, then u ≤ w because w has a larger x-coordinate than
u. Otherwise, u ≤ w because the y-coordinate of w is greater than or equal to the y-coordinate
of u. Similarly, it is easy to check that u ≤ v ⇒ w + u ≤ w + v and 0 ≤ u ⇒ 0 ≤ λu for every
u, v, w ∈ R2 and λ ∈ R by considering separately in each case whether the x-coordinates are
equal.
We sometimes write constant functions in C (X ) using boldface. For example, r means the constant function f (x) B r for all x ∈ X . Occasionally we will also drop the boldface when there can
be no confusion. For example, g + ² means the function g plus the constant function f (x) B ²
for all x ∈ X .
The positive cone (or nonnegative cone) of L is defined by L + = { f : f ≥ 0}. (Notice that with this
definition, R+ = {x : x ≥ 0}, not {x : x > 0}.) A Riesz space L is Archimedean if for all u, v ∈ L + , we
have
nu ≤ v for all n ∈ N ⇒ u = 0.
Examples 3.6(i) and 3.6(ii) are Archimedean. To see that 3.6(iii) is not Archimedean, take u =
(0, 1) and v = (1, 1). A Riesz space L is Dedekind complete if every bounded subset of L has
a supremum in L (In an arbitrary Riesz space, this supremum is only guaranteed to exist for
finite subsets). Any Dedekind complete Riesz space is Archimedean [1]. To see this, take the
supremum w of {nu : n ∈ N}, and observe that nu = (n + 1)u − u ≤ w − u ⇒ w ≤ w − u ⇒ u = 0.
3.3 Lattice Homomorphisms
Let L and M be Riesz spaces.
Definition 3.7. An operator π : L → M is called a lattice homomorphism if for all u, v ∈ L,
u ∧ v = 0 ⇒ π(u) ∧ π(v) = 0.
3 RIESZ SPACES
10
Example 3.8. The map T : C ([0, 1]) → C ([0, 1]) defined by (T f )(x) = x f (x) is a lattice homomorphism. If f ∧ g = 0, then for each x ∈ [0, 1] we have min( f (x), g (x)) = 0. It follows that the minimum of x f (x) and xg (x) is zero for all x ∈ [0, 1] as well. In other words, f ∧ g = 0 ⇒ T f ∧ T g = 0.
To verify that π is a lattice homomorphism, it suffices to check whether preserves any one of the
operations ∧, ∨, + , − , or | · |:
Proposition 3.9. The following conditions on an operator π : L → M are equivalent:
(i) π(u) ∧ π(v) = 0 for all u ∧ v = 0 in L.
(ii) π(u ∧ v) = π(u) ∧ π(v) for all u, v ∈ L.
(iii) π(u ∨ v) = π(u) ∨ π(v) for all u, v ∈ L.
(iv) π(u + ) = π(u)+ for all u ∈ L.
(v) π(u − ) = π(u)− for all u ∈ L.
(vi) π(|u|) = |π(u)| for all u ∈ L.
Proof. (i) ⇒ (ii). Since (u − u ∨ v) ∧ (v − u ∨ v) = 0, we have π(u − u ∨ v) ∧ π(v − u ∨ v) = 0. By the
linearity of π, we have π(u − u ∨ v) = π(u) − π(u ∨ v) and π(v − u ∨ v) = π(v) − π(u ∨ v), so we can
apply (ii) of Proposition 3.4 to obtain (ii).
(ii) ⇒ (i) follows from observing that π(0) = 0, which by (i) of Definition 3.2 holds for any operator.
(ii) ⇐⇒ (iii) follows from (ii) and (iii) of Proposition 3.4.
(ii) ⇒ (v) and (iii) ⇒ (iv) follow from taking v = 0 in (ii) and (iii), respectively.
(iv) ⇐⇒ (v) follows from (i) of Proposition 3.4.
(iv) and (v) ⇒ (vi) follows from (ix) of Proposition 3.4.
(vi) ⇒ (ii) and (vi) ⇒ (iii) follow from (vi) and (vii) of Proposition 3.4, respectively.
A bijective lattice homomorphism is called a lattice isomorphism, and L and M are said to be
lattice isomorphic if there exists a lattice isomorphism from L to M .
3.4 Vector sublattices
A subset M of a lattice L for which the supremum and infimum of every pair of elements in
M is also in M is called a sublattice of L. If L is a vector lattice and M is a sublattice which is
additionally a vector subspace of L, then M is said to be a vector sublattice or Riesz subspace of
L.
Example 3.10. Let X be a topological space. Then C (X ) is a vector sublattice of R X .
Example 3.11. The union A of the two lines {(x, x) : x ∈ R} and {(x, −x) : x ∈ R} is not sublattice
in R2 , even though any pair of points in A has a supremum and an infimum in A. The problem
is that the supremum of the pair of points taken in R2 is not generally in A. For example, the
supremum of (1, −1) and (−3, 3) in R2 is (1, 3) ∉ A. (However, the supremum of these points in A
is (3, 3).)
11
3 RIESZ SPACES
Every subset A of L gives rise to a unique smallest vector sublattice containing A, called the
vector sublattice generated by A.
Proposition 3.12. For any subset A ⊂ L, the intersection L A of all vector sublattices containing
A is a sublattice.
Proof. Let A denote the collection of all vector sublattices containing A. This collection is
nonempty, since it contains L. Moreover, if v and w are vectors in L A , λ ∈ R, then λv and v + w
are in L A since they are in every vector subspace in the collection A . Likewise, v ∨ w and v ∧ w
are in L A since they also are in every vector sublattice in A .
3.5 Banach Lattices
Definition 3.13. Let X be a vector space, and let k · k be a function from X into [0, ∞) for which
(i) kλxk = |λ|kxk for all λ ∈ R and x ∈ X ,
(ii) kx + yk ≤ kxk + kyk for all x, y ∈ X , and
(iii) kxk = 0 ⇒ x = 0.
Then X is called a normed vector space, and k · k is called a norm.
A sequence (x n )n∈N of elements of a normed vector space X is called Cauchy if for every ² > 0
there exists a natural number N so that for all m ≥ n ≥ N , we have kx m − x n k < ². A sequence
(x n )n∈N in a normed vector space is said to converge to x ∈ X if for all ² > 0 there exists a natural number N so that for all n ≥ N , we have kx − x n k < ². A normed vector space in which
every Cauchy sequence converges is called a complete normed vector space or Banach space. If
( X̃ , k · k∼ ) is a complete normed vector space and j : X → X̃ is norm-preserving, i.e.,
kxk = k j (x)k∼ for all x ∈ X ,
(3.1)
and if j [X ] is dense in X̃ , we say that X̃ is a completion of X . Actually, every normed vector
space admits a completion [6, 2].
Proposition 3.14. If X is a normed vector space, then there exists a completion X̃ of X .
Proof. We will build X̃ as a subspace of the normed vector space `∞ (X ) of bounded functions
on X , with the supremum norm k · k∞ defined by k f k∞ = sup{| f (x)| : x ∈ X }. We first verify that
`∞ (X ) is complete. If we have a Cauchy sequence f n ∈ `∞ (X ), then for each x ∈ X , the sequence
( f n (x))n∈N is Cauchy. Using the completeness of the real numbers, then, we find a limit f (x) for
the sequence ( f n (x))n∈N . Then, letting m → ∞ in k f m − f n k∞ ≤ ², we get that f n converges to f
with respect to the supremum norm.
For each x ∈ X , define the function f x ∈ `(X ) by f x (y) = kx − yk for all y ∈ X . We claim that
k f x − f y k∞ = kx − yk for all x, y ∈ X . By (ii) of Definition 3.13, | f x (t ) − f y (t )| ≤ kx − yk for all
t ∈ X . Conversely, kx − yk = f x (y) − f y (y) ≤ k f x − f y k∞ . Let j map x ∈ X to f x − f 0 (where 0 is
the zero vector in X ). As previously observed, f x − f 0 is in `∞ (X ), since it is bounded above by
kx − 0k = kxk. Then k j (x)k∞ = k f x − f 0 k∞ = kx − 0k = kxk. If we take X̃ to be the closure of j [X ]
in `∞ (X ), then by construction j [X ] will be dense in X̃ . Note also that X̃ is complete, since it
is a closed subset of a complete space. Observe that the norm of X̃ can be specified in terms
3 RIESZ SPACES
12
of norm of X (without reference to the `∞ norm), as kuk∼ = limn k j ← (u n )k for any sequence
u n ∈ j [X ] converging to u.
We also have to give X̃ a vector space structure, since j does not preserve the vector space
structure of X . (In fact j (x) + j (y) as an element of `∞ (X ) is not in j [X ], in general. It’s best at
this point to forget altogether the natural vector addition and scalar multiplication in `∞ (X ).)
For any u, v ∈ j [X ] with j (x) = u and j (y) = v, define u +v and λu to be j (x + y) and j (λx). Then
by construction j does preserve the vector addition and scalar multiplication in X . For u and
v in the closure of j [X ], take sequences u n → u and v n → v with u n and v n in j [X ], and define
u + v and λu to be the limits of u n + v n and λu n respectively. These limits are guaranteed to
exist, since the sequences u n + v n and λu n are Cauchy, and it’s easy to verify that X̃ is a vector
space under these operations.
We remark that the completion of a normed vector space is actually unique up to a linear normpreserving bijective map [2]. We omit this result since we do not need it, but we will sometimes
refer to “the” completion of a normed vector space.
If a Riesz space is equipped with a norm for which |u| ≤ |v| ⇒ kuk ≤ kvk for all u, v ∈ L, then k · k
is called a Riesz norm. A complete normed Riesz space is called a Banach lattice.
Definition 3.15. A Riesz norm k · k on a Riesz space L that satisfies kx ∨ yk = max(kxk, kyk) for
all x, y ∈ L + is called an M -norm. A complete normed vector space whose norm is an M -norm
is called an M -space.
For an example of an M -space, see Proposition 3.28.
3.6 Algebraic Operators
If an operator T maps a vector space L (over the real numbers) into L, then we can define powers
of T as follows. T 0 is defined to be the identity operator and T r is defined to be the operator
v 7→ T (T r −1 (v)) for all r ≥ 1. Polynomial functions of T are defined using this definition of
powers as well as the scalar multiplication and vector addition in L.
Definition 3.16. An operator T on a vector space L is algebraic if there exists a nonzero polynomial
p(x) = a n x n + a n−1 x n−1 + · · · + a 1 x + a 0
for which p(T ) is the zero operator, i.e. [p(T )](v) = 0 for all v ∈ L. Such a polynomial is said to
annihilate T .
By omitting terms if necessary, we are free to take a n , 0, and then by dividing p(x) by a n ,
we may assume that a n = 1. Such a polynomial with leading coefficient 1 is said to be monic.
We provide some definitions and lemmas to prove that there is a unique monic annihilating
polynomial of minimum degree.
Definition 3.17. Let R be a set and let + and · be operations from R × R to R. R is called a
commutative ring with identity if
(i) (r + s) + t = r + (s + t ) for all r, s, t in R,
(ii) r + s = s + r for all r, s ∈ R,
13
3 RIESZ SPACES
(iii) there exists an element 0 ∈ R for which r + 0 = r for all r ∈ R,
(iv) for every r ∈ R, there exists an element −r for which r + (−r ) = 0,
(v) r · (s · t ) = (r · s) · t for all r, s, t ∈ R,
(vi) r · s = s · r for all r, s ∈ R,
(vii) there exists an element 1 ∈ R so that 1 · r = r for all r ∈ R, and
(viii) r · (s + t ) = r · s + r · t for all r, s, t ∈ R.
The set of all polynomials with real coefficients (under the usual polynomial addition and multiplication) is a commutative ring with identity. The degree of a nonzero polynomial defined to
be the highest power of x whose coefficient is nonzero, and the degree of the zero polynomial is
left undefined. As with scalar multiplication in vector spaces, we will denote ring multiplication
by juxtaposition.
Definition 3.18. Let R be a commutative ring with identity. If I ⊂ R is a ring and if r a ∈ I for all
a ∈ I and r ∈ R, then I is called an ideal of R. For any fixed element s ∈ R, the set {r s : r ∈ R}
of all multiples of s is an ideal, called the principal ideal generated by s. If every ideal in R is a
principal ideal, then R is called a principal ideal domain.
Proposition 3.19. The ring R[x] of polynomials with real coefficients is a principal ideal domain.
Proof. Let I be a nonzero ideal in R[x]. The set of degrees of the nonzero polynomials in I is
bounded below and hence has a minimum, so we may take a polynomial h ∈ I with minimum
degree. Then for any other g ∈ I , we can divide g by h to obtain a quotient q and a remainder r
whose degree (if it’s defined) is less than that of h. Then by the polynomial division algorithm,
we obtain g = qh + r ⇒ r = g − qh, so r is the difference between two members of the ideal.
Thus r ∈ I , so by the minimality of h’s degree, r must be the zero polynomial. In other words,
any g ∈ I is a multiple of h, which concludes the proof that R[x] is a principal ideal domain. Theorem 3.20. Let T be an operator on a vector space. If some nonzero polynomial annihilates
T , then there exists a unique monic polynomial of minimum degree which annihilates T , called
the minimal polynomial of T .
Proof. The set of polynomials which annihilate T is an ideal in R[x], since the sum of two annihilating polynomials is annihilating, and q(T )p(T ) = 0 whenever p(T ) = 0. Since R[x] is a
principal ideal domain, the set of annihilating polynomials consists of the multiples of a single
polynomial. If f and g are two such polynomials, then each is a multiple of the other, hence
they differ by a constant factor. If we choose this factor so the generating polynomial’s leading
coefficient is 1, then the minimal polynomial is uniquely determined.
Example 3.21. Let T : RN → RN be defined by
f (2)
if n = 1
f (n − 2) if n ≡ 1 (mod 3) and n , 1
(T f )(n) =
f (n + 1) otherwise
Then the minimal polynomial of T is p(T ) = T 4 − T .
14
3 RIESZ SPACES
Example 3.22. The operator Tθ0 : C (R2 ) → C (R2 ) defined by (Tθ0 f )((r cos θ, r sin θ)) = f ((r cos(θ+
θ0 ), (r sin(θ + θ0 )))) is algebraic if and only if θ0 /π is rational.
3.7 Disjointness Preserving Operators
Let L and M be Riesz spaces. Two elements v and w in L are disjoint (written v ⊥ w) if |v|∧|w| =
0. In C (X ), f ⊥ g if and only if f g = 0. An operator T : L → M is said to be disjointness preserving
if it maps every pair of disjoint vectors to a pair of disjoint vectors. In other words, T : L → M is
said to be disjointness preserving if
u ⊥ v ∈ L ⇒ Tu ⊥ T v ∈ M .
Since we will be taking powers of disjointness preserving operators, we verify that powers of
disjointness preserving operators are again disjointness preserving.
Proposition 3.23. If T is a disjointness preserving operator on a vector lattice and k is a natural
number, then T k is also disjointness preserving.
Proof. We use induction on k. The base case follows by definition. For k > 1, assume that |u| ∧
|v| = 0 ∈ L ⇒ |T k−1 u| ∧ |T k−1 v| = 0. Calculate |u| ∧ |v| = 0 ⇒ |T k−1 u| ∧ |T k−1 v| = 0 ⇒ |T T k−1 u| ∧
|T T k−1 v| = 0 ⇒ |T k u| ∧ |T k v| = 0.
Example 3.24. A function f : [0, ∞) → R is essentially polynomial if there is a positive real number x f and a polynomial p f so that for all x > x f , p f (x) = f (x). The set L of all essentially polynomial functions on [0, ∞) is an Archimedean vector lattice (under pointwise order), since for any
two polynomials one eventually dominates the other. The function f 7→ p f (0) is a disjointnesspreserving operator on L [3].
The operators in examples 3.21 and 3.22 also are disjointness preserving.
3.8 Order Ideals and Bands
A Riesz subspace A of a Riesz space L is called an order ideal if |u| ≤ v and v ∈ A imply that u ∈ A.
For any e ∈ L + , the set
[
Le B
{u : −ne ≤ u ≤ ne}
n∈N
is called the principal ideal generated by e. It is easy to verify that a principal ideal is an ideal. If
for some e ∈ L + we have L = L e , then we say that e is a strong order unit of L. In other words, the
absolute value of every element of a Riesz space with strong order unit is dominated by some
scalar multiple of the strong order unit. Observe that the generating element e of a principal
ideal L e is a strong order unit in L e .
A net u : Σ → L in a Riesz space L is said to be increasing if σ1 ≺ σ2 ⇒ u σ1 ≤ u σ2 and decreasing
if σ1 ≺ σ2 ⇒ u σ2 ≤ u σ1 . We use the notation u σ ↑ v to mean that u is an increasing net and
that the supremum of the set {u σ : σ ∈ Σ} exists and equals v, and similarly u σ ↑ v means that
u σ is an decreasing net and the infimum of {u σ : σ ∈ Σ} exists and equals v. An ideal B in a
Riesz space L is called a band if for every increasing net (u σ )σ∈Σ in B ∩ L + u σ ↑ v ∈ L ⇒ v ∈ B .
15
3 RIESZ SPACES
f n (x)
1
x
1
n
1
Figure 3: The sequence ( f n (x))n∈N shows that { f ∈ C ([0, 1]) : f (0) = 0} is
not a band in C ([0, 1]).
The disjoint complement of a nonempty subset A of a Riesz space L is defined by A d B {v ∈ L :
u ⊥ v for all u ∈ A}. If a band B in a Riesz space L has the property that L = B ⊕ B d , then we
call B a projection band. The projection P B associated with a projection band B is defined by
P B (u) = u 1 , where u = u 1 + u 2 is the unique representation of u as the sum of a vector u 1 in B
and a vector u 2 in B d .
Example 3.25. In C ([0, 1]), collection of constant functions is a Riesz space but not an ideal.
The set A of functions f for which f (0) = 0 is an ideal but not a band. To see that it is not a band,
define
½
nx if 0 ≤ x ≤ 1/n
f n (x) =
1 if 1/n ≤ x,
(see Figure 3). Then ( f n (x))n∈N is a sequence in A for which f n ↑ 1, and 1 ∉ A. The set B of
functions which are zero on [0, 1/2] is a band, because the supremum of any set of functions in
B (if it exists) is also in B (see Proposition 3.26 for a proof ). The disjoint complement of B is the
set of functions which are zero on [1/2, 1], which shows that B is not a projection band.
Proposition 3.26. If X is a completely regular topological space and if U ⊂ X is open, then
B B { f ∈ C (X ) : f (x) = 0 for all x ∈ U } is band in C (X ).
Proof. Suppose ( f σ )σ∈Σ is an increasing net in B converging to g ∈ C (X ). Suppose that g (x 0 ) , 0
for some x 0 ∈ U . By the continuity of g , we identify an neighborhood U1 of x 0 for which g (x) , 0
for all x ∈ U1 . Set V B U ∩U1 , and by the complete regularity of X we find a function k for which
k(x 0 ) = 1 and k| X \V = 0. Then g (1 − k) is an upper bound for { f σ : σ ∈ Σ} which is less than but
not equal to g , contradicting f σ ↑ g .
Proposition 3.27. If X is a completely regular topological space and if A ⊂ X is both open and
closed, then B B { f ∈ C (X ) : f (x) = 0 for all x ∈ U } is a projection band.
Proof. By Proposition 3.26, we only need to show that C (X ) = B ⊕ B d . Let f ∈ C (X ), and define
f 1 (x) =
½
f (x) if x ∈ A
0
if x ∈ X \A,
16
3 RIESZ SPACES
and
f 2 (x) =
½
0
if x ∈ A
f (x) if x ∈ X \A.
Clearly f 1 ∈ B , f 2 ∈ B d , and f = f 1 + f 2 . We need to show that f 1 and f 2 are continuous. Let
(x σ )σ∈Σ be a net in X converging to a ∈ X . If a ∈ A, then a tail of (x σ )σ∈Σ is in A (since A is open)
and on this tail we have f 1 (x σ ) = f (σ). Thus f 1 (x σ ) → f 1 (a) by f ’s continuity. Similarly, since
X \A is open and the zero function is continuous, f 1 (x σ ) → f 1 (a) if a ∈ X \A. Thus by Theorem
2.2, f 1 is continuous. An analogous argument shows that f 2 is continuous. The uniqueness of
the representation of f as a sum of functions in B and B d is obvious.
Proposition 3.28. For every principal order ideal L e in an Archimedean Riesz space L, the function kxke = inf{λ > 0 : |x| ≤ λe} is an M -norm on L e . Moreover, the completion of L e is an
M -space.
Proof. Requirement (i) is easy to verify from the definition. For (ii), write
kxke + ky e k = inf{λ > 0 : |x| ≤ λe} + inf{λ > 0 : |y| ≤ λe}
= inf{λ1 + λ2 > 0 : |x| ≤ λ1 e and |y| ≤ λ2 e}
≥ inf{λ1 + λ2 > 0 : |x| + |y| ≤ (λ1 + λ2 )e}
≥ inf{λ1 + λ2 > 0 : |x + y| ≤ (λ1 + λ2 )e} = kx + yke
Requirement (iii) follows from the Archimedean property of L. We also need to verify that kx ∨
yk∼ = max(kxk∼ , kyk∼ ) for all x, y ∈ L̃ +
e , where k · k∼ denotes the norm in the completion of L e .
First, assume that x, y ∈ L e . Without loss of generality, we may assume that kxke ≥ kyke . This
says that x ≤ λe ⇒ y ≤ λe, so
kxke = inf{λ > 0 : x ≤ λe} = inf{λ > 0 : x ∨ y ≤ λe} = kx ∨ yke ,
as desired. Take x, y ∈ L̃ e . Again, without loss of generality assume that kxk∼ ≥ kyk∼ . Choose
sequences x n → x and y n → y in L e so that kx n ke ≥ ky n ke ¯for all n. ¯Observe that in a Banach
lattice, we have x n → x ⇒ |x n | → |x|. To see this, notice that ¯|x| − |x n |¯ ≤ |x − x n | by (x) of Proposition 3.4. Thus k|x| − |x n |k ≤ kx − x n k, and the latter quantity goes to 0 as n → ∞. Then by (vi)
of Proposition 3.4, we have also that x n ∨ y n → x ∨ y if x n → x and y n → y. Thus
kx ∨ yk∼ = lim kx n ∨ y n k = lim kx n ke = kxk∼ .
n
n
3.9 The Riesz Space of Order Bounded Operators
A subset A of a Riesz space L is said to be order bounded if there exist v, w ∈ L with v ≤ x ≤ w for
all x ∈ A. An operator T from L to another Riesz space M is called an order bounded operator if
it maps order bounded sets to order bounded sets, in other words if T [A] is order bounded in
M for every order bounded A ⊂ L.
Example
3.29. If (X , µ) is a measure space, then the operator from L 1 (µ) to R defined by f 7→
R
1
1
f d µ is order bounded,
R since an
R element
R g ∈ L (µ) which is bounded above by h ∈ L (µ) and
1
below by f ∈ L (µ) has f d µ ≤ g d µ ≤ h d µ.
17
3 RIESZ SPACES
Example 3.30. The operator in Example 3.24 is not order bounded. For an example of an order
bounded set whose image is no order bounded, define for all n ∈ N
f n (x) =
½
0
if 0 ≤ x ≤ n
−4n(x − n) if n < x.
The set { f n }n∈N is order bounded, since −x 2 ≤ f n ≤ 0. However, p f n (0) = 4n 2 , so the set {p f n (0)}n∈N
of images of { f n }n∈N under f 7→ p f (0) is not an order bounded subset of R.
We will denote the set of order bounded operators from a Riesz space L to a Riesz space M by
Lb (L, M ). If M = R, then we call Lb (L, M ) the order dual of L, denoted by L ∼ . As we will verify
in Theorem 3.32 below, when M is Dedekind complete, Lb (L, M ) is actually a Riesz space with
addition defined by (S + T )(v) = S(v) + T (v), scalar multiplication defined by (λT )(v) = λT (v)
for λ ∈ R, and order defined by S ≤ T if S(v) ≤ T (v) for all v ∈ L + . We begin with a lemma.
Lemma 3.31. Let L and M be Archimedean Riesz spaces, and let T : L + → M + satisfy T (u + v) =
T (u) + T (v) for all u, v ∈ L + . Then T can be extended uniquely to a positive operator Te from L
to M , given by
Te (u) = T (u + ) − T (u − ),
(3.2)
for all u ∈ L.
Proof. First we will show that Te (u + v) = Te (u) + Te (v). Anytime u is written as the difference
u 1 − u 2 of two positive vectors u 1 and u 2 , we can rearrange u + − u − = u 1 − u 2 to get u + + u 2 =
u 1 + u − . Applying T to both sides and rearranging again, we get T (u + ) − T (u − ) = T (u 1 ) − T (u 2 ),
so Te (u 1 − u 2 ) = Te (u 1 ) − Te (u 2 ) whenever u 1 and u 2 are positive. Then for u and v in L,
Te (u + v) = Te (u + − u − − (v + − v − ))
= Te (u + + v − − (v + + u − ))
= Te (u + + v − ) + Te (v + + u − )
= Te (u) + Te (v).
The additivity of Te gives
Te (nu) = nTe (u)
(3.3)
Te (v)n −1 = Te (vn −1 ).
(3.4)
for positive integers n, by induction. Since Te (−u) = T ((−u)+ ) − T ((−u − )) = T ((u)− ) − T (u + ) =
−Te (u), (3.3) actually holds for all integers n. Writing v = nu in (3.3) gives
It follows from (3.3) and (3.4) that Te (r u) = r Te (u) for every rational number r .
Let λ ∈ R, and first suppose that u ∈ L + . First, observe that
u ≥ v ⇒ Te (u) = Te (u − v) + Te (v) = T (u − v) + Te (v) ≥ Te (v).
Then let (r n )n∈N and (r n )n∈N sequences of rational numbers for which r n ↑ λ and s n ↓ λ. Then
r n Te (u) = Te (r n u) ≤ Te (λu) ≤ Te (s n u) ≤ s n Te (u).
18
3 RIESZ SPACES
Taking n → ∞ and using the Archimedean property of M , we get that Te (λu) = λTe (u) for u ∈ L + .
Let u ∈ L, and write
Te (λu) = Te (λu + − λu − ) = Te (λu + ) − Te (λu − )
= λTe (u + ) − λTe (u − ) = λTe (u + − u − ) = λTe (u).
We can now prove that Lb (L, M ) is a Riesz space when M is Dedekind complete. We will also
characterize its lattice operations [1].
Theorem 3.32. Let L and M be Riesz spaces, with M Dedekind complete. Then Lb (L, M ) is a
Riesz space under the partial order T1 ≤ T2 if T1 (v) ≤ T2 (v) for all v ∈ L + . Moreover, the lattice
operations in Lb (L, M ) are given by
(i) T + (v) = sup {T (u) : 0 ≤ u ≤ v}
(ii) T − (v) = sup {−T (u) : 0 ≤ u ≤ v}
(iii) |T |(v) = sup {|T (u)| : |u| ≤ v},
for all T ∈ Lb (L, M ) and v ∈ L + .
Proof. (i) Define T p (v) = sup {T (u) : 0 ≤ u ≤ v}. First, we will show that T p is linear. Since T p :
L + → M + , it suffices to show that T p (v)+T p (w) = T p (v +w) for all v, w ∈ L + , for then Lemma 3.31
extends T to a linear operator on all of L. So let v, w ∈ L + , and observe that for any 0 ≤ u 1 ≤ v
and 0 ≤ u 2 ≤ w, we have T (u 1 ) + T (u 2 ) ≤ T (u 1 + u 2 ) ≤ T p (v + w). This implies T p (v) + T p (w) ≤
T p (v + w). Conversely, let 0 ≤ u ≤ v + w. By the Riesz decomposition theorem, we can write u
as u = u 1 + u 2 so that 0 ≤ u 1 ≤ v and 0 ≤ u 2 ≤ w. Then T (u) = T (u 1 ) + T (u 2 ) ≤ T p (v) + T p (w).
To show that T p = T + = T ∨ 0, we need to show that for all S,
T (v) ≤ S(v) and 0 ≤ S(v) for all v ∈ L + ⇒ T p (v) ≤ S(v).
This follows from the monotonicity of the positive operator S on L + : For all 0 ≤ u ≤ v, we have
T (u) ≤ S(u) ≤ S(v), so T p (v) ≤ S(v).
Formula (ii) follows immediately from the identity v − = (−v)+ . For (iii), write |T | = T + + T − and
observe that
sup {T (u) : 0 ≤ u ≤ v} + sup {−T (u) : 0 ≤ u ≤ v} = sup {T (u 1 − u 2 ) : 0 ≤ u 1 , u 2 ≤ v}
= sup {|T (u)| : |u| ≤ v} .
If the order bounded operator T is also disjointness preserving, then the decomposition T =
T + − T − can be achieved even when M is not Dedekind complete M (we refer the reader to [11]
for a proof).
Theorem 3.33. If T is an order bounded disjointness preserving operator on a Riesz space L,
then there exist lattice homomorphisms |T |, T + , and T − so that |T |(x) = |T (x)|, T + x = (T (x))+ ,
and T − x = (T (x))− for all x ∈ L. Also, |T (|x|)| = |T |(x) = |T (x)| for all x ∈ L.
3.10 Orthomorphisms
We now generalize the concept of a diagonal matrix operator to a “diagonal” operator on an
arbitrary Riesz space. In Rn , a matrix T is diagonal when restricted to an invariant subspace U
4 RIESZ SPACES OF CONTINUOUS FUNCTIONS
19
of Rn if there is a basis for U with respect to which the matrix of the restriction of T is diagonal.
In this basis it is easy to see that u ⊥ v ∈ A ⇒ Tu ⊥ v. Conversely, if this condition is met for all
u and v in A, we can see that the matrix representing T | A is diagonal. For an order bounded
operator on a Riesz space, the term orthomorphism is used rather than diagonal.
Definition 3.34. Let L be a Riesz space, let T be an order bounded operator T : L → L and let
A be a T -invariant subset of L. If u ⊥ v ⇒ Tu ⊥ v for all u, v ∈ A, then T is called an orthomorphism on A.
Example 3.35. Let (X , M , µ) be a measure space, and consider the Riesz space L p (µ) (under
pointwise order). For any bounded measurable function g on X , the map f 7→ f g is an orthomorphism from L p (µ) to L p (µ).
4 RIESZ SPACES OF CONTINUOUS FUNCTIONS
4.1 Zero-sets and Completely Regular Topological Spaces
Definition 4.1. A subset Z of a topological space X is called a zero-set of X if there exists f ∈
C (X ) for which Z = f ← [{0}].
Theorem 4.2. The zero-sets of X form a base for the closed sets in the topology generated by
C (X ).
Proof. The collection of all sets of the form (−∞, r ] or [s, ∞) for real numbers r and s form a
subbase for the closed sets in R, so by Theorem (2.7) their preimages form a subbase for the
closed sets in X . Also, the preimages f ← [[r, ∞)] and f ← [(−∞, r ]] are zero-sets of the functions
( f − r ) ∧ 0 and ( f − r ) ∨ 0, respectively. Conversely, every zero-set takes the form f ← [[r, ∞)] for
some f ∈ C (X ). In particular if Z = g ← [{0}], then we can take f = −|g |. All together, we have
shown that the zero-sets form a subbase for the closed sets in X . However, the collection of
zero-sets is closed under finite unions, because f ← [{0}] ∪ g ← [{0}] = ( f g )← [{0}].
Corollary 4.3. If X is a completely regular topological space, then C (X ) determines the topology of X .
Proof. The definition of complete regularity implies that every closed set in X may be written as
an intersection of zero-sets. Thus the zero-sets form a base for the closed sets of X . The result
then follows from Theorem 4.2.
Recall that a topological space X is completely regular if (i) it is Hausdorff and (ii) for every
closed F and x ∈ X − F , there is an f ∈ C (X ) with f (x) = 1 and f (y) = 0 for all y ∈ F . When
studying Riesz spaces of the form C (X ), we may assume without loss of generality that X is
completely regular, as Theorem 4.5 shows.
Definition 4.4. A collection F of real-valued functions on a topological space X is said to distinguish points of X if for every distinct x and y in X there is an f ∈ F for which f (x) , f (y).
20
4 RIESZ SPACES OF CONTINUOUS FUNCTIONS
Theorem 4.5. For any topological space X there is a continuous map η from X onto a completely regular space ρX for which any continuous f : X → R lifts to a function f ρ : ρX → R for
which f = f ρ ◦ η. Moreover, the map f 7→ f ρ is a lattice isomorphism between C (X ) and C (ρX ).
η
X
ρX
ρf
f
R
Proof. Define ρX to consist of the equivalence classes of points of X which are not distinguished by continuous functions on X . In other words, x ∼ x 0 if f (x) = f (x 0 ) for all f ∈ C (X ).
Then η just maps points of X to their equivalence classes. For each f ∈ C (X ), define f ρ to map
each equivalence class in ρX to the common value achieved by f on members of that equivalence class. By definition, f = f ρ ◦ η for all f ∈ C (X ). Give ρX the topology induced by the
collection of functions { f ρ : f ∈ C (X )}. For any continuous function g from ρX to R, the composition g ◦ η is continuous, so g = f ρ for some f ∈ C (X ). In other words, the map f 7→ f ρ is
a bijection between C (X ) and C (ρX ). Moreover, this map is also a lattice isomorphism, since
f ≤ g in C (X ) if and only if f (x) ≤ g (x) for all x ∈ X , which implies that f ([x]) ≤ g ([x]) for all
equivalence classes [x] in X . Hence it remains only to show that ρX is completely regular.
First, it is clear from the construction that the continuous functions on ρX distinguish points
of X . It follows that ρX is Hausdorff, since we may take for any x , y an f ∈ C (X ) for which
f (x) , f (y), and then take inverse images of two disjoint neighborhoods of f (x) and f (y) in
R. In light of 4.2, any closed set F ⊂ ρX is an intersection of zero sets. This means that for any
x ∉ F , we can find a zero set g ← [0] containing F but not {x}. Then f B g /g (x) has f [F ] = {0} and
f (x) = 1, as desired. Thus ρX is completely regular.
4.2 The Stone-Čech Compactification
A compact space into which a space X is densely embedded is called a compactification of X .
The simplest way to obtain a compactification of a space is to append the symbol ∞, whose
neighborhoods are defined to be complements of compact sets:
Definition 4.6. The one-point compactification X ∞ of a non-compact topological space X is
the set X ∪ {∞} (where ∞ ∉ X ) whose open sets are the open sets of X along with every set
containing ∞ whose complement is compact.
The space X ∞ is compact since every open cover has at least one neighborhood of ∞, and X is
dense in X ∞ because X itself is not closed. Notice that not every real-valued continuous function on X has a continuous extension to X ∞ . As a simple example, consider the sine function on
R. However, we will see that for any completely regular topological space X , there is an essentially unique Hausdorff compactification βX , called the Stone-Čech compactification of X , for
21
4 RIESZ SPACES OF CONTINUOUS FUNCTIONS
R
g ◦σ
X
g
σ
σ[X ]
P
Figure 4: The relationship between X , σ[X ], and P .
which every bounded real-valued continuous function on X can be extended to a real-valued
continuous function on all of βX .
Theorem 4.7. Every completely regular topological space X has a Hausdorff compactification
βX for which every bounded real-valued continuous function on X extends uniquely to a realvalued continuous function on βX .
∗
Proof. Let P = RC (X ) , in other words the collection of real-valued functions on C ∗ (X ) equipped
with the product topology. We associate with each x ∈ X the point evaluation σx in P : (σx)( f ) =
f (x). Define βX to be the closure in P of σ[X ]. Because every f ∈ C ∗ (X ) is bounded, the closure
I f of the range of f is compact, and σ[X ] is contained in f I f . By Tychonoff’s theorem, f I f
is compact, so βX is also compact (Theorem 2.6). Also, by definition X (under the association
x 7→ σx) is dense in βX . It remains to be shown that X is embedded in βX , and that every
bounded continuous function on X extends to a function on βX .
To see that σ is a homeomorphism from X to σ[X ] define the projections π f : P → R by π f (p) =
p( f ). Because the topology on P is determined by the family of projections {π f : f ∈ C ∗ (X )},
the continuity of every π f ◦ σ is sufficient to establish the continuity of σ [10]. But π f ◦ σ = f for
every f ∈ C ∗ (X ), so σ is continuous. Moreover, every f arises as a composition of an element of
C (P ) and σ, namely as π f ◦ σ. This implies that σ is injective, since σx 1 = σx 2 ⇒ f (x 1 ) = f (x 2 )
for all f ∈ C ∗ (X ). Therefore,
σ← is a well defined function from σ[X ] to X , and it is continuous
¯
←
¯
since f ◦ σ is π f σ[X ] for every f ∈ C ∗ (X ). Thus σ is a homeomorphism between X and σX .
¯
¯
Finally, every continuous function g on σ[X ] is π f ¯σ[X ] for some f (namely g ◦σ), and then π f ¯Y
provides a continuous extension of g on any subset σ[X ] ⊂ Y ⊂ P . Notice that because σ[X ] is
dense in its closure, the continuous extension of any f from X to βX is necessarily unique. We will show that we may extend maps on X to all of βX under more general conditions.
Theorem 4.8. Any continuous map from completely regular space X into a compact Hausdorff
space K extends uniquely to a continuous map from βX to K .
Proof. For each g ∈ C ∗ (K ), write I g for the range of g (I g is compact, since K is compact), and
5 DISJOINTNESS PRESERVING OPERATORS ON C(X)
22
embed K into g I g as in the previous theorem. Then we can extend g ◦ f : X → I g to a contin
uous function β(g ◦ f ) on all of βX , and define h : βX → g I g by
[h(p)](g ) → [β(g ◦ f )](p).
Again, h is continuous since its composition with each projection πg is continuous. We only
need to show that h is actually into K , in other words, that the image of βX under h is contained
in the image of K in g I g . This follows from K ’s compactness and the observation that β(g ◦
f )[X ] is contained in I g = g [K ]. Again, uniqueness of the extension follows from the fact that
any two extensions of f must agree on X , which is dense in βX .
Corollary 4.9. The Stone-Čech compactification of a completely regular space is unique up to
a homeomorphism which leaves points of X fixed.
4.3 The Realcompactification
Let X be a completely regular space. Since the one-point compactification R∞ of the real numbers is a compact Hausdorff space, it follows that every f ∈ C (X ) extends uniquely to a function
f ∗ from βX → R∞ , by Theorem 4.8. The realcompactification υX of X is defined to be the collection of points x in βX for which f (x) , ∞ for all f ∈ C (X ). If X = υX , then X is said to be
realcompact. Clearly X ⊂ υX ⊂ βX , and X is dense in υX . Moreover, by construction every
continuous function on X extends to a continuous function on υX . This extension provides a
natural correspondence between C (X ) and C (υX ) which allows us to assume without loss of
generality when studying the Riesz spaces C (X ) that X is realcompact.
Theorem 4.10. If X is a completely regular topological space, then C (υX ) is lattice isomorphic
to C (X ).
¯
Proof. Denote by υ the map that sends f ∈ C (X ) to the restriction f υ B¯ f ∗ ¯υX of the extension
of f to βX . Clearly υ is bijective, and its inverse maps f ∈ C (υX ) to f ¯ X . By Proposition 3.9 it
suffices to show that f υ ∨ g υ = ( f ∨ g )υ . This is almost immediate from Proposition 2.3. First
observe that since X is dense in υX , we have f ≤ g if and only if f υ ≤ g υ . Then ( f ∨ g )υ is an
upper bound for f υ and g υ since f ≤ f ∧ g and g ≤ f ∧ g . Also, if h υ is an upper bound for f υ
and g υ , then h ≥ f ∧ g , so h υ ≥ ( f ∧ g )υ .
5 DISJOINTNESS PRESERVING OPERATORS ON C(X)
5.1 Supports of Riesz Seminorms
Definition 5.1. A Riesz seminorm on a Riesz space L is a function p from L to [0, ∞) for which
(i) p(λu) = |λ|p(u) for all λ ∈ R and v ∈ L,
(ii) p(u + v) ≤ p(u) + p(v) for all u, v ∈ L, and
(iii) |u| ≤ |v| ⇒ p(u) ≤ p(v) for all u, v ∈ L.
5 DISJOINTNESS PRESERVING OPERATORS ON C(X)
23
Notice that for any linear functional T , the map p(v) = |T |(|v|) is a Riesz seminorm. To see that
the third requirement is satisfied, notice that (iii) of Proposition 3.32 gives |u| ≤ |v| ⇒ |T |(|u|) ≤
|T |(|v|).
In this section, we will prove the representation (5.1) for a disjointness preserving operator T ,
and in the next section we will use this representation to set up the graph corresponding to T .
The material presented here is adapted from [5].
Definition 5.2. Call a compact
subset S of a topological space X a weak support
for a Riesz
¯
¯
seminorm p on C (X ) if f ¯S = 0 implies p( f ) = 0, and call S a support for p if f ¯S = 0 if and only
if p( f ) = 0.
Lemma 5.3. Every nonzero Riesz seminorm p on a realcompact space X has a support S ⊂ X .
Proof. Consider p as a Riesz seminorm on βX , the Stone-Čech compactification of X , by restricting p to C ∗ (X ) and associating each element of C ∗ (X ) with its unique extension to βX . Let
S be the collection of weak supports for p in βX . This collection is nonempty, because clearly
βX ∈ S . Also, if K 1 ∈ S and K 2 ∈ S , we claim that we have K 1 ∩ K 2 ∈ S as well.
¯
To see this, suppose that f ¯
= 0, and let ² > 0. Then U = {x ∈ βX : f (x) < ²} is an open set
K 1 ∩K 2
containing
K 2 ∩K 2 , and¯ ( f −²)+ = 0 on U . Using the complete regularity of X , take g ∈ C (βX ) so
¯
that g ¯K 1 ∩U c = 0 and g ¯K 2 = 1. Set M = sup{( f −²)+ (x) : x ∈ K 2 }, so that (M g )∧( f −²)+ = ( f −²)+
on K 2 . When two functions u and v agree on a weak support of p, p(u) = p(v), because we get
|p(u)−p(v)| ≤ p(u −v) from the triangle inequality for p. Hence p((M g )∧( f −²)+ ) = p(( f −²)+ ).
On the other hand, (M g ) ∧ ( f − ²)+ vanishes on U as well as K 1 ∩U c , so it vanishes on K 1 and
hence (M g ) ∧ ( f − ²)+ = 0 from which p(( f − ²)+ ) = 0. Notice that |( f − ²)+ − f | < ². By the
third
(Definition
5.1), this gives p(( f − ²)+ − f ) ≤ ²p(1), and then
¡ property
¢ of Riesz seminorms
¡
¢
+
+
|p ( f − ²) − p( f )| ≤ p ( f − ²) − f ≤ ²p(1). Taking ² → 0 gives p( f ) = 0, showing that K 1 ∩ K 2
is a weak support for p.
T
It follows that S = S is nonempty (note that ; ∉ S because ¯p is nonzero), and also S is
compact. We claim that S is a support for p. For suppose that f ¯S = 0. Then for all ² > 0, we
have that U = {x ∈ βX : f (x) < ²} is an open set containing S on which ( f − ²)+ = 0, so that
T
there is a finite collection of ¡elements¢ of S so that ni=1 K i ⊂ U . Since this intersection is a
weak support for p, we get p ( f − ²)+ = 0 and then p( f ) = 0 as above. Conversely, if p( f ) = 0
with a ∈ S and f (a) , 0, then we can form the set W = {x ∈ βX : | f (x)| > | f (a)|/2}, which will
contain a. However, then for all g which vanish on βX − W , we can set G = sup{g (x) x ∈ βX }
and calculate g ≤ 2G1W ≤ 4G f , so p(g ) ≤ 4G p( f ) = 0. Then βX − W is a weak support for p not
containing a, a contradiction.
Finally, we will show that S ⊂ X . It suffices to show that for all f ∈ C (X ) and x ∈ S, f ∗ (x) is finite,
for then S ⊂ υX = X . So let f ∈ C (X ). For all sequences δn of positive real numbers approaching
infinity, we may define the following function on R:
¡
¢
γ(x) = sup δn (x − n)+
n
Since γ is locally a finite supremum of continuous functions, γ is continuous. Suppose that for
all n ∈ N, p(( f − n)+ ) > 0. Then δn = n/p(( f − n)+ ) gives rise to a function γ for which p(δn ( f −
n)+ ) is unbounded. However, for every n ∈ N, we get δn (( f −n)+ ) ≤ γ◦ f . Therefore, p(δn ( f −n)+ )
5 DISJOINTNESS PRESERVING OPERATORS ON C(X)
24
is dominated by p(γ◦ f ), a contradiction. It follows then that there is an n for which p(( f −n)+ ) =
0 , and then actually p(( f − m)+ ) = 0 for all m ≥ n, since m ≥ n ⇒ ( f − m)+ ≤ ( f − n)+ . So we
can choose such an n for f , and similarly we can choose an n 0 which does the same for − f .
We claim that f (x) ∈ [−n 0 , n] for all x ∈ S. For if f (x) < −n 0 or f (x) > n, we would
³¡ have either
¢+ ´
¢
¡
+
0 +
,
> 0 or ( f −n) > 0 at a point x in the support of p, from which either p − f − n 0
−f −n
¢
¡
0 or p ( f − n)+ , 0, a contradiction. So S ⊂ X is the desired support for p.
Theorem 5.4. If T is an order bounded disjointness preserving operator on C (X ), then for all
x ∈ X , there either δx ◦ T is the zero functional or there exists a unique y ∈ X so that
¡
¢
δx ◦ T = (δx ◦ T )(1) δ y .
(5.1)
Proof. First, observe that if δx ◦ T is nonzero, then p( f ) = |δx ◦ T |(| f |) is a nonzero Riesz seminorm. Moreover, it is also a disjointness preserving
map fromª C (X ) into R. To see this, suppose
©
f ⊥ g ∈ C (X ) and p( f ) > 0. Since p(©f ) = sup |Tu(x)|ª: |u| ≤ f , we can find a u for which |u| ≤ g
and |(Tu)(x)| > 0. Then p(g ) = sup |T v(x)| : |v| ≤ g , and for all |v| ≤ g , we have u ⊥ v, so that
Tu ⊥ T v as well. Since (T v)(x) , 0, then (Tu)(v) = 0 for all |u| ≤ v, so p( f ) = 0 as desired.
We use the preceding lemma to find a support S for p. We claim that S consists of a single
element, which we may call y. For suppose that z , y is in S. Then because X is Hausdorff, we
can separate z and y with disjoint open neighborhoods U of y and V of z. Choose f to be zero
on U c and 1 at y similarly choose g to be zero on V c and 1 at z. Then f ⊥ g , so p( f ) ⊥ p(g ), yet
neither f nor g vanishes on the support of p, a contradiction. For all g ∈ C (X ) with g (y) = 0, we
have
¯
¯ ¯
¯
¯(δx ◦ T )(g )¯ ≤ ¯δx ◦ T ¯ (|g |) = p(g ) = 0,
so (δx ◦ T )(g ) = 0. For any f , substituting g = f − f (y) · 1 into this equation gives (δx ◦ T )( f ) −
(δx ◦ T )(1) · f (y) = 0, which is equivalent to (5.1).
5.2 The Graph Representation
Theorem 5.4 can be used to establish a representation of an order bounded disjointness preserving operator T on a Riesz space C (X ) in terms of a graph on X . We begin by defining some
terms from graph theory.
Let V be a set and let E be a set whose elements are ordered pairs of elements of V . The pair
G B (E ,V ) is called a directed graph or digraph. The elements of V are called vertices and the
elements of E are called edges. A weighted digraph is a graph along with a weight function w :
E → R. To simplify notation, we combine the edge set and the weight function into a weighted
edge set, denoted {(e, w(e))}e∈E .
A sequence v 0 , v 1 , . . . , v n of vertices is called a path in G if (v i −1 , v i ) ∈ E for every i ∈ {1, 2, . . . , n}.
If v 0 = v n and v i , v j for every other pair 0 ≤ i , j ≤ n, then the path is called a cycle. The length
of a cycle v 0 , v 1 , . . . , v n is defined to be n. When we refer to the set of cycle lengths of a graph, we
mean the set of numbers {c(x) : x ∈ C}, where C is defined to be the set of vertices of the graph
which are in some cycle.
5 DISJOINTNESS PRESERVING OPERATORS ON C(X)
25
Definition 5.5. Let X be a realcompact topological space and T a disjointness preserving operator on C (X ). Define X p to be the set of points in X for which δx ◦ T is not the zero functional,
and define the function τ : X p → X so that τ(x) is the unique y for which δx ◦ T = (δx ◦ T )(1)δ y .
Define the graph G associated with T to have vertex set X and weighted edge set
n³ ¡
´
o
¢
x, τ(x) , (δx ◦ T )(1) : x ∈ X p .
For x ∈ X , consider the sequence (τr (x))r ∈N , where it is understood that we stop if δτr (x) ◦ T is
ever zero (i.e., if τ(τr (x)) cannot meaningfully be defined). There are four possibilities for such
a sequence, which we will designate with lower case roman numerals:
(i) The sequence is eventually terminates at some τr (x). We will denote this r by λ(x), and
set λ(x) = ∞ for the remaining cases.
(ii) For some r , we have τr (x) = x. It is clear that the minimal such r is the cycle length c(x)
of the path from x to x in G.
(iii) The sequence never returns to x, but there do exist r, s ∈ N for which τr (x) = τs (x). This is
the case in which the path in G beginning at x feeds into τs (x)’s cycle.
(iv) For all r , s ∈ N, τr (x) , τs (x), i.e. the path never cycles.
Of course, we may compute powers of T from (5.1) in the natural way. We introduce the notation
Y
r
(T 1)(τi (x)) if r ≤ λ(x)
w r (x) = i =1
0
if r > λ(x)
for the product of the weights of the edges between x and τr (x).
Proposition 5.6. If T is an order bounded disjointness preserving operator on C (X ), and r ≥ 0
is an integer, then for all x ∈ X ,
½
f (τr (x))w r (x) if r ≤ λ(x)
r
(T f )(x) =
(5.2)
0
if r > λ(x)
Proof. Induction on r . The case r = 1 is equivalent to Theorem 5.4, so let r > 1, let x 0 ∈ X be
given. The induction hypothesis yields
½
f (τr −1 (x))w r −1 (x) if r − 1 ≤ λ(x)
r −1
(T
f )(x) =
0
if r − 1 > λ(x).
for all x ∈ X . We consider the cases r > λ(x 0 ) and r ≤ λ(x 0 ) separately. For r > λ(x 0 ), we calculate
(T r f )(x 0 ) = (T (T r −1 f ))(x 0 ) = (T 1)(x 0 )(T r −1 f )(τ(x 0 )) = 0,
where the last step follows from observing that λ(τ(x 0 )) = λ(x 0 ) − 1 and applying the induction
hypothesis to x B τ(x 0 ).
Similarly, if r ≤ λ(x 0 ), we obtain
(T r f )(x 0 ) = (T (T r −1 f ))(x 0 ) = (T 1)(x 0 )(T r −1 f )(τ(x 0 ))
= (T 1)(x 0 ) f (τr −1 (τ(x 0 )))w r −1 (τ(x 0 ))
= f (τr (x 0 ))w r (x 0 ),
where again we have used the observation λ(τ(x 0 )) = λ(x 0 ) − 1 to apply the induction hypothesis.
5 DISJOINTNESS PRESERVING OPERATORS ON C(X)
26
5.3 Powers of Algebraic Disjointness Preserving Operators on C(X)
Proposition 5.7. If X be a realcompact topological space and T is an algebraic order bounded
disjointness preserving operator on C (X ), then there are no vertices type (iv) in the graph associated with T .
Proof. Suppose that x is a type (iv) vertex. Use X ’s complete regularity to find a function f ∈
C (X ) which is 1 at τm (x) and 0 on {τr (x)}nr=m+1 . Then for m ≤ r ≤ n:
r
(T f )(x) =
½
w m (x) if r = m
0
if r > m,
which makes it impossible that p(T ) = 0.
Proposition 5.8. If X be a realcompact topological space and T is an algebraic order bounded
disjointness preserving operator on C (X ), then x ∉ X p ⇒ (T m f )(x) = 0, where m is the multiplicity of zero as a root of the minimal polynomial of T .
Proof. The proof is similar to that of 5.7. Suppose that x ∉ X p and (T m f )(x) , 0. The point
τm (x) is not in a cycle since x is not in a cycle. Thus
½
(T m f )(x) if r = m
r
(T f )(x) =
0
if r > m,
contradicting p(T ) = 0.
Theorem 5.9. Let X be a realcompact topological space, and let T be an algebraic order bounded
disjointness preserving operator on C (X ). Let m denote the multiplicity of zero as a root of the
minimal polynomial of T . If M ≥ m is any positive integer divisible by each of the cycle lengths
of the graph associated with T , then the restriction of T M to the range of T m is an orthomorphism.
Proof. Let the minimal polynomial of T be
p(T ) = T n + a n−1 T n−1 + · · · + a m T m = 0,
(5.3)
where a m , 0. Let G be the graph associated with T , and let X c contain the vertices x ∈ X for
which there exists a cycle in G from x to x. Notice that X c contains precisely the type (ii) vertices,
since reversal of edge directions in a digraph preserves the cycles. Furthermore, let X p consist
of all the vertices which are either type (ii) or type (iii). Explicitly,
X p = {x ∈ X : ∃ r ∈ N so that τr (x) ∈ X c }.
For each x ∈ X p , define µ(x) = min{r : τr (x) ∈ X c }. We claim that for all x ∈ X p , m ≥ µ(x). For if
m < µ(x), then use X ’s complete regularity to find a function f ∈ C (X ) which is 1 at τm (x) and 0
on {τr (x)}nr=m+1 . Then for m ≤ r ≤ n,
r
(T f )(x) =
½
w m (x) if r = m
0
if r > m,
5 DISJOINTNESS PRESERVING OPERATORS ON C(X)
27
which makes it impossible that p(T ) = 0. For each y ∈ X c , form the set A y = {x : τm (x) = y}.
S
Notice
that these sets are pairwise disjoint, and X p = y∈X c A y . If x and x 0 both have τm (x) =
¢
¡
τm x 0 = y ∈ X c , then T m f is constrained by the equalities
(T m f )(x) = f (τm (x))w m (x) = f (y)w m (x), and
¡ ¢
¡ ¢
¡ ¢
0
(T m f ) x 0 = f (x m
)w m x 0 = f (y)w m x 0 .
(5.4)
This observation leads us to define the family F of functions that obey (5.4) and the constraint
in Proposition 5.7.
¾
½
g (x)
g (x 0 )
0
for all x, x ∈ X p .
(5.5)
F = g : g (x) = 0 for all x ∉ X p and
=
w m (x) w m (x 0 )
We have already observed that if g is in the range of T m , then g ∈ F. On the other hand, if g ∈ F,
we can define f (y) by choosing some x with τm (x) = y, and then setting f (x) = g (x)/w m (x).
Then T m f = g , and we have shown that F equals the range of T m . It is easy to verify that F is a
vector subspace of C (X ) (though in general it is not necessarily a vector
¡ 0 ¢ sublattice). To see that
0
m
m
it is invariant under T , take f ∈ F and take x and x with τ (x) = τ x . Then
(T f )(x) f (τ(x))w 1 (x)
=
w m (x)
w m (x)
f (τ(x))w 1 (x)w 1 (τm (x))
=
w 1 (x)w m−1 (τ(x))w 1 (τm (x))
¡ ¡ ¢¢
f τ x 0 w 1 (τm (x))
=
w (τ (x 0 ))
¡ ¡ m0 ¢¢
¡ ¢
f τ x w1 x 0
=
w (x 0 ) w (τ (x 0 ))
¡ 1 ¢ 0 m
T f (x )
.
=
w m (x 0 )
¯
We will show that T M ¯F is an orthomorphism. Let f ⊥ g in F, and let x ∈ X p with g (x) , 0. We
want to show that (T M f )(x) = 0, which amounts to showing that f (τM (x)) is zero. Then if x ∈ X c ,
τM (x) = x because M divides all the cycle lengths, so f (τM (x)) = f (x) = 0 by the disjointness of
f and g . If x ∉ X c , then τM (x) is in the (−µ(x) mod c(τµ(x) (x)))th position in the cycle from
τµ(x) (x) to τµ(x) (x), and τm (x) is in the (m − µ(x)) mod c(τµ(x) (x))th position of the ¡same cycle.
¢
This implies that τM +m (x) = τm (x), which by (5.5) shows that g (τM (x)) , 0. Thus f τM (x) = 0,
again by the disjointness of f and g , so T |F is an orthomorphism.
The following corollary gives a bound dependent only on n and m. The asymptotic behavior of
this bound shows substantial improvement over the exponent n! in [4].
Corollary 5.10. If M ≥ m is a multiple of 1, 2, 3, . . ., and n −m, then T M restricted to the range of
T m is an orthomorphism.
Proof. Suppose that c(x) > n − m. Then take f ∈ C (X ) with f (τm (x)) = 1 and f (τr (x)) = 0 for
r = m + 1, m + 2, . . . , n. Then only one of {(T r f )(x) : m ≤ r ≤ n} is nonzero, in contradiction
with (5.3). Hence every cycle length is bounded above by n − m, so M is divisible by every cycle
length.
6 THE GENERAL CASE
28
The prime number theorem implies that the log of lcm{1, 2, . . . , n} is asymptotic to n [7]. Since
M ≤ lcm(1, 2, . . . , n), the log of M is (asymptotically) bounded above by n. This is an improvement over n!, whose log is asymptotic to n(log n − 1), by Stirling’s formula.
6 THE GENERAL CASE
We use the same approach employed in [4] to generalize Theorem 5.9 from C (X ) to arbitrary
Archimedean Riesz spaces.
Lemma 6.1. Let L be an Archimedean Riesz space and T an algebraic order bounded disjointness preserving operator on L. For all u ∈ L, there is a T -invariant principal order ideal of L
containing u.
Proof. Let p denote the minimal polynomial of T as in (5.3). Set e = |T n−1 (u)| + · · · + |T (u)| +
|u|, so that u ∈ L e . We claim that L e is also T -invariant. Let |x| ≤ e, and use Theorem 3.33 to
conclude that |T x| ≤ |Te| and that |T v| = |T |v|| for all v ∈ L. It follows that |T x| ≤ |T n (u)| + · · · +
|T (u)|. Furthermore, T n (u) = −a n−1 T n−1 (u) − · · · − a 1 T (u) − a 0 u, so |T x| ≤ (1 + max{|a k | : 1 ≤
k ≤ n − 1})e.
We also need the following representation theorem of Kakutani. We refer the reader to [11] for
a proof.
Theorem 6.2. Every M -space with strong order unit is lattice isomorphic to a Riesz space of the
form C (K ) for a compact Hausdorff space K .
Theorem 6.3. If T is an algebraic order bounded disjointness preserving operator on an Archimedean Riesz space L and M ≥ m is a multiple of 1, 2, . . . , n − m, then T M restricted to the range
of T m is an orthomorphism.
Proof. We need to show that for any u, v ∈ T m [L] with u ⊥ v, we have Tu ⊥ v. By Lemma 6.1,
can take a T -invariant principal ideal L e which contains |u|∨|v|, and hence both u and v. Then
L e is a normed vector space under the norm defined in Proposition 3.28, and the completion L̃ e
of L e is an M -space. We may extend T |L e to L̃ e by continuity ( T |L e is continuous since it’s linear). Denote this extension by T̃ . By Kakutani’s representation theorem, we can find a compact
Hausdorff K so that L̃ e is lattice isomorphic to C (K ). Also, the minimal polynomial of T is the
same as that of T̃ , since T is dense in T̃ . Denote by p 0 , n 0 and m 0 the minimal polynomial of T̃ ,
its degree, and its degree of zero as a root, respectively. The restriction of T to L e is annihilated
by p, and thus so is T̃ . Hence p 0 divides p. If we denote by k and l the (respectively) greatest and
least degrees of the nonvanishing terms in the quotient p/p 0 , then n = n 0 + k and m = m 0 + l .
Thus m 0 ≤ m and n 0 −m 0 ≤ n −m. Therefore, M is a multiple of 1, 2, . . . , n 0 −m 0 , and by Theorem
5.9, T̃ is an orthomorphism. Thus T |L e (being a restriction of T̃ ) is an orthomorphism as well,
and since u and v are both in L e , we have T M u ⊥ v, as desired.
29
7 SOME CONSEQUENCES
7 SOME CONSEQUENCES
If T is bijective, our construction of the range of T shows that X = X p . Under additional assumptions on X , Theorem 5.9 gives us a decomposition of a bijective T in terms of operators
corresponding to different cycle lengths. For this we need Frolík’s Theorem. We refer the reader
to [8] for a proof.
Theorem 7.1. (Frolík) If f is a bijective continuous mapping from an extremally disconnected
compact space K to itself, then there exists a decomposition {B i }3i =0 of X for which each B i is
closed and open, f is the identity on B 0 , and B i ∩ f [B i ] = ; for i = 1, 2, 3.
Proposition 7.2. The function τ : X p → X from Definition 5.5 is continuous.
Proof. Equation (5.1) implies that T f = (T 1) · f ◦ τ for all f ∈ C (X ). Since (T 1) is nonzero on X p ,
f ◦ τ is continuous for all f ∈ C (X ). By Theorem 2.8, τ is continuous.
Definition 7.3. A topological space X is said to be extremally disconnected if the closure of every
open set is open.
Theorem 7.4. Let X be a completely regular extremally disconnected compact Hausdorff space,
and let T be an algebraic bijective order bounded disjointness preserving operator on C (X )
whose minimal polynomial has degree n. Then each set X k = c ← [{k}] (for k = 1, 2, · · · , n) is
both open and closed, and for each k, B k = { f ∈ C (X ) : f = 0 on X \X k } is a band in C (X ) by
Proposition 3.26. Let K ⊂ {1, 2, . . . , n} consist of the indices for which X k is nonempty. Then
L
C (X ) = k∈K B k . Moreover, T is invariant on each band B k , T k is an orthomorphism on B k ,
and for all f ∈ C (X ) we have
X¡
_¡
¢
¢
(7.1)
T |B k f k ,
T |B k f k =
Tf =
k∈K
where f =
P
k∈K f k
k∈K
with f k ∈ B k for all k ∈ K .
Proof. By Frolík’s theorem, the set of fixed points of τ is an open and closed set. Also, τ is invariant on X /X 1 because if τ(x) ∈ X 1 , then τ(τ(x)) = x together with the injectiveness of τ yields
that τ(x) = x. For k = 2, 3, . . . , k, the set X k of fixed points of τk is an open and closed subset
of X /(X 1 ∪ X 2 ∪ · · · ∪ X k−1 ). Every x ∈ X is in some X k because c(x) is bounded above by the
degree of the minimal polynomial. Thus X is partitioned into open and closed sets {X k }nk=1 . By
Proposition 3.27, the set B k of functions vanishing off of X k is a band in C (X ). Observing that
L
B kd is i ,k B i , we obtain the band decomposition C (X ) = B 1 ⊕B 2 ⊕· · ·⊕B n . Theorem 5.9 implies
that T k is an orthomorphism on B k . Representation (7.1) follows from the linearity of T .
As another application of Theorem 5.9, we consider algebraic order bounded disjointness preserving operators on C (R). Consider the following theorem of Sharkovsky [12].
Theorem 7.5. (Sharkovsky) Define the Sharkovsky ordering on the natural numbers as follows.
3 ≺ 5 ≺ 7 ≺ 9 ≺ · · · ≺ 6 ≺ 10 ≺ 14 ≺ 18 ≺ · · · 12 ≺ 20 ≺ 28 ≺ · · · ≺ 16 ≺ 8 ≺ 4 ≺ 2 ≺ 1.
7 SOME CONSEQUENCES
30
Let τ : R → R be a continuous function. The period of x under τ is defined to be the minimum
k for which τk (x) = x. If there exists an element of R with period k, then for each k ≺ l in the
Sharkovsky ordering on the natural numbers, there exists an element of R with period l .
Theorem 7.6. If T is a bijective algebraic order bounded disjointness preserving operator on
p
C (R) for which T (1) = 1, then the minimal polynomial of T is of the form x 2 − 1 for some
nonnegative integer p.
Proof. Define τ as in Definition 5.5. The set of cycle lengths of elements of R of under τ cannot
include any number succeeded by infinitely many elements in the Sharkovsky ordering, since
by the algebraicity of T the set of cycle lengths must finite. Thus all cycle lengths are powers of
2. Define p so that 2p is the maximum of the set of cycle lengths. Since 2p is the least common
p
multiple of the cycle lengths, T 2 is an orthomorphism on C (R). Because T 1 = 1, this orthomorp
phism is the identity. Hence x 2 − 1 is an annihilating polynomial for T . Moreover, the degree
of the minimal polynomial of T is at least 2p since there is a cycle of length 2p in the graph
associated with T (see the proof of Corollary 5.10).
REFERENCES
REFERENCES
32
REFERENCES
[1] C. D. Aliprantis and O. Burkinshaw. Locally Solid Riesz Spaces with Applications to Economics. American Mathematical Society, Providence, RI, 2nd edition (2003).
[2] B. Bollobás. Linear Analysis: An Introductory Course. Cambridge University Press, Cambridge, 2nd edition (1990).
[3] K. Boulabiar. Recent Trends on Order Bounded Disjointness Preserving Operators. Irish
Math. Soc. Bulletin, 262, 43–69 (2008).
[4] K. Boulabiar, G. Buskes, and G. Sirotkin. Algebraic order bounded disjointness preserving
operators and strongly diagonal operators. Integral Equations Operator Theory, 54, 9–31
(2006).
[5] G. Buskes. The support of certain Riesz pseudonorms and the order-bound topology.
Rocky Mountain Journal of Mathematics, 18, 167–178 (1988).
[6] G. Buskes and A. van Rooij. Topological Spaces: From Distance to Neighborhood. Springer,
New York (1997).
[7] B. Farhi. Nontrivial lower bounds for the least common multiple of some finite sequences
of integers. Journal of Number Theory, 125, 393–411 (2007).
[8] Z. Frolík. Fixed Points of Maps of Extremally Disconnected Spaces and Complete Boolean
Algebras. Bull. Acad. Polon. Sci. Sér. Sci. Math. Astronom. Phys., 16, 269–275 (1968).
[9] L. Gillman and M. Jerison. Rings of Continuous Functions. Von Nostrand, Princeton, NJ
(1960).
[10] J. L. Kelley. General Topology. Springer-Verlag, Berlin (1985).
[11] P. Meyer-Nieberg. Banach Lattices. Springer-Verlag, New York (1991).
[12] P. D. Straffin. Periodic Points of Continuous Functions. Mathematics Magazine, 51(2), 99–
105 (1978).
33
REFERENCES
VITA
Sam Watson was born on January 13, 1986 in Memphis, Tennessee and grew up in Oxford, Mississippi. He graduated high school from the Mississippi School for Mathematics and Science.
In May 2008, he received a Bachelor of Science degree in Mathematics and Physics as well as
a Bachelor of Arts degree in Classics at the University of Mississippi. He is the recipient of the
Taylor medal, the Barry M. Goldwater Scholarship, the Gates Cambridge Scholarship, and the
National Science Foundation Graduate Research Fellowship.
 0
0
advertisement

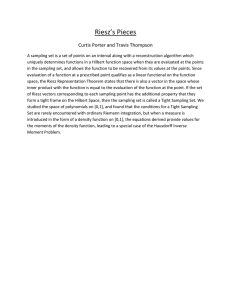



Download
advertisement
Add this document to collection(s)
You can add this document to your study collection(s)
Sign in Available only to authorized usersAdd this document to saved
You can add this document to your saved list
Sign in Available only to authorized users