-4
Reduced Basis Method for 2nd Order Wave Equation:
Application to One-Dimensional Seismic Problem
by
Tan Yong Kwang, Alex
B.Eng. Mechanical Engineering (2005)
National University of Singapore
Submitted to the School of Engineering
in partial fulfillment of the requirements for the degree of
Master of Science in Computation for Design and Optimization
at the
MASSACHUSETTS INSTITUTE OF TECHNOLOGY
September 2006
© Massachusetts Institute of Technology 2006. All rights reserved.
...
Author ........................
Certified by ........................
Accepted by .............................
OF TECHNX.OGY
...................
Anthony T. Patera
Ford Professor of Engineering
Professor of Mecla ical Engineering
hesis Supervisor
..
.........
Jaime Peraire
Professor of Aeronautics and Astronautics
Codirector, Computation for Design and Optimization
SEP 13 2006BARKER
LIBRARIES
.........................
School of Engineering
August 11, 2006
BRE
-1
2
Reduced Basis Method for 2nd Order Wave Equation:
Application to One-Dimensional Seismic Problem
by
Tan Yong Kwang, Alex
Submitted to the School of Engineering
on August 11, 2006, in partial fulfillment of the
requirements for the degree of
Master of Science in Computation for Design and Optimization
Abstract
In this thesis, we solve the 2nd order wave equation, which is hyperbolic and linear in
nature, to determine the pressure distribution for a one-dimensional seismic problem with
smooth initial pressure and rate of pressure change with time. With Dirichlet and Neumann
boundary conditions, the pressure distribution is solved for a total of 500 time steps, which
is slighter more than a periodic cycle. Our focus is on the dependence of the output, the
average surface pressure as it varies with time, on the system parameters M, which consist
of the earthquake source x, and the occurring time T.
The reduced basis method, the offline-online computational procedures and the associated
a posteriori error estimation are developed. We have shown that the reduced basis pressure
distribution is an accurate approximation to the finite element pressure distribution. The
greedy algorithm, the procedure of selecting the basis vectors which span the reduced basis
space, works reasonably well although a period of slow convergence is experienced: this is
because the finite element pressure distribution along the edges of the earthquake sourcetime space are fairly "unique" and cannot be accurately represented as a linear combination
of the existing basis vectors; hence, the greedy algorithm has to bring these "unique" finite
element pressure distribution into the reduced basis space individually, accounting for the
slow convergence rate. Lastly, applying the online stage instead of the finite element method
does not result in a reduction of computational cost: the dimension of the finite element space
K = 200 is comparable with the dimension of the reduced basis space N = 175; however,
when the two-dimensional model problem is run, the dimension of the finite element space
is ( = 3.98 x 104 while the dimension of the reduced basis space is N = 267 and the online
stage is around 62.2 times faster then the finite element method.
The proposition for the a posteriori error estimation developed shows that the maximum
effectivity, the maximum ratio of the error bound over the norm of the reduced basis error,
is of magnitude 0(103) and increases rapidly when the tolerance is lower. However, this
3
high value is due to the norm of the reduced basis error having a low value and hence
not a cause for concern. Furthermore, the ratio of the maximum error bound over the
maximum norm of the reduced basis error has a constant magnitude of only 0(102). Lastly,
the maximum output effectivity is significantly larger than the maximum effectivity of the
pressure distribution due to a conservative bound for the dual contribution.
The offline-online computational procedures work well in determining the reduced basis
pressure distribution. However, during the a posteriori error estimation, heavy canceling of
the various offline stage matrices results in small values for the square of the dual norm of the
residuals which decreases as the tolerance is lowered. When the tolerance is of magnitude
0(10-6), the square of the dual norm of the residuals is of magnitude 0(10-14) which is very
close to machine precision. Hence, precision error sets in and the offline-online computational
procedures break down.
Finally, the inverse problem works reasonably well, giving a "possibility region" of the
set of system parameters where the actual system parameters may reside. We note that at
least 9 time steps should be selected for observation to ensure that the rising and dropping
region of the output is detected. Lastly, the greater the measured field error, the larger the
"possibility region" we obtain.
Thesis Supervisor: Anthony T. Patera
Title: Ford Professor of Engineering
Professor of Mechanical Engineering
4
Acknowledgments
I would first like to thank my thesis advisor, Professor Anthony T. Patera, for his support
during my thesis work. I have had the most wonderful fortune of having his guidance and
counsel. I am truly grateful for his insights, trust and humor.
I am also very thankful to my colleagues: George Pau, Sugata Sen, Simone Deparis, Ngoc
Cuong Nguyen, Gianluigi Rozza, Sebastien Boyaval, Revanth Garlapati, Huynh Dinh Bao
Phuong and Vinh Tan Nguyen. I greatly appreciate the many helpful discussions and the
interesting time spent together. I am most grateful to Debra Blanchard for her invaluable
help and encouraging attitude throughout my thesis research.
I must also acknowledge the friends I found during my time at MIT: Yi Lin, Andrew, Jared,
Daniel, Laura, Jocelyn, Joy, Andy, John, Tony, Randy, Trevor, Yao Yu, Jia Yi, Shawn,
Matthew, Raymond, Shirley, Shu Chyng and Tan Bui.
Finally, above all I want to express my gratitude to my family, fellow classmates of the SMACE program as well as staff of the SMA and CDO offices. Without their support, funding
and encouragement, the 7 months in MIT would definitely be very boring.
5
6
Contents
1
2
3
15
Introduction
1.1
M otivation . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . .
15
1.2
Previous Work
. . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . .
16
1.3
Thesis Scope.
. . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . .
17
1.4
Thesis Outline.
. . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . .
17
19
Mathematical Model
2.1
Introduction . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . .
19
2.2
Governing Equation . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . .
20
2.3
Weak Form
. . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . .
22
2.4
Reference Domain Formulation
. . . .
. . . . . . . . . . . . . . . . . . . .
23
2.5
Semi-Discretization for Time Marching
. . . . . . . . . . . . . . . . . . . .
26
27
Finite Element Method
. . . . . . . . . . . . . . . . . . . . .
. . . . . . . . .
27
. . . . . . . .
. . . . . . . . .
30
3.3
Convergence Rate . . . . . . . . . . . . . . . . . . .
. . . . . . . . .
31
3.4
Results and Discussion . . . . . . . . . . . . . . . .
. . . . . . . . .
33
3.4.1
Pressure Distribution and Pressure Gradient
. . . . . . . . .
33
3.4.2
O utput . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . .
35
3.4.3
Smoothness of Pressure Distribution
. . . .
. . . . . . . . .
35
3.1
Triangulation
3.2
Truth and Reference Approximation
7
4
Reduced Basis Method
37
4.1
Formulation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
37
4.2
Offline-Online Computational Procedures .....
40
4.3
Selection of Basis Vectors: Greedy Algorithm
. . . . . . . . . . . . . . . . .
42
4.4
Convergence Rate . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
44
4.4.1
Maximum Norm of the Projection Error
. . . . . . . . . . . . . . . .
45
4.4.2
Maximum Norm of the Reduced Basis Error . . . . . . . . . . . . . .
47
4.4.3
Numerical Parameters
. . . . . . . . . . . .
47
. . . . . . . . . . . . . . . . .
48
4.5
5
A Posteriori Error Estimation
51
5.1
Motivation . . . . . . . . . . .
5.2
Formulation . . . . . . . . . .
52
5.2.1
Error Bound . . . . . .
52
5.2.2
Output Error Bound
61
5.3
5.4
6
Computational Cost
....................
. . . . . . . . . . . . . . . . . . . . .
51
Offline-Online Computational Procedures
63
5.3.1
Duality
. . . . . . . .
63
5.3.2
Linear Superposition .
65
Effectivity . . . . . . . . . . .
68
5.4.1
Convergence Rate . . .
70
5.4.2
Engineering Practise
74
5.4.3
Numerical Parameters
74
5.4.4
Direct and Linear Superposition Methods
. . . . . . . . . .
76
Inverse Problem
79
6.1
Formulation . . . . . . . . . . . . . . .
79
6.2
Results and Discussion . . . . . . . . .
82
6.2.1
Size of the Inverse Space . . . .
82
6.2.2
Total Number of Time Steps for Comparison
83
8
6.2.3
7
Measured Field Error.
. . . . . . . . . . . . . . . . . . . . . . . . . .
83
87
Conclusion
7.1
Summary
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
87
7.2
Future Work . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
89
7.2.1
Two-Dimensional Model Problem . . . . . . . . . . . . . . . . . . . .
89
7.2.2
Modifications to the Greedy Algorithm . . . . . . . . . . . . . . . . .
90
9
10
List of Figures
2-1
Step function h(x; M) (left), pulse function g(t; p) (center) and hat function
g'(t;[ ) (right) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2-2
Piecewise affine mapping F between the original x-domain Q,(x,) and standard y-dom ain Q. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3-1
Convergence analysis for dimension of the finite element space
K
24
(left) and
time step size At (right) at time t = 1.20 . . . . . . . . . . . . . . . . . . . .
3-2
21
32
Pressure distribution Pk(x,) and Pok(x,) during the interaction of the main
and reflected waves in the standard y-domain Q (left) and physical x-domain
Q,(x,) (right) respectively for earthquake source x, = 0.75 at time t = 1.66.
3-3
34
Pressure gradient Pk(x) and P,(x,) in the standard y-domain Q (left) and
physical x-domain Qo(x,) (right) respectively for earthquake source x, = 0.25
at time t = 5.00.
3-4
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Output Sk(x,) at occurring time T = 0.50 with varying earthquake source x,
(left) and earthquake source x, = 0.50 with varying occurring time T (right).
3-5
36
Pressure solution at some nodal y-position and time t (left) as well as some
nodal y-position and earthquake source x, (right). . . . . . . . . . . . . . . .
4-1
34
Convergence rate of maximum norm of the projection error er
space
Ztrain
test spaces
max
36
in training
as well as maximum norm of the reduced basis error jje||te,max in
Btest
(left) and the basis vectors selected by the greedy algorithm
(right). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
11
46
4-2
Norm of the projection error Ilek(X,)
in training space
Btrain
after selecting
the 43rd (left) and 137th (right) basis vectors. . . . . . . . . . . . . . . . . .
4-3
Convergence rate of the maximum norm of the projection error
training space
Btrain
in
for varying dimension of the finite element space .A (left)
and time step size At (right).
4-4
Iler|max
. . . . . . . . . . . . . . . . . . . . . . . . . .
(left) as well as maximum effectivity
AN,max
and maximum bound-maximum error ratio
rlS,N,max
(right) in test space Etest.
AS,N,max
(left) as well as maximum output effectivity
Btest.
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Norm of the reduced basis error Ilek(x,)
71k(x 8
) (right)
for the standard numerical parameters 0, except using a tolerance e
= 10-2.
(left) and effectivity
75
= 10-2.
75
At a particular ki time step, 6 different configurations between the output
bound gap S (y) and measured field error.
6-2
72
Reduced basis output error es(x8 ) (left) and output effectivity q,,N(xS) (right)
for the standard numerical parameters 0, except using a tolerance e
6-1
71
and maximum bound-maximum error output ratio S,N,max (right) in
test space
5-4
N,max
nN,max
Convergence rate of the maximum reduced basis output error eS,max and maximum output error bound
5-3
50
Convergence rate of the maximum norm of the reduced basis error ||e||te,max
and maximum error bound
5-2
48
Operation counts for online stage (left) and comparison of time taken between
the finite element method and online stage (right) . . . . . . . . . . . . . . .
5-1
47
. . . . . . . . . . . . . . . .
Reduced basis output S (p) and measured field error E
81
(left) as well as
"individual possibility region" Pi for different ki time steps (right) and the
"possibility region" P (bottom). . . . . . . . . . . . . . . . . . . . . . . . . .
6-3
"Possibility region" P when total number of time steps used for comparison
are KC = 4 (left) and KC = 9 (right).
6-4
84
. . . . . . . . . . . . . . . . . . . . . . .
"Possibility region" P when the measured field error
(right) of the reduced basis output S().
12
Ski
85
is 20% (left) and 40%
. . . . . . . . . . . . . . . . . . .
85
List of Tables
4.1
Dimension of the reduced basis space N with various numerical parameters
5.1
Error bound AkN(x,), norm of the reduced basis error Ilek(Xs)
N
#.
and effectivity
(x,) for earthquake source x, = 0.25 at the 170th basis vector from the
340th to 345th time step. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.2
49
73
Output error bound AN(8), reduced basis output error eS(x,) and output
effectivity r$,N(XI) for earthquake source x, = 0.75 at the 158th basis vector
from the 185th to 190th time step.
5.3
Maximum effectivity N,max and maximum bound-maximum error ratio
with various numerical parameters
5.4
Maximum output effectivity
output ratio
5.5
. . . . . . . . . . . . . . . . . . . . . . .
S,N,max
#.
'lS,N,max
73
N,max
. . . . . . . . . . . . . . . . . . . . . .
76
and maximum bound-maximum error
with various numerical parameters
. . . . . . . . . . .
77
Maximum norm of the reduced basis error j elltr,max and maximum error bound
difference
eA,max
for earthquake source x, = 0.50 as basis vectors ( are in-
creasing added. .........
..................................
13
78
14
Chapter 1
Introduction
1.1
Motivation
Engineering analysis requires the prediction of selected outputs from a system governed by
partial differential equations. These outputs are functions of system parameters that serve
to identify a particular configuration of the system. With increasing computational power,
many large and complex system of equations can be solved. However, solving these equations
usually requires high computational cost which is inflexible in system parameters estimation
(inverse problems) as well as adaptive design (optimization problems).
Hence the reduced basis method is a promising answer to the above situation. The reduced basis method explicitly recognizes and exploits the dimensional reduction afforded by
the low-dimensional solution. Furthermore, the system parameters-dependent partial differential equation can be expressed as the sum of several system parameters-dependent functions and system parameters-independent continuous form. This affine parametric structure
can be exploited to design effective offline-online computational procedures which willingly
accept greatly increased initial preprocessing expense (offline stage) in exchange for greatly
reduced marginal service cost (online stage).
15
1.2
Previous Work
The reduced basis method was first introduced in the late 1970s for nonlinear structural
analysis [1, 2] and subsequently abstracted [3, 4, 5, 6] as well as extended [7, 8, 9] to a
much larger class of parameterized partial differential equations. The underlying idea of the
reduced basis method, is to solve the partial differential equation for a sample of system
parameters with a fine finite element mesh. The reduced basis solution corresponding to
any other configuration within the system parameters domain is then expressed as a linear
combination of these finite element solutions. In another words, the finite element solutions
are the basis functions which span the reduced basis space. Clearly, in order for the reduced
basis method to perform efficiently, the finite element solution of the parameterized problem
should vary with the system parameters in a smooth fashion.
The reduced basis approach as earlier articulated is local in system parameters in both
practice and theory. Later work by Patera and co-workers [10, 11, 12, 13, 14], differs from
these earlier efforts in several important ways: first, global approximation spaces are developed; second, rigorous a posteriori error estimation are proposed; and third, offline-online
computational procedures are exploited. The a posteriori error estimation is developed to
ensure that the reduced basis solution and output are not unacceptably inaccurate compared
to the finite element method.
The reduced basis method has been applied to many elliptic [11] and also some parabolic
problems [12], both linear and non-linear in nature [13]. Rigorous a posteriori error estimation has also been developed [14].
Hyperbolic problems are more difficult because the
nature of the solutions involve propagation often with small support in space, possibly discontinuous solution, weak stability properties and hence are more complicated. However,
even linear hyperbolic problems are very important in many applications, like earthquake
prediction in seismology (inverse problems) as well as in system parameters design in room
acoustics (optimization problems).
16
1.3
Thesis Scope
In this thesis, the focus will be solving the 2nd order wave equation, which is hyperbolic and
linear in nature. We aim to determine the pressure distribution for a one-dimensional seismic
problem with smooth initial pressure and rate of pressure change with time. The reduced
basis method, the offline-online computational procedures and the associated a posteriori
error estimation are developed. Given a particular earthquake source and its occurring time,
the pressure distribution in space and time are determined.
The output required is the
surface pressure as it varies with time. Lastly, an inverse problem is performed, where from
the output, we determine the earthquake source and its occurring time.
1.4
Thesis Outline
In Chapter 2, using the weak form of the governing 2nd order wave equation, the mathematical model is formulated. In Chapter 3, a short overview of the finite element method is given
and the results as well as its convergence rate are discussed. In Chapter 4, the reduced basis
method and the offline-online computational procedures are developed. Furthermore, the
greedy algorithm for selecting basis vectors is proposed. In Chapter 5, the a posteriori error
estimation is developed and the corresponding error bound and effectivity are examined.
The inverse problem is explained and the results are summarized in Chapter 6. Finally, in
Chapter 7, the research is concluded with some suggestions for future work.
17
18
Chapter 2
Mathematical Model
2.1
Introduction
This year is the centennial anniversary of the San Francisco earthquake which occurred on
18 April 1906. This earthquake of 7.9 magnitude rattled much of the west coast and was felt
as far inland as Nevada. Some 3000 people died and at least 225,000 of the city's 400,000
residents were left homeless [15]. The Lawson report in 1908 remains the most important
study of this earthquake and marks the start of serious seismic research.
Modeling and simulations today play an important role in seismic research. The works of
Ghattas and co-workers, [16, 17, 18, 19], aim to develop the capability for predicting ground
motion of large basins during strong earthquakes and use this capability to study seismic
response of the Greater Los Angeles Basin. They have addressed several practical cases in
which their models are able to solve inverse problems accurately.
In this thesis, we examine a simplified one-dimensional seismic model, modified from the
complex three-dimensional high resolution basin model undergoing seismic motion performed
in [19]. We solve this one-dimensional seismic problem to determine the surface pressure as
it varies with time, given the earthquake source x, as well as its occurring time T.
19
2.2
Governing Equation
When an earthquake occurs, the pressure variation of the earth crust is governed by the 2nd
order wave equation,
(2.1)
Po,t(x, t; p) - KPjex(x, t; /) = h(x; p)g(t; p),
where Pg(x, t; /t) is the exact pressure distribution and
i
is the wave propagation speed.
The system parameters p are the earthquake source x, and the occurring time T. We shall
permit the system parameters MA
{xs, T} to vary within the system parameters domain
D = [0.25, 0.75] x [0.25, 0.75] c R 2
From figure (2-1), the step function h(x; /t) and pulse function g(t; M) characterize the
spatial and temporal region of the earthquake source x, respectively. Both are normalized
such that each of their integrals have a value of 1, giving
j
ho = 5,
h(x; M) dx = 1
Io1
g(t; t) dt = 1
go = to ,
where to is the raise time. The equations of the pulse function g(t; p) are
t< T
T < t < T + to
2
T + 1to < t < T +
-2
2
T+
2
g(t; /)
=
g(t; P)
=
2g 0 t (t-
T 2
: 2 go (t - T -to)2
to
to ; t < T + 2to
;
t > T+2to
0,
g(t;A)
g(t;p/)=0
20
(t - T - 2to) 2
=
,
1
t
,
(2.2)
h(x;p)
g(t;p)
g'(t;p)
2go----------
go- ------------
h ----------
,
t0
T+2to
2
0
x,-0.1
Pt
x
-
x.+0.1
1
T
0
to*
0
T
T+to
- ~~~----~~
-
t
T+to T+2to
Figure 2-1: Step function h(x; [) (left), pulse function g(t; [)
(center) and hat function
g'(t; t)(right).
and they are obtained based on its derivative, the hat function g'(t; IL), also shown in figure
(2-1). Time is also normalized such that time t = 4.1 corresponds to a periodic cycle of
the pressure distribution. The 2nd order wave equation is then normalized, giving the wave
propagation speed r,a value of 1 and the whole spatial domain is normalized to unit length,
Qo(xs) = [0, 1].
The occurring time T will shift the pressure distribution Pe(x, t; P) forward or backward
in time and only play a role during the inverse problem. Thus, for simplicity, it is fixed as
0.50. Hence, the governing equation simplifies to
P,,tt(x,t; xs)
-
P;,(x,t; x,) = h(x; x,)g(t).
(2.3)
The boundary conditions are such that the pressure is zero deep in the earth's crust Pe(x =
0, t; X,) = 0 while the pressure gradient is zero on the earth's surface Pj,(x = 1, t; X,) = 0.
The pressure distribution is marched forward in time with zero initial pressure and rate of
pressure change with time Pe(x, t = 0; x,)
=
Pet(x, t = 0; x,) = 0, throughout the spatial
domain Q0 (x,). Our focus shall be on the dependence of the output,
S1(t; X,) =
jP
(x, t; X,) dx,
the average surface pressure as it varies with time, on the earthquake source x,.
21
(2.4)
2.3
Weak Form
Equation (2.3) is the strong form of the governing equation. The point of departure of the
finite element method is the transformation of equation (2.3) to its weak form. The strong
form is multiplied by a test function v and then integrated in the spatial domain Qo(x,). The
1
exact pressure distribution Pg(x,) E Xe (x,) ={v E H (Qo(x,)) I
Jo
(X')
vP tt(x, t; x )
-
J
",S)
vP
(x,Poe,=
t;
x) =
t; X')
(X
VjFD =
0}
thus satisfies
vh(x; x,)g(t),
1
V v E X,(x,). The integrals are further simplified using integration by parts and the divergence theorem,
fo(xs)
vP O't(x, t; i 8 ) - [vP (x, t; x )]
+
J
v P x(x, t; x')
=
j
vh(x; x,)g(t).
Imposing the boundary conditions results in the weak statement,
m(Po',(x,),v;xs)+a(PF (x,),v;xs) = g(t)h(v)
where V w,
E X
V
v E X*(x,),
(2.5)
88(x),
m(w, v; X)
vw,
(2.6)
vxwx,
(2.7)
fo(Xs)
a(w, v; x,)
iio(Xs)
and V v E Xe(x,),
22
h(v) =
)
0"(Xs)
vh(x;
x,).
v
(2.8)
m(w, v; x,) and a(w, v; x,) are the mass and stiffness functions respectively which are both
symmetric positive definite and bilinear while h(v) is the load function which is linear.
Our output is then evaluated as
(Poe(xs)))
S."(t; XS)
(2.9)
where V v E X0(x 8 ),
1
1.0
0.1 Jo. 9
(2.10)
Here i(v) is the output function which is linear.
2.4
Reference Domain Formulation
It is important to note that the spatial domain Qo(x,) is a function of the earthquake source
X,. We decompose this original x-domain Qo(x,) into
Q0 (C2)
=
Qo(X,) U
1 (X,) U Q1(X,) U 2 (X,),
(2.11)
where left zone Q1(x,) - [0.0, x, - 0.1], forcing zone Q'2(x,) = [x, - 0.1, x, + 0.1], right zone
Q3(X)
- [x, + 0.1, 0.9] and output zone Q4(X,) - [0.9, 1.0]. We next introduce the reference
domain shown in figure (2-2). Similarly, we decompose this standard y-domain Q as
23
Left zone,
Forcing
zone,
01
Right zone,
Output
zone,
03
n2
0.4
0
1.0
0.9
xS + 0.1
xs - 0.1
0
4
0.9
0.6
1.0
Figure 2-2: Piecewise affine mapping F between the original x-domain Q,(x,) and standard
y-domain Q.
0 = (21 U (22 U (U
where left zone Q1 = [0.0,0.4], forcing zone
output zone
Q4
Q2
(2.12)
04,)
[0.4,0.6], right zone Q' =- [0.6, 0.9] and
[0.9, 1.0].
We now consider a piecewise affine mapping F from the standard y-domain Q to the
1
original x-domain Q,(x,): the mapping is x = 2.5x y from Q to Q'(x,); the mapping is
x
y + x,
-
0.4 from Q2 to Q2 (X'); the mapping is x
=
1(0.7 - xS)y + 3x, - 1.2 from
4
Q3 to Q3(XS); and the mapping is the identity from Q to Q4(X 5 ).
distribution Pg(x, t; x)
Our exact pressure
in the original x-domain Qo(x,) can then be expressed in terms of
the exact pressure distribution Pe(y, t; x,) in the standard y-domain Q as Pf(x, t; x)
=
Pe (F-l(x), t; X').
Therefore, the exact pressure distribution Pe(y, t; x,) E Xe
-
{v E H 1 (Q) I
VIrD =
0}
in the standard y-domain Q satisfies
m(PFe(x,), v; x) + a(pe(X8 ), v; X8 ) =
where
24
g(t)h(v)
V
v E Xe,
(2.13)
mn(P (x,,), v; .e) =
2.5x,
J1
vP (y, t; X') +
+ 1(0.7 -
a(Pe(x,), v; xs) =
2.5xs
1vYPY(y,
12 vFP(y, t; X)
vP(y, t; X) +
s)
t;X') + 122VY PY(y,
+
t;
4vPt't(y,
xS)
VY PY (y, t; xs)
VY PY (y, t; X') +
10(0.7
- X,) JQ3
h(v)
(2.15)
1
jvh(y).
=
t;-X) , (2.14)
(2.16)
The output is then evaluated in terms of Pe(y, t; x,) as
SC(t; X')
= e(pe(X,))
(2.17)
where
i(Pe(xs))
101
=
Pe(X').
(2.18)
Hence, the weak form of equation (2.13) is a sum of Qm= Qa = 4 products of system
parameters-dependent functions and system parameters-independent continuous forms,
25
QrnI
m(Pt(xS), v; XS)
=
>3
(x)mo(P3(xS),v),
(2.19)
(x,)a(Pe(x,),v),
(2.20)
q=1
Qa
a(Pe(x,), v; x,)
= >
q=1
where the coefficients are the system parameters-dependent functions
e%(x,) and
a1(x 8 )
while the integrals are the system parameters-independent continuous forms mq(Pe(x,), v)
and aq(Pe(x,), v).
2.5
Semi-Discretization for Time Marching
To march the pressure distribution in time, the Newmark scheme, which is unconditionally
stable is applied. The weak form of equation (2.13) and output of equation (2.17) become
' pe'k
( (X,) - 2Perk-1 (XS) +
(t2
Pe,k-2
zS
,
ay2
k-2
k
.
Se'k(XS)
+ Pe,k-2
()
(X)e,k
;
g
2
I(v)
V
v
X,
(2.22)
j(pe'k(X)),
=
where the pressure distribution for the zero and first time steps are zero, Pe O(x 8 ) =
(2.21)
pel
(x,)
=
0, giving a zero initial rate of pressure change with time to the first order. We are assuming
that the time step size used is sufficiently small such that at each time step, the pressure
distribution and output is essentially indistinguishable from the exact pressure distribution
and output. Furthermore, this scheme has a particular conservation property which will be
useful in the development of the a posteriori error estimation.
26
Chapter 3
Finite Element Method
3.1
Triangulation
In general, we can not find the exact pressure distribution. Hence we solve the weak statement of equation (2.21) using the Galerkin approach. Triangulation
Th
is performed on the
standard y-domain Q. With n triangles Th, we define a "truth" P 1 finite element approximation space X(= Xh)
c Xe {V E Xe I
vITh E P1(Th),
V Th E
Th}.
This finite element space
X is a sufficiently rich approximation subspace such that the different between the exact and
finite element pressure distribution is sufficiently small for all system parameters P in the
system parameters domain D. Hence the dimension of the finite element space M is typically
very large; our formulation must be both stable and efficient as
K
-+ oc. Given that our
boundary conditions are Dirichlet and Neumann at each ends of the standard y-domain Q,
with n elements, the dimension of the finite element space A( is simply n.
Pk(x,) E X is denoted as the fully discrete finite element approximation at time
tk -
kAt,
where At is the time step size. From the second time step to the total number of time steps
K, a linear system of equations is inverted to obtain the finite element pressure distribution
Pk(x,) and output Sk(x,).
The finite element pressure distribution Pk(X8 ) is obtained by
solving
27
m
Pk(xS) - 2pk-1(x2 8 ) + Pk-2 (X)
,v; x,
SAt
)
+ a(Pk(Xs) +
k2Xs.IviX8)
p
k
k-g2
2
Ih(v),
(3.1)
V v G X while the output is evaluated in term of Pk(x,) as
(3.2)
Sk(xs) = e(Pk(xs)).
In terms of our basis functions, which are unit hat functions y , the finite element pressure
distribution Pk(x8 ) and the test function v are represented as
n
pk(Xs)
P
j=
,
v
=
Zvn=
(3.3)
(33
2.
1
The nodal coefficients P (x,) then satisfies
m
n=1
P (x 8
>p
j - 2 E '=1 p
c-(X s) O +
At
+a(
E
=I
pk-2(X
F(Xs>.Pj +Z>
2
1 pk- 2
~Xs(
j pj=
,.=l
~~
,
i=
n
,)
2
vpi2 ; x 8)
,
vi i;
-
kg
k-2
=2
and making use of the bilinear and linear properties of the various functions, are further
simplified into
28
P. (xs) - 2Pj'-(x,) + P -2
i=1 j=1
+ ZEv
i=1 j=1
[
_2
) + pk-2(X)
a(oj, i; x.) Pj (x 8
2
i~
2
s)
In matrix form and dropping the test function v, the above equation becomes
M(x8 )
pk(x)
-
2
pk-1 (x,) +
At
k
Pk-2 (X)
2
+ A(x8 )
k-2(
k-2
k _
2
2
H,
where M(x,) is the mass matrix, A(x,) is the stiffness matrix and H is the load vector.
Finally, grouping the present time step k and the previous time steps k - 1 and k - 2
separately, the nodal coefficients Pf(x,) are solved from
M~s
{At
1
2
IA
(x ) Pk(X ) =
M(xs)
[2Pk-1(X)
--
2
- Pk-2
A(x)Pk- 2 (x) +
9
k +
-2H
2
.H
(3.4)
The output of equation (3.2) can subsequently be evaluated as
=n
P kx s)O
Sk(xs)
j=1
=
(xs'M Oj)
j=1
=
Pk(X)T L
where L is the output vector.
29
(3.5)
The various elemental matrices and vectors are of constant values,
2 1
,
6 [1 2]
h
A
Mh=-
-i
1
h[
=5h
,
2
L
1
h
2
and stamped accordingly into
QM
M(x,)
3
=
m(pj, pi; x,) =
Eq(x,)mq(pO,
(3.6)
Oi),
q=1
Qa
A(xs)ij
a( oj, oj; x.)
(3.7)
= L()q(x,)a q((Pj, Oi),
q=1
(3.8)
Hi =I(ps)
Lj=
3.2
e(pj).
(3.9)
Truth and Reference Approximation
The dimension of the finite element space
K
and the time step size At depend on the
convergence of the finite element pressure distribution Pk(x,) as well as the output Sk(x,).
These 2 parameters thus form the numerical parameters
#3
{=- , At}. It is important that
their values enable the finite element pressure distribution Pk(xs) as well as the output
Sk(xs) to approximate the "truth" pressure distribution PT'k(xs) and the output ST7k(x)
accurately. The standard numerical parameters 0, is the numerical parameters
#
that is
taken to give the "truth" pressure distribution pT'k(x,) and output ST'k(x). It is upon this
"truth" finite element approximation that we shall develop our reduced basis method and a
posteriori error estimation.
In order to determine the standard numerical parameters 0, the convergence rate of the
finite element method is examined in the next section with respect to the reference numerical
parameters
#,.
The reference numerical parameters
30
#,
is the numerical parameters
#
that
have the largest possible dimension of the finite element space A and smallest possible time
step size At.
3.3
Convergence Rate
Other than the system parameters y and numerical parameters
#, there
are other parameters,
namely the total time Trt, and the rise time to. The total time Trt~ is taken to be 5 since the
pressure distribution Pk(x,) repeats itself in a period of 4.1. The raise time to is taken as
0.15, estimating that after this time, the earthquake will have fully occurs (t = T + 2to) and
hence any reflection of the wave will not cause any interference.
Equations (3.4) and (3.5) are solved with the dimension of the finite element space
K
ranging from 5.0 x 101 to 1.6 x 103 and the time step size At from 2.00 x 102 to 1.25 x 10-3.
The earthquake source x, has values of 0.25, 0.50 and 0.75. We now introduce the inner
product (-,-)
(-,
)x,
(3.10)
(w, v) = a(w, v; x, = 0.50),
and the associated norm
II
x,
W
(3.11)
V/-(w, W).
x, = 0.50 is selected as the inner product because this value corresponds to identity mapping
across the entire physical x-domain Q,(x,) and standard y-domain Q.
The numerical parameters
erence numerical parameters
#
#r
= {K = 1.6 x 103, At = 1.25 x 10-3} are taken to be the refwhich give the "reference" pressure distribution pk(x,) as
well as the output Srk(x,). Hence, the finite element error ef(x ) = Pk(X,)
31
-
prk(X,) is the
100
temporal convergence rate at time = 1.20
at time = 1.20
spatial convergence rate
10 0
-20
.~2
10.75
10
0 -. x-=22
1
00
Q =1
2.88--
F:rt
F:
'~~
00
10724
1
0.5(F):rate=1.077
-.-x x == 0.25 (F): rate =1.077
.0
S:rt
rate =1.075
2.088 --. x.= 0.50 (F):
0
02.411
-4=02
0--
-
-
--
-s=05
ae=105-
--
-.
-
1
x
.2
x,=
.5
F:rt
.7
(F:rt=2.9
x = 0.25 (F): rate =2.072
.0
S:rt
rate = 2.090
x,,=02
= 0.50 (F):
E
E
D
x = 0.75 (S): rate = 2.088
-10
10
102
element length
10
A
-
2
x. = 0.75 (S): rate = 2.411
10
10
time step size
100
10
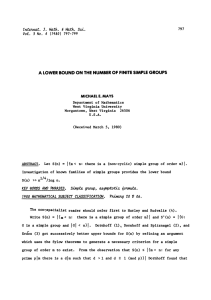
Figure 3-1: Convergence analysis for dimension of the finite element space K (left) and time
step size At (right) at time t = 1.20.
difference between the finite element pressure distribution pk(x,) using a particular numerical parameters
#
and the "reference" pressure distribution prk(X,) with the corresponding
norm as
(3.12)
||ef(xS) = I|Pk(xs) - P'k(Xs) 1.
Similarly, the finite element output error es,f(xS) = ISk(xs)
-
Sr'k(x,)I is the absolute dif-
ference between the finite element output Sk(x,) using a particular numerical parameters
#
and the "reference" output Sr'k(X,).
Since the discretization in space and time are both of second order, we will expect first
order convergence in space and second order convergence in time for the norm of the finite
2
element error IIef(x,) 1. But the finite element output Sk(X,) is a L functional; hence we
will expect both the spatial and temporal convergence rate to be of second order. From
figure (3-1), results show that increasing the dimension of the finite element space K and
shrinking the time step size At cause the norm of the finite element error Ilef (x) 11as well as
the finite element output error es,f(xS) to converge at roughly the expected convergence rate.
32
Since the output function is not compliance, there is no theory that link the convergence rate
of the finite element output error e,,f(x 8 ) to the norm of the finite element error ||ef(x,)|f.
The convergence rate of the finite element output error e,,f(xs) is higher at earthquake
source x, = 0.75 may be because it so happen that the finite element output Sk(x,) at that
particular time step is much nearer to the "reference" output S'k(XS).
As the finite element output Sk(X8 ) using the dimension of the finite element space
K
=
200 and time step size At = 0.01 are close to the "reference" output ST'k(x,), the standard
numerical parameters are fixed as Os = {JV = 200, At = 0.01}. Therefore, the finite element
pressure distribution Pk(x,) and output Sk(Xs) using the standard numerical parameters
0, are presumed to be essentially indistinguishable from the "truth" pressure distribution
PT'k(x,) and output ST'k(X ).
8
3.4
3.4.1
Results and Discussion
Pressure Distribution and Pressure Gradient
The pressure distribution Pk(xS) and pressure gradient Pk(x,) are solved in the standard
y-domain Q and mapped back to the physical x-domain Q,(x,). From figures (3-2) and (3-3),
we observed that in the standard y-domain Q, the pressure distribution Pk(X8 ) is smooth
inside each of the 4 zones but not across zones. This is due to the affine mapping performed
and results in discontinuities in the pressure gradient Pk(xs) across the zones. After mapping
to the physical x-domain Q,(x,), the pressure distribution P0(x.) is now smooth within and
across the 4 zones with no discontinuities in the pressure gradient Pk.(x8 ).
It is observed that after the earthquake occurs, the pressure wave moves in 2 directions:
the main wave moves towards the Neumann boundary (y = 1) and back while the reflected
wave moves towards the Dirichlet boundary (y = 0) and get reflected. The location where the
reflected and main waves interact depends on the earthquake source x,. When earthquake
source x, = 0.75, the reflected wave travels a longer distance before reflecting. By that time,
33
earthquake source
=0.75;
earthquake
time =1.66
-.- . . .
0.5 ...
-..CL
source =
0.75;
time = 1.66
1
1
-..
-..
-..
..
....
- .... ......................
0.5
.-..-.--.
0)
0
0
(A,
0.
-0.5
-0.5
-1
-1
0
0.2
0.4
-10
0
1
0.8
0.6
0.2
position along y-axis
0.6
0.4
0.8
1
position along x-axis
Figure 3-2: Pressure distribution Pk(x,) and Pk(x,) during the interaction of the main
and reflected waves in the standard y-domain Q (left) and physical x-domain Qo(x,) (right)
respectively for earthquake source x, = 0.75 at time t = 1.66.
earthquake source = 0.25; time = 5.00
earthquake source = 0.25; time = 5.00
8
8
6
6
4
4
- ....... ........
..
.-..
52
0
-2
-
.....
-.
-....
--.. - - ...
-.
....
0
.....
-.
--.
.........
-.
...
-.. - ...
---
-4
. -.-....
- ...
-
-6
....................
..........
.....-
-6
.
. -..
-..
--
-.-
- - --
....
......................... ..
.
.
..---..
...
-..
0.2
0.4
0.6
0.8
0
1
position along y-axis
---..
--..
......
..
...-..
-8
-8,
0
.....
-2
--.- -
.
.-
...- .
5 2
----....- --.......
-.....
. .
---.
-4
-.
.......... ... .........
C
0.2
0.4
0.6
0.8
1
position along x-axis
Figure 3-3: Pressure gradient P (x,) and Pck (x,) in the standard y-domain Q (left) and
physical x-domain Qo(x,) (right) respectively for earthquake source x, = 0.25 at time t
5.00.
34
=
the main wave has already traveled back and is nearer to the Dirichlet boundary. Hence the
interaction occurs near the Dirichlet boundary. For earthquake source x, = 0.25, it is the
other way round. Similar observations in the standard y-domain Q regarding this interaction
between the reflected and the main waves are also noted in the physical x-domain Q,(x,).
3.4.2
Output
At the same time, while the main wave is moving back, the pressure distribution Pk(x,) near
the surface (y = 1) experiences an interval of constant pressure. This results in the output
Sk(x,) having a plateau at its peak and trough, as seen in figure (3-4). However, there is no
difference between the physical x-domain Q,(x,) or the standard y-domain Q since identity
mapping is performed in the output zone
Q4.
Furthermore, in order for the inverse problem to work, the output Sk(X,) must be distinct
for different system parameters /i.
The output Sk (X8 ) is determined for different system
parameters M, in interval of 0.05 within the system parameters domain D. From figure (3-4),
as the earthquake source x, increases, the plateau at the peak and trough lengthen while
the time interval between the peak and trough shorten.
As mentioned earlier, when the
occurring time T increases, the output Sk(X8 ) shifts itself to the right.
3.4.3
Smoothness of Pressure Distribution
Lastly, the development of the reduced basis method requires the pressure distribution Pk(X
8 )
to be fairly smooth in both the spatial and temporal domain. 12 random samples at different
nodal y-position, time t and earthquake source x. are picked for comparison. From figure
(3-5), the pressure variation with respect to both the earthquake source x, and time t are
fairly smooth. This mean that the reduced basis method may perform efficiently.
35
output vs time
output vs time
5.
0-
- .
-..
....
-..
..... -.-.
- -.
- .
0.5
1
0.5
0.
-.
......
0
0
0
0.25
= 0.50
-..... ... ....
..
- .. ..
=
-0.5- -x
.
x
-
x_ =
-1
0
-0.5
__T
0.75
2
1
time
0
5
4
3
T=0.25
T=0.50
- T = 0.75
2
1
time
3
4
5
Figure 3-4: Output Sk(x,) at occurring time T = 0.50 with varying earthquake source x,
(left) and earthquake source x, = 0.50 with varying occurring time T (right).
pressure vs time
pressure vs earthquake source
-
1.5
-
0.5
y = 0.86 and t = 5.00
1
C,,
CL,
y = 0.30 and t = 4.07
y = 0.78 and t = 1.30
y=0.05 and t= 2.11
y = 0.63 and t = 0.79
0
0.5
0
_
-_y = 0.11 and x = 0.25
.1.5- --
-0.5
0.3
0.4
0.5
0.6
0
0.7
earthquake source
y = 0.50 and xS = 0.43
y= 0.97 and x = 0.31
1
0
-1
-0 .5- -
y = 0.24 and x = 0.68
y = 0.37 and xS = 0.39
1
2
time
3
4
5
Figure 3-5: Pressure solution at some nodal y-position and time t (left) as well as some nodal
y-position and earthquake source x, (right).
36
Chapter 4
Reduced Basis Method
4.1
Formulation
In general, the dimension of the finite element space .A will be quite large in order to achieve
the desired "truth" accuracy and thus solving equations (3.4) and (3.5) can be simply too
expensive in real-time context.
The reduced basis method makes use of the dimensional
reduction due to the low dimensional and parameterically induced solution. We first define
the reduced basis space WN (of dimension N) as the span of N finite element pressure
distribution {pki (Xs), .., pkN
p
WN
=
(XSN
)}
span{ pk1(X")....
selected within the training space
3
pkN
xain
train =
(XSN)
:
an earthquake source-time space
containing 7 different values of the earthquake source x, and all time steps.
However, as the dimension of the reduced basis space N increases, the conditioning of
the reduced mass and stiffness matrices will increase.
accuracy of the reduced basis method.
{ pki (X),
..., PkN (XSN)
This ill-conditioning will affect the
Thus, the N finite element pressure distribution
are orthogonalized to obtain
37
WN
These basis vectors {(1...
, N
= span{(1, .
(4.1)
4
(N.-
are obtained using the modified Gram-Schmidt orthogonal-
ization. We first set
{Zl,
Then for i =1,.
..
{pk (Xsl), ... ,
.. ., ZN
(4.2)
(XSN)}.
pkN
, N,
(4.3)
zi
zi41
and at the same time, for j = i + 1, ... , N,
(4.4)
z' = Z' - ((,z ) (.
The reduced basis pressure distribution PN(x 8 ) E WN
c X is then given by simple
Galerkin projection,
m (P
(
-
2PF-
1
(xs) + PN-2)
At
2
2
V; x
) + a (( P NX(x) +2 p k
(x)
, V; X8
k
g +g
2
V v E WN while the reduced basis output is evaluated as
38
k-2
(v),
(4.5)
Sfy (Xs)
(4.6)
= ((PN()S)).6
The reduced basis pressure distribution Pk(X,) and test function v are now expressed as
N
Pk (XS)
where PEN,(x
{
+
j==1 - Nj
It then follows that the
satisfy the algebraic equation
(s)
2E=
s
(4.7)
N,i i,
=
kj(s)(j,
j=1
j=1
j < N, are the reduced basis coefficients.
, 1
reduced basis coefficients
M+
N
1 pk-l(X)
(X)
j + EN1= 1 F7
N
A2
vN,4i;s )
, E
i=1
EN=1
j= - Nk,j (Xs)
(
N
+ 1 pN (Xs8 )(
VN,i i
i=1
Xs
~
}
k +
N
k-2
+2
VN,i(i )
h
and again making use of the bilinear and linear of the various functions, are further simplified
into
N
{
i=1
N1
Ak~(s
EEVN,i M((j, (i; XS)
-N (
-
2PkN(X
At
8
) +Npk-2
2
j=1
N
+
N
E
vN,ia((j, j; xs)
ENE
j (XS) +P
i=1 j=1
-2( )
I
}
In matrix form and dropping the coefficient of the test function
becomes
39
k-2
_k _
2
VN,
N
VN,i h(i)-
the above equation
2
1
(XS)
(Xs) +±p7
2pk-7
Rk (x,) MN (X,)
N
-2
2 (X )
+±EkP(X,)
k
8
(X, N )N
+
_gk+gk-
2
-N
N
where MN (Xs) is the reduced mass matrix, AN (Xs) is the reduced stiffness matrix and HN
is the reduced load vector. Finally, grouping the present time step k and the previous time
steps k - 1 and k - 2 separately, the reduced basis coefficients FN (x)
{
1
-tMN (X,)
2
AN(Xs) }
s
{t
2
MN (Xs)
S2pk-
1
(xs)
are solved from
]
-Pk-2(
S k 2k2
AN
-
)
k-2(X)
2
N
(4-8)
The reduced basis output SN(xs) can then be evaluated as
N
S k(XS)
j=1
N
j=1
=
PT(XS) LN,
where LN is the reduced output vector.
4.2
Offline-Online Computational Procedures
The affine parametric structure of
40
(4.9)
Qrn1
m((j, i, XS) = E
MN(s~j
) XS M (,()
(4.10)
q=1
Qa
AN(Xs)ij
=
a(j,
8s )=
~sr eq(x,)aq((4
q=1
HN,i
=
h(Q,
(4.12)
LNJ
=
i(Q,
(4.13)
can now be exploited to design effective offline-online computational procedures.
In the offline stage, the basis vectors {(1, ...
(4.3) and (4.4). Next, mq((j, j), aq((j,
i, j
N, 1 < q
Qm, Qa.
, (NJ
are first solved from equations (4.2),
I(() and i((j) are formed and stored for 1 <
h(),
In the online stage, for each new value of the earthquake source
XS, the reduced mass matrix MN(xs) and the reduced stiffness matrix AN(xs) are first
assembled from equations (4.10) and (4.11). Next, the left-hand-side matrix and the righthand-side vector of equation (4.8) are formed. This system of equations is subsequently
inverted to yield the reduced basis coefficients PN(XS) which is substituted into equation
(4.9) to produce the reduced basis output S~k(xs). If required, the reduced basis pressure
distribution PN(Xs) can be obtained by substituting the reduced basis coefficients PN(Xs)
into equation (4.7).
It is important to note that the offline stage is performed only once and all quantities
computed are independent of the earthquake source x,. Generally, the online stage is performed many times for different values of the earthquake source xs. Since the online stage
is essentially independent of the dimension of the finite element space Af which is large but
rather dependent on the dimension of the reduced basis space N which is much smaller
N < A, significant reduction in computational cost is often expected.
41
4.3
Selection of Basis Vectors: Greedy Algorithm
Before introducing the greedy algorithm for selecting the N basis vectors {fpki (x81 ),.
pkN
(XsN
, several errors and their corresponding norms are first defined. The reduced basis
error ek(xs)
-
Pk(x,) - PN(xs) is defined as the difference between the finite element Pk(x,)
and reduced basis PN(x8 ) pressure distribution with the corresponding norm as
Iek(Xs)
F|pk(Xs) - pk X)||.
=
(4.14)
The maximum norm of the reduced basis error in the training space Etrain,
||e||tmax =
x
max
Ilek(x,) I,
(4.15)
XSE-traintkEEtrain
is then the maximum value of the norm of the reduced basis error Ilek(x,)
training space
Btrain.
throughout the
Similarly, the maximum norm of the reduced basis error in the test
space Etest,
I Iete,max
=
max
leek(xs) ,
(4.16)
osEtestekE~ks
is the maximum value of the norm of the reduced basis error Ilek(X,) I throughout the test
space
Btest.
The test space
Btest
= Ex tz x - t is an earthquake source-time space containing
p different values of the earthquake source x, and all time steps, where we perform the online
stage.
Next, the projected pressure distribution II(Pk(x,)) is defined as the argument that
minimizes the norm of the difference between vectors in the reduced basis space WN and the
the finite element pressure distribution Pk(x,),
42
1(P(x,))
= arg min jw - Pk(x)
I,
(
(4.17)
WEWN
which essentially is the projection of the finite element pressure distribution onto the basis
vectors space WN,
N
ai = (pk(X), (I)
II(Pk(X,)) = ZcY(i,
The projection error er(x 8 )
=
Pk(x 8 )
(4.18)
HPk(x8 )) is then defined as the difference
-
between the finite element Pk(X,) and projected II(Pk(X8 )) pressure distribution with the
corresponding norm as
Ie(Xs) 11= IIPk(Xs)
-
(Pk(X8 )) 11.
(4.19)
Similarly, the maximum norm of the projection error
|eillmax =
max
XsE-ain
kEki
~train
lek (Xs) ,
is the maximum value of the norm of the projection error Ilek(X,)
space
(4.20)
throughout the training
=train.
The greedy algorithm is now introduced.
The greedy algorithm selects basis vectors
within the training space Etrain and the procedure is as followed:
Step 1.
The first basis vector Pki(xzl) is fixed as the finite element pressure distribution
Pk(x,) at the last time step t
=
KAt, corresponding to the earthquake source x, = 0.50.
43
Step 2. Modified Gram-Schmidt orthogonalization is performed using equations (4.2), (4.3)
and (4.4).
Step 3. Equation (4.8) is solved for all values of the earthquake source x, and time steps in
the training space
3
train to yield the reduced basis coefficients P' (x,), which is substituted
into equation (4.7) to form the reduced basis pressure distribution PN(xe).
Step 4. Determine the norm of the reduced basis error
ek(X,) | and projection error Ile (X,)I
from equations (4.14) and (4.19) respectively, for all values of the earthquake source x, and
time steps in the training space
3
train; from which we obtain the maximum norm of the
reduced basis error ||e||tr,max and projection error Iler|max.
Step 5. If the maximum norm of the reduced basis error
lie||tr,max is less than the tolerance
e specified, the greedy algorithm terminates. Else, the finite element pressure distribution
Pk(X8 ) that corresponds to the maximum norm of the projection error lien |max will be the
next basis vector and steps 2 to 4 are repeated.
An effect of time marching in the temporal domain is that a high value of the maximum
norm of the reduced basis error |lelltr,max may be cause by an inaccurate reduced basis
pressure distribution PF(XS) at a previous time step. Hence, unless the finite element pressure
distribution Pk(x,) at that previous time step is chosen as a basis vector, the value of the
maximum norm of the reduced basis error |le||tr,max will not drop and the greedy algorithm
breaks down. Selecting the next basis vector based on the maximum norm of the projection
error ||ermax thus overcome this problem as the projection error e k(x,) does not have this
time marching effect.
4.4
Convergence Rate
With the introduction of the greedy algorithm, the numerical parameters
#
=
{.A,
At, -y, E
are expanded to include the size of the training space -y as well as the tolerance e.
standard numerical parameters
#,
take the values
44
The
05
=
{/
= 200, At = 0.01, y = 14, E = 1 x 10-6}
(4.21)
and the 14 different values of the earthquake source x, are selected in logarithmic interval
train,s =
4.4.1
{0.25, 0.28, 0.30, 0.32, 0.35, 0.38,0.42, 0.45, 0.50, 0.55, 0.60, 0.66, 0.73, 0.75}. (4.22)
Maximum Norm of the Projection Error
To determine the performance of the greedy algorithm, the convergence of the maximum
norm of the projection error ||er||max in the training space
numerical parameters
#,
Btrain
is observed. The standard
are used except that the tolerance e specified is lowered to 10--.
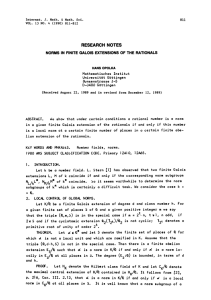
Generally, from figure (4-1), the convergence rate of the maximum norm of the projection
error lier max can be separated into 3 stages. In stage 1, there is a period of rapid convergence
where the maximum norm of the projection error lier
Imax drops 3 orders of magnitude
after
50 basis vectors are selected. This is followed by stage 2, a period of slow convergence where
an addition of slightly more than 100 basis vectors are needed to have the same decrease in
magnitude. Finally, stage 3 again has a fast convergence rate where an addition of roughly
30 basis vectors result in a drop of 4 orders of magnitude.
To better understand the reason behind this behaviour, we view the norm of the projection error lek(x,)
across the training space - train as the number of basis vectors selected
increases. Furthermore, the exact position of the basis vectors selected inside the training
space
strain
is marked. It is observed that the first 50 basis vectors contain the particular
time step which correspond to the region of time where the reflected and main waves meet,
for most of the different values of the earthquake source x,; seen as a line of horizontal red
dots in figure (4-1). These basis vectors are "general" such that other finite element pressure
distribution Pk(X8 ) can be accurately expressed as a combination of them. Hence, the norm
45
192 basis vectors
192 basis vectors
500
10
1-50
51-162
163-192
400-
0E10
c)o300
EE
E
-200-
E
CZ
E
_0
1010
-
_100
-
-
1150
training space: y = 14; maximum norm of projection error
test space: p = 11; maximum norm of reduced basis error
test space: p = 21; maximum norm of reduced basis error
9.2
200
number of basis vectors
0.3
0.6
0.5
0.4
earthquake source
0,7
0.8
Figure 4-1: Convergence rate of maximum norm of the projection error ller||max in training
space -train as well as maximum norm of the reduced basis error e te,max in test spaces E
(left) and the basis vectors selected by the greedy algorithm (right).
of the projection error
en (x,) drops rapidly and uniformly across the training space Etrain
as in figure (4-2).
After these "general" basis vectors are added, the norm of the projection error
e (x8 )
becomes a U-shaped trough extending along the time-domain, with high "peaks" in the 2
extreme ends of the earthquake source space and a flat "basin" around the middle as in
figure (4-2). The basis vectors selected are now mostly "specialize" and have little effect on
the norm of the projection error Ilek(x,)
other than those near its position in the training
space Etrain It is observed that the basis vectors selected are mostly clustered in 3 or 4,
either from earthquake source x, = 0.25 or x, = 0.75. The greedy algorithm selects basis
vectors alternately from these 2 regions, eliminating the various "peaks" one by one, with
a small drop in the norm of the projection error Ilek(x,)||. Hence, the convergence rate is
slow.
After eliminating most of the "peaks", the norm of the projection error |len(xs)ll across
the training space
=train is
now mostly uniform with no particular extremely high "peaks".
Furthermore, the number of basis vectors selected are now over a hundred. Together with
the additional basis vectors selected, the norm of the projection error Ile (x,,)I drops fairly
46
training space: 43 basis vectors
x 10
x 10
x
10'
12
-3
2
0
0
10
a)
C
training space: 137 basis vectors
-4
C:
0
o1-
1.5
8
.0
2
0.5.
6
1
0
C
4
0.5
C0.7
0.640
0.5
400
0.4
earthquake source
2
0.5
200
0.3
0
earthquake source
time steps
0
Figure 4-2: Norm of the projection error ie'(x,)J in training space
43rd (left) and 137th (right) basis vectors.
Btrain after
selecting the
uniformly and rapidly.
4.4.2
Maximum Norm of the Reduced Basis Error
Next, the convergence rate of the maximum norm of the reduced basis error lie
test space
Btest
ite,max
in the
is observed. We perform the online stage on the test space Etest and from
figure (4-1), it is observed that the maximum norm of the reduced basis error |e61te,max in
the test spaces
Btest
exhibit the same behaviour of the 3 stages of convergence. Furthermore,
2 different sizes of the test spaces are applied, p = 11 and p = 21, spaced equally within the
earthquake source space. Both test spaces =test have similar maximum norm of the reduced
basis error lie|te,max which imply that the size of the smaller test space, p = 11, is already
large enough to reflect the characteristics of the earthquake source-time space.
4.4.3
Numerical Parameters
Lastly, 3 of the numerical parameters
#: the dimension of the finite
element space K, time
step size At and size of the training space -y are varied to ensure that the dimension of the
reduced basis space N is independent of these numerical parameters
47
#.
According to figure
varying dimension of the finite element space
10
-N=200
N=400
0
C10--
(D=100-
10-
varying time step size
2
IV
N=800 N 1600
.
2
10
10-
-
At=0.01
A t = 0.005
A t = 0.0025
A t = 0.00125
2
-CC
10
-
10' 0
0
C
C
E E10
E10
E
0
50
200
150
100
number of basis vectors
0
250
50
150
100
number of basis vectors
200
Figure 4-3: Convergence rate of the maximum norm of the projection error er|Imax in
training space Brain for varying dimension of the finite element space K (left) and time step
size At (right).
(4-3) and table (4.1), it is observed that increasing the size of the training space -y has little
effect as the dimension of the reduced basis space N selected remain basically unchanged.
Increasing the dimension of the finite element space
K or decreasing the time step size At
result in an increase in the dimension of the reduced basis space N; which eventually tapped
to roughly a constant value.
4.5
Computational Cost
To consider the performance and computational cost of the reduced basis method, the operation counts are evaluated.
The computational cost consists of the offline stage which
is fixed and typically expensive as well as the online stage which is variable and relatively
inexpensive. Due to the complexity of the offline stage, the operation counts are evaluated
accordingly to the selection of the last basis vector (N. As the reduced basis method involves
time marching, operations that are performed only once are insignificant. Orthogonalizing
the basis vectors using the modified Gram-Schmidt orthogonalization as well as obtaining
the decomposed reduced matrices and vectors fall into this category. The operation counts of
the selection of the last basis vector (N by the greedy algorithm come mainly from obtaining
48
Variation of numerical
parameters #reduced
0S
y = 20
y = 25
/= 4.0 x
A/= 8.0 x
r = 1.6 x
At = 5.00 x
At = 2.50 x
At = 1.25 x
Dimension of the
basis space N
175
175
177
209
218
221
10 2
102
103
195
10-3
10-3
10-3
199
195
Table 4.1: Dimension of the reduced basis space N with various numerical parameters q.
the finite element Pk(x,) and the reduced basis PF(x) pressure distribution in the training
space
.train.Assuming that the operation counts for the finite element pressure distribution
Pk(X,) scales as CA/
for some - presumably close to unity, we will require OyCKJfU)
operations. Obtaining the reduced basis pressure distribution PN(X5 ) from the reduced basis
coefficients _N(xs) require another O(-yKNA)
operations. Hence, the offline stage for the
selection of the last basis vector (N will require 0(9yCKjf'
+ -yKNAr) operations.
After the completion of the offline stage, the decomposed reduced matrices and vectors
of equations (4.10) to (4.13) will be stored, with a storage counts of O((Q m +
Qa)N 2
). For
the online stage, the operation counts come from solving for the reduced basis coefficients
N(x,).
However, the left-hand-side matrix of equation (4.8) is first decomposed into an
upper and lower triangular matrices using LU decomposition before time marching. Hence,
for every time step, equation (4.8) is solved using forward and backward substitution, giving
an operation counts of O(KN 2 ) which is verified in figure (4-4).
Lastly, the time taken for the finite element method and the online stage is compared.
Their operation counts are O(CKo/)
and O(KN 2 ) respectively. For the one-dimensional
seismic problem, the dimension of the finite element space J1 is 200 while the dimension
of the reduced basis space N is 175 for the standard numerical parameters 0,. Hence, it
is expected that the online stage will take a longer time compared to the finite element
49
time taken between finite element method and online stage
operation counts for online stage
P 10
0)0.
0.4 -
10-0.3.
0
-- - 1 st try: 2.032
--- 2nd try: 2.016
---3d try: 1.957
10
10
10
order
order
order
10
.
--
-- finite element method
-- online stage
2
4
number of basis vectors
4
6
samples
8
10
Figure 4-4: Operation counts for online stage (left) and comparison of time taken between
the finite element method and online stage (right).
method, which is verified in figure (4-4). The finite element method and the online stage
take an average of roughly 0.53 and 0.65 seconds respectively. The efficiency of the offline-
online computational procedure should be more evident when applied to the two-dimensional
seismic problem where the dimension of the finite element space Ar is the square of its present
value and the dimension of the reduced basis space N is expected to increase but still has
the same order of magnitude.
50
Chapter 5
A Posteriori Error Estimation
5.1
Motivation
In Chapter 4, the reduced basis method and the formulation of the offline-online computational procedures are introduced. However, the inevitable question of how close the reduced basis pressure distribution Pi(x) compared to the finite element pressure distribu-
tion Pk(X8 ) is raised. Since the accuracy of the lower dimensional reduced basis pressure
distribution Pk(x 8 ) relative to the higher dimensional finite element pressure distribution
Pk(X8 ) is highly dependent on the numerical parameters # and the choice of the
basis vectors
{(1,...)N} selected by the greedy algorithm, how do we know whether the dimension of
the reduced basis space N is too small or too large? If the dimension of the reduced basis
space N is too small, the reduced basis error ek(Xs) may be unacceptably large. On the
other hand, if the reduced basis dimension N is too large, there will be a correspondingly
steep penalty on computational effect and a possible compromise of real-time performance.
To answer these questions, we must develop rigorous and sharp a posteriori bounds:
rigorous in order to provide certainty and sharp in order to ensure efficiency; with this error
bound, the reduced basis method can be performed in the most efficient method and with a
rigorously certified accuracy of the results.
51
5.2
Formulation
The a posteriori error estimation produces an error bound Ak (x,) from the reduced basis
pressure distribution and an output error bound
from the reduced basis output,
AN(S)
for which
ek(x)I
ek(x,)
I
Pk(xs)
Sk(x)
-
Ak(Xs),
(5.1)
))(x A k,N(XS),
(5.2)
Pk(x9)
-- S
where the reduced basis output error es(x,) is the absolute difference between the finite
element Sk(x 8 ) and the reduced basis S$(x,) output. Furthermore, the maximum reduced
basis output error
es,max =
max
S
(5.3)
XsGEtesstktest
is the maximum value of the reduced basis output error es(x8 ) throughout the test space
,-test-
5.2.1
Error Bound
Several preliminary definitions are first introduced before the proposition for the a posteriori
error estimation is developed.
The weak form of the finite element approximation from
equation (3.1) and reduced basis approximation from equation (4.5) are reproduced below.
Finite Element: Pk(x8 ) E X,
k = 2 ..., K,
52
P0 (xS) = P 1 (x8 ) = 0,
pk(x)
-
2Pk-K(x
m (
8
) + Pk-2(X)
At2
)
,v;x
aPk(X)
(
+pk-2(Xs) Iv;XS)
k
k-2
k +
k-2
2
Reduced Basis: PN( X) E WN E X,
m(PN(Xs)
-
2P$-1 (xs) +P-
k = 2,... , K,
,v;xs
v E X.
(5.4)
PN(X8 ) = PN(xs) = 0,
k (P) +
2
V
I(v)
Pk-2 (XS)
2,
+a
2
k
S
+
k-2
g 2g
V
h (v)
VE
X, (5.5)
from which the residual rk(v; X') is derived,
Residual: rk(V;)
rk (v; x)
=
9k
_9
r0 (v; XS) = r(V; XS) = 0,
k = 2,... , K,
C X,I
k-2 -
2 ± h(v)
PN(X)
- a(
2P
-
k(x)+
N
S
(x)+s
pk- 2 (Xs)
,v; x
)
Pki 2 (xS)
2
SV C X.
-IV;
' xS
(5.6)
From the definition of the reduced basis error ek(xs), equation (5.6) simplifies to the familiar
error-residual equation,
Error-Residual: ek(x)
m(ek(xs)
= Pk(x)
- 2ek-(x,) + 2ek- 2 (Xs)
,v;xs
2
At
k = 2,... , K,
-N
+ a (ek2(X) ±ek
2
e0 (XS)
(Xs) , v;
xS
=
)
e1 (XS)
= rk(v;
=
X').
0,
(5.7)
Next, several lemmas are introduced and proved. We first simplified the summation of
53
the mass function from the 2nd to K time steps,
Lemma 1.1: for any zi,
j=O,--
zi - 2zj-- + Zj-2
n
At
j=2
2
z0=
,n,
zI =
Zj _ Zj-2
I
n _
2m(Z
2
'
0,
n-1
t
n
'
Zn-1
At
(5.8)
;
Proof. From the left hand side of equation (5.8) and making use of the bilinear property of
the mass function, we separate the single mass function into 4 simpler mass functions:
j=2
+ Zj-2
z - 2zj-
n
Zj-
Zj-2
I:
M2A'
2
zi - 2zi- 1 + zj-2 Zk - Zj-2
At X
At
1 n
2 E
j=2
1
2j
; xS
{
M
-
-
(At' At'
zj-1
2m(Z
zj
At ' At'
.x)
+2m
zj-2 zj-1
At
At'
( ''t
z j-2 zi-2
-m
xA
(At ' At 's
Canceling of the same terms across the different time step simplifies into the right hand side
of equation (5.8).
zj
n
_
2j-1
At
m
+j-2
2
j-2
Z_
2
'
xS
j=22
Zn-i
At'
S
2
(Zn
z n-
At ,X)
Zn- 1
At
n
- 2m
Z n-(
zn
(At ' At'
-. S
)
+m
z'ZnA
(At't
)}
n-1;
;At
(5.9)
FD
54
Next, we simplified the summation of the stiffness function from the 2nd to K time steps,
Lemma 1.2: for any z3 ,
j = ,--
+ zj- 2 Zj - Zj-2
Sazi
7a
2
j=2
'
2
,n,
S)
z0 = z =0,
=1[a(zzn,Z; Xs) + a(Z n-I, z"n-1 ; -,r)]
(5.10)
Proof. Similar to the proof of lemma 1.1, from the left hand side of equation (5.10) and
making use of the bilinear property of the stiffness function, we separate the single stiffness
function into 2 simpler stiffness functions:
j= a I
Zj + Zj-2
2
Zj - Zj-2
'
j=2
2
a(zj + zj- 2 , zi - zj-2; X8 )
; -XS
j=2
n [a(zi, z ; x ) - a(zj-
2
, z - 2 ; Xs)
j=2--
41
Canceling of the same terms across the different time step simplifies into the right hand side
of equation (5.10).
We then simplified the summation of the residual function from the 2nd to K time steps,
Lemma 1.3: for any zi satisfying equation (5.6),
j=0,.-
,n,
z 0 = z1
=
0,
n
r
j=2
z - 2zj-2;
S) =
rn(zn;XS)
-
+ rn-I(zn-
2 (ri - rj- 2 )(zj-
-1
2
; x,).(5.12)
j=2
Proof. From the residual equation of (5.6) and making use of the bilinear and linear properties of the various functions, the equation is broken up into
55
-
and
22
-
terms:
n
z
j-2
Z_
Eri
n
_ Zj-2
+ gj-2 (
g
=I
; x8
2
2,
F
2
- 2Pfj7(xs) + PN7 (x 8)
zi
2}
2
j=2
(,P4(x)
2
-mK iAt
(
j
+ gj-2~jz>
2
h
2
-Z x
'2
(xs)
2
Pfj (x 8)
- 2Pfj-'(xs) +Nf
At
2
-
2
'
zi
2
At
2
;Z-2
z -j
(Xs)
Pkj(xs) - 2P- 1 (xs) + pFj72 (xs)
-
PaF(xs) + Pj7
-a
2
X )
a(
-
-
g
h__
2
Z --2
2x)
2
2'
2
'
2
pyI)+
+a
,- x,
2
pj- 2(xs) Zj-2
'
2
x
.
The first 3 terms form ri(-; x 8 ) while the rest of the terms are further broken down to
and (r
form r-2(zj22 ;x,)
rj
j
(
2
r
-;
-
;XS)
j=2
n
= I
r>-2)(z'j ;X,),
(-
9j-2 +gj4
2
j=2
+ F- 2 (xs) - 2Fj- 3
+m
(PF+
2(
(Pk(xs)
At
8
) +2
-
2 )
h
2
+ PF 4 (X,) z>3-2 ; XS
xS)
2
F- 4 (XS)
2
zj-
2
2 ;8
9
-
2
-4~ h Zj-2)
2
k2}
4
zj-2
2 Pj- (x 8 )
2
+ m (N
F(xs)
-
2P'-1(x,) + 2P
At
2
(x)
-
N
) Z-2
'
2
,xS
Canceling of the same terms across the different time step simplifies into the right hand
56
side of equation (5.12).
n
Zi - zj-2
2
n
{
r
j=2
1
; s)
- ;
2(-j;x
XS
- rj- 2 z.-2;x)
r nr(zn ; X ) + rn- 1 (z-1 ; XS)]
- (r i
Z-2'
-
xs
r j-2 ) (
- rj- 2 )(zj-
n (r
2
; XS).
(5.13)
j=2
D
Now, using the inner product with its associated norm of equations (3.10) and (3.11), we
show that the stiffness function of equation (3.7) is coercive,
Qa
a(w, w; x,)
=
8(x,)a
~
q(W, W)
q=1
Qa
>
a
Ea(xs)
(w,w),
ea(Xs) = min eq(Xs),
q
q=1
=
a(XS)
=
Oa(x,)a(w, w; x, = 0.50)
=
C(X)I W11 2.
inf a(w, w;2x,)
wEX
a (x,) =
||w|
a(Xs),
(5.14)
and the coercivity constant a(x8 ) takes the minimum of the system parameters-dependent
function of the stiffness function E8(X 8 ), 1 < q K Qa. Next, the dual norm 11- Ijx, is defined
as
57
liglix'
= sup g(v)
(5.15)
VEX ||vi
for any function v in the "truth" finite element space X.
Lastly, before we reach the proposition for the a posteriori error estimation, we develop
a bound for the norm of the reduced basis error Ilek(Xs) ,
Lemma 2: n = 2,. - , K,
Ilen(X,) 12
-
lle 0 (x,)I| =
+
|
X,)|x
||"
a(X,)2
Ie1 (x,)II
8
At
0,
(XI)112
Iei2(Xs)
(ri - ri-2)(XS)
tE
2At
(5.16)
X/
Proof. From the error-residual formula of equation (5.7) with v
= j(ek(X8
)
-
ek-2(x,))
and
summing from the 2nd to the K time step, we arrive at
( ek(Xs) - 2ek-l(x,) + 2ek-2 (Xs)
ek(X
)
-__ek-2
(x s)
)
j=2
+-a ( ek(Xz)
+
a2
+ek-2(Xs)
rk
ek(x,) _ek- 2(X
'2;
ek(xs)
_ ek-2(Xs)
xS
j=2
Substituting lemmas 1.1, 1.2 and 1.3 of equations (5.8), (5.10) and (5.12) respectively, the
above equation simplifies to
58
{ M
en(Xs) - en-1(Xs) en(X,) - en-1(X)
; X5
At
'
At
2
41
+ [,r(e n(Xs)e .
))
l+ (e - (, ) ,
1
1
= 2 r"(en(x); x) + r - (e - (x 8);
(-2z-);,)
n"
XS))
- r - )(e - (e);
(
)
-
2
2
x). (5.17)
j=2
From the coercivity property of equation (5.14) with W = en(x,) and en-I(X,),
a (X,)
e(x6)
2+
e1 -1 (x) 112 )
! a (en(X,), en(X); ze) + a (en-1 (X,),
en-1 (Xs); X,).
(5.18)
Substituting equation (5.17) into equation (5.18) simplifies into
1(s) (Ie(s)12 + flen-(Xs)112
n
-
-2
-(ri - rj~2 )(ej- 2 (X
8 ) Xs)
and dropping im(
en(xs)-)fl(X)
2
At
1a(x)
|e(X,)1|2 +
4
lie\
[rn(e"(Xj); X) + rn-1(en-1(Xs);X)]
-(
2
en(,) - e"- 1 (Xs) en(X8 ) - en-I(X,)
X
At
At
I en(x)-e
At '(X)
(X,)
xs)
, ,
(5.19)
which is symmetric positive definite gives
ieFr"(en(Xs);Xs) + r-1(e2/
- ~(ri
1
(8 );xS)]
-rij-2)(ej-2(X); xs).
(5.20)
j=2
From the definition of the dual norm in equation (5.15) with g(v) = rn(en(X8 );xs) and
r--
(,n- 1 (x);I 8), we arrive at
59
(
"(en
(X,); X) + rn-I(en-I(X,);
rX)(x)lXen(X,)I
1 (x
+- rn- 1 (x 8 ) lxc ne"8 )
. (5.21)
Substituting equation (5.21) into equation (5.20) simplifies into
Ia(x )(le n(Xs)12 + lenl(xs)12)
r (X)Ixs
IX e(X)1 + ljr n (Xs) Ix,
(r - rl- 2 )(e-
-
2
Ilen-l(X)l)
(x ); X8)
(5.22)
Taking the norm of equation (5.22) and applying the inequality 11b - c| < Ilbl + jIcj| give
~a~ 8 )
(en(X,)
12 + |len-(x)112
rn(x.) lx'le,(X,)l + lrn-1(X,) lxl en-1(Xz)II
+A
E
(,_
-
lien(X,)Il
2
+
2 (X5)
e-
(5.23)
X
2t
j=2
Further applying of another inequality 21clIdl < qjc
2 )(X,)
1d 12 with c =
llrn(xs)lIx, and d =
1
as well as c = llrn- 1 (Xs)llx, and d = IIen- (X)I together with q
=
g
simplify
equation (5.23) into
I a(x )
( en(Xs)12 + 11lenl(xs)
+ a(
e
n
))
2
2)
2a(x,) (lrn(xs)
+ 11en- 1 (xs) 12 + At
/
60
x,
+ r"-I(X,)
2-rj2 (X )
j=2
2A.t
X/
x
2(
Xs)|
_a-
s/j
(5.24)
en- 1 (x,) 2 term which is
Finally, grouping the similar terms together and dropping the
always positive proved the lemma.
|Ie"(X,)12
2) + l(rX-(x1)1
(x'r(s)
(
{()2
8
+
n
(ri - r -2)(X
s2
j=e)
2t
At 1
)
IIej-2(xs) )}.
(5.25)
FD
Therefore, from lemma 2 of equation (5.16), the proposition for the a posteriori error
estimation of the error bound A' (x,) is developed as the following,
Proposition: for n
=
0, - - - , K,
lie n(X,)|I
-
A3 (XS)
and for n
Ny ({)
=
-=
An (X,),
22ex,
12r()
2
(r 2(X8)lix,
oa(xe)
lx,,
(5.26)
+ |Ir 3 (xs) II
,
(5.27)
4,.
a((X)2
||r ,(Xs) 112 + ||rn- (X,)
I 2)
8
(r _j-'
22t(X)
2=2
Ca(X,)
5.2.2
AOy (x)= A' (xS) = 0,
Output Error Bound
Now, we develop a bound for the reduced basis output error es(xS),
61
. (5.28)
Lemma 3: n
=
2,*--
, K,
(X,) = e' (X,) = 0,
CO
|L Ix, je,(x3)I.
e7S(x,)
(5.29)
Proof. From the definition of the reduced basis output error es(x 8 ) as well as equations (3.2)
and (4.6),
es(xs)
= S"(x,) - S7 (xs)I
=
I(Pn(x,)) - e(Pj(xs)) I
Using the linear property of the output function,
eS (x,) =
(x,) - P (xs))|
|(P
I(F(Xs) -
F (x))|P(x
8
Pn(xs) - PII,(x8)
)
- PjN(xS) 1-
Lastly, from the definition of the dual norm in equation (5.15),
e6j(x8 )
sup
<
|(v)|Pl(x,)
xVEX
=
"V(
-
PK(x)||
.
(5.30)
Hlxtile n(X,) 1.
0
Hence, from lemma 3 of equation (5.29), the proposition for the a posteriori error estimation of the output error bound A',Nxs is developed as the following,
Proposition: for n = 0, - - - , K,
en (xs) < ASN
62
S)
SN
)
,N (s
AS,N(Xs)
for n=2,--
5.3
5.3.1
,
fI X'AN(X8,,
(5.31)
K.
Offline-Online Computational Procedures
Duality
In order to determine the error bound Ak (x,) of equations (5.26), (5.27) and (5.28) as well as
the output error bound AkSN(XIS) of equation (5.31), the dual norm of the residuals ||ri(x,) |x,
and 1 (rJ-J)(Xs) x, at all time steps as well as the dual norm of the output function |j x,
must first be solved. From the standard duality argument, the residual can be expressed as
k(x,) E X,
rk(V; X.9) = (81 (X,), V),
(5.32)
and substituting into the dual norm of equation (5.15), we obtain
rk(xs)|x'
sup rk(v; x8 )
vex
|v||j
=
sup (6k(xs),v)
vex
1|vi|
(5.33)
and applying the Cauchy-Schwarz inequality, the above equation simplifies to
||rk(xs) Ix/ < Yk(X5) lv
|1v||
However, if v
=
8k(X'),
63
=--
k(x8)ij.
(5.34)
( ))
Iirk(xs)lx, < 8(x,),8l
__
Y1i(X8)ll
and it is possible for v
=
(Xs) 112
=
8i6k(xs) 1,
(5.35)
jj8k(X)II
Bk(x 8 ) since ek(x 8 ) E X, we have shown that
rk(Xs)11x,
(rk
-
llk(Xs)ll,
=
rk-2)(Xs)
2At
1
k(xs).
2At
X,
(5.36)
(5.37)
In a similar fashion, the output function can be expressed as
=(
)(v)
6s E X,
(5.38)
and substituting into the dual norm of equation (5.15), we obtain
f(v)
xf =Xsup
vEX ||v\\i
=sp(8s,v),
sup
liv||
(5.39)
and applying the Cauchy-Schwarz inequality, the above equation simplifies to
11fl1x',
S 11 1 -l |s11.
Ps116=
||V||
However, if v = Cs,
64
(5.40)
a x< (6s'
114lI
| s 11I
(5.41)
-=l8sgI,
118sI1
and it is possible for v = s since 6S E X, we have shown that
| Ix/ =
5.3.2
(5.42)
116s|1.
Linear Superposition
Similarly, the a posteriori error estimation can be decomposed into offline-online stages. In
order to solve for the error bound A' (x,), we first solve the dual norm of the residuals
Iri(x,)i x, and 11(r-
(Bk(x,),v)
=
sX,)X' using equations (5.36) and (5.37) as well as equation (5.6),
{k+
k-2
2
Ih(v)
-
9 k2
9
2
(Xs)
,
At2
k(x ) + P
2
XN
-a
(6k (Xs),V)
P-
-+
m(
- h(v) - m(PNXS)
S
-a
-
2
(xs)
v ;x
,N
8
}
V;
x5
V
VE
2Pk_(xs) At 2
P(x ) - P-(x)
S 2 N
v; x)
) 'N
X, (5.43)
, v;x 5
}
V
v E
X, (5.44)
which are further simplified using the affine parametric structure of equations (3.6) and (3.7),
65
Qm
(6k(X)V)
N
{kh(V)
=
x,)n
m( m,n
q=1 n=1
N
Qa
(5.45)
q=1 n
+ k-2
k
~k =
2
-
Nn
N,xn (s)
,n
At
s
eN,n (X)
2, n(Xs)
Qm
(r(Xs),V)
N(n
2
2Nn
2
N
h(V)
=
a=1
m
L
smrn (smq (n
V
q=1 n=1
Qa
N
-q=1 rn=1
~k
g
A
(k
=
9
k-4
k
2
(Xs
-
Nn
m ,n (Xs
Aa n (Xs)
__N2n n (X)
At
Nnxs
Nn
66
2
L
a
((n v)
, (5.46)
The offline-online computational procedures are now explained. However, only the procedure for equation (5.45) is shown as similar approach is applied to equation (5.46). For
clarity, we first further simplify equation (5.45) to
(8(xs), v)
kh(V)
=
Qm+Qa N
9
-q=1
Qm ,
where when 1 < q <
Qm
+ 1
Qm
q
As(x8 )
for C c X satisfying (C, v)
i N, 1 < q
6k (Xs)112 _
Am~(x 8 ) and Bq((n, v) = mq( n, v) as well as when
=
v). Next, from linear
k(xs) E X as
6k(Xs)
1
(5.47)
n=1
+ Qa, )q,(x,) = A&, (xe) and B
superposition, we write
VvEX
-
(x,)Ak(
jk)2(C, C) +
=
Qm +Qa
N
q=1
n=1
kC +
(q(xs)A k
(5.48)
h(v), V v E X and L4 E X satisfying (Lq, v)
Qm
B((n, V),
+ Qa. It thus follows that
1:I:4q(x)A
q=1
--
( ,
2(C
q)
n=1
Qm+Qa
N
+
n'=1
q'=1xs
'(x 8 )A ,, (x ) (,
Ln
}
)
.
(5.49)
The offline-online computational procedures are now clear. In the offline stage, which is
performed only once, C and £n, 1 < n < N, 1 < q <
are first solved.
(C,Ln) and (L,
Qm
+ Qa as well as 6s, 1 < n < N,
Next, the relevant system parameters-independent inner products (C, C),
1
nn' <N, 1
q,q'
Qmr+Qa as well as (&s,8s), 1
n <N, are
evaluated and saved. Note that all quantities computed in the offline stage are independent
of the earthquake source x,. In the online stage, which is performed many times for different
67
value of the earthquake source x8 , equation (5.49) is evaluated by summing the system
parameters-dependent terms .k,
equations (5.26),
eq(x,)
and A k,"(x,) with the stored inner products. Next,
(5.27) and (5.28) are solved to obtain the error bound A k(x,).
From
the stored inner product of (&s,8s) and the error bound AkN(4X), the output error bound
AS,N(XIs) is solved from equation (5.31).
The operation counts for the a posteriori error estimation is O((Qm + Qa) 2 N 2 M) in
the offline stage, coming from evaluating (Lq,
Lq',),
1 < n, n' < N, 1 < q, q'
< Qm +
Qa.
However, this is insignificant compared to the offline stage reduced basis operation counts of
0(yCK.fa + -yKNJV), which depend on the total number of time steps K (K
> Qm + Qa).
Also coming from (Lq, L,), the additional storage counts amount to O((Qm+Qa)N2 ), which
is equal to the existing reduced basis method storage counts. On the other hand, the online
stage requires O(K(Qm + Qa) 2 N 2 ) operation counts which come from evaluating the last
term of equation (5.49),
1
n, n' < N, 1 < q, q' <
xi, AN
Qm + Qa.
I
I
(x,)As
(xs)
,L
Comparing with the existing online stage reduced basis
of O(KN 2) operations, the error estimation is slightly more computational expensive. Hence,
the whole reduced basis method and a posteriori error estimation requires O(yCKJf0 +
7KNK) operation counts for offline stage, 0((Qm + Qa)N 2 ) storage counts and O(K(Qm +
Qa) 2 N 2 ) operation counts for online stage.
5.4
Effectivity
Several definitions are first introduced before we examine the performance of the a posteriori
error estimation. Equations (5.26), (5.27), (5.28) and (5.31) give the error bound AN(x 5 )
and the output error bound
S ,N(Xs).
AN,max
=
We define the maximum error bound
max
Ak(X),
asC=X8-te~ktrkrtest
as the maximum value of the error bound A k(X,)
68
throughout the test space Etest-
(5.50)
The effectivity y7N(x,) is defined as the ratio of the error bound AN(x,) over the norm of
the reduced basis error Iek(Xs),
Ak(Xs)
ek(xs)
(5.51)
while the maximum effectivity
77N,max =
max
x
ok(Xs),
E=eXstkEstk
(5.52)
is the maximum value of the effectivity pk(X,) throughout the test space Etest. Furthermore,
the maximum bound-maximum error ratio
AN,max
te,max
N,max
(5.53)
is defined as the ratio of the maximum error bound AN,max over the maximum norm of the
reduced basis error ||el|te,max in the test space
Ztest.
In a similar fashion, the maximum output error bound
AS,N,max
-
max
SE-tst )kE k
(5.54)
is the maximum value of the output error bound ASN(XS) throughout the test space Etest.
The output effectivity q ',N(Xs) is the ratio of the output error bound ASN(XS)
reduced basis output error es (Xe),
69
over the
k)
SN(Xs)
SI,N (X
e k,(Xs)
(5.55)
,
(5.56)
while the maximum output effectivity
7
S,N,max
max
=
test
XsEestike
is the maximum value of the output effectivity
SN(XIS)
throughout the test space Etest.
Lastly, the maximum bound-maximum error output ratio
AS,N,max
eSmax
S,N,max
(557)
is defined as the ratio of the maximum output error bound
AS,N,max
over the maximum
reduced basis output error eS,max.
5.4.1
Convergence Rate
We now determine the performance of the a posteriorierror estimation by examining the convergence of the maximum error bound AN,max, maximum effectivityqN,maxand the maximum
bound-maximum error ratio N,max as well as the maximum output error bound AS,N,max,
the maximum output effectivity
ratio
S,N,max.
rTS,N,max
and the maximum bound-maximum error output
The standard numerical parameters
e specified is again lowered to 10-1.
#,
are used except that the tolerance
Furthermore, 2 different sizes of the test spaces are
applied, p = 11 and p = 21, spaced equally within the earthquake source space.
From figures (5-1) and (5-2), it is observed that the maximum error bound AN,max and
maximum output error bound AS,N,max decrease as the number of basis vectors increase with
a convergence rate similar to the maximum norm of the reduced basis error Ile Ite,max and the
70
test space: 192 basis vectors
test space: 192 basis vectors
105
10
A
2S
.0
=3
003
---
1
10
(
10
El
_
0_
10
E
-
Cz
E
p = 11: maximum bound-maximum error ratio
p =21: maximum effectivity
p =21: maximum bound-maximum error ratio
2
Q -5
10
-E
E EE
E
-2 p = 11: maximum effectivity
5
0
_
_
_
p=11: maximum
p =11: maximum
p = 21: maximum
p = 21: maximum
50
__
_
_
_
_
M
100
150
.0
102
norm of reduced basis error errror bound
norm of reduced basis error
errror bound
cz
50
0
200
150
100
200
number of basis vectors
number of basis vectors
Figure 5-1: Convergence rate of the maximum norm of the reduced basis error e te,max and
maximum error bound AN,,= (left) as well as maximum effectivity
bound-maximum error ratio N,max (right) in test space Ztest.
qN,max
and maximum
maximum reduced basis output error es,max respectively. Furthermore, the maximum error
bound AN,max is always roughly 2 orders of magnitude higher than the maximum norm of
the reduced basis error lelIte,max while the maximum output error bound
AS,N,max
is roughly
4 to 5 orders of magnitude higher than the maximum reduced basis output error es,max. This
is expected since the error bound A'(x,) is based on the dual norm of the residuals which
in turn is proportional to the norm of the reduced basis error Iek(x,)
and the output error
bound Ak,N(Xs) is proportional to the error bound AkN(X).
77N,max
remain fairly constant as the number
of basis vectors increase with a magnitude of O(10).
However, at stage 3 of the conver-
On the other hand, the maximum effectivity
gence curve, the maximum effectivity UN,max increases rapidly. It is observed that at some
particular locations in the test space
Ztest,
"peaks" of exceptionally high effectivity rk (Xs)
is present. These "peaks" correspond to a time step where the norm of the reduced basis
error IIek(x,)
is exceptionally low as shown in table (5.1), which could be due to the greedy
algorithm selecting a basis vector near that region. With a lower value for the norm of the
reduced basis error IIek (x,),
k
it will be no surprise that a higher value for the effectivity
(x,) is obtained. This in turn, push up the maximum effectivity
71
'1N,max-
However, this
LeSLspae:
vetors0 we
5
10 510
2
asi
LSL pace: 192 basis veCtoi s
02
-
100
0
_--
1
5 =
10
-
p = 11: maximum output effectivity
p= 11: maximum bound-maximum error output ratio
p = 21: maximum output effectivity
p=21: maximum bound-maximum error output ratio
00
-
10
-
1a
10
E
ndE
upterrrb
- ----p=1:mxm
E:0 E 10
p = 11: maximumm reduced
basis output error
0 100E
E
5
C
- -p = 21: maximum reduced basis output error
-p = 21: maximum output errror boundEE
1
150
50
100
number of basis vectors
0
200
E
.
1&
01
E1
0
100
150
50
number of basis vectors
200
Figure 5-2: Convergence rate of the maximum reduced basis output error eS,max and maximum output error bound AS,N,max (left) as well as maximum output effectivity qS,N,max and
maximum bound-maximum error output ratio ($,N,max (right) in test space Btest.
is not a concern because this means that the reduced basis pressure distribution P( x,
is
closer to the finite element pressure distribution Pk(x,).
Instead, the cases where the norm of the reduced basis error
Ilek(x,)
are large are more of
a concern. From figure (5-1), it can be seen that the maximum bound-maximum error ratio
&N,max has
roughly a constant value of 400, which correspond to the 2 orders of magnitude
difference between the maximum error bound AN,max and the maximum norm of the reduced
basis error e Itemax. This implies that the effectivity ikv(x 8 ) does not blow up when the norm
of the reduced basis error lIek(x,)I| is large.
In the same manner, from figure (5-2), we observed that the maximum output effectivity
1
7S,N,max
remains fairly constant as the number of basis vectors increase with a magnitude
of 0(10'). Again, this high value of the maximum output effectivity 77S,N,max is due to a
low value for the reduced basis output error es(x,), as seen from table (5.2). Furthermore,
this extremely high value for the maximum output effectivity qS,N is very misleading as the
"peak" is unexceptionally high compared with the rest as seen in figure (5-4). In reality, the
maximum bound-maximum error output ratio
0(104 -
S,N,max
only have a constant magnitude of
105). After the 170th basis vector, the maximum reduced basis output error eS,max
72
Time step
k
340
341
342
343
344
345
J
Error bound
N(Xs)
7.2122
7.2376
7.2613
7.2891
7.3150
7.3412
x
x
x
x
x
x
10-4
10-4
10-4
10-4
10-4
10-4
Norm of the reduced
basis error Ilek(xs)!1
1.2322 x 10-6
1.5104 x 10-6
8.6385 x 10-7
1.3881 x 10-6
7.9637 x 10-7
1.4875 x 10- 6
Effectivity
(Xs)
5.8530
4.7918
8.4058
5.2511
9.1855
4.9352
x 102
x 102
x 102
x 102
x 102
x 102
Table 5.1: Error bound AkN(x,), norm of the reduced basis error ||ek(x) 11 and effectivity
2k7(x 8 ) for earthquake source x, = 0.25 at the 170th basis vector from the 340th to 345th
time step.
Time step
k
Output error
bound Ak,N(xs
185
186
187
188
189
190
1.7669
1.7823
1.7973
1.8162
1.8371
1.8565
x
x
x
x
x
x
10~4
10-4
10-4
10-4
10-4
10-4
Reduced basis
Output effectivity
output error ek(Xs)
2.2110 x 1010
2.6065 x 10-10
3.1031 x 10-10
1.1953 x 10-12
2.2444 x 10-1
2.7442 x 1010
?S,N(XS)
7.9917
6.8381
5.7919
1.5195
8.1851
6.7651
x
x
x
x
x
x
105
105
105
108
106
105
Table 5.2: Output error bound AN (XS), reduced basis output error e(x,) and output
effectivity rkN(XS) for earthquake source x, = 0.75 at the 158th basis vector from the 185th
to 190th time step.
is of magnitude O(10-") while some of the reduced basis output error es(x,) have the same
magnitude as machine precision.
This explains why the maximum reduced basis output
error eS,max stagnates, resulting in a drop in the maximum bound-maximum error output
ratio
S,N,max.
Furthermore, there are instances where the reduced basis output error eS(xS)
is zero instead of machine precision, resulting in the maximum output effectivity
7S,N,max
having a value of infinity. This explains why the maximum output effectivity graph in figure
(5-2) has discontinuities.
Lastly, as seen from figures (5-1) and (5-2), the 2 different sizes of test spaces, p = 11
and p = 21, have similar maximum error bound
73
AN,max,
maximum norm of the reduced
basis error
jlejtemax,
maximum effectivity
'N,max
N,max as well as maximum output error bound
error eS,max, maximum output effectivity
output ratio
and maximum bound-maximum error ratio
AS,N,maX,
'TS,N,max
maximum reduced basis output
and maximum bound-maximum error
Again, these imply that the size of the smaller test spaces, p
S,N,max.
=
11, is
large enough to reflect the characteristics of the earthquake source-time space.
Engineering Practise
5.4.2
It is important to understand that in engineering practise, it is often not required to reach
such a low value for the norm of the reduced basis error llek(x,)
output error es(x 8 ).
I and the reduced basis
More often, a tolerance E of 10-2 is sufficient.
This corresponds to
just 38 basis vectors using the standard numerical parameters 0,. From figure (5-3), we see
that the region where the norm of the reduced basis error lIek(x,)Il is low corresponds to the
region where the effectivity ?7k(x,) is high. The maximum effectivity
894 while the maximum bound-maximum error ratio
N,max
lN,max
is a "peak" of
is 336. Similarly, from figure (510') although the maximum
4), the output effectivity
SN(XIS) is of a magnitude of 0(104
output effectivity
is an extremely high "peak" of 1.984 x 10 7 due to a low value for
?ls,N,max
-
the reduced basis output error es(x,). The maximum bound-maximum error output ratio
S,N,max
is 4.275 x 103.
5.4.3
Numerical Parameters
Next, 3 of the numerical parameters
#:
the dimension of the finite element space .A, time
step size At and the size of the training space -y are varied to ensure that the maximum
effectivity
'TN,max,
maximum bound-maximum error ratio N,max, maximum output effectivity
77S,N,max and maximum bound-maximum error output ratio S,N,max are independent of these
numerical parameters
#.
From tables (5.3) and (5.4), it is observed that when the size of
the training space -y or the dimension of the finite element space
.V
are increased as well as
when the time step size At is decreased, there are fluctuation in the values of the maximum
effectivity
'TN,max,
maximum bound-maximum error ratio N,max, maximum output effectivity
74
MINNUMM01-
--
w
test space: p = 11; tol = 10-2; 38 basis vectors
test space: p = 11; tol = 10-2; 38 basis vectors
x 10-
x 10'
2
800
800-
8
L
700
L
600
600-
500
400
0,
k 4400
Z0,
a) 2,-
200
0.8
0
0.8
300
200
0.6
100
0.4
0.4
earthquake source
0.2
0
earthquake source
time steps
Figure 5-3: Norm of the reduced basis error I|ek(x,)
the standard numerical parameters
1
#,
test space: p = 11; tol = 10-2 38 basis vectors
x 10
x
test space: p = 11; tol
10- 5
x 106
18
-14
12
15
5
4
C,,
10-2; 38 basis vectors
16
I
6-
=
x 106
I6
2
(left) and effectivity r7N(xI) (right) for
except using a tolerance E = 10-2.
S) 10,
10
3
8
0
2
0
-10.8
400
0.4
earthquake source
1
time steps
4
0.6
2
0.4
200
0.2 0
6
0
0.8
earthquake source
200
0.2 0
time steps
Figure 5-4: Reduced basis output error es (xe) (left) and output effectivity 1
for the standard numerical parameters #, except using a tolerance e = 10-2.
75
(S,N(x
8 ) (right)
Variation of numerical
parameters (
#s
= 20
= 25
A= 4.0 x 102
= 8.0 x 102
K = 1.6 x 103
At = 5.00 x 10-3
At = 2.50 x 10-3
At = 1.25 x 10-3
Maximum
effectivity TN,max
1.314 x 103
1.625
2.244
1.182
9.631
9.508
2.109
4.896
4.338
x 103
x 103
x 103
x 102
x 102
x 103
x 103
x 103
Maximum bound-maximum
error ratio
5.393 x
5.164 x
5.449 x
5.314 x
6.299 x
5.663 x
7.141 x
9.004 x
7.711 x
&N,max
102
102
102
102
102
102
102
102
102
Table 5.3: Maximum effectivity TN,max and maximum bound-maximum error ratio
with various numerical parameters q.
7TS,N,max
and maximum bound-maximum error output ratio S,N,max- However, when these
3 numerical parameters
5.4.4
N,max
#
are further refined, convergence is experienced.
Direct and Linear Superposition Methods
Finally, it is worth noting that the error bound A'(x,) can be obtained using 2 different
methods. The first is the direct method where the dual norm of the residuals of equations
(5.36) and (5.37) are obtained directly by first obtaining k(x,) and &(x)
for all time steps
using equations (5.43) and (5.44). The second is the linear superposition method where
the dual norm of the residuals of equations (5.36) and (5.37) are obtained from equation
(5.49). Both methods should give the same value for the error bound AN(xs)'
However, it is observed that the linear superposition method breaks down as the tolerance
E is lowered. Hence, the results presented are all based on the direct method. The reason
behind the breaking down of the linear superposition method is due to heavy canceling of the
various offline stage matrices. The various offline stage matrices typically has a magnitude
of 1 while the linear superposition of all these matrices will result in the square of the dual
norm of the residuals having values of very small order of magnitude; which decreases as the
tolerance E is lowered. We define the maximum error bound difference
76
Variation of numerical
parameters #
Maximum output
effectivity 77S,N,max
OS
1.164 x 109
2.697 x 1010
2.997 x 109
6.163 x 109
3.360 x 109
2.351 x 10'
2.472 x 10"
3.251 x 10"
2.987 x 1010
= 20
= 25
. = 4.0 x
A = 8.0 x
g = 1.6 x
At = 5.00 x
At = 2.50 x
At = 1.25 x
102
102
103
10-3
10-3
10-3
Maximum bound-maximum
error output ratio S,N,max
5.252 x 105
6.444 x 105
6.674 x 10'
4.728 x 105
2.432 x 105
3.375 x 104
7.548 x 105
7.842 x 105
5.526 x 105
Table 5.4: Maximum output effectivity 7S,N,max and maximum bound-maximum error output
ratio S,N,max with various numerical parameters q.
eA,max =
AN,D,max
AN
-
AN,L,max
(5.58)
max
AN,D,max
as the ratio of the absolute difference between the maximum error bound obtained using the
direct method
AN,D,max
and the linear superposition method
error bound obtained using the direct method
AN,L,max
over the maximum
AN,D,max-
For earthquake source x, = 0.50, from table (5.5), after the 130th basis vector is added,
which correspond to the maximum norm of the reduced basis error jle|jtr,max having a value of
8.0681 x 10-5, the maximum error bound difference eA,max has already raised to a magnitude
of 0(10-5). After the 171st basis vector is added, which correspond to maximum norm of
the reduced basis error ||e||tr,max having a value of 9.9654 x 10-7, the square of the dual
norm of the residuals is of magnitude 0(10-") which is very close to machine precision.
Hence, precision error sets in and some of the square of the dual norm of the residuals
actually become negative, giving raise to the dual norm of the residuals having complex
values.
From this point onwards, as more basis vectors are added, the maximum error
bound difference eA,max give complex values and the error bound A'N(x,) obtained using the
linear superposition method is no longer accurate. However, in engineering practise, if only
77
Basis vectors
(i
125
126
127
128
129
130
131
132
133
134
135
165
166
167
168
169
170
171
172
173
174
175
Maximum norm of the
reduced basis error Ie||tr,max
9.5679 x 10-5
8.9902 x 10-5
8.5453 x 10-5
8.4350 x 10-'
8.4288 x 10-5
8.0681 x 10-5
6.6023 x 10-5
6.3822 x 10- 5
6.1431 x 10-5
4.9355 x 10-5
4.4107 x 10-5
3.0823
2.6660
2.1768
1.8290
1.6171
1.1591
9.9654
8.6466
7.8340
5.5508
5.0837
x
x
x
x
x
x
x
x
x
x
x
Maximum error bound
difference Ce,max
7.7126 x 10-6
8.2462 x 10-6
8.6354 x 10-6
9.8195 x 10-6
9.1751 x 10-6
1.1256 x 10-5
1.2478 x 10-5
1.4101 x 10-5
1.5015 x 10-5
1.8976 x 10-5
2.1413 x 10-5
10-6
10-6
10-6
10-6
10-6
10-6
1.2811
1.5821
2.2437
3.4929
5.7943
10-7
10-7
10-7
10-7
10-7
1.6751 x 10-3
2.1095 x 10-3
3.2185 x 10-3
4.8284 x 10-3
5.5965 x 10-3
9.0705 x 10-3
x 10-2 - 3.5365
x 10-2 - 3.2175
x 10-2 - 8.8710
x 10-2 - 4.5262
x 10-2 - 6.7777
x
x
x
x
x
10- 4 i
10- 4i
10- 4i
10-3i
10-3i
Table 5.5: Maximum norm of the reduced basis error ||e||tr,max and maximum error bound
difference eA,max for earthquake source x, = 0.50 as basis vectors (j are increasing added.
a tolerance E of 10-2 is sufficient, the linear superposition method is still workable.
78
Chapter 6
Inverse Problem
6.1
Formulation
The inverse problem is now formulated. As the occurring time T has a role to play in the
inverse problem, we will be using the system parameters y = {x, T} instead of just the
earthquake source x,. We assume that, for the one-dimensional seismic problem described
by equations (3.1) and (3.2), the actual system parameters p* E D (though fixed) is unknown
and must be determined in real-time by appropriate comparison of field measurements and
the reduced basis output SN(ft).
We shall assume that the output Sk(p) is recorded at a total of K different time steps.
We further assume that from these field data, we can conclude that
Ski(,)
E Sk,
1 <
i < c;
here Ski (p) denotes the output Sk (p) at the particular ki time step and 9 ki
notes the measured field error where
Ski
and
Ski
(6.1)
=
[Ski
7'i]
de-
are the lower and upper measured field error
respectively. Furthermore, we are implicitly assuming that there is no unknown systematic
measurement error. In actual practice, even under the best circumstances, in the presence
79
of field error, it will be impossible to determine exactly the unknown system parameters
,*.
We thus prefer to provide a "possibility region" P which corresponds to all possible
system parameters 1 consistent with the field data. Each ki time step will provide its own
"individual possibility region" Pi and their intersection will give the "possibility region" P.
Hence, it is easy to deduce that the "possibility region" P can be expressed as
P=
(6.2)
n
)Di
1<i</C
where
{p E=D Ski()
E
1 < i< C.
ki},
(6.3)
We next introduce some definitions. From the reduced basis output error es(pu) and its
output error bound ASN(A), the output bound gap SX(M) is defined as
,qk
k(6.4)
k
, A(A) = [S , -(,a), S!, +(]
(0.4
where S,_ ([t) is the lower output bound and SA,+(p) is the upper output bound. The lower
output bound S,_ (_p)is simply
Sik,_ ()
and the upper output bound SX,4()
= Sk(M)
is
80
--
,
,0
(6.5)
ki
k,
k,
k
k-
&+T
T'
~
II'
s, _(p)
I.
(A
k ITjr
e IL
s
I sL(p)
kj.JL
k,
..
.. sP_(p).
T.
s'(pA)
ki)
s
This particular system parameters p is
not the actual system parameters p
This particular system parameters p may be the actual
system parameters p* according to this time step kl.
according to this time step ki.
Figure 6-1: At a particular ki time step, 6 different configurations between the output bound
gap Si(M) and measured field error Eki.
Sq+
Lastly, we define an inverse space
containing
T
_t) = Sk(It) + AkN(I1-
.inverse
=inverse x
(6.6)
inese: a system parameters space
different system parameters ,.
The procedure for determining the "possibility region" P is then as follow:
Step 1. Perform the online stage for all the
space
3
T
different system parameters P in the inverse
inverse by solving equations (4.8) and (4.9).
Step 2. Obtain the reduced basis output S_ (,u) as well as its output error bound
for all ki time steps, 1 < i < IC and calculate the output bound gap SA ()
N(f)
from equations
(6.5) and (6.6).
Step 3. Compare the output bound gap S(p)
81
with the measured field error
as seen
from figure (6-1), if the output bound gap Sk (pu) is outside the measured field error
S
(t)+>
E),
or
Si±(p) <
Ski
(6.7)
ki
that corresponding system parameters /t is not the actual system parameters p*. Taking the
complement will give us the "individual possibility region" Pi for the ki time step.
Step 4. The intersection of the /C different "individual possibility region" Pi from the various
ki time steps will give the "possibility region" P.
6.2
Results and Discussion
6.2.1
Size of the Inverse Space
It is important to note that the size of the inverse space
T
should be large enough such that
the output error bound AkN(y) and the difference in reduced basis output Sx (p) between
adjacent system parameters p should be of the same magnitude. This is to ensure that the
inverse space
7inverse
has sufficient system parameters p to produce the "possibility region"
P. We use the system parameters domain D as the inverse space -inverse, where the system
parameters p are the combination of earthquake source x, and occurring time T ranging
from 0.25 to 0.75 in intervals of 0.01.
Hence, the size of the inverse space is r = 2601
and the difference in reduced basis output Sk(p) between adjacent system parameters A is
about 0.04. Using the standard numerical parameters
,A,N(At)
#,
will produce an output error bound
of magnitude O(10-5).
Hence, we have to increase the size of the inverse space
of the inverse space
T
T.
However, increasing the size
will cause step 1 of the procedure of the inverse problem to be highly
computational expensive. Therefore, we increase the magnitude of the output error bound
A,N(t)
instead. Although the standard numerical parameters
#,
is still used for the inverse
problem, the tolerance E is changed. We use only the first 62 basis vectors which correspond
82
to a maximum output error bound AS,N,maX of 0.047 and the maximum norm of the reduced
basis error |ejljt,max is 1.513 x 10-3.
6.2.2
Total Number of Time Steps for Comparison
We performed the above procedure of the inverse problem by considering an "unknown" (to
the code but known to us) actual system parameters p*. We observed that the time step
used affects the "individual possibility region" Pi when we compare the output bound gap
S
(IL) and measured field error
'ki
for a particular ki time step. From figure (6-2), when
the particular ki time step selected correspond to the plateau at the peaks and troughs as
well as the time interval between the peak and trough, the "individual possibility region"
Pi is huge. On the other hand, when the particular ki time step selected correspond to the
rising and dropping region of the reduced basis output S$k(p), the "individual possibility
region" Pi is small. This is expected since the location of the rising and dropping region is
the distinct characteristic of the reduced basis output SN(p).
Therefore, when the total number of time steps k used for comparison are spaced equally
within the 500 time steps, it should not be of any surprise that when we increase the total
number of time steps KC from 4 to 9, the "possibility region" P shrink, as seen from figure
(6-3). This is because as more time steps are used, the more likely the rising and dropping
region is selected for comparison. Hence, we fixed the total number of time steps used for
comparison as AC = 9, equally spaced within the 500 time steps, since this will ensure that
at least 1 time step in the rising and dropping region will be sampled.
6.2.3
Measured Field Error
Lastly, the measured field error
Ski
is created from the reduced basis output Sk([)
specifying an arbitrary Sf% field error range; we create synthetical field data as
S(
1L)
.
by
Ski
We observed that the greater the measured field error Ekithe larger the
83
individual possibility region
time step selected for inverse problem
I
1.5
0 t
n
49-*-5-0--5- -R^
0.99
S t - 1.49
1
St = 2.49
0
0.5
"s
(1)
E 0.
C
=3
0
.)
0
0.
a0.7
0.6YVYAA4AA~~YV
-0.5
-1
D
-1.5-
0
v
0.
output
lower measured field error
upper measured field error
100
300
200
400
0.3
500
04
earthquake source
time step
possibility region
0.7
v actual system parameters
- possible region of system parameters
0.6 F
CD
C
0.5 F
0
0.40.30.3
0.4
0.5
0.6
0.7
earthquake source
Figure 6-2: Reduced basis output Spi) and measured field error Eki (left) as well as "individual possibility region" Pi for different ki time steps (right) and the "possibility region"
P (bottom).
84
possibility region
possibility region
0.7
Q,
0.7
0.6
0.6
CD
E
E
CD
C:
0.5
0.4
0.3
0.5
0.4
v actual system parameters
- possible region of system parameters
0.3
0.4
0.5
0.6
earthquake source
0.3 .
0.7
v
0.3
actual system parameters
possible region of system parameters
0.4
0.5
0.6
earthquake source
0.7
Figure 6-3: "Possibility region" P when total number of time steps used for comparison are
K = 4 (left) and K = 9 (right).
possibility region
0.7
a)
possibility region
v actual system parameters
possibility region of system parameters
0.7
0.6
0.6
CD
E
M)
C
v actual system parameters
possibility region of system parameters
E
0.5 F
0)
0.51
0.4-
0.4
0.3-
0.3
0.3
0.4
0.5
0.6
earthquake source
0.7
0.3
0.4
Figure 6-4: "Possibility region" P when the measured field error
(right) of the reduced basis output S_(IL).
85
0.5
0.6
earthquake source
gk'
0.7
is 20% (left) and 40%
"possibility region" 1. From figure (6-4), when we use a 20% field error range, the "possibility
region" P is smaller compared to a 40% field error range.
86
Chapter 7
Conclusion
7.1
Summary
The main aims of this thesis are to develop the reduced basis method, the offline-online
computational procedures and the corresponding a posteriori error estimation for the onedimensional seismic problem, a problem governed by the second order wave equation which
is hyperbolic and linear in nature. This is followed by applying them to the inverse problem.
We have shown that the reduced basis pressure distribution pF(xS) is an accurate approximation to the finite element pressure distribution Pk(x,) and the accuracy increases
as the dimension of the reduced basis space N increases. The offline-online computational
procedures work reasonably well although the convergence rate of the maximum norm of
the projection error lienIrImax in the training space Etrain as well as the maximum norm of
the reduced basis error |je||te,max in the test space -test is not as rapid as we expected. This
may be due to the nature of the finite element pressure solution Pk(x,), which is not smooth
enough across the earthquake source-time space: the finite element pressure distribution
along the edges of the earthquake source-time space are fairly "unique" and cannot be accurately represented as a linear combination of the existing basis vectors; hence, the greedy
algorithm has to bring these "unique" finite element pressure distribution into the reduced
basis space individually, accounting for the slow convergence rate.
87
Furthermore, the dimension of the reduced basis space N is found to be independent of
3 numerical parameters
#: the
dimension of the finite element space AJ, time step size At
and size of the training space -y, as they are refined. Lastly, as the dimension of the finite
element space X is comparable with the dimension of the reduced basis space N for the
one-dimensional seismic problem, the saving in computational cost when applying the online
stage instead of the finite element method is not experienced. We should expect the saving
in computational cost to be experienced in the two-dimensional seismic problem.
We developed the proposition for the a posteriori error estimation for the error bound
ANN(xs) and the output error bound Ai,N(xS). Results show that the maximum effectivity
has a magnitude of O(103) which increases rapidly when the tolerance E is lower.
However, this high value for effectivity kA(x,) is due to a low value for the norm of the reduced
7
7N,max
basis error Ilek(Xs)
ratio
N,max
1
and hence not a cause for concern. The maximum bound-maximum error
on the other hand, gives a constant magnitude of 0(102), showing that effectivity
21k(x,) does not blow up during a high value for the norm of the reduced basis error Iek(Xs) .
Similarly, the maximum output effectivity rlS,N,max and the maximum bound-maximum error
output ratio
S,N,max
have a magnitude of O(10)
and O(10' - 10)
extremely high value of the maximum output effectivity
7
S,N,max
respectively.
This
is due to an extremely
low value of the reduced basis output error es(x8 ) which has a magnitude close to machine
precision. Next, we show that the maximum effectivity
error ratio
N,max,
error output ratio
maximum output effectivity
S,N,max
rlN,max,
7S,N,max
maximum bound-maximum
and maximum bound-maximum
are independent of 3 numerical parameters
#: the
dimension of
the finite element space .A, time step size At and size of the training space -Y, as they are
refined. Lastly, it is found that the offline-online computational procedures break down when
the tolerance E is of magnitude O(10-6), where the maximum error bound difference
eA,max
is of magnitude 0(10-2). This is due to the square of the dual norm of the residuals having
values of magnitude 0(10-4) which is very close to machine precision.
Finally, the inverse problem works well, giving a "possibility region" P of system parameters p where the actual system parameters p* may be in. It is important to note that the
88
size of the inverse space
T
should be large enough such that the output error bound A N()
and the difference in reduced basis output Sk(g) between adjacent system parameters
ft
should be of the same magnitude. We further observed that the ki time steps selected for
comparison should have at least a time step that reflect the rising or dropping region of the
reduced basis output Sk(pt) in order to have a small "possibility region" P. Hence, the total
number of time steps for comparison is fixed as IC = 9. Lastly, the greater the measured
field error Ski, the larger the "possibility region" P we get.
7.2
Future Work
Presently, the thesis concentrates on the one-dimensional seismic problem which has a smooth
load function. Hence, the pressure distribution is smooth with respect to different nodal yposition, time t, earthquake source x, and occurring time T. The next emphasis could be
extending the reduced basis method to load functions which are non-smooth in nature.
7.2.1
Two-Dimensional Model Problem
In this thesis, the reduced basis method, the offline-online computational procedures and
the a posteriori error estimation are only applied to the one-dimensional seismic problem.
They can be extended to the two-dimensional seismic problem, where the dimension of the
finite element space iV in two-dimension will be the square of the present one-dimension.
The dimension of the reduced basis space N will be expected to increase but still has the
same magnitude. Hence, the saving in computational cost for the online stage compared to
the finite element method will be significant.
To verified this, a two-dimensional model problem is solved. The spatial domain is unit
length by unit length and the governing equation is
utt(x1, x2, t;
) -
rnUx(x1, x2, t; /)
89
=
0,
(7.1)
where K = 1 in the first half of the spatial domain [0.0, 0.5] x [0.0, 1.0] and r = P in the second
half of the spatial domain [0.5, 1.0] x [0.0, 1.0]. We shall permit this single system parameter
1
p to vary within the system parameter domain D = [0.3, 4.0] c R . Dirichlet boundary
conditions are applied along X2 = 0 and X2 = 1 while periodic boundary conditions are
applied along x 1 = 0 and x 1 = 1. The governing equation is transformed into the weak form
and marched forward in time using the Newmark scheme with the zero and first time steps
following a distribution of
O(XiX
2
; P)
=
ul(Xi, X2 ; P) = 4x 1 (1 - xi)e-
0.2
cos(2irX2 ).
(7.2)
The reduced basis method, the offline-online computational procedures and the associated a posteriori error estimation are applied to the two-dimensional model problem using
numerical parameters <3 = {.A = 3.98 x 104 , At
=
0.01, y = 8, E = 10-6}. The dimension of
the reduced basis space is N = 267. Comparing the time taken between the finite element
method and the online stage, we observed that the online stage is about 62.2 times faster
than the finite element method.
7.2.2
Modifications to the Greedy Algorithm
Next, the selection of basis vectors by the present greedy algorithm involves very high computational cost. The next basis vector selected corresponds to the maximum norm of the
projection error len||max within the training space Etrain. The greedy algorithm can be
modified to cut down on computational cost.
The main modification breaks up the basis vector selection into 2 stages (stage a and
stage 3) with the following procedures:
Stage oz:
Step 1. The first earthquake source-time space is defined as the earthquake source x, = 0.50
90
at all time steps while the first basis vector pki (x8s) is still fixed as the finite element pressure
distribution Pk(x,) at the last time step t = KAt, corresponding to the earthquake source
x, = 0.50.
Step 2. Modified Gram-Schmidt orthogonalization is performed using equations (4.2), (4.3)
and (4.4).
Step 3. Equation (4.8) is solved for all time steps in the earthquake source-time space to
yield the reduced basis coefficients Pkv(X,), which is substituted into equation (4.7) to form
the reduced basis pressure distribution Pk (X,).
Step 4. Determine the norm of the reduced basis error !Iek(xs)
and projection error j
)
from equations (4.14) and (4.19) respectively, for all time steps in the earthquake source-time
space; from which we obtain the maximum norm of the reduced basis error and projection
error in the earthquake source-time space.
Step 5. If the maximum norm of the reduced basis error in the earthquake source-time space
is less than the tolerance e specified, proceeds to stage 4.
Else, the finite element pressure
distribution Pk(x8 ) that corresponds to the maximum norm of the projection error in the
earthquake source-time space will be the next basis vector and steps 2 to 4 of stage a are
repeated.
Stage 3:
Step 1. Determine the norm of the reduced basis error flek(X 8 ) | and projection error Iek(X,)|
from equations (4.14) and (4.19) respectively, for all values of the earthquake source x, and
time steps in the training space
reduced basis error
I|e|tr,max
Btran;
from which we obtain the maximum norm of the
and projection error |ler|max.
Step 2. If the maximum norm of the reduced basis error |le||tr,max is less than the tolerance
e specified, the greedy algorithm terminates. Else, the finite element pressure distribution
Pk(X8 ) that corresponds to the maximum norm of the projection error |erllmax
will be the
91
next basis vector and its corresponding earthquake source x, will form the new earthquake
source-time space. We then repeat steps 2 to 4 of stage oz.
The advantage of this modification is that other than the few instances where stage / is
called, each basis vector selected only involve the calculation of the norm of reduced basis
error jIek(x,)
and projection error ek(x,)
instead of the training space
in that particular earthquake source-time space
-train.
Presenty, the next earthquake source x, to be subjected to stage oz is decided in stage 3
based on the maximum norm of the projection error llerdImax. 2 other minor variations are
also possible. We can base the selection of the earthquake source x, on the maximum norm
of the reduced basis error |le||tr,max or the maximum error bound AN,max. If the maximum
error bound AN,max is used, the greedy algorithm will terminate when the maximum error
bound AN,max is lower than the modified tolerance. The modified tolerance is the product of
a multiplier and the tolerance e. The multiplier should have an order of magnitude similar
to the maximum bound-maximum error ratio
N,max-
It is expected that applying the modified greedy algorithm instead of the present greedy
algorithm will significantly lower the computational cost, but at the expense of a slight
increase in the dimension of the reduced basis space N. However, it is not clear which of
the 3 different minor variations (determining the next earthquake source x, to be subjected
to stage oz based on the maximum norm of the projection error lerilmax, maximum norm
of the reduced basis error lie
Itr,max
or maximum error bound AN,max) will result in a lower
computational cost. They are not expected to differ greatly in computational cost for the
one-dimensional seismic problem due to the dimension of the finite element space AV and the
dimension of the reduced basis space N having the same order of magnitude. Their relative
performance may be better compared in the two-dimensional seismic problem.
92
Bibliography
[1] B. 0. Almroth, P. Stern, and F. A. Brogan. Automatic choice of global shape functions
in structural analysis. AIAA Journal,16:525-528, May 1978.
[2] A. K. Noor and J. M. Peters. Reduced basis technique for nonlinear analysis of structures. AIAA Journal, 18(4):455-462, April 1980.
[3] E. Balmes. Parametric families of reduced finite element models: Theory and applications. Mechanical Systems and Signal Processing, 10(4):381-394, 1996.
[4] J. P. Fink and W. C. Rheinboldt. On the error behavior of the reduced basis technique
for nonlinear finite element approximations. Z. Angew. Math. Mech., 63:21-28, 1983.
[5] T. A. Porsching. Estimation of the error in the reduced basis method solution of nonlinear equations. Mathematics of Computation, 45(172):487-496, October 1985.
[6] W. C. Rheinboldt. On the theory and error estimation of the reduced basis method
for multi-parameter problems. Nonlinear Analysis, Theory, Methods and Applications,
21(11):849-858, 1993.
[7] M. D. Gunzburger. Finite Element Methods for Viscous Incompressible Flows: A Guide
to Theory, Practice, and Algorithms. Academic Press, Boston, 1989.
[8] K. Ito and S. S. Ravindran. A reduced-order method for simulation and control of fluid
flows. Journal of Computational Physics, 143(2):403-425, July 1998.
93
[9] J. S. Peterson. The reduced basis method for incompressible viscous flow calculations.
SIAM J. Sci. Stat. Comput., 10(4):777-786, July 1989.
[10] C. Prud'homme, D. Rovas, K. Veroy, Y. Maday, A.T. Patera, and G. Turinici. Reliable
real-time solution of parametrized partial differential equations: Reduced-basis output
bounds methods. Journal of Fluids Engineering, 124(1):70-80, Mar 2002.
[11] Y. Maday, A.T. Patera, and G. Turinici. Global a priori convergence theory for reducedbasis approximation of single parameter symmetric coercive elliptic partial differential
equations. C. R. Acad. Sci. Paris, Serie I, 335(3):289-294, 2002.
[12] Martin A. Grepl.
Reduced-Basis Approximation and A Posteriori Error Estimation
for Parabolic Partial Differential Equations. PhD thesis, Massachusetts Institute of
Technology, 2005.
[13] K. Veroy.
Reduced Basis Methods Applied to Problems in Elasticity: Analysis and
Applications. PhD thesis, Massachusetts Institute of Technology, 2003.
[14] Karen Veroy, Christophe Prudhomme, and Anthony T. Patera. Reduced-basis approximation of the viscous burgers equation: Rigorous a posteriori error bounds. C. R. Acad.
Sci. Paris, Sirie I, 337(9):619-624, 2003.
[15] Jessica Marshall. Will San Francisco survive its next big quake? New Scientist, 2547,
April 2006.
[16] Hesheng Bao, Jacobo Bielak,
Omar Ghattas, Loukas F. Kallivokas, David R.
O'Hallaron, Jonathan R. Shewchuk, and Jifeng Xu. Large-scale simulation of elastic
wave propagation in heterogeneous media on parallel computers. Computer Methods in
Applied Mechanics and Engineering, 152(1-2):85-102, January 1998.
[17] Hesheng Bao, Jacobo Bielak, Omar Ghattas, David R. O'Hallaron, Loukas F. Kallivokas, Jonathan Richard Shewchuk, and Jifeng Xu. Earthquake ground motion modeling on parallel computers. In Supercomputing '96, Pittsburgh, Pennsylvania, November
1996.
94
[18] Jacobo Bielak, Yoshiaki Hisada, Hesheng Bao, Jifeng Xu, and Omar Ghattas. One- vs
two- or three-dimensional effects in sedimentary valleys. In Proceedings of 12th World
Conference on Earthquake Engineering, Aukland, New Zealand, 2000.
[19] Volkan Akcelik, Jacobo Bielak, George Biros, Ioannis Epanomeritakis, Antonio Fernandez, Omar Ghattas, Eui Joong Kim, Julio Lopez, David O'Hallaron, Tiankai Tu, and
John Urbanic. High resolution forward and inverse earthquake modeling on terasacale
computers. In Proceedings of SC2003, Phoenix, AZ, November 2003.
[20] Eugene Butkov. In Mathematical Physics. Addison-Wesley Publishing Company, 1968.
[21] N. C. Nguyen, K. Veroy, and A. T. Patera. Certified real-time solution of parametrized
partial differential equations. In S. Yip, editor, Handbook of Materials Modeling, pages
1523-1558. Springer, 2005.
95