Monte Carlo and Thermal Hydraulic Coupling using Low-Order Nonlinear Diffusion Acceleration
advertisement

Monte Carlo and Thermal Hydraulic Coupling using
Low-Order Nonlinear Diffusion Acceleration
by
Bryan Robert Herman
S.M., Nuclear Science and Engineering, 2011
Massachusetts Institute of Technology
B.S., Nuclear and Mechanical Engineering, 2009
Rensselaer Polytechnic Institute
Submitted to the Department of Nuclear Science and Engineering
in Partial Fulfillment of the Requirements for the Degree of
Doctor of Science in Nuclear Science and Engineering
at the
Massachusetts Institute of Technology
September 2014
©2014 Massachusetts Institute of Technology. All rights reserved.
Author
Department of Nuclear Science and Engineering
July 18, 2014
Certified by
Kord S. Smith, Ph.D.
KEPCO Professor of the Practice of Nuclear Science and Engineering
Thesis Supervisor
Certified by
Benoit Forget, Ph.D.
Associate Professor of Nuclear Science and Engineering
Thesis Supervisor
Accepted by
Mujid S. Kazimi, Ph.D.
TEPCO Professor of Nuclear Engineering
Chairman, Department Committee on Graduate Students
2
Monte Carlo and Thermal Hydraulic Coupling using Low-Order Nonlinear
Diffusion Acceleration
by
Bryan Robert Herman
Submitted to the Department of Nuclear Science and Engineering
on July 18, 2014, in Partial Fulfillment of the
Requirements for the Degree of
Doctor of Science in Nuclear Science and Engineering
Abstract
Monte Carlo (MC) methods for reactor analysis are most often employed as a benchmark tool for other transport and diffusion methods. In this work, we identify and
resolve a few of the issues associated with using MC as a reactor design tool. It is
widely thought that MC tallies converge at an ideal rate proportional to the inverse of
the square root of the number of tally batches. This is true only if tally batches are independent from one another. For a high dominance ratio light water reactor such as the
BEAVRS model, significant correlation is present and the convergence rate was much
slower. This work developed a means for analytically predicting tally convergence
rates when batches are correlated. Analyses supported these findings and confirmed
less than ideal convergence rates. For highly correlated problems, it is recommended
to reduce error by running additional independent simulations, rather than increasing
the number of neutrons in each individual simulation through additional batches.
Before tallies can be accumulated, the fission source must be stationary. For the
BEAVRS model, this took approximately 200 fission source generations. This process
can be accelerated by using coarse mesh finite difference (CMFD), a nonlinear diffusion acceleration method. CMFD was implemented in the continuous-energy MC
code OpenMC. When employing this technique, the number of inactive generations
was reduced by a factor of 10.
Realistic reactor calculations also require thermal hydraulic (TH) feedback which
was integrated into the source convergence process. The use of CMFD in addition to
TH reduced the number of fission source generations by a factor of 3. Further reduction was achieved by performing nonlinear iterations between the low-order CMFD
operator and TH model. Support vector regression, a machine learning algorithm,
was used to construct coolant density and fuel temperature dependencies of diffusion
parameters between each TH update using MC tallies. A framework was introduced
to obtain relative pin power distributions with 95% confidence intervals to 1% with
continuous-energy Monte Carlo coupled to thermal hydraulics using low-order CMFD
iterations.
Thesis Supervisor: Kord S. Smith
Title: Professor of the Practice of Nuclear Science and Engineering
Thesis Supervisor: Benoit Forget
Title: Associate Professor of Nuclear Science and Engineering
3
4
ACKNOWLEDGMENTS
This research was performed under appointment to the Rickover Fellowship Program
in Nuclear Engineering sponsored by Naval Reactors Division of the U.S. Department
of Energy. This research used resources of the Oak Ridge Leadership Computing Facility at the Oak Ridge National Laboratory, which is supported by the Office of Science
of the U.S. Department of Energy under Contract No. DE-AC05-00OR22725.
I owe my deepest gratitude to my thesis co-advisor, Professor Kord Smith. Learning
from and working with him over the past three years has been an enriching experience.
Discussions with him about light water reactor design methods have been especially
illuminating.
I would like to express my sincere appreciation to my other thesis co-advisor, Professor
Benoit Forget. Without his guidance throughout my tenure at MIT, this thesis would
not have been possible. He has taught me a wealth of information both inside and
outside the classroom.
I am especially grateful to my Rickover Fellowship mentor, Brian Aviles. He has been
providing me with invaluable advice since I was an undergraduate and sparked my
interest in the field of neutronics and thermal hydraulic coupling. Working with him
over the years has been a delightful experience, and I look forward to being his colleague at Bechtel Marine Propulsion Corporation.
I would particularly like to thank Paul Romano for his writing of and assistance with
the OpenMC code. Because of his efforts in developing this code and making it extensible to future applications, I was able to effectively perform my research using
OpenMC.
I would like to extend a special thanks to Daniel Kelly, Thomas Sutton, Brett Siebert
and Robert Wall at Knolls Atomic Power Laboratory. It has been a pleasure working
with Daniel Kelly to learn how to perform commercial light water reactor analysis
using Monte Carlo methods. Thomas Sutton has provided valuable insight and helped
me interpret results along the way. I would like to thank Brett Siebert for his help
and discussions relating to thermal hydraulics. Finally, Robert Wall has been a great
supporting manager during my summers at Knolls Atomic Power Laboratory. I look
forward to working with all of them in the near future.
I would also like to acknowledge all my friends at MIT, RPI, in the nuclear community
and from home. All of our discussions about academics and life have meant a lot to
me.
Without the love of my family, I would not be who I am today. My parents and brother
have always encouraged and supported me as I follow my dreams. Finally, I would
like to recognize my fiancée Lindsey Badanjak. She has been a part of my life since
the beginning of this work. Without her love and support this would not have been
possible.
5
6
CONTENTS
1
introduction
1.1 Background . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.2 Literature Review . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.3 Objectives of Thesis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
15
15
19
19
2
monte carlo eigenvalue simulations
2.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.2 OpenMC Neutron Transport Code . . . . . . . . . . . . . . . . . . . . . .
2.2.1 Tally System . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.3 MIT BEAVRS Benchmark . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.4 Fission Source Generations . . . . . . . . . . . . . . . . . . . . . . . . . .
2.5 Tally Batches . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2.5.1 Correlated Statistics and Variance of the Mean . . . . . . . . . . .
2.5.1.1 Expected RMS Error from a Single Simulation . . . . .
2.5.1.2 Expected RMS Error from Mean of Separate Simulations
2.5.2 Effect of Tally Batch Correlation . . . . . . . . . . . . . . . . . . .
2.5.2.1 Reference Fission Source Distributions . . . . . . . . . .
2.5.2.2 Tally Convergence Results . . . . . . . . . . . . . . . . .
2.5.2.3 Autocorrelation Coefficients for 3-D BEAVRS . . . . . .
2.5.2.4 Fixed Source Simulations . . . . . . . . . . . . . . . . . .
21
21
23
23
24
25
29
30
33
34
37
37
38
44
46
3
nonlinear diffusion acceleration
3.1 Notation . . . . . . . . . . . . . . . . . . . . . . . .
3.2 Theory . . . . . . . . . . . . . . . . . . . . . . . . .
3.2.1 Calculation of Macroscopic Cross Sections
3.2.2 CMFD Equations . . . . . . . . . . . . . . .
3.2.3 CMFD Feedback . . . . . . . . . . . . . . .
3.3 Implementation in OpenMC . . . . . . . . . . . . .
3.4 Toy Problem Example . . . . . . . . . . . . . . . .
50
50
50
52
53
55
56
60
4
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
reactor simulations using nda
4.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.2 Initial CMFD Source Distribution . . . . . . . . . . . . . . . . . . . . . . .
4.3 Biased CMFD Tallies . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.3.1 Tracklength vs. Analog Tallies . . . . . . . . . . . . . . . . . . . .
4.3.2 CMFD Tally Resets . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.3.3 Moving Window CMFD Tally Resets . . . . . . . . . . . . . . . .
4.4 Effective Down-scatter Cross Section . . . . . . . . . . . . . . . . . . . . .
4.5 Spatial Mesh . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.6 Energy Mesh . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.7 Diffusion Coefficient . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4.7.1 Derivation of Hydrogen In-scatter Correction . . . . . . . . . . .
4.7.1.1 Hydrogen In-scatter Correction Curve using Monte Carlo
7
64
64
64
65
68
71
71
75
77
77
79
83
85
4.7.1.2 Hydrogen In-scatter Correction Curve using P1 Theory
4.7.2 Effect of Diffusion Coefficient on CMFD . . . . . . . . . . . . . .
4.8 3-D CMFD Acceleration of BEAVRS . . . . . . . . . . . . . . . . . . . . .
4.9 Tally Correlation with CMFD Feedback . . . . . . . . . . . . . . . . . . .
4.10 Higher Harmonics and Adjoint with CMFD . . . . . . . . . . . . . . . .
5
6
87
90
94
95
96
thermal hydraulic feedback
5.1 Thermal Hydraulic Equations . . . . . . .
5.2 Neutronic and Thermal Feedback . . . .
5.2.1 Coupling Methods . . . . . . . . .
5.3 Multipole Temperature Feedback . . . . .
5.4 Support Vector Regression . . . . . . . . .
5.4.1 Support Vector Regression Testing
5.5 Feedback Results with 2-D BEAVRS . . .
5.6 BEAVRS 3-D Simulations . . . . . . . . .
5.6.1 HFP Reactor Analysis . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
103
103
105
106
109
111
115
119
125
128
conclusions
6.1 Summary of Work . . . . . . .
6.2 Contributions . . . . . . . . . .
6.3 Future Work . . . . . . . . . . .
6.3.1 Tally Convergence . . .
6.3.2 Acceleration Operators
6.3.3 Machine Learning . . .
6.3.4 Thermal Feedback . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
135
135
140
141
141
141
141
142
.
.
.
.
.
.
.
.
.
.
.
.
.
.
bibliography
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
143
8
LIST OF FIGURES
Figure 1.1
Figure 2.1
Figure 2.2
Figure 2.3
Figure 2.4
Figure 2.5
Figure 2.6
Figure 2.7
Figure 2.8
Figure 2.9
Figure 2.10
Figure 2.11
Figure 2.12
Figure 2.13
Figure 2.14
Figure 2.15
Figure 2.16
Figure 3.1
Figure 3.2
Figure 3.3
Figure 3.4
Figure 3.5
Figure 4.1
Figure 4.2
Figure 4.3
Figure 4.4
Current deterministic multi-level approach to reactor analysis. .
MC neutron transport procedure. . . . . . . . . . . . . . . . . . .
Layout of radial and axial BEAVRS reactor. . . . . . . . . . . . .
MC fission source iteration procedure. . . . . . . . . . . . . . . .
Convergence of MC source distribution for various number of
neutrons simulated in an FSG for 2-D BEAVRS model. . . . . .
Source convergence comparison between 2-D and 3-D BEAVRS.
BEAVRS 3-D source convergence comparison with different numbers of neutrons simulated per FSG. . . . . . . . . . . . . . . . .
Normalized 2-D BEAVRS reference nu-fission reaction rates. . .
Relative sample standard deviation based on normalized 2-D
BEAVRS reference nu-fission reaction rates. . . . . . . . . . . . .
OpenMC RMS convergence of spatial nu-fission rate analog tallies for 10 independent simulations of the 2-D BEAVRS model.
Effect of number of neutrons simulated in a tally batch on RMS
convergence for the 2-D BEAVRS model. . . . . . . . . . . . . .
Lag-k correlation coefficients of the 2-D BEAVRS model with
different numbers of tally realizations. . . . . . . . . . . . . . . .
Correlogram of the first 100 lag autocorrelation coefficients using the 2-D BEAVRS model. . . . . . . . . . . . . . . . . . . . . .
Theoretical prediction of expected RMS using autocorrelation
coefficients for an assembly mesh on the 2-D BEAVRS model. .
Spatially-averaged autocorrelation coefficients for an assembly
mesh fission source tally over 3-D BEAVRS core. . . . . . . . . .
RMS error for constant source bank after inactive FSGs for the
2-D BEAVRS model. . . . . . . . . . . . . . . . . . . . . . . . . . .
RMS error for constant source bank with factor of 100 less neutrons simulated per tally batch on the 2-D BEAVRS model. . . .
Flow chart of NDA process. . . . . . . . . . . . . . . . . . . . . .
Diagram of CMFD acceleration mesh. . . . . . . . . . . . . . . .
Sparsity of CMFD matrices. . . . . . . . . . . . . . . . . . . . . .
Source convergence comparison for 1-D slab toy problem. . . .
Comparison of OpenMC and CMFD source distributions at various FSGs. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
CMFD fission source using initial uniform box source on the
2-D BEAVRS model. . . . . . . . . . . . . . . . . . . . . . . . . . .
CMFD fission source using initial uniform source only in fissionable materials on the 2-D BEAVRS model. . . . . . . . . . .
Convergence of fission source iterations using tracklength tallies on the 2-D BEAVRS model. . . . . . . . . . . . . . . . . . . .
Convergence of fission source iterations using analog tallies on
the 2-D BEAVRS model. . . . . . . . . . . . . . . . . . . . . . . .
9
16
21
24
26
27
28
29
39
40
41
43
44
45
46
47
48
48
52
57
59
61
62
66
67
69
70
Figure 4.5
Figure 4.6
Figure 4.7
Figure 4.8
Figure 4.9
Figure 4.10
Figure 4.11
Figure 4.12
Figure 4.13
Figure 4.14
Figure 4.15
Figure 4.16
Figure 4.17
Figure 4.18
Figure 4.19
Figure 4.20
Figure 4.21
Figure 4.22
Figure 4.23
Figure 4.24
Figure 4.25
Figure 4.26
Figure 4.27
Figure 4.28
Figure 4.29
Figure 5.1
Figure 5.2
Figure 5.3
Convergence of fission source iterations when resetting CMFD
tallies at specific batches on the 2-D BEAVRS model. . . . . . . 72
Convergence of fission source iterations when resetting CMFD
tallies using a moving window on the 2-D BEAVRS model. . . . 74
CMFD convergence results using effective downscatter cross
section instead of full scattering matrix on the 2-D BEAVRS
model. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
Comparison of CMFD acceleration using the 2-D BEAVRS model
for different spatial meshes. . . . . . . . . . . . . . . . . . . . . . 78
Comparison of CMFD acceleration for different numbers of energy groups on the 2-D BEAVRS model. . . . . . . . . . . . . . . 80
Comparison of in-scatter transport to total cross section with
out-scatter approximation. . . . . . . . . . . . . . . . . . . . . . . 84
Comparison of flux and current spectra tallied from 1-D hydrogen slab simulation. . . . . . . . . . . . . . . . . . . . . . . . . . . 86
Comparison of 70 group normalized spatial flux distributions
over inner tally region of a hydrogen slab. . . . . . . . . . . . . . 86
Transport-to-total ratio generated from Monte Carlo. . . . . . . 87
Transport-to-total ratio generated from P1 theory. . . . . . . . . 89
Comparison of transport-to-total ratio with current spectrum. . 89
CMFD acceleration with different diffusion coefficient definitions on the 2-D BEAVRS model. . . . . . . . . . . . . . . . . . . 91
Map of fast diffusion coefficients assuming isotropic scattering. 92
Map of fast diffusion coefficients calculated from fast transport
cross section. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93
Map of fast diffusion coefficients collapsed from a fine distribution of diffusion coefficients. . . . . . . . . . . . . . . . . . . . . . 93
CMFD acceleration of 3-D BEAVRS core. . . . . . . . . . . . . . 94
Comparison of CMFD acceleration for different numbers of
neutrons per FSG on the 3-D BEAVRS model. . . . . . . . . . . . 95
Autocorrelation coefficients with CMFD present during tally
batches on the 2-D BEAVRS model. . . . . . . . . . . . . . . . . . 96
RMS convergence of fission source with CMFD present during
tally batches on the 2-D BEAVRS model. . . . . . . . . . . . . . . 97
Fast flux harmonics from 2-D BEAVRS. . . . . . . . . . . . . . . 98
Thermal flux harmonics from 2-D BEAVRS. . . . . . . . . . . . . 99
Fast and thermal forward flux distributions of BEAVRS 2-D core. 100
Fast and thermal adjoint flux distributions of BEAVRS 2-D core. 100
Source error reduction during power iterations. . . . . . . . . . 101
Convergence of dominance ratio using CMFD for the 2-D BEAVRS
model. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101
Diagram of TH axial discretization. . . . . . . . . . . . . . . . . . 104
Coupling method (a) - conventional MC-TH coupling. . . . . . 107
Coupling method (b) - MC-TH coupling applied during fission
source iterations. . . . . . . . . . . . . . . . . . . . . . . . . . . . 108
10
Figure 5.4
Figure 5.5
Figure 5.6
Figure 5.7
Figure 5.8
Figure 5.9
Figure 5.10
Figure 5.11
Figure 5.12
Figure 5.13
Figure 5.14
Figure 5.15
Figure 5.16
Figure 5.17
Figure 5.18
Figure 5.19
Figure 5.20
Figure 5.21
Figure 5.22
Figure 5.23
Figure 5.24
Figure 5.25
Figure 5.26
Coupling method (c) - new coupling method where low-order
CMFD-TH iterations are converged between MC fission source
iterations. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 108
Relative percent error between conventional ACE cross sections
and multipole representation method at 900K. . . . . . . . . . . 110
Comparison of fuel temperature effects (relative percent difference) not captured by multipole method outside of resonance
range. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111
e-insensitive band in linear SVR [50]. . . . . . . . . . . . . . . . . 113
Training and prediction data for coolant density regression of
effective down-scatter cross section. . . . . . . . . . . . . . . . . 116
Training and prediction of effective down-scatter cross section
of 1.6% enriched assemblies. . . . . . . . . . . . . . . . . . . . . . 117
Training and prediction data for fuel temperature regression of
fast absorption cross section. . . . . . . . . . . . . . . . . . . . . . 118
Training and prediction data for fuel temperature and coolant
density regression of fast absorption cross section of 1.6% assembly. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 118
Source convergence of the BEAVRS 2-D model using coupling
method (a). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 120
Assembly-averaged spatial distributions of coolant density and
fuel temperature using coupling method (a) on the 2-D BEAVRS
model. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121
Comparison of coupling methods (a) and (b) for 2-D BEAVRS
model. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121
Comparison of source convergence when TH feedback begins
at different batches for coupling method (b) using the 2-D BEAVRS
model. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122
Comparison of spatial distributions of TH parameters between
coupling method (a) and (b). . . . . . . . . . . . . . . . . . . . . 123
Convergence of core-averaged TH parameters for the 2-D BEAVRS
model. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 124
Comparison of TH coupling methods (b) and (c) for the 2-D
BEAVRS model. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 125
Comparison of coupling methods for the 3-D BEAVRS model. . 126
Coarse mesh assembly-averaged coolant density distribution. . 127
Comparison of axially-integrated radial relative power distributions of the 2-D BEAVRS model. . . . . . . . . . . . . . . . . . 129
Comparison of axial relative power distributions. . . . . . . . . 130
Comparison of source convergence for assembly-wise SVR training on the 3-D BEAVRS model. . . . . . . . . . . . . . . . . . . . 130
Comparison of Shannon entropy convergence for 10 separate
simulations. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 131
Pin tally data from hot full power analyses. . . . . . . . . . . . . 132
Distribution of 95% confidence intervals for mean axially-integrated
relative pin powers for updated and fixed fission sources. . . . 133
11
Figure 5.27
Difference of mean axially-integrated relative pin powers between updated and fixed fission source . . . . . . . . . . . . . . 133
12
L I S T O F TA B L E S
Table 1.1
Table 3.1
Table 3.2
Table 4.1
Table 5.1
Table 5.2
Pros and cons of reactor analysis methods. . . . . . . . . . . . .
OpenMC CMFD tally list. . . . . . . . . . . . . . . . . . . . . . .
Input data for 1-D slab toy problem. . . . . . . . . . . . . . . . .
CMFD energy group structures. . . . . . . . . . . . . . . . . . . .
Material properties and operating conditions used in TH model.
Simulation parameters for SVR tests. . . . . . . . . . . . . . . . .
13
18
58
61
77
105
116
ACRONYMS
ACC Autocorrelation Coefficient
BEAVRS Benchmark for Evaluation and Validation of Reactor Simulations
BP
Burnable Poison
CMFD Coarse Mesh Finite Difference
FSG Fission Source Generation
HFP Hot Full Power
HZP Hot Zero Power
LWR Light Water Reactor
MC
Monte Carlo
NDA Nonlinear Diffusion Acceleration
OpenMC Open Monte Carlo
PWR Pressurized Water Reactor
RMS Root Mean Square
SVM Support Vector Machine
SVR Support Vector Regression
TH
Thermal Hydraulic
14
1
INTRODUCTION
1.1
background
One of the many components in the design of any nuclear reactor core is the prediction of spatial power distributions. It is very important to predict the power produced in every pellet of a nuclear reactor with accuracy because it interacts with many
other processes. One important interaction is Thermal Hydraulic (TH) analysis, where
power distributions predicted by neutronic codes are coupled to heat transfer and
fluid mechanics models to predict how heat is extracted from the reactor core and to
ensure that no material temperature limits are exceeded. Another example is fuel management where the life of the core is predicted and isotopic inventories are calculated
to optimize economics and design safe storage facilities.
The current production design methodology for calculating power distributions for
Light Water Reactors (LWRs) is illustrated in fig. 1.1. At the start of this procedure,
point-wise isotopic cross sections in energy are pre-processed through a code such
as NJOY to produce multigroup cross sections in hundreds of energy groups [1].
During this process, each isotope is usually processed separately in an assumed infinite medium with a background scattering contribution for a given temperature. The
goal is to reduce the energy grid of cross sections into something manageable while
still capturing important energy self-shielding effects. Once these calculations are performed for each isotope at multiple temperatures and different levels of background
scattering, problem-dependent geometry such as pin-cells can be analyzed to capture
spatial self-shielding effects as shown by the first picture in fig. 1.1. Cross sections are
reduced to approximately one hundred energy groups, but are now specific for each
pin-cell type in a lattice. During the lattice physics stage of the calculation, 2-D deterministic transport methods are used to generate few-group spatially-homogenized
macroscopic cross sections for coarse mesh diffusion theory analysis. For LWRs specifically, it is usually assumed that lattices can be decoupled from the full core and analyzed separately. One popular lattice physics code, CASMO, uses the method of characteristics to solve the neutron transport equation [2]. At this stage in the procedure,
assembly-averaged few-group cross section sets are generated for various combinations of TH and operating conditions. Because homogenized neutronic parameters
strongly depend on TH conditions, that are still unknown, a wide array of conditions
are simulated. Once a library of homogenized parameters has been generated, they
can be interpolated during full core analyses.
15
Figure 1.1. Current deterministic multi-level approach to reactor analysis.
At the full core analysis stage, microscopic cross sections that were once very detailed in energy have been reduced to few-group macroscopic cross sections that are
problem-dependent. Because spatial homogenization was performed during the lattice physics stage, full core spatial detail is reduced to assembly or quarter assembly
blocks. Full core analyses are commonly performed using few-group nodal diffusion
methods such as the analytic nodal method or nodal expansion method [3]. It is necessary to couple coarse mesh TH equations with neutron diffusion physics to achieve
a spatial power distribution. As diffusion equations are solved, parameters that were
generated from a wide array of TH conditions can be interpolated to be consistent
with a specific TH distribution. This process is performed in reactor analysis codes
such as SIMULATE [4]. This type of procedure for LWR analyses has been successful
in obtaining accurate power distributions. They can routinely achieve 1% Root Mean
Square (RMS) error on assembly power distribution utilizing a modest amount of
computing time and memory.
There are some issues in the current production methods that need to be addressed
in future reactor analysis tools. The first is that analysis procedures are reactor-type
dependent meaning that data generated for a specific LWR type cannot be used for
fast reactors or even between different types of LWRs. The LWR methodology requires
many different approximations (e.g., spectral corrections, discontinuity factors, spatial
rehomogenization, etc.) to incorporate necessary physics at each step of the process,
making it difficult to extend it to different situations. In LWR methods especially, once
lattices are spatially homogenized, the true fine mesh answer can never be obtained.
Performing mesh refinement will only converge to the effective homogenized solution.
In order to reconstruct local information such as pin powers, reconstruction methods
are required. As we look toward the future in reactor analysis tools, we desire methods that resolve both neutron and thermal hydraulic physics on a fine mesh with
higher fidelity to predict localized effects such as critical heat flux. This means that
16
the entire core should be analyzed at once and not treated in stages. There are two
classes of methods that are currently being pursued. The first is deterministic transport
methods that solve the neutron transport equation numerically. This usually involves
discretization of space, energy and angle dimensions. There are many types of deterministic methods such as discrete ordinates and the method of characteristics. The
other class of future methods for reactor analysis is Monte Carlo (MC) methods [5].
MC uses probability sampling to simulate a random neutron walk. At each collision,
probability distributions representing detailed interaction physics are sampled.
Table 1.1 compares current production tools (nodal methods) with the two classes
of future methods. The largest change from current methods is that the lattice calculation stage is removed. Few-group spatially homogenized parameters will no longer
be required because geometry will be treated as close to reality as possible. Thus, future methods need to be able to solve the neutron transport equation in hundreds
to thousands of energy groups. This is much easier to handle in MC methods because point-wise cross sections can be stored in memory during the calculation and
be fetched when needed. In deterministic methods, energy is more difficult to handle
because multigroup cross sections must be generated through some type of energy
condensation that takes self-shielding into account. Other than tallies for depletion
and feedback, MC methods treat the geometry almost exactly with no spatial discretization unlike in deterministic methods. A large difference between production
methods and future methods is the need to store results in every sector of a fuel pellet
which increases the memory requirements for these methods. This can be prohibitive
and thus requires data and domain decomposition [6, 7].
Although MC methods allow treatment of energy and spatial domains almost exactly, there are drawbacks to using this class of methods. The first is that convergence
is stochastic. This means that all results from MC have a mean and confidence interval. For reactor analysis, once a converged fission source has been obtained, more
neutrons need to be sampled in order to determine reaction rates and other quantities of interest. This requires many simulated neutrons in these calculations, and the
time it takes to achieve a solution can be very large. One encouraging point about MC
methods is that full core reactor simulations have been recently performed. This gives
us confidence in this class of methods for the near future [8, 9]. In working with any
of these future methods for reactor analysis, we must improve on the capability of
current production methods to justify increased computational costs.
For this thesis, we focus on MC methods coupled to TH equations and study their
capability to analyze LWRs. We only focus on this type of reactor because methods
to analyze these systems are well-understood and employed on a daily basis. However, these MC neutronic methods are reactor-agnostic. Specifically, we will study MC
capability for generating pin power distributions for a single state point with ther-
17
Table 1.1. Pros and cons of reactor analysis methods.
Production Tools
Hi-Fidelity Deterministic
Monte Carlo
Energy
multi-groupa
multi-group
continuous
Model
(e.g., 2-10 groups)
(100s-1000s groups)
energy
Spatial
homogenized
fine-mesh S N
physical plus
Model
assembly diffusion
(100 mesh/pin-cell)
depletion zones
synthesized
explicit
explicit
trivial
very difficult
CAD, physicalc
1000s of isolated
Fine mesh data
point-wise
lattice calculations
approximate BCs
data is relatively easy
~1.6 GB
~0.5 TB
~0.5 TB
Coarse mesh
Fine mesh
Fine mesh
easy
acceleration needed
stochastic
Pin powers
Mesh generation
Pre-process
data
Storageb
requirements
Source
Convergence
Current
status
acceleration needed
routine production
Solutions never achieved
50,000 core-hours
5 core-seconds
with resolved mesh
(without massive tallies)
a Note – Green: Positive attribute, Red: Negative attribute , Blue: In between
b Conservatively for a PWR: ~200 assemblies, ~300 pins/assembly, ~500 axial, ~10 rings, ~400 isotopes
(using single precision)
c No mesh needed for transport, only for tallies/depletion/feedback
mal hydraulic feedback. Three major components of the core analysis process will
not be studied as they are dependent on the capability of generating a single state
point of information: (1) integrated depletion methods, (2) equilibrium Xenon and (3)
transient methods. Depletion methods are very important to be able to calculate and
study the characteristics of a core throughout its life. Once a reactor is brought to
full power, reactivity is lost due to fission products like Xenon reaching equilibrium
concentrations. It is important to be able to compute these spatial equilibrium concentrations as they affect spatial power distributions and core multiplication factor.
Accident analyses and other operational anomalies calculated with transient methods
are essential for analyzing safety limits. Because MC methods are notorious for taking
a large computational time to solve, acceleration methods that are used in current core
analysis procedures have been recently adapted to MC methods. This thesis focuses
on Nonlinear Diffusion Acceleration (NDA) methods in the framework of MC for TH
coupling. Specifically, we will study the Coarse Mesh Finite Difference (CMFD) diffusion acceleration method that has been used extensively in nodal codes. Integrating
18
different types of transport and/or diffusion methods are also referred to as hybrid
MC methods. Procedures discussed in this thesis will analyze full core neutronics using detailed geometry and continuous-energy representation of cross sections coupled
to TH equations. This does not require any additional work in processing multigroup
data or performing lattice calculations.
1.2
literature review
Recently, research has been performed in the area of hybrid MC transport for reactor
analysis [10, 11, 12]. The work of Willert showed he could achieve the same eigenvalue
and source distribution when applying NDA methods to few-group 1-D and 2-D classic benchmark problems [13, 14, 15]. His work focused primarily on the mathematics
involved in using NDA methods for these simple problems. His methods were not
applied in 3-D or in a continuous-energy general MC code.
In the work of Wolters, the focus was on different types of NDA formulations [16].
The purpose of investigating new formulations was to reduce sensitivities of NDA
equivalence parameters. Some of these new formulations yielded better results than
classical CMFD. Most of her conclusions were based on simplified 1-D, one energy
group problems and may not be applicable to more complex reactors. As the spatial
dimensions and energy range become more detailed, different convergence behavior
may be observed similar to what is found with classical CMFD methods.
We focus on reviewing the work of Lee in more detail in this section because he
studied NDA methods in the context of realistic LWR models. Lee performed the first
study applying CMFD acceleration to MC simulations of LWRs [17, 18, 19]. In his
work, he presented a derivation of CMFD acceleration equations as well as a framework for feeding back diffusion results to the MC fission source bank. He discussed
results for the effectiveness of CMFD on 1-D, 2-D and 3-D reactor problems using a
multigroup MC code. Finally, he presented work on coupling TH equations to the
MC simulation while incorporating CMFD acceleration. One major contribution in
this work is that he coupled TH equations to MC neutronics while the source is converging. Thus, when a fission source is converged in MC, it will be consistent with
neutronics and thermal hydraulics.
1.3
objectives of thesis
In this thesis, we build on Lee’s work for coupling MC neutronics and TH equations.
One of the major differences in the implementation of CMFD in this thesis is that
we are implementing it into an existing continuous-energy MC code. Compared with
the multigroup code that Lee used, continuous-energy codes use point-wise isotopic
19
microscopic cross sections and other physics parameters directly from ACE-formatted
files. Thus, resolved resonances are completely modeled in these codes which creates
more noise in the system and makes convergence more difficult.
Before studying fission source acceleration techniques in the context of TH coupling,
it is important to understand how fission sources and tallies converge in conventional
MC. A study of these two facets of MC simulations is discussed in chapter 2. The next
objective of this thesis is to discuss how to implement CMFD in the framework of a
continuous-energy MC code. This is discussed in chapter 3, which was written to be
an introductory chapter into CMFD acceleration. CMFD equations are derived and
implementation preferences into MC are discussed. Finally, a simple 1-D slab reactor
example is presented that highlights how effective CMFD can be.
Most of this thesis is devoted to performing CMFD on complex systems, not on
simple geometries and few energy groups. This acceleration method is studied in
many configurations of a realistic LWR model including mesh size studies, number
of neutrons simulated, etc. The goal is to determine the best running strategies when
performing acceleration. Most of the studies are performed on a 2-D radial core model.
However, 3-D results based on the best trends from 2-D analyses are also presented. In
particular, a detailed study of diffusion coefficients from MC tallies is discussed. These
are trivial in multigroup MC because they are supplied in the form of a transport
corrected macroscopic cross section at input. Results of these studies are discussed in
chapter 4.
Similar to Lee’s work, a TH coupling study is performed. This thesis extends Lee’s
work but takes a different approach when studying how to converge a fission source
distribution during an MC simulation. New methods include incorporating a new onthe-fly Doppler broadening feedback approach as well as a procedure for performing
low-order iterations between CMFD and thermal hydraulics using machine learning
techniques. These results are discussed in chapter 5.
20
2
M O N T E C A R L O E I G E N VA L U E S I M U L AT I O N S
2.1
introduction
MC solutions for steady-state full-core reactor analysis (an eigenvalue problem) have
been gaining popularity in the last decade. This class of methods involves solving
the Boltzmann equation that describes neutron transport via particle simulations. An
in-depth description of how the neutron transport equation is solved using MC can
be found in Romano [5]. When using MC, the life of individual neutron histories
is tracked throughout media as they collide with nuclides. The physics governing
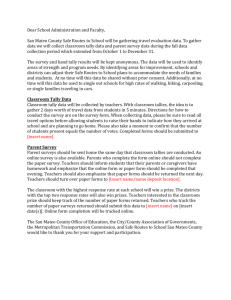
these processes are embedded in probability distributions. Figure 2.1 describes an MC
procedure.
Begin Batch i
yes → i = i + 1
Next Batch?
no
Begin FSG j
yes → j = j + 1
Next FSG?
no
Begin Particle k
yes → k = k + 1
Next Particle?
no
Transport Particle
Collision Physics
Still Alive?
yes
Figure 2.1. MC neutron transport procedure.
The particle transport loop is at the lowest level of this procedure. During this part,
a neutron is first started from a fission source site and transported to a collision site.
Transport physics is based on sampling free flight probability distribution character-
21
ized by the total macroscopic cross section of the medium. At the collision site, an
isotope is randomly sampled along with a collision reaction type. Once selected, collision physics are performed. If the neutron is still alive after performing these collision
physics, it is transported to the next collision site.
At the next level, a number of neutron histories can be simulated in a Fission Source
Generation (FSG). An FSG is analogous to a power iteration in deterministic eigenvalue problems. While individual neutrons are being simulated, fission source sites
are accumulated into a fission bank for the next FSG. After all neutrons have been
simulated, source sites in the fission bank are truncated or replicated to keep the
total number of source neutrons in the bank constant. As an alternative to this procedure, statistical weights of neutrons can be altered to conserve the total starting source
weight. After either of these steps, source sites left in the bank are then used as starting locations for neutrons during the next FSG. Because of this procedure, FSGs are
highly correlated to each other. The effect of this will be discussed in section 2.5.
At the highest level are tally batches. In order to obtain information about a simulation, tallies need to be accumulated. Some examples of these are fluxes, reaction
rates, surface currents, etc. When a tally batch is complete, tallies that were accumulated during FSGs are now used to update mean and variance parameters. Due to
high correlation between FSGs, variances calculated assuming independent sampling
laws may be inaccurate. Because it is difficult to measure correlation during a simulation and most codes assume that tally batches are independent, multiple FSGs can be
lumped into a tally batch to reduce correlation. This was shown to be effective in LWR
simulations performed by Kelly et al. where it was found that 50 FSGs achieved an apparent variance to within 99% of the true uncertainty [20]. A number of tally batches
are accumulated during the simulation to obtain tallies at a specific confidence interval.
Unlike deterministic methods, MC eigenvalue methods start tallying reaction rates
once the fission source is converged. In deterministic methods, once a fission source
is converged, it does not require any additional effort to compute reaction rates. We
classify MC eigenvalue calculations into two parts. The first consists of inactive batches,
where there is one inactive fission source generation in a tally batch. The latter part
of the simulation consists of active batches in which a user can configure the code
to perform multiple FSGs in a batch. A user has to specify the number of neutron
histories in an FSG, the number of FSGs in active batches and the number of inactive
batches to configure run parameters for an MC simulation.
22
2.2
openmc neutron transport code
The Open Monte Carlo (OpenMC) code is a continuous-energy MC tool developed in
2011 at MIT [21]. As the name suggests, it is open source and available in the public
domain. The main purpose for developing this new MC tool was to be a research platform for studying new algorithms. This thesis is an example of this purpose because
NDA algorithms were incorporated and studied using this code. In addition, OpenMC
was developed with the objective of simulating large reactors, such as LWRs, on high
performance computers and modern hardware architectures. This is important because it gives insight into the capabilities that MC codes will need to have when
compared to production deterministic codes. OpenMC was used for all analyses in
this thesis.
There are many reasons why OpenMC was chosen for this work. The main driver is
that this code was written in modern Fortran with modern coding practices. The code
is very readable and modifying the code is easy. OpenMC is parallelized with both
message passing interface and threading. The parallel fission bank algorithm used
to communicate source sites to different processors has shown to have almost ideal
scaling [22]. OpenMC was developed to accommodate the necessary tallies for NDA
in addition to having a generic efficient tally system. There is very little overhead
added to OpenMC once the tally system has been activated.
2.2.1 Tally System
It is worth discussing the tally system in OpenMC because it is the main connection
between NDA and MC. There are two tally estimators present in OpenMC: analog and
tracklength. Analog is the simplest tally estimator to implement because it only tallies
when a specific event happens. For example, if a fast neutron scattered, the neutron’s
weight would be tallied to the scattering bin that has an energy filter containing that
neutron’s energy before the collision. Compared to tracklength tallies, each bin has
fewer samples because scoring only occurs when that type of event happens.
The tracklength estimator uses the path length that the neutron travels when estimating tallies. The nice feature about this estimator is that contributions to all reaction
rate tally bins are produced each time a neutron is transported in the medium. The
path length can be the distance to next collision, distance to next material interface
or distance to the outer system boundary. This makes tally estimates more accurate,
but can slow the tally system because more reactions are being scored. Specifically
for NDA, tallies need to be scored on a mesh and post-collision information such as
energy and angle need to be available. This means that artificial collisions need to
be sampled for these types of tallies. For example, if the neutron was absorbed, no
23
post-collision scattering information would be available. Thus, an artificial scattering
collision is sampled to obtain this information for tallies. Both of these tally estimators
are compared when NDA results are presented in chapter 4.
2.3
mit beavrs benchmark
The reactor model used in simulations presented in this thesis is the MIT Benchmark
for Evaluation and Validation of Reactor Simulations (BEAVRS). This benchmark was
developed in 2013 to be a very detailed reactor challenge problem and is available
in the open literature [8]. The benchmark contains a detailed description of geometry
and materials for a Westinghouse 4-loop PWR. In addition, operational data, including
boron let-down curves and fission chamber detector data, are included for the first two
cycles of operation.
Core Barrel
Pressure Vessel
Neutron Shield Panel
Baffle
Highest Extent
Top of Upper Nozzle
Bottom of Upper Nozzle
Top of Fuel Rod
Bottom of Top End Plug
Grid 8 Top
Grid 8 Bottom
Control Rod Step 228
Top of Active Fuel
Grid 7 Top
Grid 7 Bottom
Grid 6 Top
Grid 6 Bottom
Grid 5 Top
Grid 5 Bottom
Grid 4 Top
Grid 4 Bottom
Grid 3 Top
Grid 3 Bottom
Grid 2 Top
Grid 2 Bottom
Control Rod Step 0
Grid 1 Top
Bot. of Burnable Absorbers
Grid 1 Bottom
Bottom of Active Fuel
Bottom of Fuel Rod
Bottom of Support Plate
Lowest Extent
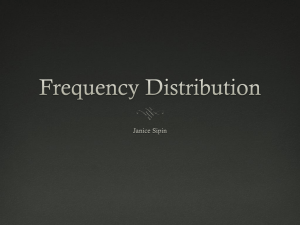
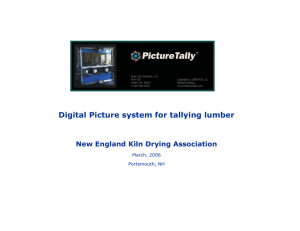
Figure 2.2. Layout of radial and axial BEAVRS reactor.
Figure 2.2 presents a diagram of radial and axial geometry of the BEAVRS reactor
model. In the radial direction, the core is made up of fuel having three enrichments
surrounded by baffle, barrel and pressure vessel. It is important to account for all
structural materials as they provide reflection of neutrons into the core. Much detail
has been included in the axial direction, including the eight grid spacers. It is important to account for grid spacers because thermal flux is depressed in these regions. For
some of the analyses presented in this thesis, a 2-D version of this benchmark model
was used. To generate this model, a radial slice at an axial elevation of 225 cm was
used where there are no grid spacers or control rods in the model.
Two different operating conditions will be simulated in this thesis. The first is Hot
Zero Power (HZP) conditions, where it is assumed that the reactor is only heated by
pumping power. The coolant temperature and fuel temperature are in equilibrium at
24
560 F. The other operating condition is Hot Full Power (HFP), where the reactor is at
100% operating power and there is a significant temperature difference between fuel
and coolant with fission products ignored.
2.4
fission source generations
The first part of an MC calculation performs fission source iterations. This power
iteration-like method is outlined in fig. 2.3. It begins initially with a source bank that is
derived from a user’s guess. This may be from a uniform sampling over the geometry
or point sources, or, ideally, samples in every region containing fissionable material.
Once an initial source bank is constructed, neutrons are simulated one at a time. It
should be noted that multiple neutrons can be simulated at once through parallelization via message passing interface and/or threading. After a neutron is moved to a
collision site, OpenMC samples the interacting nuclide in the material. If this nuclide
is fissionable, a fission reaction will be sampled. The number of neutrons sampled in
a fission reaction is governed by the following formulas:
j
νt =
w νσ f
,
ke f f σ j
t
b ν c, ξ > ν − b ν c
t
t
t
ν=
.
dν e, otherwise
t
(2.1)
(2.2)
In eq. (2.1), νt is a real number specifying how many neutrons are produced from this
fission reaction. Other parameters include w for the statistical weight of a neutron,
j
νσ f which is the microscopic cross section for neutron production from fission in
j
nuclide j and similarly, σt which is the total cross section. Because integer neutrons
are simulated in MC, νt must be rounded up or down to ν number of neutrons. In
eq. (2.2), this is performed by sampling a uniform random number, ξ, to preserve the
expected value. Note that because we are solving an eigenvalue problem, the right
hand side of eq. (2.1) must be divided by the effective multiplication factor k e f f . This
parameter is initially guessed and commonly taken as unity during the first FSG. If
neutrons were produced from fission, they are stored temporarily in a fission bank
that will be adjusted for the next batch’s source bank. After sampling for fission, a
physical collision is sampled that will result in a capture (disappearance) or some
form of scattering (elastic, inelastic, etc.). If the neutron was not absorbed or leaked
from the system, the process starts over by finding a new distance to collision. Once
all neutrons are simulated in an FSG, a new source bank is ready for the next FSG.
25
Source bank
FSG i + 1
Source bank
FSG i
no
yes → j + 1
Particle j
New Particle?
no
yes
Distance to
Collision
Sample Collision
Alive?
no
Fission
Neutrons?
Sample Fission
yes
Put in Source
Bank i + 1
Figure 2.3. MC fission source iteration procedure.
Results presented in this section will study the convergence rate of FSGs in conventional MC simulations. Normally, to assess convergence, a true answer is calculated
and results after each iteration are compared to it. In MC, it is difficult to calculate
a reference solution due to limited computational resources. By reference solution,
we mean a simulation with many neutrons simulated per FSG (e.g., 100s of million,
billions). Therefore, many researchers have studied ways to determine when an MC
fission source is converged in the presence of random noise. Commonly, the Shannon
entropy diagnostic is used to assess source convergence [23, 24, 25]. This diagnostic
characterizes the fission source distribution with a single scalar value. To compute
Shannon entropy, a mesh is superimposed over the geometry containing fissionable
material. In each mesh cell, the probability of a source particle being born in cell j, p j ,
is determined by the ratio of the total weight of neutrons in cell j to the total weight
of all neutrons simulated. This probability distribution is used to calculate Shannon
entropy, Hsrc , with
M
Hsrc = − ∑ p j log2 p j
(2.3)
j =1
where M is the total number of spatial mesh cells. Similar to deterministic methods,
the rate of convergence will depend on the dominance ratio of the system. Dominance ratio is defined as the ratio of the first harmonic eigenvalue to the fundamental
26
7.59
100 thousand
1 million
4 million
10 million
100 million
Converged entropy
Shannon Entropy
7.585
7.58
7.575
7.57
7.565
0
50
100
150
200
250
300
350
Batch
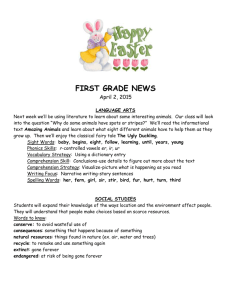
Figure 2.4. Convergence of MC source distribution for various number of neutrons simulated
in an FSG for 2-D BEAVRS model.
mode eigenvalue. It has numerical (convergence rate of power iteration) and physical
(stability) meanings. As dominance ratio approaches unity, the problem will be more
difficult to converge, which is especially true for large systems such as commercial
LWRs.
The first study performed was to calculate Shannon entropy after each FSG and
observe its rate of convergence. The 2-D BEAVRS model described in section 2.3 was
used with various numbers of neutrons simulated in an FSG. In all cases, 300 inactive
FSGs were run with results shown in fig. 2.4. An assembly mesh was used to calculate
Shannon entropy. In total, four cases were simulated in which the number of neutrons
in an FSG ranged from 100 thousand to 100 million. The first observation from fig. 2.4
is that 100 thousand neutrons per FSG is too few and results in erroneous noisy data.
This is referred to as under-sampling. By adding another factor of 10, this large undersampling bias is reduced. Another observation from these results is that the more
neutrons simulated, the less noisy Shannon entropy becomes. This is expected because
more samples mean a better characterization of the probability that a neutron will
be born in a Shannon entropy mesh cell. The 1 million neutrons per FSG is much
better than the 100 thousand case, but it still is slightly biased compared to the other
cases with more neutrons. The 4 million neutrons per FSG is still slightly noisy, but
becomes stationary about the converged Shannon entropy. Finally, the 10 million and
100 million cases converge smoothly and become stationary at around the same batch.
Thus, it is recommended to run at least 4 million neutrons in an FSG to converge the
fission source for the BEAVRS 2-D core. Note, for 10 million neutrons, this is about
200 neutrons per fuel pin assuming there are approximately 50,000 pins.
27
1.014
100 million 2D BEAVRS
100 million 3D BEAVRS
1.012
Shannon Entropy
1.01
1.008
1.006
1.004
1.002
1
0.998
50
100
150
200
250
300
Batch
Figure 2.5. Source convergence comparison between 2-D and 3-D BEAVRS.
4 million neutrons per FSG are needed to avoid under-sampling in 2-D BEAVRS.
A comparison was performed to study source convergence for the 3-D BEAVRS
model. For this simulation, 100 million neutrons per FSG were used, and the initial
source guess was uniform over fissionable regions. Results for 2-D and 3-D BEAVRS
cases are presented in fig. 2.5. In this plot, the final converged entropies were normalized to a value of one because different meshes (2-D vs. 3-D) result in a different
value of entropy. The entropy mesh for the 3-D model was assembly-wise in the radial
direction and split into 24 equal axial mesh over the active fuel region. It can readily
be observed that the 3-D model takes more batches to converge than the 2-D model.
This is because both the radial and axial source distributions are converging. Another
observation is that the initial value of entropy was further away from the final result
compared to the 2-D case. A reason for this could be that the converged fission source
for the 3-D model is more non-uniform. Thus, an initial uniform guess for the 3-D
model is worse than for the 2-D model.
Similar to the results presented in fig. 2.4 for 2-D, the same study was performed on
the 3-D BEAVRS model. Shannon entropy convergence results are shown in fig. 2.6. It
is clear from the plot that in 3-D, 1 million neutrons simulated per FSG is too small.
The converged Shannon entropy is under-predicted significantly and stationarity is
not observed. Increasing the number of neutrons to 4 million resulted in better convergence to the expected Shannon entropy. As the number of neutrons gets larger, the
Shannon entropy curve becomes smoother and all result in the same location. It took
about 200 FSGs to converge the fission source for this model.
28
12.58
1 million
4 million
10 million
50 million
Converged entropy
12.56
Shannon Entropy
12.54
12.52
12.5
12.48
12.46
12.44
12.42
12.4
12.38
0
50
100
150
200
250
Batch
Figure 2.6. BEAVRS 3-D source convergence comparison with different numbers of neutrons
simulated per FSG.
At least 4 million neutrons per FSG are needed to avoid under-sampling in
3-D BEAVRS.
2.5
tally batches
The second part of an MC simulation is to accumulate tallies of fluxes, reaction rates,
currents, etc. During a tally batch, neutrons’ contributions to tallies are recorded into
a temporary variable. If, for example, flux is being tallied, the total tracklength of neutrons for that entire batch will be in this temporary variable. Between tally batches,
this temporary variable, along with the square of this temporary variable, is recorded
in two separate tally parameters. Taking OpenMC as an example, this temporary variable is value and is an attribute of an instance of a tally object. The parameters value
and value2 are accumulated into attributes sum and sum_sq, respectively. In OpenMC,
these two parameters are then used to compute sample mean and sample variance of
each tally bin. It should be noted that a tally bin represents a specific score (flux, current, etc.) and filter combination (mesh, energy, etc.). OpenMC computes the sample
mean using
x̄ (n) = E[ x ] =
1 n
xi ,
n i∑
=1
(2.4)
29
where x̄ (n) is the sample mean, n is the number of tally batches or realizations, xi is
the temporary parameter value in OpenMC and E[·] is the expectation operator. Note
that the summation over xi is represented by the variable sum in the tally object in
OpenMC. The sample variance is computed using
n
s (n) =
n−1
2
"
#
1 n 2
2
xi − x̄ (n) ,
n i∑
=1
(2.5)
where s2 is the sample variance and the summation of xi2 is the sum_sq variable in
OpenMC. Equation (2.5) is also represented equivalently as
s2 ( n ) =
n
1
[ xi − x̄ (n)]2 .
n − 1 i∑
=1
(2.6)
The sample mean and variance are unbiased estimators of the population mean, µ
or E[ x ], and variance, σ2 or Var[ x ] [26]. Note that n − 1 is used in the sample variance in eq. (2.6) instead of n to make it an unbiased estimator if samples are drawn
independently. This is not always the case in eigenvalue simulations because successive fission source generations are highly correlated. The degree of this correlation
is largely influenced by the dominance ratio of the system as discussed in the next
section [24].
2.5.1 Correlated Statistics and Variance of the Mean
The ability to compute sample means and variances is important; however, sample
variance sheds no light on how good of an estimate the sample mean is in relation to
the population mean. The variance of the mean measures this and is written as
"
"
#
#
n
1 n
1
Var [ x̄ (n)] = Var
xi = 2 Var ∑ xi ,
n i∑
n
i =1
=1
(2.7)
where Var[·] is the variance operator. The variance of the summation can be rewritten
in terms of covariances as
"
#
n
Var
∑ xi =
i =1
n
∑
n
∑ Cov xi , x j =
i =1 j =1
n
n
Var
x
+
[
]
i
∑
∑ ∑ Cov xi , x j .
i =1
(2.8)
i =1 i 6 = j
The covariance of two different samples, Cov[xi , xj ], is defined as
Cov[ xi , x j ] = σ2 xi , x j = E ( xi − µ) x j − µ .
30
(2.9)
It is assumed that xi and x j are from the same population and thus have the same
mean. The variance operator can be easily obtained by replacing x j with xi . If independence of tally batches is assumed, the covariance term in eq. (2.8) disappears and the
variance of the mean becomes
Var [ x̄ (n)] =
1
n2
n
∑ Var [xi ] =
i =1
σ2
.
n
(2.10)
This implies that we should expect the variance to reduce at a rate proportional to the
inverse of the number of tally batches. It will be shown in this section that this is not
true when there is any correlation between tally batches, and high dominance ratio
eigenvalue problems (such as the BEAVRS model) are the most susceptible.
If correlation is present, the covariance term in eq. (2.8) needs to be included. This
relationship can be further simplified accounting for the result in eq. (2.10) and the
fact that Cov xi , x j = Cov x j , xi as
Var [ x̄ (n)] =
σ2
2
+ 2
n
n
n −1
∑ ∑ Cov
xi , x j .
(2.11)
i =1 j > i
Because xi and x j are from the same population, the covariance term is also referred
to as autocovariance. Tally batching in MC can be modeled as a stationary time series
[24]. Therefore, we can measure the autocovariance between two samples with their
lag, k, where k = j − i. Equation (2.11) can be rewritten to account for lag with
Var [ x̄ (n)] =
2 n −1 n − i
σ2
+ ∑ ∑ Covk [ x ] ,
n
n i =1 k =1
(2.12)
where
Covk [ x ] = E [( xi − µ) ( xi+k − µ)] .
(2.13)
By performing the summation over i, this simplifies even further to
Var [ x̄ (n)] =
σ2
2
+ 2
n
n
n −1
∑ (n − k) Covk [x] .
(2.14)
k =1
In correlated statistics, the degree of correlation is measured through correlation
coefficients. The following equations are used to compute correlation coefficients from
two sets of data or time series data (Autocorrelation Coefficients (ACCs)) [27]:
ρ xy
E ( x − µ x ) y − µy
Cov [ x, y]
=
=
σx σy
σx σy
31
(2.15)
and
ρk =
E [( xi − µ) ( xi+k − µ)]
Covk [ x ]
=
.
2
σ
σ2
(2.16)
In eq. (2.15), the correlation coefficient between x and y is the ratio of their covariance
to the product of their population standard deviations, σx and σy , respectively. The
mean values of the populations are represented by µ x and µy , respectively. For measuring ACCs with eq. (2.16), it is the ratio of autocovariance of lag k to the population
variance. Because the variance and mean of the population are unknown, the sample
variance and mean must be used. There are a few different ways to construct correlation coefficients of sample mean and variance. The definition used in this work is
from Kendall [27]. To arrive at Kendall’s definition, the dataset xi and xi+k are treated
as two separate data sets and therefore, eq. (2.15) is used to construct the definition.
By expanding this equation and replacing population variance and mean with sample
variance and mean, we arrive at
1
n−k
ρk =
n−k
∑ [( xi − x̄i ) ( xi+k − x̄i+k )]
i =1
.
n − k −1
n−k si si +k
(2.17)
The numerator of this equation can be rearranged similar to how eq. (2.5) relates to
eq. (2.6). Also, the square root of eq. (2.5) can be used to substitute in for sample
standard deviations. However, because these samples are not independent, the ratio
n/(n − 1) is not used. Equation (2.17) becomes
1
n−k
ρk = s
1
n−k
n−k
n−k
∑ xi xi+k − x̄i x̄i+k
s
i =1
∑ xi2 − x̄i2
i =1
1
n−k
.
n−k
(2.18)
∑ xi2+k − x̄i2+k
i =1
Finally, expressions for sample means can be expanded to arrive at a final form equivalent to Kendall,
n−k
n−k
n−k
( n − k ) ∑ xi xi +k − ∑ xi ∑ xi +k
i =1
i =1
i =1
ρk = s
2 s
2 .
n−k
n−k
n−k
n−k
(n − k) ∑ xi2 − ∑ xi
(n − k) ∑ xi2+k − ∑ xi+k
i =1
i =1
i =1
(2.19)
i =1
Kendall also notes there is bias in this estimator of ACCs. It is shown that for a truly
random series, the bias is exactly −1/ (n − 1). Thus for positive ACCs, there is a
32
negative bias if not enough samples are used in eq. (2.19). The variance of the mean,
displayed in eq. (2.14), can now be rewritten in terms of ACCs as
"
#
n −1 k
σ2
Var [ x̄ (n)] =
1+2 ∑ 1−
ρk .
n
n
k =1
2.5.1.1
(2.20)
Expected RMS Error from a Single Simulation
ACCs and variances are calculated on a tally bin basis. Thus, if we tally axiallyintegrated assembly fission source in the 2-D BEAVRS model, there will be 193 tally
bins, one for each mesh cell. When characterizing tally convergence of assembly fission source on a whole core basis, RMS error is calculated by comparing tallies to a
reference converged source distribution. The RMS error between accumulated tallies
and the reference source distribution is
v
u
u1 M
2
RMSn = t
ψm,n − ψm,re f ,
∑
M m =1
(2.21)
where M is the number of spatial regions, ψm,n is the accumulated fission source of
region m after n realizations and ψm,re f is the reference fission source. To predict the
expected RMS based on correlated batches, we can write
v
u
u1
E [ RMSn ] = t
M
v
u
u1
=t
M
M
∑
E
h
ψm,n − ψm,re f
2 i
(2.22)
m =1
M
∑
m =1
σψ2 m,n ,
where σψ2 m,n represents the variance of the mean. Substituting eq. (2.20) into eq. (2.22)
we arrive at an expression that is dependent on ACCs,
v
"
#
u
n −1 u 1 M σ2
k
m
1+2 ∑ 1−
ρmk
E [ RMSn ] = t
M m∑
n
=1 n
k =1
v
u
u 1 M
2 M 2 n −1
k
2 +
σ
σ
1
−
ρmk
=t
m
m ∑
Mn m∑
Mn m∑
n
=1
=1
k =1
33
(2.23)
where ρmk is defined as the ACC in region m for lag k. This equation can be rearranged
in a more convenient way as to define region-average quantities
v
u
u 1 M
2 n −1
k 1
t
2
E [ RMSn ] =
σm + ∑ 1 −
Mn m∑
n k =1
n M
=1
M
∑
σm2 ρmk .
(2.24)
m =1
The region-averaged variance is defined as
σ̄2 =
1
M
M
∑
σm2
(2.25)
m =1
and the region-averaged ACC is defined as
ρ̄k =
1
M σ̄2
M
∑
σm2 ρmk .
(2.26)
m =1
Using eq. (2.25) and eq. (2.26), eq. (2.24) can be simplified to
v "
u
#
n −1 u σ̄2
k
t
1+2 ∑ 1−
ρ̄k .
E [ RMSn ] =
n
n
k =1
(2.27)
Notice how similar eq. (2.27) and eq. (2.20) are to one another with the exception that
the expected RMS characterizes the entire core with a single scalar. This will be much
easier to work with when determining the degree of correlation present in fission
source mesh tallies.
√
RMS error will not decrease at 1/ n if correlation is present between tally
realizations.
2.5.1.2
Expected RMS Error from Mean of Separate Simulations
In section 2.5.1.1, eq. (2.27) represents the expected RMS of the results of a single
simulation compared to a reference distribution. In this section, a similar relationship
is derived for a combination of separate simulations. This is common practice in MC,
because by running separate independent simulations with different initial random
number seeds, true variances of tally estimates can be obtained. However, this does
not address the convergence rate of tally estimates toward a given variance or RMS
error.
34
At each tally batch, the means of these separate independent distributions are combined and compared with the reference. To define RMS error in this case, we can write
RMSRn
v
u
u1
=t
M
M
∑
m
1 R
ψr,m,n − ψm,re f
R r∑
=1
!2
,
(2.28)
where R is the number of independent simulations and ψr,m,n represents the accumulated fission source of region m after n realizations for independent simulation r. The
reference can be brought into the summation to give
RMSRn
v
u
u1
=t
M
M
∑
"
m =1
1 R
ψr,m,n − ψm,re f
∑
R r =1
#2
.
(2.29)
This square of the summation must be expanded and results in the form
RMSRn
v
"
u
R
u 1 M 1
2
u
+
ψ
−
ψ
r,m,n
u
m,re
f
∑
∑
u M m =1 R 2 r =1
u
#.
=u
R
u
t ∑ ∑ ψr,m,n − ψm,re f ψs,m,n − ψm,re f
(2.30)
r =1 s 6 =r
To determine the expected value of RMS error, eq. (2.30) becomes
v
(
u
h
R
u 1 M 1
2 i
u
E
ψ
−
ψ
+
r,m,n
u
m,re f
∑
∑
u M m =1 R 2 r =1
).
E [ RMSRn ] = u
u
R
u
t ∑ ∑ E ψr,m,n − ψm,re f ψs,m,n − ψm,re f
(2.31)
r =1 s 6 =r
The term E
h
ψr,m,n − ψm,re f
2 i
represents the variance of the mean from a single simu-
lation compared to the reference. This is exactly the same as eq. (2.22), except there is
a sum around independent simulations. The second expectation term represents the
covariance of two different independent simulations. Equation (2.31) is rewritten in
terms of variance and covariance as
v
(
)
u
R
R
u1 M 1
E [ RMSRn ] = t
∑ Var [ψr,m,n ] + ∑ ∑ Cov [ψr,m,n , ψs,m,n ] .
2
M m∑
r =1
r =1 s 6 =r
=1 R
35
(2.32)
Because these simulations are independent (initial random number seed is changed),
the covariance term will be zero. Thus, eq. (2.32) simplifies to
v
u
u1
E [ RMSRn ] = t
M
M
∑
m =1
1
R2
R
∑ Var [ψr,m,n ].
(2.33)
r =1
The variance term is the variance of the mean of a single simulation described by
eq. (2.20). Substituting this relation into eq. (2.33), the following relationship is obtained:
v
u
u1
E [ RMSRn ] = t
M
M
∑
m =1
1
R2
"
#
n −1 2
k
σrm
∑ n 1 + 2 ∑ 1 − n ρrmk .
r =1
k =1
R
(2.34)
Similar to eq. (2.24), eq. (2.34) can be rearranged as
v
u
u
E [ RMSRn ] = t
R M
2 n −1
k
1
1 R M 2
2
+
1
−
σ
∑ rm Rn ∑
∑ σrm ρrmk . (2.35)
R2 Mn r∑
n RM r∑
=1 m =1
=1 m =1
k =1
The final expression for the expected RMS as a result from combining independent
simulations is
v
u
u σ̄¯ 2
2σ̄¯ 2
E [ RMSRn ] = t
+
Rn
Rn
n −1 ∑
k =1
1−
k
n
v
"
u
#
n −1 u σ̄¯ 2
k
1+2 ∑ 1−
ρ̄¯ k = t
ρ̄¯ k , (2.36)
Rn
n
k =1
where the region-averaged and independent simulation-averaged variance, σ̄¯ 2 , is defined as
σ̄¯ 2 =
1 R M 2
∑ σrm
RM r∑
=1 m =1
(2.37)
and the region-averaged and independent simulation-averaged ACC, ρ̄¯ k , is defined as
ρ̄¯ k =
1
RMσ̄¯ 2
R
M
∑∑
2
σrm
ρrmk .
(2.38)
r =1 m =1
Equation (2.36) suggests that if each simulation has correlated tally batches, the mean
√
of those simulations will not converge at 1/ n. Another observation from this result
is that if each simulation has about the same region-averaged ACCs and variance, con-
36
vergence rates will be parallel. This is illustrated by the following equation assuming
that σ̄¯ 2 = σ̄2 and ρ̄¯ k = ρ̄k :
E [ RMSRn ] =
E [ RMSn ]
√
.
R
(2.39)
This expression highlights that at a given batch, the reduction of error by simulating
√
independent runs is 1/ R, but it is subject to the convergence rate of any single
simulation.
Running separate independent simulations will not make RMS error decrease
√
at 1/ n. If correlation is present between tally realizations in individual simulations, the convergence rate of the combination of these simulations will not
show a better convergence rate. The absolute RMS error at any batch is proportional to the inverse of the square root of number of separate simulations.
Thus, for a given tally, it is more effective to reduce its error by simulating
more particles per FSG and/or running additional separate simulations. Separate simulations also allow for correct confidence intervals to be calculated
because they are independent.
2.5.2 Effect of Tally Batch Correlation
In this section, results are presented which show the degree of correlation between
tally batches for the BEAVRS reactor. The first task is to generate a reference fission
source distribution so that tallies can be compared to the "right" answer when computing RMS with eq. (2.21). All ACCs are calculated using eq. (2.19). Observed trends
in RMS convergence are compared to theoretical predictions based on ACCs using
eq. (2.27) which depend on region-averaged variances and ACCs listed in eq. (2.25)
and eq. (2.26), respectively. It is important to note that results presented in this section
use the analog tally estimator in OpenMC.
2.5.2.1
Reference Fission Source Distributions
The reference fission source distribution was calculated from the average of 25 independent MC simulations of the BEAVRS 2-D core. Note, a reference here is a simulation with very large numbers of neutrons simulated per FSG. A true reference solution
is not generated, so results may be slightly affected. Each individual run had the following simulation parameters: 100 million neutrons in an FSG, 200 inactive FSGs, 100
tally batches with one FSG per batch. The average core eigenvalue for the accumu-
37
lation of all these cases was 1.003589(8), where (8) is one standard deviation from
the last digit of the reported eigenvalue. A fission source distribution was tallied for
three meshes: (1) assembly, (2) quarter assembly, and (3) pin. In addition, a spatial
distribution was calculated for a pin-to-assembly ratio.
All reference distributions, representing the mean value of all 25 simulations, are
presented in fig. 2.7. The corresponding relative sample standard deviation distributions about these means are shown in fig. 2.8. The mean distributions were normalized
such that the average fission source rate is unity. There are differences in the source
distributions compared to an actual PWR. The first is that we are only presenting 2-D
results. There is high peaking in four of the bundles where a control rod bank is usually slightly inserted. In addition, HZP conditions were simulated here which resulted
in lower power in the center of the core. This distribution flattens as HFP conditions
are reached.
The relative sample standard deviation plots are all presented on the same scale.
This shows that as the tally mesh gets smaller, the uncertainty in tallies increases
because less samples are contributing on average to each tally bin. In addition, the
distributions for assembly and quarter assembly in fig. 2.8 are not symmetric. This
means that higher harmonics are still not fully dampened after fission source iterations. It should be noted that we expect some asymmetry due to instrumentation
tubes present in some assemblies. From the pin-to-assembly ratio distribution, we observe that it is relatively symmetric. As expected, locations of high power have lower
relative standard deviation than locations with low power. Because the pin distribution was divided by the assembly distribution, the coarse mesh effects due to higher
modes are reduced.
2.5.2.2
Tally Convergence Results
This section focuses on convergence rates of tallies toward the reference distributions.
The first set of simulations studies the effect of spatial mesh size on fission source
tallies. In this study, 10 independent simulations were performed, each with 20 million neutrons simulated in an FSG. All spatial meshes can be tallied in a single run
using OpenMC. Similar to the reference distributions, a fission source distribution for
assembly, quarter assembly, pin and pin-to-assembly ratio was generated. A total of 1
billion neutrons were simulated in each case. To compare these distributions to the reference distribution, an RMS error over the whole core was calculated using eq. (2.21).
RMS error was calculated after each tally batch to observe convergence characteristics.
Results from this study for all four distributions are presented in fig. 2.9. In addition
√
to the RMS results, an ideal MC convergence rate of 1/ n is shown that assumes tally
batches are independent from one another. As mesh size is reduced, the convergence
rate is closer to ideal. This implies that there is significant correlation between tally
38
1.6
1.6
'ref_mean_qassy.dat' matrix
1.4
1.2
1.2
1
1
0.8
0.8
0.6
0.6
0.4
0.4
0.2
0.2
0
0
(a) Assembly Mesh
'ref_mean_pin.dat' matrix
1.4
(b) 1/4 Assembly Mesh
1.6
1.6
1.4
1.4
1.2
1.2
1
1
0.8
0.8
0.6
0.6
0.4
0.4
0.2
0.2
0
0
(c) Pin Mesh
(d) Pin-to-Assembly Ratio
Figure 2.7. Normalized 2-D BEAVRS reference nu-fission reaction rates.
39
7.0 x 10-3
'ref_rel_std_assy.dat' matrix
6.0 x 10-3
'ref_rel_std_qassy.dat' matrix
6.0 x 10-3
5.0 x 10-3
5.0 x 10-3
4.0 x 10-3
4.0 x 10-3
3.0 x 10-3
3.0 x 10-3
2.0 x 10-3
2.0 x 10-3
1.0 x 10-3
1.0 x 10-3
0.0 x 100
0.0 x 100
(a) Assembly Mesh
'ref_rel_std_pin.dat' matrix
7.0 x 10-3
(b) 1/4 Assembly Mesh
7.0 x 10-3
7.0 x 10-3
6.0 x 10-3
6.0 x 10-3
5.0 x 10-3
5.0 x 10-3
4.0 x 10-3
4.0 x 10-3
3.0 x 10-3
3.0 x 10-3
2.0 x 10-3
2.0 x 10-3
1.0 x 10-3
1.0 x 10-3
0.0 x 100
0.0 x 100
(c) Pin Mesh
(d) Pin-to-Assembly Ratio
Figure 2.8. Relative sample standard deviation based on normalized 2-D BEAVRS reference
nu-fission reaction rates.
40
1
RMS [%]
RMS [%]
1
Ideal 1/sqrt(N)
0.1
107
108
0.1
107
109
108
Number of Histories
109
Number of Histories
(a) Assembly Mesh
(b) 1/4 Assembly Mesh
RMS [%]
10
RMS [%]
10
1
107
108
109
1
107
108
Number of Histories
109
Number of Histories
(c) Pin Mesh
(d) Pin to Assembly Ratio
Figure 2.9. OpenMC RMS convergence of spatial nu-fission rate analog tallies for 10 independent simulations of the 2-D BEAVRS model.
batches on an assembly mesh; this correlation is reduced as the mesh becomes smaller.
Tally batches are correlated no matter the mesh size because fission sites generated in
an FSG are used as source sites in the next generation.
The magnitude of correlation is related to the dominance ratio of the system [24,
28]. The closer the dominance ratio is to unity, the higher the correlation. Although
the dominance ratio has the same magnitude regardless of mesh size, it appears to
affect the assembly mesh results more than the pin mesh results. This is because
pin statistical errors are very large when the total amount of particles simulated is
low. As statistical error decreases, effects from higher modes become more important.
This can be observed in the plots where pin errors are on the order of 1-10% and
assembly from 0.1-1%. In the pin mesh, some correlation is observed as the error
becomes small and the curve deviates from ideal. Another interesting observation is
that for some simulations, the convergence is not monotonic. There are some cases
where the error just randomly increases. One explanation for this is that throughout
the simulations, there is random noise present due to the nature of random sampling
in MC. Because there is such high correlation, the distribution convergence can go
off on these random tangents. The best convergence rate is observed in the pin-toassembly ratio distribution. It does not noticeably deviate from the ideal convergence
41
rate. This also supports the previous explanation because by dividing out the coarse
mesh assembly effects, the correlation from the pin mesh is reduced. For the remaining
results presented in this section, only an assembly and pin mesh are compared as they
represent a coarse and fine mesh, respectively.
The next study performed was to examine the number of neutrons in an FSG. Like
the previous study, 10 independent simulations were performed with 2 million, 10 million and 20 million neutrons per FSG, with a total of 1 billion neutrons simulated. Figure 2.10 presents the results of this study. In each plot, two curves are shown for each
simulation. The first is the RMS error from one simulation compared to the reference
and the second is the RMS error from the average of all 10 independent simulations.
In addition, an ideal convergence rate is plotted that passes through the first point of
the 2 million neutrons per FSG curves. The first observation from these results is that
the slope of the curves is about the same on the log scale. This implies that, according
to the results, the degree of correlation between tally batches is about the same for
the cases simulated. An interesting trend in the results is that the first point in each
curve follows the ideal convergence rate. The first tally batch in all simulations has
no correlation because it is the first realization. This is also true when comparing the
RMS error of one simulation to the RMS error of ten simulations. The first points have
√
a ratio of 1/ 10. Another key observation is that even the mean of ten simulations is
just as correlated as one simulation. The error is reduced, but the rate at which tallies
converge is approximately the same. This behavior is predicted by eq. (2.36). Because
each individual simulation has approximately the same correlation, the combination
of these 10 simulations follows the convergence rate of a single simulation, but at a
√
factor of 1/ 10 less because the simulations are independent.
Up to this point, the assembly mesh has been characterized by high correlation.
To quantify the amount of correlation, region-averaged ACCs are calculated using
eq. (2.26). As stated in section 2.5.1, using the sample standard deviation to compute
ACCs yields a biased estimate. This bias can be reduced by increasing the number of
realizations. To study this bias, results from the 2 million neutrons per FSG simulation
were used and region-averaged ACCs were calculated with various numbers of realizations and lag. Results from these calculations are presented in fig. 2.11. The plot
indicates that for both assembly and pin mesh, at least 500 tally batches are needed to
reduce bias in ACCs to an acceptable level. This plot also shows that ACCs decrease
in magnitude as the lag is increased. This is true because the largest correlation is
between successive FSGs where source sites are directly coupled.
When discussing ACCs, it is common to plot them as function of lag, known as a
correlogram or autocorrelation plot. This is shown in fig. 2.12 for different numbers of
neutrons per FSG. Each individual simulation of a given number of neutrons per FSG
produced region-averaged correlation coefficients as a function of lag. The curves in
42
RMS [%]
1
0.1
0.01
106
Ideal
2 million - 1 Realization
2 million - 10 Realizations
10 million - 1 Realization
10 million - 10 Realizations
20 million - 1 Realization
20 million - 10 Realizations
107
108
109
108
109
Number of Histories
(a) Assembly Mesh
RMS [%]
10
1
0.1
106
Ideal
2 million - 1 Realization
2 million - 10 Realizations
10 million - 1 Realization
10 million - 10 Realizations
20 million - 1 Realization
20 million - 10 Realizations
107
Number of Histories
(b) Pin Mesh
Figure 2.10. Effect of number of neutrons simulated in a tally batch on RMS convergence for
the 2-D BEAVRS model.
43
0.02
0.6
0.015
0.5
Autocorrelation Coefficient
Autocorrelation Coefficient
0.7
0.4
0.3
0.2
Lag 1
Lag 2
Lag 3
Lag 4
Lag 5
Lag 10
Lag 15
Lag 20
0.1
0
-0.1
-0.2
50
100
150
200
250
300
350
400
450
0.01
0.005
0
Lag 1
Lag 2
Lag 3
Lag 4
Lag 5
Lag 10
Lag 15
Lag 20
-0.005
-0.01
-0.015
500
-0.02
50
Number of Tally Realizations
100
150
200
250
300
350
400
450
500
Number of Tally Realizations
(a) Assembly Mesh
(b) Pin Mesh
Figure 2.11. Lag-k correlation coefficients of the 2-D BEAVRS model with different numbers
of tally realizations.
fig. 2.12 represent the average and sample standard deviation of the spatially-averaged
correlation coefficients for 10 independent simulations. The results show that high
correlation does exist for the assembly mesh at about 0.7 for lag 1. The maximum
correlation that can be achieved is unity. Compared with the assembly results, the pin
results are not as highly correlated. Another observation is that the sample standard
deviation increases as the lag increases. This is because fewer samples are available for
the larger lags. Consistent with the observations from fig. 2.10, there is no discernible
difference in the correlation for different numbers of neutrons per FSG.
Finally, we predict the behavior of RMS convergence rates using eq. (2.27) for the
expected RMS error using region-averaged ACCs from fig. 2.12. The results are presented in fig. 2.13. In this plot, all 10 independent simulations are shown for each
amount of neutrons simulated in an FSG. It should be noted that in eq. (2.27), the
RMS error is proportional to standard deviation. In the results presented in fig. 2.13,
we normalized this value such that the first point matches the ideal convergence line.
Agreement between theoretical prediction matches well with observed RMS convergence rates. Note the theoretical model does not account for random noise and thus,
all curves are monotonically decreasing. This study confirms that it is indeed correlation between tally batches that is causing deviations from the ideal convergence which
assumes independence.
2.5.2.3
Autocorrelation Coefficients for 3-D BEAVRS
Although only an approximation to 3-D realistic reactors, the 2-D simulations indicated that there is significant correlation between tally batches. It is important to perform a study on the 3-D BEAVRS model to determine if the correlation is less or
more. The best way to portray this information is to generate region-averaged ACCs
over the 3-D BEAVRS core. In this study, 50 million neutrons were simulated in a
tally batch and fission source tallies were recorded over the same axially-integrated
44
0.8
2 million
10 million
20 million
Sample Autocorrelation
0.7
0.6
0.5
0.4
0.3
0.2
0.1
0
-0.1
10
20
30
40
50
60
70
80
90
100
90
100
Lag
(a) Assembly Mesh
0.02
2 million
10 million
20 million
Sample Autocorrelation
0.015
0.01
0.005
0
-0.005
10
20
30
40
50
60
70
80
Lag
(b) Pin Mesh
Figure 2.12. Correlogram of the first 100 lag autocorrelation coefficients using the 2-D BEAVRS
model.
45
RMS [%]
1
0.1
106
Ideal
2 million
10 million
20 million
Theoretical w/ Correlation
107
108
109
Number of Histories
Figure 2.13. Theoretical prediction of expected RMS using autocorrelation coefficients for an
assembly mesh on the 2-D BEAVRS model.
assembly mesh as the 2-D BEAVRS cases. As observed in fig. 2.9, the magnitude of
ACCs is dependent on the mesh size. Thus, even though there is a 3-D model, the
same mesh must be used to determine the change in the magnitude of correlation.
ACC results are presented in fig. 2.14. The behavior and magnitude of 3-D ACCs are
within the one sample standard deviation of the 2-D ACCs, and their mean values are
very similar. From this study, it cannot be concluded whether the correlation is less or
more in the 3-D model. The results indicate that correlation is about the same for the
BEAVRS reactor whether using the 2-D or 3-D model. This is also confirmed by the
dominance ratio for each of these models which is approximately 0.996* . Note, this
may not be the case with all reactor models, especially if the dominance ratio changes
significantly between 2-D and 3-D representations.
2.5.2.4
Fixed Source Simulations
Fixed source simulations do not have correlated tally batches because the fission
source is fixed. In this section, studies are performed to investigate the convergence
rate of tallies when a source bank is fixed, once converged during inactive FSGs. The
first set of simulations performed involved converging a source distribution with 2
million, 10 million, 20 million, 50 million and 100 million neutrons per FSG. During
active tally batches, the same number of neutrons are simulated in a batch. The results of this study are presented in fig. 2.15. The first observation from these results is
that convergence rates are monotonic and smooth. Unfortunately, because the source
* Calculation
of dominance ratio is discussed further in section 4.10.
46
0.8
2-D BEAVRS - 2
2-D BEAVRS - 10
2-D BEAVRS - 20
3-D BEAVRS - 50
Sample Autocorrelation
0.7
0.6
million
million
million
million
0.5
0.4
0.3
0.2
0.1
0
-0.1
10
20
30
40
50
60
70
80
90
100
Lag
Figure 2.14. Spatially-averaged autocorrelation coefficients for an assembly mesh fission
source tally over 3-D BEAVRS core.
bank is truncated, a bias will exist between the converged fission source tallies and
reference distributions. This is because the reference distribution effectively has 250
million fission source sites in its bank. A positive result from this simulation is that
the bias follows independent statistics. The ratio of the final results of any two curves
is roughly the inverse square root of the ratio the number of neutrons simulated per
FSG. This comparison does not work for the 100 million case. In the plot, 50 million
and 100 million cases saturate at the same RMS error. This is because the converged
distribution is within the uncertainty of the reference distribution. The saturated values of about 0.4% are similar in magnitude to the relative sample standard deviation
of the reference shown in fig. 2.8. The reference distribution’s relative sample standard
deviations are of the same order of magnitude. Even though there is no correlation
between tally batches now, ideal convergence cannot be achieved because of the bias
due to truncating the source bank.
To observe ideal convergence toward this saturated value, a smaller number of neutrons needs to be simulated during active tally batches than was simulated during
source convergence. This was verified by generating a source bank with 100 million
neutrons per FSG and then only sampling 100 thousand neutrons randomly from that
bank during each active tally batch. This curve is added to the previous results as
shown in fig. 2.16. From the results, an ideal convergence rate is achieved at higher
error until this error from truncating the source bank begins to dominate. Performing fixed source calculations may be beneficial instead of continuing to update the
fission source bank because tally convergence is smoother. Even though it would be
impossible to know the saturation bias without generating a more detailed reference
47
RMS [%]
10
2 million source bank, 2
10 million source bank, 10
20 million source bank, 20
50 million source bank, 50
100 million source bank, 100
million
million
million
million
million
per
per
per
per
per
Ideal
batch
batch
batch
batch
batch
1
0.1
105
106
107
108
109
Number of Histories
Figure 2.15. RMS error for constant source bank after inactive FSGs for the 2-D BEAVRS
model.
per
per
per
per
per
per
Ideal
batch
batch
batch
batch
batch
batch
RMS [%]
10
2 million source bank, 2 million
10 million source bank, 10 million
20 million source bank, 20 million
50 million source bank, 50 million
100 million source bank, 100 million
100 million source bank, 100 thousand
1
0.1
105
106
107
108
109
Number of Histories
Figure 2.16. RMS error for constant source bank with factor of 100 less neutrons simulated per
tally batch on the 2-D BEAVRS model.
48
distribution, independent simulations with different random number seeds can be
performed to obtain an accurate confidence interval.
Highlights
• At least 4 million neutrons should be simulated per FSG to avoid undersampling in 2-D BEAVRS model. This was determined from Shannon entropy convergence studies.
• At least 4 million neutrons should be simulated per FSG to avoid undersampling in 3-D BEAVRS model.
• Fission source convergence requires more FSGs for 3-D BEAVRS compared
with 2-D BEAVRS.
• Assembly tallies do not converge at an ideal rate assuming independent
tally realizations. Tally batches are in fact highly correlated with a lag-1
region-averaged ACC of about 0.7.
• Correlation effects decrease with smaller meshes. Pin mesh ACCs are much
smaller than assembly mesh ACCs.
• The mean of separate simulations will converge at about the same rate
as any individual simulation if ACCs are about the same. The absolute
error, however, will be reduced by a factor of the inverse square root of the
number of separate simulations.
• To reduce tally error, it is recommended to run more neutrons per FSG
or more separate simulations. Running more neutrons through additional
batches will reduce the error slowly due to correlation. By running more
separate simulations, correct confidence intervals for tally estimates can be
calculated.
• There is no correlation between tally batches in fixed source simulations
because the fission source is not updated. Ideal convergence rates can be
obtained when fewer neutrons than source sites in bank are simulated
per tally batch. RMS eventually saturates because of the truncation of the
source bank compared to reference distribution.
49
3
N O N L I N E A R D I F F U S I O N A C C E L E R AT I O N
3.1
notation
Before deriving NDA relationships, notation is explained. If a parameter has a ·, it
is surface area-averaged and if it has a ·, it is volume-averaged. When describing a
specific cell in the geometry, indices (i, j, k ) are used which correspond to directions
( x, y, z). In most cases, the same operation is performed in all three directions. To
compactly write this, an arbitrary direction set (u, v, w) that corresponds to cell indices
(l, m, n) is used. Note that u and l do not have to correspond to x and i. However, if u
and l correspond to y and j, v and w correspond to x and z directions. An example of
this is shown in the following expression:
∑
D
u,g
J l +1/2,m,n ∆vm ∆w
n
E
(3.1)
u∈( x,y,z)
Here, u takes on each direction one at a time. The parameter J is surface area-averaged
over the transverse indices m and n located at l + 1/2. Usually, spatial indices are listed
as subscripts and the direction as a superscript. Energy group indices represented by
g and h are also listed as superscripts here. The group g is the group of interest and,
if present, h is all groups. Finally, any parameter surrounded by h·i represents a tally
quantity that can be edited from an MC solution.
3.2
theory
In chapter 1, it was discussed that NDA is a diffusion model that has equivalent
physics to a transport model. There are many different methods that can be classified
as NDA. The CMFD method is a type of NDA that represents second order multigroup
diffusion equations on a coarse spatial mesh. Whether a transport model or diffusion
model is used to represent the distribution of neutrons, these models must satisfy the
50
neutron balance equation. This balance is represented by the following formula for a
specific energy group g in cell (l, m, n):
D
∑
E D
E
u,g
u,g
v w
J l +1/2,m,n ∆vm ∆w
J
∆
∆
−
n
l −1/2,m,n m n
u∈( x,y,z)
+
D
E
g
g
Σtl,m,n φl,m,n ∆ul ∆vm ∆w
n
G
=
∑
h→ g h
νs Σsl,m,n φl,m,n ∆ul ∆vm ∆w
n
h =1
+
G
1
ke f f
∑
h =1
h→ g h
ν f Σ f φl,m,n ∆ul ∆vm ∆w
n
l,m,n
.
(3.2)
In eq. (3.2) the parameters are defined as:
E
D
u,g
• J l ±1/2,m,n ∆vm ∆w
n — surface area-integrated net current over surface ( l ± 1/2, m, n )
with surface normal in direction u in energy group g. By dividing this quantity
by the transverse area, ∆vm ∆w
n , the surface area-averaged net current can be computed.
D g
E
g
• Σtl,m,n φl,m,n ∆ul ∆vm ∆w
n — volume-integrated total reaction rate over energy group
g.
h→ g h
u
v
w
• νs Σsl,m,n φl,m,n ∆l ∆m ∆n — volume-integrated scattering production rate of neutrons that begin with energy in group h and exit reaction in group g. This reaction rate also includes the energy transfer of reactions (except fission) that
produce multiple neutrons such as (n, 2n); hence, the need for νs to represent
neutron multiplicity.
• k e f f — core multiplication factor.
h→ g h
u
v
w
• ν f Σ f φl,m,n ∆l ∆m ∆n — volume-integrated fission production rate of neul,m,n
trons from fissions in group h that exit in group g.
Each quantity in h·i represents a scalar value that is obtained from an MC tally. A good
verification step when using MC is to make sure that tallies satisfy this balance equation within statistics. No NDA acceleration can be performed if the balance equation
is not satisfied.
There are three major steps to consider when performing NDA: (1) calculation of
macroscopic cross sections and nonlinear parameters, (2) solving an eigenvalue problem with a system of linear equations, and (3) modifying MC source distribution to
align with the NDA solution on a chosen mesh. This process is illustrated as a flow
chart in fig. 3.1. After a batch of neutrons is simulated, NDA can take place. Each of
the steps described above is described in detail in sections 3.2.1 to 3.2.3.
51
Batch i
tally NDA
no
Run NDA?
Batch i + 1
tally NDA
yes
Calculate XS & DC
Modify MC Source
Calculate Equivalence
Solve NDA eqs.
Figure 3.1. Flow chart of NDA process.
3.2.1 Calculation of Macroscopic Cross Sections
A diffusion model needs macroscopic cross sections and diffusion coefficients to solve
for multigroup fluxes. Cross sections are derived by conserving reaction rates predicted by MC tallies. From eq. (3.2), total, scattering production and fission production
macroscopic cross sections are needed. They are defined from MC tallies as follows:
D
g
Σtl,m,n
≡
E
g
g
Σtl,m,n φl,m,n ∆ul ∆vm ∆w
n
E ,
D g
φl,m,n ∆ul ∆vm ∆w
n
h→ g
νs Σsl,m,n ≡
h→ g h
νs Σsl,m,n φl,m,n ∆ul ∆vm ∆w
n
h
φl,m,n ∆ul ∆vm ∆w
n
(3.3)
(3.4)
and
h→ g
νf Σ f
l,m,n
≡
h→ g h
ν f Σ f φl,m,n ∆ul ∆vm ∆w
n
l,m,n
h
φl,m,n ∆ul ∆vm ∆w
n
.
(3.5)
In order to fully conserve neutron balance, leakage rates also need to be preserved.
In standard diffusion theory, leakage rates are represented by diffusion coefficients.
52
Unfortunately, it is not easy in MC to calculate a single diffusion coefficient for a cell
that describes leakage out of each surface. Luckily, it does not matter what definition of
diffusion coefficient is used because nonlinear equivalence parameters will correct for
this inconsistency. However, depending on the diffusion coefficient definition chosen,
different convergence properties of NDA equations are observed. Here, we introduce
a diffusion coefficient that is derived for a coarse energy transport reaction rate. This
definition can easily be constructed from MC tallies provided that angular moments
of scattering reaction rates can be obtained. The diffusion coefficient is defined as
follows:
D
g
D l,m,n =
g
φl,m,n ∆ul ∆vm ∆w
n
E
D g
E,
g
3 Σtrl,m,n φl,m,n ∆ul ∆vm ∆w
n
(3.6)
where
D
E D g
E
g
g
g
u v w
Σtrl,m,n φl,m,n ∆ul ∆vm ∆w
=
Σ
φ
∆
∆
∆
n
tl,m,n l,m,n l m n
E
D
g
g
− νs Σs1l,m,n φl,m,n ∆ul ∆vm ∆w
n .
(3.7)
Note that the transport reaction rate is calculated from the total reaction rate reduced
by the P1 scattering production reaction rate. Equation (3.6) does not represent the best
definition of diffusion coefficients from MC; however, it is very simple and usually fits
into MC tally frameworks easily. More details about different definitions of diffusion
coefficients are discussed in section 4.7.
3.2.2 CMFD Equations
The first part of this section is devoted to discussing second-order finite volume discretization of multigroup diffusion equations. This will be followed up by the formulation of CMFD equations that are used in this NDA scheme. When performing
second-order finite volume discretization of the diffusion equation, we need information that relates current to flux. In this numerical scheme, each cell is coupled only
to its direct neighbors. Therefore, only two types of coupling exist: (1) cell-to-cell coupling and (2) cell-to-boundary coupling. The derivation of this procedure is referred to
as finite difference diffusion equations and can be found in literature such as Hébert
[29]. These current/flux relationships are as follows:
• cell-to-cell coupling
g
u,g
J l ±1/2,m,n
=−
g
2D l ±1,m,n D l,m,n
g
g
D l ±1,m,n ∆ul + D l,m,n ∆ul±1
53
g
g
±φl ±1,m,n ∓ φl,m,n ,
(3.8)
• cell-to-boundary coupling
u,g
J l ±1/2,m,n
g
u,g
2D l,m,n 1 − β l ±1/2,m,n
g
φl,m,n .
=± g u,g
u,g
4D l,m,n 1 + β l ±1/2,m,n + 1 − β l ±1/2,m,n ∆ul
(3.9)
In eqs. (3.8) and (3.9), the ± refers to left (-x) or right (+x) surface in the x direction,
back (-y) or front (+y) surface in the y direction and bottom (-z) or top (+z) surface in
u,g
the z direction. For cell-to-boundary coupling, a general albedo, β l ±1/2,m,n , is used. The
albedo is defined as the ratio of incoming (− superscript) to outgoing (+ superscript)
partial current on any surface represented as
u,g−
u,g
β l ±1/2,m,n
=
J l ±1/2,m,n
u,g+
J l ±1/2,m,n
.
(3.10)
Common boundary conditions are: vacuum (β = 0), reflective (β = 1) and zero flux
(β = −1). Both eq. (3.8) and eq. (3.9) can be written in this generic form,
u,g
e u,g (. . . ) .
J l ±1/2,m,n = D
l,m,n
(3.11)
e u,g represents the linear coupling term between current and flux.
The parameter D
l,m,n
These current relationships can be sustituted into eq. (3.2) to produce a linear system
of multigroup diffusion equations for each spatial cell and energy group. However, a
solution to these equations is not consistent with a higher order transport solution unless equivalence factors are present. This is because both the diffusion approximation,
governed by Fick’s Law, and spatial trunction error will produce differences. Thereb u,g , is added to eqs. (3.8) and (3.9). These equations are,
fore, a nonlinear parameter, D
l,m,n
respectively,
g
g
g
g
u,g
e u,g ±φ
b u,g φ
J l ±1/2,m,n = − D
φ
φ
∓
+
D
+
l
±
1,m,n
l,m,n
l
±
1,m,n
l,m,n
l,m,n
l,m,n
(3.12)
and
u,g
u,g
g
u,g
g
e
b
J l ±1/2,m,n = ± D
l,m,n φl,m,n + Dl,m,n φl,m,n .
(3.13)
The only unknown in each of these equations is the equivalence parameter. The current, linear coupling term and flux can either be obtained or derived from MC tallies.
Thus, it is called nonlinear because it is dependent on the flux which is updated on
the next iteration.
54
Equations (3.12) and (3.13) can be substituted into eq. (3.2) to create a linear system
of equations that is consistent with transport physics. One example of this equation is
written for an interior cell,
∑
u∈ x,y,x
g
1 h
u,g
u,g
−
D̃
−
D̂
l −1/2,m,n
l −1/2,m,n φl −1,m,n
∆ul
g
u,g
u,g
u,g
u,g
+ D̃l −1/2,m,n + D̃l +1/2,m,n − D̂l −1/2,m,n + D̂l +1/2,m,n φl,m,n
g
i
u,g
u,g
+ − D̃l +1/2,m,n + D̂l +1/2,m,n φl +1,m,n
g
g
+ Σtl,m,n φl,m,n −
G
h→ g h
φ
l,m,n l,m,n
∑ νs Σs
=
h =1
h→ g h
1 G
ν f Σ f φl,m,n .
∑
l,m,n
k h =1
(3.14)
It should be noted that before substitution, eq. (3.2) was divided by the volume of the
cell, ∆ul ∆vm ∆w
n . Equation (3.14) can be represented in operator form as
MΦ =
1
FΦ,
k
(3.15)
where M is the neutron loss matrix operator, F is the neutron production matrix
operator, Φ is the multigroup flux vector and k is the eigenvalue. This generalized
eigenvalue problem is solved to obtain fundamental mode multigroup fluxes and
eigenvalue. In order to produce consistent results with transport theory from these
equations, the neutron balance equation must have been satisfied by MC tallies. The
desire is that CMFD equations will produce a more accurate source than MC after
each fission source generation.
3.2.3 CMFD Feedback
Now that a more accurate representation of the expected source distribution is estimated from CMFD, it needs to be communicated back to MC. The first step in this
process is to generate a probability mass function that provides information about
how probable it is for a neutron to be born in a given cell and energy group. This is
represented as
h→ g h
g
pl,m,n
=
∑hG=1 ν f Σ f l,m,n φl,m,n ∆ul ∆vm ∆w
n
h→ g h
∑n ∑m ∑l ∑hG=1 ν f Σ f l,m,n φl,m,n ∆ul ∆vm ∆w
n
.
(3.16)
This equation can be multiplied by the number of source neutrons to obtain an estimate of the expected number of neutrons to be born in a given cell and energy group.
55
This distribution can be compared to the MC source distribution to generate weight
adjusted factors defined as
g
g
f l,m,n
=
N pl,m,n
∑ ws
;
s ∈ ( g, l, m, n) .
(3.17)
s
The MC source distribution is represented on the same coarse mesh as CMFD by
summing all neutrons’ weights, ws , in a given cell and energy group. MC source
weights can then be modified by this weight adjustment factor so that it matches the
CMFD solution on the coarse mesh,
g
ws0 = ws × f l,m,n ;
s ∈ ( g, l, m, n) .
(3.18)
It should be noted that heterogeneous information about local coordinates and energy
remain constant throughout this modification process.
3.3
implementation in openmc
The section describes how CMFD was implemented in OpenMC. Before the simulation
begins, a user sets up a CMFD input file that contains the following basic information:
• CMFD mesh (space and energy),
• boundary conditions at edge of mesh (albedos),
• acceleration region (subset of mesh, optional),
• FSG/batch that CMFD should begin, and
• whether CMFD feedback should be applied.
It should be noted that for more difficult simulations (e.g., LWRs), there are other
options available to users such as tally resetting parameters, effective down-scatter
usage, tally estimator, etc. These will be discussed in chapter 4.
Of the options described above, the optional acceleration subset region is an uncommon feature. Because OpenMC only has a structured Cartesian mesh, mesh cells
may overlay regions that don’t contain fissionable material and may be so far from
the core that the neutron flux is very low. If these regions were included in the CMFD
solution, bad estimates of diffusion parameters may result and affect CMFD feedback.
To deal with this, a user can carve out an active acceleration region from their structured Cartesian mesh. This is illustrated in fig. 3.2. When placing a CMFD mesh over
a geometry, the boundary conditions must be known at the global edges of the mesh.
If the geometry is complex like the one in fig. 3.2, one may have to cover the whole
56
R
P
N M
L
1
15 16
4
16
5
16
6
7
20
6
9
10
11
12
16
12
12
16
20
6
12
12
16
13
15 16
14
15
16
16
6
20
16
16
6
16
16
16 15
16
20
6
16
12
12
6
20
12
12
16
6
12
12
20
16
A
16
16
12
12
12
12
16
12
16
12
B
16
16
12
16
12
16
12
16
C
16 15
16
12
16
12
12
16
16
12
12
D
16
16
12
12
E
6
16
12
F
20
12
16
G
6
16
16
H
20
16
3
8
J
6
2
6
K
16
6
3.1 w/o U235
1.6 w/o U235
2.4 w/o U235
#
BP pins
Figure 3.2. Diagram of CMFD acceleration mesh.
geometry including the reactor pressure vessel because we know that there is a zero
incoming current boundary condition at the outer edge of the pressure vessel. This
is not viable in practice because neutrons in simulations may not reach mesh cells
that are near the pressure vessel. To circumvent this, one can shrink the mesh to cover
just the core region as shown in the diagram. However, one must still estimate the
boundary conditions at the global boundaries, but at these locations, they are not
readily known. In OpenMC, one can carve out the active core region from the entire
structured Cartesian mesh. This is shown in fig. 3.2 by the darkened region over the
core. The albedo boundary conditions at the active core/reflector boundary can be tallied indirectly during the MC simulation with incoming and outgoing partial currents.
This allows the user to not have to worry about neutrons producing adequate tallies
in mesh cells far away from the core.
During an MC simulation, CMFD tallies are accumulated. The basic tallies needed
are listed in table 3.1. Each tally is performed on a spatial and energy mesh basis. The
surface area-integrated net current is tallied on every surface of the mesh. OpenMC
tally objects are created by the CMFD code internally, and cross sections are calculated at each CMFD feedback iteration. The first CMFD iteration, controlled by the
user, occurs just after tallies are communicated to the master processor. Once tallies
are collapsed, cross sections, diffusion coefficients and equivalence parameters are
calculated. This is performed only on the acceleration region if that option has been
activated by the user. Once all diffusion parameters are calculated, CMFD matrices
are formed where energy groups are the inner most iteration index. In OpenMC, com-
57
Table 3.1. OpenMC CMFD tally list.
tally
D
D
g
g
φl,m,n ∆ul ∆vm ∆w
n
g
E
Σtl,m,n φl,m,n ∆ul ∆vm ∆w
n
E
E
g
g
νs Σs1l,m,n φl,m,n ∆ul ∆vm ∆w
n
h→ g h
w
u
v
νs Σsl,m,n φl,m,n ∆l ∆m ∆n
h→ g h
w
u
v
ν f Σ f φl,m,n ∆l ∆m ∆n
l,m,n
E
D
u,g
J l ±1/2,m,n ∆vm ∆w
n
D
OpenMC score
OpenMC filter
flux
mesh, energy
total
mesh, energy
nu-scatter-1
mesh, energy
nu-scatter
mesh, energy, energyout
nu-fission
mesh, energy, energyout
current
mesh, energy
pressed row storage sparse matrices are used due to the sparsity of CMFD operators.
An example of this sparsity is shown for the 3-D BEAVRS model in fig. 3.3. These matrices represent an assembly radial mesh, 24 cell mesh in the axial direction and two
energy groups. The loss matrix is 99.92% sparse and the production matrix is 99.99%
sparse. Although the loss matrix looks like it is tridiagonal, it is really a seven banded
matrix with a block diagonal matrix for scattering. The production matrix is a 2 × 2
block diagonal; however, zeros are present because no fission neutrons appear with
energies in the thermal group.
To solve the eigenvalue problem with these matrices, different source iteration and
linear solvers can be used. The most common source iteration solver used is standard
power iteration [30]. To accelerate these source iterations, a Wielandt shift scheme can
be used [31]. PETSc solvers were first implemented to perform the linear solution in
parallel that occurs once per source iteration [32]. When using PETSc, different types
of parallel linear solvers and preconditioners can be used. By default, OpenMC uses
an incomplete LU preconditioner and a GMRES Krylov solver. After some initial studies of parallelization with PETSc, it was observed that because CMFD matrices are
very sparse, solution times do not scale well. An additional Gauss-Seidel linear solver
with Chebyshev acceleration was added that is similar to the one used for CMFD in
CASMO [2, 33]. This solver was implemented with a custom section for two energy
groups. Because energy group is the inner most index, a block diagonal is formed
when using more than one group. For two groups, it is easy to invert this diagonal
analytically inside the Gauss-Seidel iterative solver. For more than two groups, this
analytic inversion can still be performed, but with more computational effort. A standard Gauss-Seidel solver is used for more than two groups.
58
(a) Neutron Loss Operator, M
(b) Neutron Production Operator, F
Figure 3.3. Sparsity of CMFD matrices.
59
Besides a power iteration, a Jacobian-free Newton-Krylov method was also implemented to obtain eigenvalue and multigroup fluxes [30, 34]. This method is not the
primary one used, but has gotten recent attention due to its coupling advantages to
other physics such as thermal hydraulics. Once multigroup fluxes are obtained, a normalized fission source is calculated in the code using eq. (3.16) directly.
The next step in the process is to compute weight adjustment factors. These are calculated by taking the ratio of the expected number of neutrons from the CMFD source
distribution to the current number of neutrons in each mesh. It is straightforward to
compute the CMFD number of neutrons because it is the product between the total
starting initial weight of neutrons and the CMFD normalized fission source distribution. To compute the number of neutrons from the current MC source, a subroutine
was implemented to sum the statistical weights of neutrons from the source bank on a
given spatial and energy mesh. Once weight adjustment factors were calculated, each
neutron’s statistical weight in the source bank was modified according to its location
and energy.
3.4
toy problem example
Before applying CMFD to a large reactor, a simple 1-D slab toy problem was analyzed
to understand how CMFD works. Table 3.2 presents data used to construct this problem. For CMFD, the mesh was 2 cm over the geometry with one energy group. A
comparison of fission source convergence using Shannon entropy is shown in fig. 3.4.
The figure illustrates that it takes about 150 FSGs (equivalent to batches) to converge
the source with standard MC without CMFD. For the case with CMFD, it is activated
at batch 11 and directly affects the fission source for batch 12. Convergence of the
fission source is almost immediately reached.
To further show this convergence, source distributions were edited at various batches
and compared. Figure 3.5 compares the OpenMC source distribution from the no
CMFD case, the OpenMC source distribution from the CMFD case and the CMFD
source distribution for six different batches. Figure 3.5a compares the distributions at
batch 6. Here, CMFD has not been activated yet, so it is just plotted at zero. As expected, the OpenMC source distributions from the two cases are equal because CMFD
has not yet affected it. From this plot, one can also see that the source distribution
is very flat because the initial guess was uniform over space. Because the dominance
ratio is close to unity, the source will slowly converge to a cosine-like shape. Results
from batch 10 are presented in fig. 3.5b. The same information is shown in this plot,
but the source is slightly more converged. It is plotted here to show how little the
source changes in four batches. Batch 11 is the first time a CMFD source is calculated. Right away, it appears as a smooth cosine-like shape as shown in fig. 3.5c. Thus,
60
Table 3.2. Input data for 1-D slab toy problem.
Slab Length
200 cm
Homogeneous material of UO2
19 g/cc densitya
U-235 weight percent
0.21
U-238 weight percent
0.68
O-16 weight percent
0.11
Number of particles per FSG
4,000,000
Number of inactive FSGs
400
a This
density is fictitious and was altered along with
geometry to produce a system with very high dominance
ratio.
6.64
No CMFD
CMFD
6.62
Shannon Entropy
6.6
6.58
6.56
6.54
6.52
6.5
6.48
6.46
6.44
0
50
100
150
200
250
300
350
Batch
Figure 3.4. Source convergence comparison for 1-D slab toy problem.
61
400
1.6
1.6
1.4
1.4
1.2
1.2
1
Flux [-]
Flux [-]
1
0.8
0.6
0.6
0.4
0.4
CMFD Fission Source - CMFD Case
OpenMC Fission Source - Base Case
OpenMC Fission Source - CMFD Case
0.2
0
0.8
0
20
40
60
80
100
120
140
CMFD Fission Source - CMFD Case
OpenMC Fission Source - Base Case
OpenMC Fission Source - CMFD Case
0.2
160
180
0
200
0
20
40
60
Slab Position [cm]
(a) FSG 6
Batch number 11
1.4
1.4
1.2
1.2
140
160
180
200
160
180
200
160
180
200
1
Flux [-]
Flux [-]
1
0.8
0.6
0.8
0.6
0.4
0.4
CMFD Fission Source - CMFD Case
OpenMC Fission Source - Base Case
OpenMC Fission Source - CMFD Case
0.2
0
20
40
60
80
100
120
140
CMFD Fission Source - CMFD Case
OpenMC Fission Source - Base Case
OpenMC Fission Source - CMFD Case
0.2
160
180
0
200
0
20
40
60
Slab Position [cm]
80
100
120
140
Slab Position [cm]
(c) FSG 11
(d) FSG 12
Batch number 40
Batch number 200
1.6
1.6
1.4
1.4
1.2
1.2
1
Flux [-]
1
Flux [-]
120
Batch number 12
1.6
0.8
0.6
0.8
0.6
0.4
0.4
CMFD Fission Source - CMFD Case
OpenMC Fission Source - Base Case
OpenMC Fission Source - CMFD Case
0.2
0
100
(b) FSG 10
1.6
0
80
Slab Position [cm]
0
20
40
60
80
100
120
140
CMFD Fission Source - CMFD Case
OpenMC Fission Source - Base Case
OpenMC Fission Source - CMFD Case
0.2
160
180
200
Slab Position [cm]
0
0
20
40
60
80
100
120
140
Slab Position [cm]
(e) FSG 40
(f) FSG 200
Figure 3.5. Comparison of OpenMC and CMFD source distributions at various FSGs.
when CMFD is fed back, its source shape will modify the OpenMC source bank to
preserve this distribution on the CMFD mesh. On the next batch, shown in fig. 3.5d,
the OpenMC source and the CMFD source from the CMFD case match, while the
OpenMC source from the no CMFD case lags behind. Two more batches are shown
in fig. 3.5e and fig. 3.5f to illustrate that all source distributions eventually line up at
batch 200.
This simple illustration shows the power of NDA. Because of the nature of the diffusion equation, it can propagate and dampen higher harmonics much faster than the
MC transport solution. It should be noted here that this is a very simplified problem
where the dominance ratio was increased by changing the size of the slab. Also, the
source distribution is very smooth and there was only one homogeneous material. The
62
problem becomes more difficult to solve when expanding to more spatial dimensions
and complex materials.
Highlights
• A generic derivation of CMFD was presented as well as how it was implemented in the continuous-energy MC code OpenMC.
• An acceleration map was introduced to solve the issue where good tally
estimates are needed far away from fission source regions. At the interface between accelerated and non-accelerated regions, an albedo boundary
condition is calculated from MC partial current tallies.
• CMFD matrices are very sparse, greater than 99%.
• CMFD is very effective at converging fission source in a simple 1-D slab
toy problem.
63
4
R E A C T O R S I M U L AT I O N S U S I N G N D A
4.1
introduction
This chapter studies CMFD acceleration of the BEAVRS reactor core model. It is important to test CMFD on such complex geometries that do not hide the simplicities of
a 1-D homogeneous slab with one energy group. We begin this chapter by focusing
on the initial CMFD feedback step in order to understand the characteristics of source
distributions when diffusion parameters are obtained from unconverged tallies. The
majority of this chapter employs a two energy group CMFD analysis with an assembly
size mesh on the 2-D BEAVRS model, but with the following varying conditions:
• tally estimator (analog and tracklength),
• number of histories per FSG,
• tally resetting to reduce and remove any bias,
• effective down-scatter cross section in two-group analysis,
• CMFD spatial mesh,
• CMFD energy mesh and
• diffusion coefficient definitions.
At the end, we analyze CMFD on the 3-D BEAVRS model and study other applications
of CMFD such as reducing correlation, and generating higher harmonic and adjoint
distributions.
4.2
initial cmfd source distribution
The first CMFD feedback step is very important. In this section, we study CMFD
fission source distributions before they are fed back to the MC source bank. To perform this study, the BEAVRS 2-D core was used with 100 million neutrons per FSG.
This is equivalent to 100 million neutrons used in a tally batch for CMFD diffusion
parameters because this takes place during inactive batches. To begin, CMFD fission
source distributions were plotted with tallies from batch 1 and batch 2. Between these
batches, tally bins were reset to zero. Fission source distribution results are shown in
fig. 4.1 from an initial uniform source guess over the whole domain containing the
64
core. The results show that the first predicted fission source by CMFD is completely
erroneous, while the second batch distribution is much closer to the true fission source
distribution. Because initial tallies are so inaccurate that they produce a poor initial
CMFD source distribution, tallies should always be reset after the first batch. If not,
these tallies will continue to impact the CMFD source distributions long after the first
batch.
The next question to be answered is why are the results from the first batch so
skewed with a peaking factor nearing 60. The reason is that we started with a uniform fission source over the whole domain including the entire spatial domain inside
the pressure vessel. In this case, a significant number of neutrons were started in surrounding reflector regions and other non-fissionable areas. These neutrons streamed
into the core, resulting in an artificial source of neutrons which skews tally estimates.
To prove this, a modified uniform source was used where source sites were rejected
if they were placed in a region with no fissionable material. This rejection sampling
scheme was performed at the beginning of OpenMC simulations with little overhead.
Results of the same two distributions are shown in fig. 4.2 employing this new uniform
fissionable material source. The first batch’s CMFD source distribution shows better
agreement, but still has a relatively high peaking factor of 3 and a tilt compared to the
true fission source distribution. Even with this initial guess, it is still recommended
to reset CMFD tallies after the first batch. This will be performed for all simulations
presented in the rest of this chapter.
When using CMFD acceleration during FSGs, it is recommended to use a uniform initial source in fissionable regions, rather than a uniform source over all
regions. This leads to better CMFD tallies after the first FSG. At the very least,
discard CMFD tallies after the first FSG.
4.3
biased cmfd tallies
During the initial iterations of CMFD, diffusion parameters are calculated from an
approximate flux spectrum. This means that there is a potential for these parameters
to be biased as the solution progresses and thus produce a biased source distribution.
However, during initial iterations, CMFD helps converge the source more rapidly than
non-accelerated iterations, even though there might be a bias. Before discussing how
to remove bias, results are presented to show the behavior of CMFD for the BEAVRS
2-D model without considering bias. Figure 4.3 shows Shannon entropy convergence
results for 1, 5 and 20 million neutrons per FSG compared to the converged value of a
case without CMFD. As shown, all three curves approach the same Shannon entropy
65
60
350
300
50
250
40
200
30
150
20
100
10
50
0
0
0
50
100 150 200 250 300 350
(a) Batch 1
1.8
350
1.6
300
1.4
250
1.2
200
1
0.8
150
0.6
100
0.4
50
0.2
0
0
0
50
100 150 200 250 300 350
(b) Batch 2
Figure 4.1. CMFD fission source using initial uniform box source on the 2-D BEAVRS model.
66
3
350
300
2.5
250
2
200
1.5
150
1
100
0.5
50
0
0
0
50
100 150 200 250 300 350
(a) Batch 1
1.8
350
1.6
300
1.4
250
1.2
200
1
0.8
150
0.6
100
0.4
50
0.2
0
0
0
50
100 150 200 250 300 350
(b) Batch 2
Figure 4.2. CMFD fission source using initial uniform source only in fissionable materials on
the 2-D BEAVRS model.
67
at the end; however, the 1 million case is slightly biased and does not converge like
the other cases. The best case is, of course, the 20 million because many neutrons were
simulated before calculating CMFD parameters. Note that at each CMFD calculation,
diffusion parameters were generated from tallies that were accumulated since batch 2.
Another observation from fig. 4.3 is that as the number of histories increases, the initial
depression in Shannon entropy becomes smaller. Thus, the first CMFD distribution has
a large effect on the behavior of CMFD after activation. As the number of neutrons
increases, the sooner a steady convergence level is achieved.
The Shannon entropy information did not really show the effect of bias even when
the number of neutrons simulated was large. To highlight this effect more clearly,
the CMFD eigenvalue was plotted as a function of CMFD iteration and results are
presented in fig. 4.3. The convergence to the final CMFD eigenvalue is very slow and
the final values are just below one standard deviation of the converged eigenvalue
without CMFD. This is due to bias in the diffusion parameters, where tallies have
been accumulated since the beginning of the simulation. In section 4.3.2, the removal
of this bias is discussed.
4.3.1 Tracklength vs. Analog Tallies
Two tally estimators are present in OpenMC. All results presented so far used tracklength estimators to calculate diffusion parameters. In this section, we show similar
results for analog estimators where tallies are only scored when an event that matches
that specific tally bin occurs. Figure 4.4 presents the results for Shannon entropy and
CMFD eigenvalue. The first observation is that the initial drop in Shannon entropy
once CMFD begins is a lot more pronounced compared to fig. 4.3 which is plotted
on the same scale. In addition, the 1 million analog tally case is less accurate than
the 1 million tracklength tally case. This implies that, for the same number of histories, tracklength tallies yield a better result because they are scoring to each tally bin
no matter the event that has occurred. As the number of particles increases, the two
Shannon entropy convergence rates become approximately the same because the two
estimators will agree in the limit of infinite particles. The behavior of the CMFD eigenvalue in the analog tally case is quite different than the tracklength tally case. First, the
1 million case does not exhibit a good convergence rate compared to the other cases
and is biased at the end of the simulation. However, for a larger number of neutrons,
the convergence to the eigenvalue is faster than in the tracklength tally case. There
could be many reasons for this, and it may take more simulations to fully understand
this behavior. Tally resetting, discussed in the next section, changes this behavior and
faster convergence is obtained.
68
50
7.585
Shannon entropy
7.58
7.575
7.57
7.565
7.56
7.555
1 million
5 million
20 million
Converged entropy
7.55
7.545
0
50
100
150
200
Batch
(a) Shannon entropy fission source convergence
1.0037
1.0036
1 million
5 million
20 million
Converged entropy
1.0035
CMFD Eigenvalue
0
7.59
1.0034
1.0033
1.0032
1.0031
1001.003
150
1.0029
Batch
1.0028
1.0027
200
1 million
5 million
20 million
Converged mean k-effective +1 std. dev.
Converged mean k-effective
Converged mean k-effective -1 std. dev.
0
50
100
150
200
CMFD Iteration
(b) CMFD eigenvalue convergence
Figure 4.3. Convergence of fission source iterations using tracklength tallies on the 2-D
BEAVRS model.
1 million
5 million
20 million
Converged mean k-effective +1 std. dev.
Converged mean k-effective
69 dev.
Converged mean k-effective -1 std.
100
150
200
7.59
7.585
Shannon entropy
7.58
7.575
7.57
7.565
7.56
7.555
1 million
5 million
20 million
Converged entropy
7.55
7.545
0
50
100
150
200
Batch
(a) Shannon entropy fission source convergence
1.0046
1.0044
CMFD Eigenvalue
1.0042
1.004
1.0038
1.0036
1 million
5 million
20 million
Converged mean k-effective +1 std. dev.
Converged mean k-effective
Converged mean k-effective -1 std. dev.
1.0034
1.0032
1.003
0
50
100
150
200
CMFD Iteration
(b) CMFD eigenvalue convergence
Figure 4.4. Convergence of fission source iterations using analog tallies on the 2-D BEAVRS
model.
70
4.3.2 CMFD Tally Resets
This section discusses the tally resetting procedure to reduce bias in CMFD diffusion
parameters which adds another degree of freedom in CMFD accelerated simulations.
In this procedure, users select batches to reset tallies. During a tally reset, the sum
and sum_sq attributes of an OpenMC tally object are reset to zero. Thus, when tallying takes place during the subsequent batch, summations begin at zero similar to the
beginning of the MC simulation. Tally resetting procedures may be problem dependent, so a study may have to be performed for each specific reactor model. Results
for the 2-D BEAVRS reactor are presented in fig. 4.5. These simulations used 20 million neutrons in an FSG. The Shannon entropy convergence now shows depressions
as the source is converging. These occur due to resetting CMFD tally bins. To look at
the sensitivity of this, four simulations were performed: (1) reset tallies once at batch
10, (2) reset tallies once at batch 15, (3) reset tallies once at batch 20 and (4) reset tallies twice, once at batch 10 and once at batch 20. From the Shannon entropy plot in
fig. 4.5, all cases converge. The case with resetting once at batch 10 is the best because
it converges the quickest.
In the CMFD eigenvalue plot shown in fig. 4.5, the tally reset at batch 10 seems to
be the best again. When resetting occurs, the curves immediately jump up to the converged eigenvalue from the base case without CMFD. The case that has resetting at
batch 15 seems to have a slight bias compared to the other simulations. The case with
resetting at batch 20 produces a very large spike in the CMFD eigenvalue estimate,
whereas resetting at 10 and 20 is fairly stable as well. These figures illustrate that without resetting to remove the initial bias, the convergence even with CMFD acceleration
can be slow.
4.3.3 Moving Window CMFD Tally Resets
Lee et al. proposed a multiset CMFD strategy to reduce depressions observed in fig. 4.5
by waiting to run CMFD after a couple of FSGs [18]. In this section, an alternate approach is proposed where instead of resetting to get rid of the bias, the bias is slowly
removed over time by implementing a tally accumulation window. This approach
involves the user selecting an appropriate tally accumulation window batch length.
As batches are simulated, tallies accumulated in that specific batch are saved in a window replacing the oldest batch. In a sense, this is a moving tally window where biased
old tallies are replaced by less biased newer tallies. To compute diffusion parameters,
tallies must be summed over the window first, so there is an extra step between reading tallies and computing diffusion parameters. The accumulated tallies of integrated
fluxes, reaction rates and net currents are then used to compute cross sections, diffu-
71
7.59
No tally resets
Tally reset at batch 10
Tally reset at batch 15
Tally reset at batch 20
Tally reset at batches 10 and 20
Converged entropy
7.588
Shannon entropy
7.586
7.584
7.582
7.58
7.578
7.576
7.574
7.572
0
10
20
30
40
50
60
70
80
Batch
(a) Shannon entropy fission source convergence
1.0039
1.0038
CMFD Eigenvalue
1.0037
1.0036
1.0035
1.0034
No tally resets
Tally reset at batch 10
Tally reset at batch 15
Tally reset at batch 20
Tally reset at batches 10 and 20
Converged mean k-effective +1 std. dev.
Converged mean k-effective
Converged mean k-effective -1 std. dev.
1.0033
1.0032
1.0031
1.003
1.0029
0
50
100
150
200
CMFD Iteration
(b) CMFD eigenvalue convergence
Figure 4.5. Convergence of fission source iterations when resetting CMFD tallies at specific
batches on the 2-D BEAVRS model.
72
sion coefficients, etc. Results of this new approach are shown in fig. 4.6. Four different
cases are presented: (1) tally window of 5 batches with 20 million neutrons simulated
per FSG, (2) tally window of 10 batches with 20 million neutrons simulated, (3) 15
batch tally window with 20 million neutrons simulated and (4) a 40 million neutron
per FSG with a tally window of 10 batches. Results show that a window of 5 batches is
too small because convergence is too oscillatory. Source convergence improves with a
larger tally window because more samples are being used to compute CMFD parameters. When comparing the 10 batch window with 20 million and 40 million neutrons
per FSG, having a larger number of neutrons simulated per FSG results in better convergence behavior, as expected.
There is one interesting behavior in the results. Depending on the tally window
size, upward spikes occur in Shannon entropy. This is a direct result of overwriting
the first tally batch that was saved to the window. When CMFD is first initialized at
the end of batch 5, tallies are placed in the first slot in the moving tally accumulation
window. These tallies represent the accumulation of tallies between batches 2-5. We
want to have enough tally information for that first crucial CMFD feedback step. When
CMFD is run at the end of batch 6, batch 6’s tallies will be placed in the second tally
window location, and so on. There will be one CMFD step that will have tallies from
batches 2-9 in the 5 batch tally window. On batch 10, tallies will replace the oldest
tally slot because they are now all filled. Thus, tallies 2-5 are eliminated because they
occupy the first slot. Now instead of having 8 batches of tally information, we actually
have 5 as the tally window suggests. The resulting behavior of this decrease in tally
batches produces a spike in the entropy.
Shifting the focus to the batch-wise CMFD eigenvalues in fig. 4.6, again the 5 batch
window produces noisy data, but it is oscillating about the final converged eigenvalue. As expected, as the window size or particle size increases, oscillations decrease.
Comparing this to tally resetting at a specific batch, it is slightly worse for the same
number of simulated neutrons. This is a direct result of the number of scores accumulated in the window at any given time. However, a moving window is more stable
than tally resetting and gradually eliminates all bias without causing large discontinuities that could lead to stability issues. This will become important when discussing
TH feedback in chapter 5. Point resetting must be applied every time TH conditions
are fed back to MC. With this new moving tally accumulation window, the effects of
transitioning from one TH state to another will be gradual and more stable.
It is recommended to reset tallies as CMFD acceleration takes place whether
at specific batches or a moving window to remove initial tally bias.
73
7.59
No tally resets
5 batch tally window - 20 million
10 batch tally window - 20 million
15 batch tally window - 20 million
10 batch tally window - 40 million
Converged entropy
7.588
Shannon entropy
7.586
7.584
7.582
7.58
7.578
7.576
7.574
7.572
0
50
100
150
200
Batch
(a) Shannon entropy fission source convergence
1.0038
1.0037
CMFD Eigenvalue
1.0036
1.0035
1.0034
1.0033
No tally resets
5 batch tally window - 20 million
10 batch tally window - 20 million
15 batch tally window - 20 million
10 batch tally window - 40 million
Converged mean k-effective +1 std. dev.
Converged mean k-effective
Converged mean k-effective -1 std. dev.
1.0032
1.0031
1.003
1.0029
1.0028
0
50
100
150
200
CMFD Iteration
(b) CMFD eigenvalue convergence
Figure 4.6. Convergence of fission source iterations when resetting CMFD tallies using a moving window on the 2-D BEAVRS model.
74
4.4
effective down-scatter cross section
In all simulations presented so far, an effective down-scattering macroscopic cross
section was used instead of a 2x2 group-to-group scattering matrix that contains upscattering from the thermal to fast group. Because relatively fewer neutrons up-scatter
in energy from group 2 to group 1, this tally bin has fewer samples than the other
group-to-group tally bins such as down-scatter. Computing an effective down-scatter
cross section preserves neutron balance but removes the up-scattering cross section.
An effective down scattering cross section is defined as
1→2
νd
s Σsl,m,n
≡
1→2
νs Σsl,m,n
2→1
− νs Σsl,m,n
2
φl,m,n
1
.
(4.1)
φl,m,n
Before CMFD matrices are constructed, this effective down-scatter cross section is
calculated and the up-scattering cross section is set to zero. Two simulations were performed where 20 million neutrons per FSG were simulated: one with and one without
effective down-scattering. In each of these cases, CMFD tallies were reset at batch
10. Results for Shannon entropy and CMFD eigenvalue are shown in fig. 4.7. In the
Shannon entropy plot, convergence behaviors with and without effective down-scatter
cross section are very similar, except the effective down-scatter case converges quicker.
This is also observed in the CMFD eigenvalue trends. There is a significant bias in
final eigenvalue when not calculating the effective down-scatter cross section. This is
not to say that one must always use an effective down-scatter cross section. Rather, it
means that with the tally resetting scheme used here, the bias was not reduced sufficiently when using an up-scatter cross section. Unless otherwise specified, we will
use an effective down-scatter cross section for all two group simulations to reduce the
sensitivity of having an up-scattering cross section.
When solving reactor problems with little to no up-scattering, it is recommended to use an effective down-scatter cross section.
Using an effective down-scattering cross section will also be very important when
performing TH feedback. All of the classic kinetics benchmarks provide effective
down-scatter cross sections and their dependence on various conditions TH conditions such as coolant density and fuel temperature. This will reduce the number of
diffusion parameters during the interpolation stage when performing TH feedback,
as well as reduce the sensitivity of performing this interpolation on an up-scattering
cross section.
75
7.59
No effective downscatter xs
Effective downscatter xs
Converged entropy
7.588
Shannon entropy
7.586
7.584
7.582
7.58
7.578
7.576
7.574
7.572
0
10
20
30
40
50
Batch
(a) Shannon entropy fission source convergence
1.0038
1.0037
CMFD Eigenvalue
1.0036
1.0035
1.0034
1.0033
1.0032
No effective downscatter xs
With effective downscatter xs
Converged mean k-effective +1 std. dev.
Converged mean k-effective
Converged mean k-effective -1 std. dev.
1.0031
1.003
1.0029
0
50
100
150
200
CMFD Iteration
(b) CMFD eigenvalue convergence
Figure 4.7. CMFD convergence results using effective downscatter cross section instead of full
scattering matrix on the 2-D BEAVRS model.
76
4.5
spatial mesh
A spatial mesh study was performed to determine the effect of reducing the CMFD
spatial mesh size and thereby reducing spatial truncation error. Up to this point, all
CMFD meshes have been assembly-sized. In this section, two additional meshes are
tested: quarter assembly and pin. Each of these cases were simulated with the same
number of neutrons per FSG, 20 million. At batch 10, tally bins are reset to zero. Source
convergence and CMFD eigenvalue results are presented in fig. 4.8. Both sets of results
do not show any gain by using a smaller mesh to achieve faster acceleration. Note,
because there are more mesh cells, the computational effort to solve these finer CMFD
systems is larger and acceleration results observed do not outweigh the computational
cost. In Shannon entropy results, a larger depression is presented when CMFD is first
activated for smaller meshes. This is because tally estimates on a finer mesh, such as
pins, have less samples than assembly meshes. Thus, to really get a fair comparison
289 times more neutrons need to be simulated to achieve, on average, the same track
density. From the results, the assembly mesh converges fairly quickly and it is not
worthwhile to perform simulations with this extra computational effort.
For the BEAVRS benchmark problem, it is recommended to use an assemblysized CMFD mesh.
4.6
energy mesh
CMFD acceleration was studied with different energy group structures taken from
CASMO [2]. Table 4.1 lists the energy group boundaries for each case. A simulation
was performed for each energy group structure using 20 million neutrons per FSG
with no effective down-scatter cross section. Results are shown in fig. 4.9. Looking at
Table 4.1. CMFD energy group structures.
# of groups
groups boundaries
1
N/A
2
0.625 eV
4
0.625 eV
5.53080 eV
820.85 keV
8
0.625 eV
9.87500 eV
16.0e eV
27.7 eV
47.9 eV
9.11880 keV
820.85 keV
77
7.59
Assembly Mesh
Quarter Assembly Mesh
Pin Mesh
Converged entropy
7.588
Shannon entropy
7.586
7.584
7.582
7.58
7.578
7.576
7.574
7.572
7.57
0
10
20
30
40
50
Batch
(a) Shannon entropy fission source convergence
1.0044
1.0042
CMFD Eigenvalue
1.004
1.0038
1.0036
1.0034
Assembly Mesh
Quarter Assembly Mesh
Pin Mesh
Converged mean k-effective +1 std. dev.
Converged mean k-effective
Converged mean k-effective -1 std. dev.
1.0032
1.003
1.0028
0
10
20
30
40
50
CMFD Iteration
(b) CMFD eigenvalue convergence
Figure 4.8. Comparison of CMFD acceleration using the 2-D BEAVRS model for different spatial meshes.
78
the Shannon entropy first, the initial drop in the Shannon entropy when CMFD is first
activated becomes smaller as the number of energy groups increases. Also, sensitivity
due to resetting tallies also decreases. No real conclusions can be made from CMFD
eigenvalue trends except that having one energy group is not as good as having two or
more. This is similar to conventional reactor analysis methods for commercial LWRs
where two groups are used. Some of the trends converge to solutions outside of the
acceptable range, but this is due to tally bias similar to what was observed in fig. 4.7.
In these simulations, no effective down-scattering cross sections were used and thus
some bias is present when only resetting at batch 10. One of the main reasons why 4
and 8 group results look a little better than the 2 groups is due to the calculation of
two group diffusion coefficients. Collapsing transport cross sections into few groups
and then computing diffusion coefficients from them does not yield the best representation of leakage. As the number of groups increases, this error is reduced and better
convergence is observed. Thus, one cannot conclude from these data that we should
use more energy groups. In section 4.7, a new procedure for collapsing diffusion coefficients will be presented and 2 group results are regenerated with a more appropriate
group collapse.
It is recommended to use two energy groups for CMFD acceleration of the
BEAVRS reactor.
4.7
diffusion coefficient
Using proper diffusion coefficients during CMFD can help accelerate convergence and
decrease sensitivity of equivalence factors. Current approximations and improvements
to the calculation of diffusion coefficients will be reviewed in this section. Recently,
it was observed that diffusion coefficients were being severely mispredicted when
generating single assembly lattice parameters [35]. This observation led to a more indepth study on how MC codes predict diffusion coefficients. From this study, it was
concluded that the following approximations are made:
1. out-scatter approximation is assumed,
2. all tallies that are used to compute diffusion coefficients are flux weighted, and
3. the transport cross section is collapsed to few groups before diffusion coefficient
is calculated.
The out-scatter approximation of the diffusion coefficient will be discussed first. The
notation and derivation of this approximation is taken from Stamm’ler and Abbate
79
7.59
1 Energy Group
2 Energy Groups
4 Energy Groups
8 Energy Groups
Converged entropy
Shannon entropy
7.585
7.58
7.575
7.57
7.565
7.56
0
10
20
30
40
50
Batch
(a) Shannon entropy fission source convergence
1.004
CMFD Eigenvalue
1.0038
1.0036
1.0034
1 Energy Group
2 Energy Groups
4 Energy Groups
8 Energy Groups
Converged mean k-effective +1 std. dev.
Converged mean k-effective
Converged mean k-effective -1 std. dev.
1.0032
1.003
1.0028
0
10
20
30
40
50
CMFD Iteration
(b) CMFD eigenvalue convergence
Figure 4.9. Comparison of CMFD acceleration for different numbers of energy groups on the
2-D BEAVRS model.
80
[36]. Note that in this notation, the (n, xn) reactions are lumped into the scattering
cross section and the fission production term is represented by a fission spectrum, χ.
The first and second time-independent P1 equations without external sources are
Z ∞
∇ · ~J (~r, E) + Σt (~r, E) φ (~r, E) =
+
0
Σs,0 ~r, E0 → E φ ~r, E0 dE0
χ (~r, E)
ke f f
∇φ (~r, E) + 3Σt (~r, E) ~J (~r, E) = 3
Z ∞
0
Z ∞
0
(4.2)
νΣ f ~r, E0 φ ~r, E0 dE0
Σs,1 ~r, E0 → E ~J ~r, E0 dE0 .
(4.3)
The parameters in eq. (4.2) and eq. (4.3) are
• ~J (~r, E) – neutron current,
• Σt (~r, E) – macroscopic total cross section,
• φ (~r, E) – scalar neutron flux,
• Σs,0 (~r, E0 → E) – macroscopic P0 scattering cross section kernel,
• χ (~r, E) – fission neutron emission spectrum,
• k e f f multiplication factor,
• νΣ f (~r, E0 ) – macroscopic fission neutron production cross section, and
• Σs,1 (~r, E0 → E) – macroscopic P1 scattering cross section kernel.
Although we have explicitly included the dependence of space, we will focus on the
energy variable and let MC perform spatial homogenization. To obtain an expression
for the diffusion coefficient, eq. (4.3) must be solved for scalar current. This yields the
following expression:
1
~J (~r, E) = − h
i ∇φ (~r, E) .
R
∞
0 → E ) ~J (~r, E0 ) dE0
3 Σt (~r, E) − ~ 1
Σ
r,
E
(~
s,1
J (~r,E) 0
(4.4)
The diffusion coefficient is defined as the term in front of the gradient,
D (~r, E) =
1
h
3 Σt (~r, E) − ~
1
J (~r,E)
R∞
0
Σs,1 (~r, E0 → E) ~J (~r, E0 ) dE0
i.
(4.5)
To calculate this diffusion coefficient properly, an integral over the in-scatter energy
transfer reaction must be weighted by the current spectrum. This can be very difficult
to calculate, especially in MC. Equation (4.5) also has vector division. This term only
makes sense if the spatial components of current have the same energy dependence
81
[36]. Thus, we can think of this term and the current inside the integral as the magnitude of the current spectrum. According to Stamm’ler and Abbate, if the medium
is weakly absorbing, the in-scatter rate of neutrons from energies E0 to E will approximately balance the out-scatter rate of neutrons from E to all other energies, E0 . The
out-scatter approximation is represented as
Z ∞
0
Z
Σs,1 ~r, E0 → E ~J ~r, E0 dE0 ≈
∞
0
Σs,1 ~r, E → E0 ~J (~r, E) dE0 .
(4.6)
The current spectrum inside the integral for the out-scatter rate does not depend on
all other energies, E0 . Thus, it is just an integral over the P1 scattering cross section
that can be rewritten as the average cosine angle multiplied by the P0 scattering cross
section,
Z ∞
0
Σs,1 ~r, E → E0 dE0 · ~J (~r, E) = µ0 (~r, E) Σs,0 (~r, E) ~J (~r, E) .
(4.7)
Substituting eq. (4.7) into eq. (4.5) yields an expression for the recognizable out-scatter
approximated diffusion coefficient,
D (~r, E) =
1
1
=
.
3 [Σt (~r, E) − µ0 (~r, E) Σs,0 (~r, E)]
3Σtr (~r, E)
(4.8)
It should be noted that the term in brackets in the denominator is commonly referred
to as transport cross section, Σtr . This diffusion coefficient is very easy to tally in MC.
OpenMC has the capability to tally both total and P1 scattering cross sections.
The second approximation made in OpenMC to calculate diffusion coefficients is to
first tally few group transport cross sections and then use eq. (4.8) to obtain diffusion
coefficients. This is highlighted in the following equation:
g
g
Σtrl,m,n =
g
D trl,m,n
hΣtr φil,m,n
g
hφil,m,n
1
= g
.
3Σtrl,m,n
g
g
=
hΣt φil,m,n − hΣs,1 φil,m,n
g
hφil,m,n
,
(4.9)
This will severely mispredict the true value of diffusion coefficients because of the
energy collapse of the transport cross section. Instead, one should tally a fine energy
group distribution of transport cross sections, convert them to a fine energy group
distribution of diffusion coefficients and then collapse these to a few group energy
structure. This can be accomplished using the following approximation:
g0
g
D l,m,n
=
g0
∑ g0∈ g D l,m,n hφil,m,n
g0
∑ g0∈ g hφil,m,n
.
(4.10)
82
The finer the energy group, the better the energy collapse will be. To prove that this
preserves leakage better, a 1-D homogeneous slab thought experiment is used as an
example. The goal is always to preserve neutron balance. Reaction rates are conserved
by computing consistent macroscopic cross sections. The net group leakage rate integrated over the entire homogeneous slab can be related to the buckling
g0
g0
g0
L = D B2g0 φ W,
(4.11)
g0
where L is the group leakage, B2g is the energy group buckling and W is the width of
the slab. To conserve leakage, the appropriate few group diffusion coefficient should
be:
g0
g
D =
g0
∑ g0∈ g D l,m,n B2g0 φ W
g0
∑ g0∈ g B2g0 φ W
.
(4.12)
For a homogeneous slab, the buckling is group independent and therefore drops out of
the equation yielding the same result as eq. (4.10). Thus, in a 1-D homogeneous slab,
it does not matter if you weight the diffusion coefficient by current or flux because
the buckling is independent of energy. This is not the case with more complicated
geometries.
4.7.1 Derivation of Hydrogen In-scatter Correction
To illustrate how the out-scatter approximation affects the diffusion coefficient, a 1D slab of pure H-1 will be used. Hydrogen is a good example because it is very
anisotropic in the lab and is prevalent in reactor systems. To begin, an expression of
the diffusion coefficient is used in the context of homogeneous B1 theory as derived
by Hérbert [29]:
Z ∞
1
3
0
0
0
0
D ( E) =
1+
dE Σs,1 E → E D E φ E .
3Σt ( E)
φ ( E) 0
(4.13)
The assumption in this example is that the slab is very wide such that the buckling
is almost zero. Thus, in Hébert’s derivation, there is an extra γ term present, but it
goes to unity as the buckling approaches zero. In order to solve this equation, an
expression for the flux is required. For simple slowing down in Hydrogen with an
arbitrary neutron source, the flux is
φ ( E) =
1
Σt ( E)
Z E0
E
dE0
Σs,0 ( E0 )
S ( E)
.
+
0
Σt ( E)
(1 − α ) E
83
(4.14)
1.1
Out-scatter Approx
Σtr(E)/Σt(E)
1
20b cross section - point source 4 MeV
0.9
H-1 cross section - point source 4 MeV
0.8
H-1 cross section - χ source
0.7
0.6
0.5
0.4
0.3
0.2
10-8
10-6
10-4
10-2
100
102
Energy [MeV]
Figure 4.10. Comparison of in-scatter transport to total cross section with out-scatter approximation.
In eq. (4.14), α = ( A − 1)2 /( A + 1)2 with A being the mass number of an isotope,
S( E) is a neutron source term and E0 is the highest energy of the system. This model
assumes that neutrons lose energy via simple elastic scattering. Substituting eq. (4.14)
into eq. (4.13) and solving for the ratio between transport cross section (defined in
eq. (4.8)) and total cross section yields:
Z E0
0
0
0 −1
1
Σtr ( E)
0 µ0 ( E ) Σs,0 ( E ) φ ( E )
.
= 1+
dE
f ( E) ≡
Σt ( E)
φ ( E) E
Σ t ( E 0 ) (1 − α ) E 0 f ( E 0 )
(4.15)
Equation (4.15) represents an equation that depends only on cross sections and the
energy-dependent average scattering cosine. To solve for this ratio, one can sweep
through energies from high to low, assuming that the ratio goes to unity at the highest
energy. Then at each energy point, the flux can be calculated from eq. (4.14) and used
in eq. (4.15). Cross sections for this analysis were taken from H-1 ACE data, and the
average scattering cosine was assumed to be 2/3 for hydrogen.
Using this in-scatter model, a comparison can be made to the out-scatter approximation. For a slab of H-1, the ratio of transport to total cross section is 1/3 if we
assume that average scattering cosine is independent of energy at 2/3 and there is
negligible absorption. Figure 4.10 compares this value to three different situations in
the fast energy range: (1) a point source at 4 MeV assuming that scattering and total cross sections are at 20 b, (2) a point source at 4 MeV with true representation of
H-1 cross sections, and (3) a Watt fission source with H-1 cross sections. In this plot,
there is a large error in the out-scatter approximation. The first example shown is just
84
slowing down from a 4 MeV point source in a constant 20 b material. At the highest
energy, the ratio has to be unity. As the energy decreases, the ratio approaches the outscatter approximation below the source energy. By having a source, this out-scatter
approximation is not accurate. For the case that used real hydrogen cross section data,
the curve goes below the out-scatter approximation and then approaches it again far
away from the source. This is because the hydrogen scattering cross section decreases
at higher energies. For the last example, the neutron source is changed from a point
in energy to a Watt fission distribution in energy. Thus, the behavior near the source
at really high energies is different, but approaches the previous example as the energy
decreases. This is, however, the most important part because high energy neutrons are
very important for leakage. This model does not account for thermal energy range
and the fact that the average scattering cosine is not purely independent of energy at
2/3. In the following sections, Monte Carlo and P1 theory are used to generate the
transport-to-total in-scatter correction curve for slowing down in hydrogen.
Hydrogen In-scatter Correction Curve using Monte Carlo
4.7.1.1
To generate the transport-to-total in-scatter correction curve using MC, a large slab of
100 cm is used such that the buckling is small. A fixed source MC simulation with a
total of 160 neutron batches using 1 billion neutrons per tally batch was run. The fixed
source was a buckled cosine spatially and a Watt fission spectrum in energy. Hydrogen
material was used with light water S (α, β) tables at an atom density of 0.4780 atom/bcm. An inner tally region of 60 cm was used to compute 70 energy groups (CASMO
energy boundaries [2]) of integrated flux over volume, total reaction rate, and surface
currents. Diffusion coefficients and thus transport cross sections were calculated using
the following leakage balance formula:
g
g
Jright − Jle f t = D g B2 φ g W,
g
(4.16)
g
where Jright and Jle f t are the known group surface currents, D g is the unknown group
diffusion coefficient, B2 is the buckling, and φ g W is the integrated group flux over
volume. Once diffusion coefficients and transport cross sections are calculated in each
group, they can be divided by total cross section to produce the transport-to-total
in-scatter correction curve.
Plots of flux and current spectra, as well as spatial flux distributions in all 70 groups,
are shown in fig. 4.11 and fig. 4.12, respectively. The flux spectrum and current spectrum are reversed in energy. Because neutrons have a higher mean free path at higher
energies, the current is very large. On the other hand, because hydrogen is a very good
moderator, a large thermal peak is present in the flux. Finally, in fig. 4.13 the transportto-total cross section ratio covers the entire energy range. The simplified model, dis-
85
Normalized Spectrum [per lethargy]
0.1
Flux
Current
0.09
0.08
0.07
0.06
0.05
0.04
0.03
0.02
0.01
0
1e-09 1e-08 1e-07 1e-06 1e-05 0.0001 0.001
0.01
0.1
1
10
Energy [MeV]
Figure 4.11. Comparison of flux and current spectra tallied from 1-D hydrogen slab simulation.
0.035
Normalized Flux [-]
0.03
0.025
0.02
0.015
0.01
0.005
0
-50
-40
-30
-20
-10
0
10
20
30
40
50
Slab Position [cm]
Figure 4.12. Comparison of 70 group normalized spatial flux distributions over inner tally
region of a hydrogen slab.
86
1.1
Out-scatter Approx
Σtr(E)/Σt(E)
1
20b cross section - point source 4 MeV
0.9
H-1 cross section - point source 4 MeV
0.8
H-1 cross section - χ source
OpenMC
0.7
0.6
0.5
0.4
0.3
0.2
10-8
10-6
10-4
10-2
100
102
Energy [MeV]
Figure 4.13. Transport-to-total ratio generated from Monte Carlo.
cussed in section 4.7.1, does a good job in the fast energy range with predicting how
this ratio behaves. There are slight differences, but the overall trend is consistent. In
the thermal range, the curve is now complete and increases toward unity. There is also
some statistical noise present in a few of the narrow energy groups. With this complete curve, the total cross section of hydrogen in any simulation can be multiplied
by this ratio to yield an approximated transport cross section that takes into account
in-scatter correction.
4.7.1.2
Hydrogen In-scatter Correction Curve using P1 Theory
The hydrogen in-scatter correction ratio was also generated by treating the in-scattering
exactly in a H-1 slab using P1 theory. To derive this set of equations, we begin with
the P1 equations listed in eq. (4.2) and eq. (4.3). Because we are working in a uniform
medium of hydrogen in slab geometry, we factorize the flux into energy and space
components as follows [36]:
φ (z, E) = φ ( E) exp(±iBz); J (z, E) = J ( E) exp(±iBz).
87
(4.17)
Note that only z appears in the spatial component because we are using 1-D geometry.
This can be substituted into eq. (4.2) and eq. (4.3) to give
±iBJ ( E) + Σt ( E) φ ( E) =
+
Z ∞
0
Σs,0 E0 → E φ E0 dE0
Z
χ (~r, E) ∞
±iBφ ( E) + 3Σt ( E) J ( E) = 3
ke f f
Z ∞
0
0
(4.18)
νΣ f E0 φ E0 dE0
Σs,1 E0 → E J E0 dE0 .
(4.19)
These equations were then integrated over energy to arrive at a multigroup form
represented as
±iBJ g + Σt φ g = ∑ Σs,0 φh + Fg
h→ g
g
(4.20)
h
±iBφ g + 3Σt J g = 3 ∑ Σs,1 J h .
h→ g
g
(4.21)
h
Using these two equations, we can fix the fission source with Watt fission spectrum in
energy, represented as Fg , and solve the equations for current and flux. The other unknowns in this system of equations are cross sections and buckling. For cross sections,
a 70-group library for H-1 bound to water was generated using the code NJOY [1].
This code produced a 70 group P0 and P1 scattering matrix with thermal scattering
information for water. For buckling, it was assumed to be very small at a value of
0.0001 and independent of energy group. To solve these equations, the current was
first assumed such that the multigroup flux could be obtained with eq. (4.20). This
new flux estimate was then used in eq. (4.21) to get a multigroup current. The process
was then repeated until a converged flux and current spectrum resulted. These spectra
were then used in eq. (4.5) to calculate exact multigroup diffusion coefficients. Diffusion coefficients were converted to transport cross sections and divided by total cross
sections to obtain the P1 curve presented in fig. 4.14. This curve lines up nicely on top
of the MC results from OpenMC. Thus, there are many ways to derive the appropriate
transport cross section adjustment factors to account for hydrogen anisotropic scattering. This process can be easily extended to other isotopes present in scattering media.
Finally, we show a comparison between the P1 transport-to-total ratio curve and
the current spectrum. In fig. 4.15, these two curves are shown again with an additional curve showing the product of these data. From the plot, we observe that the
ratio weighted by the current spectrum yields a distribution very similar to the current spectrum. This curve shows what energy ranges are the most important when
calculating the diffusion coefficient. Here, the fission energy range is most important
to compute correctly when generating fast diffusion coefficients.
88
1.1
Out-scatter Approx
Σtr(E)/Σt(E)
1
20b cross section - point source 4 MeV
0.9
H-1 cross section - point source 4 MeV
0.8
H-1 cross section - χ source
OpenMC
0.7
NJOY - P1 equations
0.6
0.5
0.4
0.3
0.2
10-8
10-6
10-4
10-2
100
102
Energy [MeV]
Figure 4.14. Transport-to-total ratio generated from P1 theory.
Current spectrum
Transport/Total ratio
Ratio weighted by current
10-8
10-6
10-4
10-2
100
102
Energy [MeV]
Figure 4.15. Comparison of transport-to-total ratio with current spectrum.
89
4.7.2 Effect of Diffusion Coefficient on CMFD
In this section, results from three representations of diffusion coefficients are presented. The first is an isotropic diffusion coefficient defined as:
D=
1
.
3Σt
(4.22)
Here, it is assumed that there is no anisotropic scattering such that Σs1 = 0. The next
definition of diffusion coefficient in this study is referred to as transport-collapsed
diffusion coefficient. This diffusion coefficient is calculated by first generating coarse
group transport cross sections and then calculating coarse group diffusion coefficients.
The final diffusion coefficient is one that has both a better energy collapse and a better
representation of hydrogen anisotropic scattering, and is referred to as fine groupcollapsed diffusion coefficients. To compute these diffusion coefficients, the following
steps are taken:
1. Compute a fine energy group total and transport cross section for hydrogen
from MC edits for each lattice region,
2. Compute a fine energy group transport cross section for all isotopes from MC
edits for each lattice region,
3. Remove the hydrogen component from the transport cross section of all isotopes,
4. Multiply the hydrogen total cross section by the correction curve in fig. 4.13 to
get an updated transport cross section for hydrogen,
5. Add the corrected hydrogen transport cross section with the transport cross
section for all other isotopes.
Shannon entropy and CMFD eigenvalue results for the 2-D BEAVRS model are presented in fig. 4.16. The isotropic diffusion coefficient is very poor because of the huge
initial depression in the Shannon entropy when CMFD is turned on. This indicates a
really poor estimate of the CMFD fission source. Additionally, tally resetting is very
sensitive as observed at batch 10 of the Shannon entropy plot. It has a much higher depression than the other diffusion coefficients. Compared with the transport-collapsed
diffusion coefficient that we have been presenting thus far, the fine group-collapsed
diffusion coefficient is a little better and is similar to the results observed with higher
numbers of energy groups presented in fig. 4.9. It does not have a large depression
initially, indicating that the first estimate of CMFD fission source is very close to the
true fission source. In addition, it is not as sensitive to tally resetting. The CMFD eigenvalue plot shown in fig. 4.16 does not provide any further conclusions, except that the
90
7.59
Shannon entropy
7.585
7.58
7.575
Isotropic Diffusion Coefficients
Transport-weighted Diffusion Coefficients
Fine group-weighted Diffusion Coefficients
Converged entropy
7.57
7.565
0
10
20
30
40
50
Batch
(a) Shannon entropy fission source convergence
1.0055
CMFD Eigenvalue
1.005
1.0045
1.004
1.0035
Isotropic Diffusion Coefficients
Transport-weighted Diffusion Coefficients
Fine group-weighted Diffusion Coefficients
Converged mean k-effective +1 std. dev.
Converged mean k-effective
Converged mean k-effective -1 std. dev.
1.003
1.0025
0
10
20
30
40
50
CMFD Iteration
(b) CMFD eigenvalue convergence
Figure 4.16. CMFD acceleration with different diffusion coefficient definitions on the 2-D
BEAVRS model.
91
R
P
N
M
L
K
J
H
G
F
E
D
C
B
1
0.60 0.61 0.60 0.61 0.60 0.61 0.60
2
0.60 0.60 0.61 0.59 0.61 0.59 0.61 0.59 0.61 0.60 0.60
3
0.60 0.61 0.61 0.59 0.61 0.59 0.61 0.59 0.61 0.59 0.61 0.61 0.60
A
4
0.60 0.61 0.60 0.61 0.59 0.61 0.59 0.61 0.59 0.61 0.60 0.61 0.60
5
0.60 0.61 0.59 0.61 0.59 0.61 0.59 0.61 0.59 0.61 0.59 0.61 0.59 0.61 0.60
6
0.61 0.59 0.61 0.59 0.61 0.59 0.61 0.59 0.61 0.59 0.61 0.59 0.61 0.59 0.61
7
0.60 0.61 0.59 0.61 0.59 0.61 0.59 0.61 0.59 0.61 0.59 0.61 0.59 0.61 0.60
8
0.61 0.59 0.61 0.59 0.61 0.59 0.61 0.59 0.61 0.59 0.61 0.59 0.61 0.59 0.61
9
0.60 0.61 0.59 0.61 0.59 0.61 0.59 0.61 0.59 0.61 0.59 0.61 0.59 0.61 0.60
10
0.61 0.59 0.61 0.59 0.61 0.59 0.61 0.59 0.61 0.59 0.61 0.59 0.61 0.59 0.61
11
0.60 0.61 0.59 0.61 0.59 0.61 0.59 0.61 0.59 0.61 0.59 0.61 0.59 0.61 0.60
12
0.60 0.61 0.60 0.61 0.59 0.61 0.59 0.61 0.59 0.61 0.60 0.61 0.60
13
0.60 0.61 0.61 0.59 0.61 0.59 0.61 0.59 0.61 0.59 0.61 0.61 0.60
14
0.60 0.60 0.61 0.59 0.61 0.59 0.61 0.59 0.61 0.60 0.60
15
0.60 0.61 0.60 0.61 0.60 0.61 0.60
Figure 4.17. Map of fast diffusion coefficients assuming isotropic scattering.
first eigenvalue using isotropic diffusion coefficients over-predicts the true eigenvalue
by a large margin.
Spatial distributions of fast diffusion coefficients over the core are shown in fig. 4.17
for isotropic diffusion coefficients, fig. 4.18 for transport-collapsed diffusion coefficients and fig. 4.19 for fine group-collapsed diffusion coefficients. The isotropic fast diffusion coefficients are too small and the spatial distribution is different than the other
two representations of diffusion coefficients. This isotropic assumption is, of course,
invalid because the main scatterer in the moderator is hydrogen, a large anisotropic
scattering component. The spatial distributions presented in fig. 4.18 and fig. 4.19 are
very similar. The 3.1% bundles on the outer ring of the core have very high diffusion coefficients because neutron leakage is larger in these locations. We also observe
a checkerboard in the center that follows the enrichment and Burnable Poison (BP)
distribution closely. The magnitudes are quite different where the transport-collapsed
diffusion coefficients under-predict the fine group-collapsed diffusion coefficients. The
magnitudes of fast diffusion coefficients shown in fig. 4.19 are on the right order for
thermal reactors. Although the magnitude of these diffusion coefficients are more inline with expectations, they do not show a large advantage when considering CMFD
acceleration. Therefore, for the BEAVRS reactors, either one of these two definitions
is acceptable. The isotropic definition is not recommended because it is very sensitive
to a perturbation such as tally resetting. However, when generating diffusion coeffi-
92
R
P
N
M
L
K
J
H
G
F
E
D
C
B
1
1.11 1.11 1.11 1.11 1.11 1.11 1.11
2
1.11 1.11 1.11 1.10 1.11 1.10 1.11 1.10 1.11 1.11 1.11
3
1.11 1.11 1.10 1.10 1.10 1.10 1.10 1.10 1.10 1.10 1.10 1.11 1.11
A
4
1.11 1.10 1.11 1.10 1.10 1.11 1.10 1.11 1.10 1.10 1.11 1.10 1.11
5
1.11 1.11 1.10 1.10 1.10 1.11 1.10 1.11 1.10 1.11 1.10 1.10 1.10 1.11 1.11
6
1.11 1.10 1.10 1.10 1.11 1.10 1.11 1.10 1.11 1.10 1.11 1.10 1.10 1.10 1.11
7
1.11 1.11 1.10 1.11 1.10 1.11 1.10 1.10 1.10 1.11 1.10 1.11 1.10 1.11 1.11
8
1.11 1.10 1.10 1.10 1.11 1.10 1.10 1.10 1.10 1.10 1.11 1.10 1.10 1.10 1.11
9
1.11 1.11 1.10 1.11 1.10 1.11 1.10 1.10 1.10 1.11 1.10 1.11 1.10 1.11 1.11
10
1.11 1.10 1.10 1.10 1.11 1.10 1.11 1.10 1.11 1.10 1.11 1.10 1.10 1.10 1.11
11
1.11 1.11 1.10 1.10 1.10 1.11 1.10 1.11 1.10 1.11 1.10 1.10 1.10 1.11 1.11
12
1.11 1.10 1.11 1.10 1.10 1.11 1.10 1.11 1.10 1.10 1.11 1.10 1.11
13
1.11 1.11 1.10 1.10 1.10 1.10 1.10 1.10 1.10 1.10 1.10 1.11 1.11
14
1.11 1.11 1.11 1.10 1.11 1.10 1.11 1.10 1.11 1.11 1.11
15
1.11 1.11 1.11 1.11 1.11 1.11 1.11
Figure 4.18. Map of fast diffusion coefficients calculated from fast transport cross section.
R
P
N
M
L
K
J
H
G
F
E
D
C
B
1
1.44 1.44 1.44 1.44 1.44 1.44 1.44
2
1.44 1.44 1.44 1.42 1.43 1.42 1.43 1.42 1.44 1.44 1.44
3
1.44 1.43 1.43 1.42 1.43 1.42 1.43 1.42 1.43 1.42 1.43 1.43 1.44
A
4
1.44 1.43 1.43 1.43 1.42 1.43 1.42 1.43 1.42 1.43 1.43 1.43 1.44
5
1.44 1.44 1.42 1.43 1.42 1.43 1.42 1.43 1.42 1.43 1.42 1.43 1.42 1.44 1.44
6
1.44 1.42 1.43 1.42 1.43 1.42 1.43 1.42 1.43 1.42 1.43 1.42 1.43 1.42 1.44
7
1.44 1.43 1.42 1.43 1.42 1.43 1.42 1.43 1.42 1.43 1.42 1.43 1.42 1.43 1.44
8
1.44 1.42 1.43 1.42 1.43 1.42 1.43 1.42 1.43 1.42 1.43 1.42 1.43 1.42 1.44
9
1.44 1.43 1.42 1.43 1.42 1.43 1.42 1.43 1.42 1.43 1.42 1.43 1.42 1.43 1.44
10
1.44 1.42 1.43 1.42 1.43 1.42 1.43 1.42 1.43 1.42 1.43 1.42 1.43 1.42 1.44
11
1.44 1.44 1.42 1.43 1.42 1.43 1.42 1.43 1.42 1.43 1.42 1.43 1.42 1.44 1.44
12
1.44 1.43 1.43 1.43 1.42 1.43 1.42 1.43 1.42 1.43 1.43 1.43 1.44
13
1.44 1.43 1.43 1.42 1.43 1.42 1.43 1.42 1.43 1.42 1.43 1.43 1.44
14
1.44 1.44 1.44 1.42 1.43 1.42 1.43 1.42 1.44 1.44 1.44
15
1.44 1.44 1.44 1.44 1.44 1.44 1.44
Figure 4.19. Map of fast diffusion coefficients collapsed from a fine distribution of diffusion
coefficients.
93
cients on a lattice for core analysis with diffusion theory, the fine-group diffusion with
in-scatter correction is by far the most accurate.
4.8
3-d cmfd acceleration of beavrs
A study of CMFD acceleration was performed for the 3-D BEAVRS model. In this
study, a 3-D mesh using assembly size cells radially and 24 uniform cells over the
active core axially were used for CMFD acceleration. In the simulation, coarse group
transport cross sections were used to compute coarse group diffusion coefficients. Tallies were reset at batch 10 and 50 million neutrons were simulated per FSG. It should
be noted that albedo boundary conditions for CMFD were present on the bottom and
top of the active fuel region. These are calculated from partial current tallies over these
surfaces during the MC simulation. Results of this simulation are shown in fig. 4.20.
CMFD acceleration of the BEAVRS 3-D model was very effective. It took about 200
batches to converge the fission source without CMFD, but only 20 batches with CMFD.
A study was performed to determine how CMFD acceleration would behave with
fewer particles simulated per FSG. Results are presented in fig. 4.21 for 1, 4, 10, 20
and 50 million neutrons per FSG. Similar to the Shannon entropy convergence results
without CMFD shown in fig. 2.6, 1 million neutrons is too few for 3-D BEAVRS. Here,
this case is unstable and the code fails. By increasing the number of neutrons to 4
million per FSG, convergence to the expected entropy is observed. As the number of
12.58
No CMFD
With CMFD
Converged entropy
12.56
12.54
Shannon entropy
12.52
12.5
12.48
12.46
12.44
12.42
12.4
12.38
12.36
0
50
100
150
200
Batch
Figure 4.20. CMFD acceleration of 3-D BEAVRS core.
94
250
12.6
1 million
4 million
10 million
20 million
50 million
Converged entropy
Shannon Entropy
12.55
12.5
12.45
12.4
12.35
12.3
0
10
20
30
40
50
Batch
Figure 4.21. Comparison of CMFD acceleration for different numbers of neutrons per FSG on
the 3-D BEAVRS model.
neutrons is increased even further, no extra benefit is seen in terms of CMFD acceleration. Except for 1 million, all cases converge by batch 20.
4.9
tally correlation with cmfd feedback
All results presented in this chapter have focused on the benefit CMFD acceleration
provides when activated during fission source convergence. Once a fission source is
converged, the question remains if it should be left active during tally batches. From
tally convergence studies presented in section 2.5, we observed that tally batches are
highly correlated due to fission source updating. Because CMFD is also solved between batches and modifies the fission source, it could potentially reduce this correlation. The procedure for this study is to run the exact same simulations as before with
2, 10, 20 million neutrons per FSG, but with CMFD now active between batches. ACC
results are presented in fig. 4.22 and RMS error in fig. 4.23. The ACCs calculated are
indeed smaller than those results presented without CMFD in fig. 2.12. With CMFD
active, the highest value taking into account 1 sample standard deviation is 0.5, instead of 0.7 without CMFD. This confirms the expectation that CMFD does decouple
tally batches even if it is by a small amount. CMFD acceleration can’t remove correlation completely because diffusion parameters are still generated from tallies that are
correlated. Another difference between the results is that higher ACCs are observed
at larger lags. We do not observe the same exponential drop as with the no CMFD
case. The RMS convergence results shown in fig. 4.23 are slightly different from the
95
0.5
2 million
10 million
20 million
Sample Autocorrelation
0.4
0.3
0.2
0.1
0
-0.1
10
20
30
40
50
60
70
80
90
100
Lag
Figure 4.22. Autocorrelation coefficients with CMFD present during tally batches on the 2-D
BEAVRS model.
results shown without CMFD in fig. 2.13. The RMS errors are actually slightly larger
with CMFD active and the spread of data from separate simulations is also slightly
larger. This specific application of using CMFD during tally batches yields no benefit
and thus, CMFD can be turned off during tally batches.
4.10
higher harmonics and adjoint with cmfd
There are other applications besides CMFD acceleration that can be useful in reactor
analysis now that we have a system of diffusion equations that are consistent with
MC physics. In this section, we present results where the CMFD system of equations
yields information about higher harmonic and adjoint distributions, as well as on-thefly estimation of dominance ratio. Recently, higher harmonics have been generated
from MC solutions using fission matrix methods, but not with MC-CMFD methods
[37]. Fission matrix methods require storing a large matrix that includes coupling
between every mesh cell. In CMFD, cells are only coupled to their nearest neighbors
through neutron leakage and thus matrices are very sparse.
All simulations were performed on the 2-D BEAVRS model with 4 million neutrons per FSG, 200 FSGs and 300 tally batches. To obtain higher harmonics, different
eigenvalue solution methods are required. For this demonstration, CMFD matrices
were edited out of OpenMC and loaded into Matlab [38]. Matlab has many solvers
including a generic eigenvalue solver called eigs. With this solver, the first 20 eigenvalues and eigenvectors were calculated. Results for fast flux harmonics are shown in
96
RMS [%]
1
0.1
106
2 million
10 million
20 million
107
108
109
Number of Histories
Figure 4.23. RMS convergence of fission source with CMFD present during tally batches on
the 2-D BEAVRS model.
fig. 4.24 and thermal flux harmonics are presented in fig. 4.25. The upper left subplot
shows the fundamental mode distribution. As one moves to the right, and then down
to the next line, successive modes are presented.
The next application is to generate fast and thermal adjoint flux distributions. Adjoint distributions are a very important component in perturbation theory and calculation of adjoint-weighted kinetics parameters [39]. An adjoint distribution can be
obtained by taking the mathematical adjoint of the eigenvalue problem shown in
eq. (3.15),
M† Φ † =
1 † †
F Φ .
k
(4.23)
In eq. (4.23), Φ† is the multigroup adjoint flux vector and M† and F† are mathematical adjoints of the loss and production matrices, respectively. By mathematical adjoint,
we mean taking the transpose of CMFD matrices. Once the operators have been transposed, the same type of eigenvalue solution used with general CMFD is performed.
Results for forward fast and thermal flux are presented in fig. 4.26 and can be compared to their adjoint distributions shown in fig. 4.27. The adjoint distributions show
the importance of spatial locations to the fission reaction. Naturally, because more
fast neutrons are born in locations that contain a lot of fissile material and these locations are also more important to the fission reaction, fast forward flux and fast adjoint
flux look very similar. The thermal forward flux shows larger values in bundles that
contain less fissile material such as the 1.6% enriched bundles in the BEAVRS case.
97
Figure 4.24. Fast flux harmonics from 2-D BEAVRS.
98
Figure 4.25. Thermal flux harmonics from 2-D BEAVRS.
99
'phi0g1.dat' matrix
'phi0g2.dat' matrix
(a) Fast Forward Flux
(b) Thermal Forward Flux
Figure 4.26. Fast and thermal forward flux distributions of BEAVRS 2-D core.
'aphig1.dat' matrix
'aphig2.dat' matrix
(a) Fast Adjoint Flux
(b) Thermal Adjoint Flux
Figure 4.27. Fast and thermal adjoint flux distributions of BEAVRS 2-D core.
However, these bundles are not the most important to fission. The thermal adjoint
distribution highlights locations that are most important.
Lastly, an on-the-fly dominance ratio estimator was added to OpenMC using the
CMFD solver. Instead of using Matlab to solve for higher harmonic distribution, we
can take advantage of analyzing the asymptotic convergence rate of power iteration.
This convergence rate is governed by the dominance ratio [40]. By taking the ratio
of successive norms of source error, an estimate of dominance ratio can be obtained.
Figure 4.28 shows a plot of RMS source error as a function of power iteration. The
ratio of successive points on this curve is an estimate of dominance ratio. A plot of
dominance ratio as a function of MC batch is shown in fig. 4.29. In this plot, we see
the dominance ratio converges to a value of about 0.9947 for 2-D BEAVRS. At batch
100
RMS difference of successive sources
10-1
10-2
10-3
10-4
10-5
10-6
10-7
10-8
10-9
0
200
400
600
800
1000
1200
1400
1600
Power iteration
Figure 4.28. Source error reduction during power iterations.
0.9964
0.9962
Dominance Ratio
0.996
0.9958
0.9956
0.9954
0.9952
0.995
0.9948
0.9946
0.9944
0
50
100
150
200
250
300
350
400
450
500
Batch
Figure 4.29. Convergence of dominance ratio using CMFD for the 2-D BEAVRS model.
101
200, tally bins are reset to zero so there is some disturbance in the dominance ratio.
This method has not been compared to other dominance ratio methods such as the
coarse method projection method [41].
Highlights
• If possible, start with an initial fission source guess only in fuel pins. Uniform source, which included non-fissionable regions, led to highly peaked
initial CMFD source distribution. Reset CMFD tallies after first batch.
• Tracklength tallies are a better estimator for CMFD diffusion parameters.
• Tally resetting is needed to remove initial source guess bias from CMFD diffusion parameters. Both point and moving window resets were discussed.
• In two energy groups, effective down-scatter cross section yielded a less
biased result for the same tally resetting procedure. This is because the
up-scatter cross section, which gets tallied less frequently, was removed.
• Assembly size mesh and two energy groups are adequate for CMFD acceleration. Smaller meshes and more energy groups did not yield better
acceleration results.
• Few group diffusion coefficients collapsed from fine group diffusion coefficients that were also corrected for hydrogen anisotropic scattering yielded
the best acceleration.
• Although correlation between tally batches was reduced when applying
CMFD, RMS error convergence did not show any improvement.
• CMFD can be used to estimate dominance ratio, higher eigenmodes and
adjoint distributions.
102
5
THERMAL HYDRAULIC FEEDBACK
5.1
thermal hydraulic equations
This chapter focuses on coupling TH equations with MC based neutronics. We begin
by introducing the TH model used in this analysis. Because our main goal is to analyze
the impact of coupling on MC convergence and the interaction with CMFD, only a
simplified TH model is used. The following assumptions are made in the TH model
for calculating fuel temperature and coolant density distributions:
1. Single-phase fully developed flow,
2. Infinite mixing of coolant in an assembly and no cross flow between assemblies,
3. Known flow rate into each assembly and pressure fixed in each channel,
4. Fission energy deposition is local to volume and approximated by fission neutron production rate,
5. Assembly-averaged quantities are calculated.
For 3-D models, the assembly is discretized axially over the assembly. An average
coolant density and fuel temperature is calculated for each of these cells. The assumptions in the TH formulation leads to a model that is only dependent on the energy conservation equation. A simple diagram is shown in fig. 5.1 illustrating how a coolant
channel is discretized axially. The inlet enthalpy shown at i − 1/2 is known, as well
as the mass flow rate of coolant in the channel. Knowing these two quantities, the
enthalpy at the top of the first cell at location i + 1/2 can be calculated using
hi+1/2 = hi−1/2 +
q̇i
,
ṁ
(5.1)
where h is the enthalpy, q̇i is the power in cell i and ṁ is the mass flow rate. A sweep
from bottom to top is performed to determine all enthalpies at the top and bottom
of each cell. The last unknown in eq. (5.1) is the power which is supplied from MC
tallies. It should be noted that MC provides cell relative power peaking factors. The
power of the whole reactor must be known in order to compute the power in each cell.
To determine the average enthalpy in each cell, a simple average is taken between the
enthalpy on the top surface and the enthalpy on the bottom surface. Once the average
103
i + 11/2
i+5
i + 9/2
i+4
i + 7/2
i+3
i + 5/2
i+2
i + 3/2
i+1
i + 1/2
i
i − 1/2
Figure 5.1. Diagram of TH axial discretization.
enthalpy in each cell is known, it is used along with pressure to look up coolant
density and temperature using the equation of state for water* .
Besides coolant density, we also want to approximate the average fuel temperature
in each assembly. In this model, we ignore axial heat transfer and use a radial conduction model to calculate average fuel temperature with the following formula [43]:
T f = Tm +
1
1
1
Rco
1
q0
+
+ ln
+
,
2π 4k f
Rg hg
kc
Rci
Rco hm
(5.2)
where
• T f is the average fuel temperature,
• Tm is the temperature of water in the cell determined from the equation of state,
• q0 is the linear heat generation rate,
• k f is the average fuel conductivity,
• R g is the mean gap radius calculated by taking the average of clad inner radius
and fuel pellet radius,
• h g is the gap conductivity,
• k c is the conductivity of clad,
• Rco and Rci are the outer and inner clad radii, respectively,
• and hm is the coolant heat transfer coefficient.
* In
this work, we use the international-standard IAPWS-IF97 steam tables [42].
104
Table 5.1. Material properties and operating conditions used in TH model.
Parameter
Value
Conductivity of fuel, k f [W/m-K]
2.4a
Conductivity of clad, k c [W/m-K]
17a
Gap conductance, h g [W/m2 -K]
31000a
Inlet specific enthalpy, hin [J/kg]
1301740.0b
Core flow rate [kg/s]
17083.3b
Core power [MW]
3411b
a Taken
from [43].
b Taken
from [8].
There are assembly-specific material properties used in eq. (5.2). For example, fuel
conductivity is a function of the average fuel temperature. For simplicity, we assume
constant values for these properties in every assembly. They are listed, along with
other operating parameters, in table 5.1. The coolant heat transfer coefficient is determined by calculating the Nusselt number from the Dittus-Boelter correlation [43].
The procedure for the TH calculation is to first compute cell relative power peaking
factors and then sweep from core inlet to core outlet and compute enthalpy at each
cell axial edge using eq. (5.1). Once this distribution is calculated, average enthalpies
are determined for each cell volume. These enthalpies are used to compute density
and temperature of the coolant in each cell. Once this temperature is known, eq. (5.2)
is used to calculate average fuel temperature. Coolant density and fuel temperature
are then used for feedback described in the next section. It should be noted that the
methodologies for thermal hydraulics described in this chapter will work with more
sophisticated models.
5.2
neutronic and thermal feedback
In this section, we discuss how neutron information is passed to TH equations and
how the results from the TH analysis are fed back to CMFD and MC. We start a
coupled simulation by choosing the initial fission source and cell-averaged thermal
hydraulic distributions of coolant density and fuel temperature. During an MC simulation, power distribution is tallied which yields cell relative power peaking factors.
105
This is the only information that is required by the TH model described in the previous
section.
The more complicated step is feeding back information to CMFD and MC. First,
we discuss how to feed back coolant density and fuel temperature information to
MC. For coolant density, we adjust the atom densities of nuclides in materials when
macroscopic cross sections are calculated. This is performed in OpenMC every time a
neutron is first born, hits a material boundary and after each interaction. This avoids
the need to replicate coolant material definitions in the input file. For fuel temperature, we use the windowed multipole method for on-the-fly Doppler broadening of
resolved resonances in Uranium-235 and Uranium-238 [44, 45]. More resonance absorbers will be included as they become available with this approach. This method is
further discussed in section 5.3.
An alternative method to direct coupling with MC, is to couple updated TH distributions with the low-order CMFD operator. By performing these low-order iterations,
information about new TH conditions can have an instant effect on the neutronics governed by the CMFD operator. Whereas when coupling to MC, many particles need to
be simulated to observe this effect. These low-order feedback iterations are similar to
those currently performed in reactor analysis methods. In analysis codes similar to
SIMULATE, TH feedback is performed using the CMFD operator. Feedback to CMFD
is somewhat straightforward in nodal codes because there is an interpolation library
that determines the appropriate macroscopic cross sections for the current TH conditions in the simulation. All time-consuming work is performed during lattice calculations to build this library. As stated in section 1.1, the goal of future reactor analysis
methods is to remove the lattice calculation stage and make methods reactor agnostic.
This means that we will not have a pre-generated dependence of cross sections on TH
conditions. In order to solve this issue, a machine learning algorithm, Support Vector Regression (SVR), is used to determine this dependence on-the-fly during the MC
simulation. This process is discussed in more detail in section 5.4. At this point, this
process can be thought of as a procedure that builds a continuous representation of a
cross section library and predicts new cross sections based on TH conditions.
5.2.1 Coupling Methods
There are many methods to perform TH feedback in the context of NDA-MC simulations. In this work, we study three types of coupling strategies. The first method
is depicted in fig. 5.2 and will be denoted as coupling method (a). This represents
the conventional style of MC-TH coupling as used in Bernnat et al. [46]. In the conventional coupling method, a full MC solution is obtained by first running inactive
FSGs to converge the fission source and then a power distribution is tallied during
106
Converge
MC source
Update MC
Data: ρc andT f
Tally Power
Distribution
Run TH
equations
Figure 5.2. Coupling method (a) - conventional MC-TH coupling.
active batches. This tally is then used in TH equations and results are fed back to
MC. Another full MC solution is then performed and the process repeats until TH
distributions are converged. This can be a very slow and computationally expensive
procedure. Some savings can be realized by not converging source or tallies in early
iterations and increasing the amount of neutrons simulated to get tighter convergence
in later iterations. In our version of this conventional methodology, the user selects
how many neutrons to simulate per FSG and how many active batches to use when
accumulating a power distribution tally.
Lee realized that there is a potential for neutrons to be wasted in a scheme like
method (a) [10]. He focused on performing TH feedback during inactive fission source
generations to obtain a converged source that is consistent with a TH distribution. This
is shown in fig. 5.3 and is denoted as coupling method (b). This method is very similar
to (a), except we tally a power distribution during inactive fission source generations.
In method (b), only one MC simulation is performed to obtain a converged fission
source distribution with TH feedback. There are a lot of important simulation parameters in this type of simulation. First, the user selects how many neutrons to simulate
per FSG and when to begin TH feedback. In addition, the user must determine the
TH feedback interval. Because we are changing coolant densities and fuel temperatures, tallies must be reset to avoid unnecessary bias. Users can select the point batch
resetting scheme or a moving window scheme as discussed in section 4.3.2 and section 4.3.3, respectively. In Lee’s method, TH feedback begins after the first FSG and
is applied after every FSG. Tallies are reset after each TH feedback iteration. Lee then
applied CMFD acceleration to this procedure to study if faster convergence was possible. Coupling method (b) differs from Lee’s method in that we use continuous-energy
MC which requires more particles and have applied a moving window to remove any
bias.
In this thesis, we propose an additional method for performing TH feedback. The
major difference between coupling method (b) and this new method is that we use
CMFD to predict the power distribution instead of MC. This means that we can
perform iterations between CMFD and TH before going back to MC. This proposed
methodology is presented in fig. 5.4 and is denoted as coupling method (c). For a given
107
Batch i
Batch i + 1
Extract
Power Tally
Update OpenMC
Data: ρc andT f
T/H Update
Figure 5.3. Coupling method (b) - MC-TH coupling applied during fission source iterations.
Batch i
Batch i + 1
Train SVR with XS
Update OpenMC
Data: ρc , T f and
source weights
CMFD
Predict XS
with SVR
no
T/H Update
Done?
yes
Figure 5.4. Coupling method (c) - new coupling method where low-order CMFD-TH iterations
are converged between MC fission source iterations.
batch where TH feedback is performed, tallies are accumulated over some range of
batches depending on the tally resetting procedure. Before running CMFD and TH
equations, training is performed with SVR based on tallies from MC. Note, training here is analogous to having a cross section interpolation library. CMFD and TH
equations are then solved. If requested, inner iterations can be performed where new
diffusion parameters are predicted using SVR, and the process repeats. Thus, a fully
consistent CMFD/TH solution can be achieved before feeding back TH information
and CMFD source to MC.
108
5.3
multipole temperature feedback
One of the most challenging aspects of using MC in this coupled framework is temperature dependence of microscopic cross sections. Unfortunately, the brute force
method of storing these cross sections at numerous temperatures for every isotope
is intractable. This was studied by Trumbull where he concluded that data storage of
tens to hundreds of gigabytes would be necessary [47]. Over the past decade, research
has been performed to study on-the-fly Doppler broadening that allows temperature
dependent physics in the resolved energy range [48, 49]. These methods reduce the
storage size needed to gigabytes.
Recently, Forget et al. studied temperature dependence in the resolved energy range
using the multipole representation method. This is a completely different way of representing resonances of cross sections with poles. It has been estimated to further
reduce storage size to hundreds of megabytes [44]. Forget implemented this method
in OpenMC to test on resolved resonances of Uranium-235 and Uranium-238. Resulting cross sections produced from NJOY at a given temperature were compared with
these new on-the-fly Doppler broadened cross sections and yielded good agreement.
A 10% increase in computational cost was initially observed.
In this thesis, we use this module in OpenMC to perform temperature feedback to
Uranium-235 and Uranium-238 in the resolved energy range. This will be sufficient to
obtain reactivity effects from different fuel temperatures. The multipole method is an
active research topic. Recent work has focused on optimizing the windowed multipole
method that would eliminate some of the computational cost [45]. Future work in the
area of on-the-fly Doppler broadening would extend to other energy ranges such as
thermal neutron physics, unresolved energy range and high energy range.
Besides simple testing and comparison studies, this thesis is the first application
of the multipole method for temperature feedback. Thus, testing is required. Four
OpenMC simulations on the BEAVRS 2-D model were performed:
1. conventional MC with ACE libraries at 900 K,
2. multipole MC at 900 K with ACE libraries for non-Uranium isotopes and physics
outside of the resolved energy range at 900 K,
3. multipole MC at 900 K with ACE libraries for non-Uranium isotopes and physics
outside of the resolved energy range at 600 K, and
4. multipole MC at 600 K with ACE libraries for non-Uranium isotopes and physics
outside of the resolved energy range at 600 K.
We still need to use ACE libraries at a reasonable temperature because there are still
temperature effects in other isotopes besides Uranium and in other energy ranges. All
109
R
P
N
M
L
K
J
H
G
F
E
D
C
B
1
-0.15 -0.22 -0.47 -0.59 -0.61 -0.51 -0.48
2
-0.83 -0.46 -0.32 -0.24 -0.34 -0.36 -0.38 -0.39 -0.18 0.01 0.17
3
-0.74 -0.74 -0.71 -0.51 -0.38 -0.19 -0.23 -0.16 -0.01 0.07 0.06 0.09 -0.01
A
4
-0.67 -0.72 -0.71 -0.44 -0.12 -0.05 -0.02 -0.13 -0.03 0.12 0.17 0.26 0.14
5
-0.59 -0.75 -0.77 -0.67 -0.33 -0.05 0.08 0.07 -0.02 0.08 0.27 0.15 0.18 0.23 0.07
6
-0.17 -0.24 -0.48 -0.51 -0.31 -0.05 0.04 0.14 0.03 -0.05 0.13 0.17 0.17 0.11 0.14
7
-0.02 -0.07 -0.23 -0.25 -0.17 -0.03 0.10 0.07 0.06 0.06 0.21 0.23 0.19 0.10 -0.03
8
-0.04 -0.07 -0.16 -0.15 -0.02 0.05 0.03 0.02 0.08 -0.04 -0.05 0.17 0.14 -0.01 -0.08
9
0.26 0.08 0.14 0.23 0.05 -0.03 -0.14 -0.08 0.02 -0.07 0.14 0.26 0.18 0.12 -0.11
10
0.40 0.42 0.25 0.37 0.16 0.04 0.11 -0.10 -0.13 -0.16 -0.00 -0.01 0.21 0.06 -0.15
11
0.45 0.61 0.50 0.37 0.32 0.31 0.30 0.08 -0.01 -0.01 -0.02 -0.09 0.06 0.07 -0.12
12
0.71 0.55 0.49 0.38 0.34 0.26 0.20 0.09 -0.04 -0.07 -0.07 -0.01 -0.08
13
0.62 0.49 0.57 0.39 0.19 0.32 0.23 0.13 -0.02 -0.00 0.03 0.04 -0.09
14
0.33 0.56 0.53 0.30 0.20 0.13 0.10 -0.01 -0.10 -0.06 0.04
15
0.53 0.38 0.31 0.22 0.10 -0.01 -0.02
Figure 5.5. Relative percent error between conventional ACE cross sections and multipole representation method at 900K.
cases were performed with 20 million neutrons per FSG, one FSG per tally batch, 200
inactive FSGs and 200 tally batches.
Case (2) has ACE libraries and multipole physics at exactly the same temperature.
By comparing results to case (1), we can determine if there is a significant difference
when using the multipole method. The eigenvalues of case (1) and case (2) were different by approximately 10 pcm. Case (1)’s eigenvalue was 0.99646(1) and case (2)
yielded an eigenvalue of 0.99658(1). Although the difference between eigenvalues is
statistically significant, the comparison is still good, especially when taking into account that multipole is a completely different representation of resonances and avoids
the inexact linearization process of the ACE format. In addition to eigenvalue, source
distributions were compared and presented in fig. 5.5. To generate these results, the
difference between case (1) and case (2) is shown as a percentage. The RMS of the
difference was 0.298%. Recalling that the uncertainty in these simulations is about
0.3-0.4%, these differences are not significant.
Next, case (2) was compared to case (3). This is an important comparison to ensure
that the multipole representation of just Uranium isotopes encompasses the majority
of the temperature effects in the system. Thus, the multipole temperature was kept at
900 K, but the ACE library temperature was changed to 600 K. In a feedback simulation, there will always be a difference between the actual temperature of an assembly
110
R
P
N
M
L
K
J
H
G
F
E
D
C
1
0.27 0.35 0.52 0.34 0.17 0.22 0.35
2
0.70 0.79 0.37 0.30 0.17 0.03 -0.06 -0.02 0.35 0.76 1.03
B
A
3
0.37 0.56 0.36 0.14 -0.12 -0.25 -0.13 -0.09 0.05 0.37 0.66 0.89 1.11
4
0.26 0.16 0.05 -0.05 -0.14 -0.32 -0.36 -0.06 0.03 0.37 0.68 0.75 0.96
5
0.40 0.25 0.03 -0.08 -0.10 -0.23 -0.36 -0.31 -0.30 -0.07 0.26 0.49 0.51 0.80 0.88
6
0.34 0.09 -0.02 -0.28 -0.26 -0.37 -0.50 -0.49 -0.36 0.07 0.15 0.42 0.47 0.73 0.97
7
0.47 0.06 -0.02 -0.31 -0.37 -0.50 -0.65 -0.60 -0.35 -0.11 0.16 0.19 0.37 0.51 0.92
8
0.37 0.18 0.07 -0.09 -0.32 -0.59 -0.77 -0.69 -0.38 -0.19 -0.06 0.15 0.37 0.56 0.69
9
0.40 0.26 0.21 -0.05 -0.26 -0.47 -0.88 -0.84 -0.72 -0.35 -0.28 0.07 0.34 0.31 0.43
10
0.26 0.36 0.20 -0.28 -0.34 -0.57 -0.79 -0.85 -0.76 -0.45 -0.25 -0.16 0.02 0.28 0.57
11
0.33 0.28 0.23 -0.31 -0.53 -0.54 -0.69 -0.65 -0.46 -0.38 -0.36 -0.20 -0.02 0.24 0.47
12
0.47 0.22 -0.14 -0.52 -0.54 -0.63 -0.54 -0.48 -0.39 -0.23 -0.17 -0.10 0.13
13
0.47 0.12 -0.05 -0.30 -0.51 -0.64 -0.53 -0.45 -0.30 -0.18 0.03 0.19 0.41
14
0.34 -0.02 -0.19 -0.51 -0.70 -0.52 -0.47 -0.21 0.13 0.11 0.21
15
-0.32 -0.50 -0.53 -0.38 -0.30 0.03 0.16
Figure 5.6. Comparison of fuel temperature effects (relative percent difference) not captured
by multipole method outside of resonance range.
and the ACE library loaded for fuel isotopes. The eigenvalue for case (3) is 0.99697(1)
and is approximately 40 pcm larger than case (2). The difference in source distributions is shown in fig. 5.6 and has an RMS error of 0.289%. This is also within the
uncertainty of the simulations. Lastly, we compare case (3) and (4) which highlights
the effect of Doppler broadening with the multipole method. The eigenvalue results
from case (4) is 1.00392(1). This is approximately 700 pcm larger than the eigenvalue
from case (3). This is also much larger than the eigenvalue difference observed when
comparing case (2) and case (3). In addition, the RMS between source distibutions
was 0.434%. Thus, the multipole method is capturing the majority of the temperature
effects in the system.
5.4
support vector regression
In this section, we provide a high level understanding of SVR. SVR is a type of machine learning algorithm that falls under the class of Support Vector Machines (SVMs)
[50]. Along with regression, this tool is also widely used for classification. In classification, this machine learning tool provides a binary answer such as true/false.
In regression, we are interested in a continuous distribution of answers. SVM is a
type of supervised learning algorithm where training examples are provided before
111
predictions can be made. For an SVR problem, training data are given in the form
{(~x1 , y1 ) , . . . , (~xn , yn )}, where ~x is a feature vector that describes a label y. In the context of thermal hydraulic feedback, a feature vector may include information such as
fuel temperature and coolant density, and a label can be a macroscopic cross section.
The intent is to accurately map feature vectors that are not included in the training
data to the appropriate labels.
The simplest type of regression to perform is linear. This can be represented in
multi-dimensional space as
f (~x ) = h~
w, ~x i + b,
(5.3)
~ is a vector of weights and b is the offset from the origin. The goal of this
where w
method is to minimize the norm of the weight vector. Instead of going through the
rigorous details of how to solve the problem, the optimization problem formulated by
Cortes and Vapnik will just be listed [51]. It is
minimize
1
2
l
+ C ∑ (ξ i + ξ i∗ )
i =1
w, ~x i − b
yi − h~
subject to
w, ~x i + b − yi
h~
ξ i , ξ i∗
≤ e + ξi
≤
e + ξ i∗
(5.4)
.
≥0
In Equation (5.4), ξ i and ξ i∗ are defined as slack variables which help with the constraints of the optimization problem and force the SVM model to generalize and not
over-fit training data. This is important in MC because we want a balance between a
complex model that fits training data and one that over-fits to MC noise. The variable
C is introduced as a regularization parameter which penalizes more complex models
to avoid over-fitting. The parameter e is the main value that can be changed in the
e-insensitive loss function. Figure 5.7 depicts an insensitive band where only points
outside of the shaded ±e region contribute to the loss. More details can be found in
literature and a thorough introduction to this material is discussed in [50].
In most applications, trends in data are nonlinear. SVR has the capability of performing nonlinear regression by mapping feature vectors to higher dimensional feature spaces, represented mathematically as ~x → Φ(~x ), using kernels. In SVR, implicit
mapping to features spaces is only required and the mapping function Φ(~x ) is not explicitly needed. Rather, kernels are used to represent the result of the inner product be
tween two feature vectors, K ~xi , ~x j ≡ hΦ(~xi ), Φ(~xi )i. In the SVR analyses performed
112
+e
−e
Figure 5.7. e-insensitive band in linear SVR [50].
in this thesis, the popular Gaussian radial basis function was used and is formulated
as
2 K ~xi , ~x j = exp −γ ~xi − ~x j ,
(5.5)
where γ is typically taken as the inverse of the number of features.
In TH feedback simulations performed in this work, the following features were
used:
1. enrichment of cell,
2. number of Burnable Poisons (BPs) in cell,
3. average coolant density in cell, and
4. average fuel temperature in cell.
Features (1) and (2) are used for classification of a bundle type, while features (3) and
(4) are the TH conditions used in feedback. The following is a list of the types of
assemblies that are in the BEAVRS reactor:
1. 1.6% enrichment no BPs - 65 bundles,
2. 2.4% enrichment no BPs - 4 bundles,
3. 2.4% enrichment 12 BPs - 28 bundles,
4. 2.4% enrichment 16 BPs - 32 bundles,
5. 3.1% enrichment no BPs - 32 bundles,
6. 3.1% enrichment 6 BPs - 12 bundles,
113
7. 3.1% enrichment 15 BPs - 4 bundles,
8. 3.1% enrichment 16 BPs - 8 bundles,
9. 3.1% enrichment 20 BPs - 8 bundles.
The SVR model is trained to incorporate these assembly types. It is important to let
SVR train on this data instead of just creating separate instances for each assembly
type because once the core is depleted there will be a range of isotopics present in
the fuel. Thus, there will be one instance of an SVR object for each diffusion equation
parameter. These diffusion parameters include:
1. fast absorption macroscopic cross section, Σ1a ,
2. thermal absorption macroscopic cross section, Σ2a ,
b 1s →2 ,
3. effective down-scatter macroscopic cross section, Σ
4. fast fission production macroscopic cross section, νΣ1f ,
5. thermal fission production macroscopic cross section, νΣ2f ,
6. fast transport macroscopic cross section, Σ1tr , and
7. thermal transport macroscopic cross section, Σ1tr .
These are the only parameters that have thermal dependence in the CMFD equations.
b are assumed to be thermal inOther parameters such as the equivalence factors, D,
variant. We chose to make this assumption to avoid performing regression and reconstruction of leakage rates during low-order iterations. If diffusion coefficients are
b equivalence factors sensitive to
not a good representation of leakage, thus making D
thermal hydraulic perturbations, this could be a poor assumption.
Before showing regression results for a subset of the diffusion parameters, the cross
section interpolation model is discussed. In conventional lattice calculations, each TH
parameter is perturbed independently of others. Thus, a multi-dimensional linear interpolation cross section model is commonly used. As an example, if we have varied
coolant density and fuel temperature in separate lattice calculations, a cross section at
a new TH condition can be represented as
∂Σ ∂Σ i
Σi T if , ρi = Σ0 T 0f , ρ0 +
T f − T 0f +
ρ i − ρ0 ,
∂T f
∂ρ
(5.6)
where Σ represents a macroscopic cross section, T f is fuel temperature, ρ is coolant
density, i is current thermal iteration and 0 represents reference conditions at which
partial derivatives were computed during lattice calculations. This works well in the
114
framework of lattice calculations. A library of these partial derivatives is initially constructed and then later used for interpolation during full core analyses.
In our case, we simulate the full core without performing lattice calculations. This
means that we will not generate a library of partial derivatives and thus, interpolation
is not necessarily linear. To account for nonlinear terms, the following cross section
model is proposed when using SVR:
h
i
Σi T if , ρi = Σ0MC T 0f , ρ0 + ΣiSVR T if , ρi − Σ0SVR T 0f , ρ0 .
(5.7)
In Eq. (5.7), Σ MC is the cross section computed from MC tallies and ΣSVR is the cross
section evaluated by the SVR algorithm. In this model, reference values are calculated
from MC tallies. Nonlinear effects are captured in the subtraction of the cross section
predicted by SVR at the reference TH conditions from cross sections predicted by SVR
at the new TH conditions. In the reactor, there are spectral effects present depending
on neighboring assemblies and whether the assembly is on the periphery near the
baffle/reflector. In this regression procedure, there is no information present in the
feature vector to describe these spectral effects. Thus, we are not able to use the cross
section predicted by SVR directly. Rather, we retain spectral information by using the
cross section from MC and changing it by the difference predicted by SVR.
To perform SVR analyses in OpenMC, an external library called LIBSVM was used
[52]. This library contains an array of SVM tools for both classification and regression applications. It is written in C++ and interfaces are provided to many other coding languages. Unfortunately, no interface existed for Fortran. A custom interface for
OpenMC was developed to pass data from Fortran to C++. It is important to note that
data in feature vectors must be scaled so that there isn’t a large difference in magnitude of different features. In this work, data was scaled to the range of zero to one.
This was necessary when performing regression on fuel temperature because values
may be large compared to enrichment, number of BPs and coolant density.
5.4.1 Support Vector Regression Testing
In this section, we perform an array of tests to determine if SVR yields acceptable
predictions for TH trends. Three different results are presented. The first is a coolant
density regression, the second is a fuel temperature regression and the third is a case
with both coolant density and fuel temperature. Details about the simulations are
listed in table 5.2. The SVR parameters listed in the table were chosen by performing
a cross-validation test.
The first test was performed on the BEAVRS 2-D model to observe coolant density
effects on diffusion parameters. In order for SVR to learn trends in data, we choose to
115
Table 5.2. Simulation parameters for SVR tests.
Parameter
Value
C [see eq. (5.4)]
1.0
e [see eq. (5.4)]
1 × 10−6
γ [see eq. (5.5)]
0.25
Neutrons per FSG
20 million
Inactive FSGs
200
Active tally batches
300
Effective Downscatter XS [1/cm]
0.02
1.6% No BPs Prediction
0.0195
2.4% 12 BPs Prediction
0.019
3.1% No BPs Prediction
2.4% 16 BPs Prediction
3.1% 16 BPs Prediction
3.1% 20 BPs Prediction
0.0185
1.6% No BPs Training Data
0.018
2.4% 12 BPs Training Data
0.0175
3.1% No BPs Training Data
2.4% 16 BPs Training Data
3.1% 16 BPs Training Data
0.017
3.1% 20 BPs Training Data
0.0165
0.016
0.0155
0.015
0.66 0.67 0.68 0.69 0.7 0.71 0.72 0.73 0.74
Coolant Density [g/cc]
Figure 5.8. Training and prediction data for coolant density regression of effective downscatter cross section.
start with random distribution of coolant density in each assembly ranging uniformly
from 0.66 g/cc to 0.74 g/cc. Therefore, each assembly type will have different diffusion parameters based on these different densities. Figure 5.8 shows results for effective down-scatter cross section as a function of coolant density. In this plot, six bundle
types are represented with different colors. Points represent tally data extracted from
OpenMC which were used as training data. Once the SVR model is trained, the enrichment and number of BPs were fixed such that cross sections could be predicted
from an array of densities for each assembly type. Results show a very linear trend for
each assembly type. As expected, as coolant density increases, the macroscopic cross
section will increase in magnitude.
116
Effective Downscatter XS [1/cm]
0.02
0.0195
0.019
0.0185
0.018
0.0175
0.66
0.67
0.68
0.69
0.7
0.71
0.72
0.73
0.74
Coolant Density [g/cc]
Figure 5.9. Training and prediction of effective down-scatter cross section of 1.6% enriched
assemblies.
Figure 5.9 shows an expanded plot of the 1.6% assembly with no BPs. This figure shows that there are differences between training data and prediction from SVR.
Because we are using MC to obtain these data, it is easy to attribute some of these
differences to noise in the simulation. After further investigation, some of these differences are due to spectral effects caused by having different neighboring assemblies.
Some of the 1.6% assemblies are near the periphery of the core surrounded by 3.1%
assemblies. This is the reason we do not use the prediction from SVR directly when
performing cross section interpolation. Rather, as indicated in eq. (5.7), we look at the
change in cross section predicted by SVR and modify the estimate from OpenMC. This
is sufficient because the slope of the down-scatter cross section is the same for each
unique assembly type, even for those that do not fall directly on the prediction line.
The next example studies the effect of fuel temperature on diffusion parameters.
The BEAVRS 2-D model was simulated with an assembly-wise random distribution
of fuel temperature uniformly between 600 K and 1200 K. Results for fast absorption
cross section are presented in fig. 5.10. We observe from this plot that SVR can predict
trends with respect to fuel temperature. As expected, as fuel temperature increases,
fast absorption increases due to the Doppler broadening effect of resonances. These
trends, however, are nonlinear and show a slight curvature. This observation is consistent with how cross sections are interpolated in current production methods. Because
multi-dimensional linear interpolation is used for all parameters in cross section libraries, the nonlinear dependence of fuel temperature is commonly converted to a
linear dependence using the square root of fuel temperature.
117
Group 1 Absorption XS [1/cm]
0.0098
1.6% No BPs Prediction
0.0096
2.4% 12 BPs Prediction
0.0094
3.1% No BPs Prediction
2.4% 16 BPs Prediction
3.1% 16 BPs Prediction
3.1% 20 BPs Prediction
0.0092
1.6% No BPs Training Data
0.009
2.4% 12 BPs Training Data
0.0088
3.1% No BPs Training Data
2.4% 16 BPs Training Data
3.1% 16 BPs Training Data
0.0086
3.1% 20 BPs Training Data
0.0084
0.0082
0.008
0.0078
600
700
800
900
1000
1100
1200
Fuel Temperature [K]
0.0083
0.00825
0.0082
0.00815
0.0081
0.00805
0.008
0.00795
0.0079
0.2
0.15
0.1
0.05
0
0.66 0.67
0.68
0.69 0.7
0.71
0.72 0.73
0.74
Coolant Density [g/cc]
Cross Section Value
Relative Difference [%]
Figure 5.10. Training and prediction data for fuel temperature regression of fast absorption
cross section.
1200
1100
1000
900
800
700
Fuel Temperature [K]
600
Figure 5.11. Training and prediction data for fuel temperature and coolant density regression
of fast absorption cross section of 1.6% assembly.
118
The last test of SVR was performed for both coolant density and fuel temperature
regression on assemblies in the 2-D BEAVRS model. In this simulation, the same random distributions of coolant density and fuel temperature were placed in assemblies.
In fig. 5.11, we present a 2-D regression plot for the fast absorption cross section as a
function of coolant density and fuel temperature. The 2-D color gradient represents
the value of fast absorption cross section predicted by SVR. As expected from previous
regression analyses, the fast absorption cross section value is highest when the coolant
density and fuel temperature are both large. To determine the relative difference between prediction data, point impulses are shown on the plot. The impulse intersects
the color gradient at the specific combination of fuel temperature and coolant density
of the training data. The point at the top of the impulse is the absolute relative difference between cross section value from training data and prediction. Results show that
2-D regression with SVR is possible and yields adequate results.
5.5
feedback results with 2-d beavrs
In this section, we present results for the different TH coupling strategies that were
outlined in section 5.2.1 for the 2-D BEAVRS model. The first set of results is for the
conventional coupling strategy, denoted by coupling method (a). In this procedure,
full MC simulations consisting of both inactive FSGs and active tally batches are performed between TH updates. This approach was used to simulate the BEAVRS 2-D
model in which 200 inactive FSGs were performed with 50 million neutrons per FSG.
After these inactive batches, 100 tally batches were simulated. Once each MC simulation finished, TH equations were solved and the MC model was updated with
assembly-wise coolant density and fuel temperature distributions. The results of this
study are shown in fig. 5.12. The Shannon entropy starts high because we used an
initial uniform source guess in each fissionable material. It should be noted that initial
coolant density and fuel temperature distributions reflected HZP conditions. For the
first MC simulation, Shannon entropy converged at a value lower than the final Shannon entropy after TH iterations. This is because TH feedback tends to make the source
distribution more uniform which is represented by a larger Shannon entropy. At the
beginning of the next MC simulation, it increases to a larger Shannon entropy because
of TH feedback. It should be noted that at the beginning of each full MC simulation,
the last source distribution from the previous MC simulation was used as an initial
guess. After a few TH iterations, Shannon entropy reached a stationary value. We took
an average of the last 30 batches to obtain a value of the converged Shannon entropy.
This will be considered the reference value for the rest of the coupling methods.
In addition to Shannon entropy, results of thermal hydraulic distributions are shown
in fig. 5.13. In this figure, the final spatial distributions of coolant density and fuel
119
7.588
Coupling Method (a)
Converged entropy
7.587
7.586
Shannon entropy
7.585
7.584
7.583
7.582
7.581
7.58
7.579
7.578
7.577
0
500
1000
1500
2000
2500
Batch
Figure 5.12. Source convergence of the BEAVRS 2-D model using coupling method (a).
temperature are plotted. As expected, assembly-averaged fuel temperature is large in
high power assemblies. In these high power assemblies, coolant density is the lowest.
At the beginning of the simulation, these distributions were spatially flat. These results
indicate that TH feedback is working as expected and yields acceptable results.
As Lee stated, batches can be wasted when performing this type of procedure [10].
Instead of running full MC simulations between TH updates, we can perform TH
feedback while the MC source is converging during inactive FSGs. This was denoted
as coupling method (b). In this study, 50 million neutrons were simulated per FSG for
300 FSGs. TH feedback began on batch 1 and was repeated every batch. To minimize
the bias in tallies, a moving window of 15 batches was used. A comparison of coupling
methods (a) and (b) is presented in fig. 5.14. Results indicate fewer batches are needed
with coupling method (b) to converge to the entropy predicted from coupling method
(a). In addition, we observe that it takes even fewer batches compared to the source
convergence of the first MC simulation using HZP conditions in coupling method (a).
Performing TH iterations during MC inactive FSGs yields faster convergence
than conventional coupling schemes where TH is performed between MC simulations.
To study the sensitivity of coupling method (b), we started TH feedback at batches 5,
10 and 20. Results are presented in fig. 5.15 along with the case that began TH feedback
at batch 1. Instead of running TH feedback after every batch, it was performed after
120
0.72
1050
0.715
0.71
0.7
Density [g/cc]
0.705
950
900
850
800
750
0.695
Temperature [K]
1000
700
0.69
650
600
(a) Coolant Density
(b) Fuel Temperature
Figure 5.13. Assembly-averaged spatial distributions of coolant density and fuel temperature
using coupling method (a) on the 2-D BEAVRS model.
7.59
Coupling Method (a)
Coupling Method (b)
Converged entropy
Shannon entropy
7.588
7.586
7.584
7.582
7.58
7.578
7.576
0
100
200
300
400
500
600
Batch
Figure 5.14. Comparison of coupling methods (a) and (b) for 2-D BEAVRS model.
121
7.59
TH start batch 1, Interval 1 batch
TH start batch 5, Interval 10 batches
TH start batch 10, Interval 10 batches
TH start batch 20, Interval 10 batches
Converged entropy
7.589
Shannon entropy
7.588
7.587
7.586
7.585
7.584
7.583
7.582
7.581
0
50
100
150
200
250
300
350
Batch
Figure 5.15. Comparison of source convergence when TH feedback begins at different batches
for coupling method (b) using the 2-D BEAVRS model.
every 10 batches. All curves approach the same entropy by batch 70. We see slightly
faster convergence with the cases that began at batch 5 and 10. This study showed
that convergence with MC, when CMFD is not active, converges rather quickly due to
damping effects when performing TH feedback.
For the case where TH feedback began at batch 10, final TH distributions were compared to reference plots from fig. 5.13. Comparison results are presented in fig. 5.16,
where relative percent differences between coupling methods (a) and (b) are shown.
The magnitude of the differences appears small, especially for density. It should be
noted that error in density will propagate into the solution of fuel temperature feedback because the temperature of coolant is needed. An interesting observation from
these results is that distributions appear similar to first harmonic distributions in the
fission source. One half of the core has a positive relative error, while the other half has
negative relative error. This implies that although the source is converged via Shannon entropy observations, higher eigenmodes are not fully dampened and contribute
to differences in TH distributions.
Convergence of core-averaged coolant density and fuel temperature is presented
in fig. 5.17. In addition, to capture convergence of spatial distributions, RMS percent
difference between successive iterations is shown on an alternate axis. In these plots,
solid lines reflect core-averaged values, while dotted lines reflect RMS differences.
Results indicate that convergence of these distributions is reached after 4-5 MC-TH
iterations. Most of the error is reduced during early iterations and convergence flattens
out. The flattening behavior is a result of statistical noise and dominance ratio effects
that were explained by fig. 5.16. Approximately 0.04% error between TH updates is
122
0.6
0.06
0.02
0
-0.02
-0.04
-0.06
0.4
Relative Percent Difference
0.04
0.2
0
-0.2
-0.4
-0.08
-0.1
Relative Percent Difference
0.08
-0.6
(a) Coolant Density
(b) Fuel Temperature
Figure 5.16. Comparison of spatial distributions of TH parameters between coupling method
(a) and (b).
reached for density and about 0.4% for fuel temperature. This is also consistent with
the magnitude of errors observed in fig. 5.16.
In the future, CMFD will be used not only for TH feedback, but transient analyses,
critical boron/rod searches, etc. It is important to study TH feedback in the context of
CMFD. Three additional cases were simulated using CMFD feedback:
1. Turning on CMFD while performing MC-TH feedback. This is similar to coupling method (b), but with CMFD activated.
2. Using CMFD fission source instead of MC source in TH coupling. This is coupling method (c), but without inner iterations between CMFD and TH equations.
3. Finally, we use CMFD to perform TH iterations and run low-order iterations
with SVR to make these distributions consistent with each other.
Results of this study are presented in fig. 5.18 along with coupling method (b) results
where TH feedback began at batch 10. For these simulations, CMFD was activated at
batch 5. A moving window of 15 batches was also used. It should be noted that the
moving window generates cross sections for CMFD regardless of how TH updates are
performed. This means that CMFD may use tallies from multiple thermal hydraulic
conditions to construct diffusion parameters. However, when performing regression,
tallies used should incorporate only the last TH conditions. The first observation we
can make from fig. 5.18 is that if CMFD is used without SVR coupling, we see oscillatory convergence behavior. Eventually, it converges to the correct Shannon entropy.
This may be due to the fact that CMFD was activated before TH occurred and is pushing the solution away from the final distribution. It is encouraging to observe that
123
10
Coupling Method (b) Average Density
Coupling Method (c) Average Density
Coupling Method (b) Density Difference
Coupling Method (c) Density Difference
0.701502
Density [g/cc]
0.7015
1
0.701498
0.701496
0.1
0.701494
RMS difference [%]
0.701504
0.701492
0.70149
0
2
4
6
8
10
12
14
0.01
MC-TH iteration
(a) Core-averaged coolant density
954.823
954.822
Temperature [K]
100
Method (b) Average Fuel Temperature
Method (c) Average Fuel Temperature
Method (b) Fuel Temperature Difference
Method (c) Fuel Temperature Difference
10
954.821
954.82
954.819
1
954.818
954.817
RMS difference [%]
954.824
0.1
954.816
954.815
954.814
0
2
4
6
8
10
12
14
0.01
MC-TH iteration
(b) Fuel Temperature
Figure 5.17. Convergence of core-averaged TH parameters for the 2-D BEAVRS model.
124
7.59
Coupling Method (b)
Coupling Method (b) w/ CMFD
Coupling Method (c) no SVR
Coupling Method (c) with SVR iterations
Converged entropy
7.589
Shannon entropy
7.588
7.587
7.586
7.585
7.584
7.583
7.582
7.581
7.58
0
50
100
150
200
250
300
Batch
Figure 5.18. Comparison of TH coupling methods (b) and (c) for the 2-D BEAVRS model.
when a fully consistent TH and CMFD is obtained using SVR, the convergence rate is
just as good as coupling method (b). We hypothesized that CMFD would yield faster
convergence, but MC feedback by itself was very good. It should be noted that during
CMFD-SVR-TH iterations, both density and coolant feedback were under-relaxed to
achieve stable convergence. An under-relaxation factor of 0.4 was chosen. This study
shows that we can use the CMFD operator to perform TH feedback while learning
how diffusion parameters depend on TH parameters with SVR.
5.6
beavrs 3-d simulations
In this section, we shift our focus to applying TH feedback to the BEAVRS 3-D model.
In the 2-D simulations, we observed that coupling method (b) and coupling method
(c) showed similar acceleration results and were in good agreement with converged
results using coupling method (a). Three simulations were performed on the 3-D
BEAVRS model: (1) coupling method (b) without CMFD, (2) coupling method (b) with
CMFD and (3) coupling method (c) with low-order CMFD-TH iterations. To achieve
adequate regression using SVR, 100 million neutrons were simulated per FSG. In addition, CMFD was activated at batch 5, while TH feedback was activated at batch 10 and
repeated every 10 batches. A moving window of 15 batches was used to remove any
bias in tallies. Both CMFD and TH feedback were performed on an assembly-sized
mesh in the radial direction and 24 uniformly-sized cells in the axial direction over
the active core. Results of these three simulations are presented in fig. 5.19. Instead
of performing a long conventional coupling simulation, results of coupling method
125
12.58
Coupling method (b)
Coupling method (b) with CMFD
Coupling method (c)
Converged entropy
12.56
12.54
Shannon entropy
12.52
12.5
12.48
12.46
12.44
12.42
12.4
12.38
12.36
0
20
40
60
80
100
120
140
160
180
200
Batch
Figure 5.19. Comparison of coupling methods for the 3-D BEAVRS model.
(b) with no CMFD active were used as the reference. The converged entropy line on
fig. 5.19 is an average of the last few batches of coupling method (b)’s results. Results
show that it takes coupling method (b) without CMFD about 160 batches to converge
a TH coupled fission source, while with CMFD, however, it takes approximately 60
batches. These savings by using CMFD are larger than what was observed in fig. 5.18
when analyzing the 2-D BEAVRS model. In addition, there is no periodic behavior in
the convergence for the 3-D BEAVRS simulation.
An additional 10 batches can be saved when using cell relative power peaking factors from CMFD along with low-order iterations using SVR. A fully converged source
that is consistent with coarse mesh TH equations was obtained in 50 batches. This is
about double the number of batches needed to converge compared with fixed HZP
TH conditions presented in section 4.8. This is encouraging compared to the number
of batches that might need to be simulated when using a conventional approach to
TH feedback.
Distributions of coolant density and fuel temperature are presented in fig. 5.20.
These 3-D plots show both the radial and axial distributions of these TH parameters.
For coolant density, lower coolant density is found in locations of high power. This
includes the four assemblies with really high peaking factors. In the axial direction,
the density starts very high at the bottom of the core and becomes smaller as energy
is gained. In any given channel, the smallest density is located at the top of the core.
For fuel temperature, the radial direction behaves similarly to coolant density, except
that locations of high power have high fuel temperature. In the axial direction, the
behavior is different than coolant density. The fuel temperature is low at both the top
126
(a) Coolant Density
(b) Fuel Temperature
Figure 5.20. Coarse mesh assembly-averaged coolant density distribution.
127
and bottom of the core because it approximately follows the power distribution and
peaks somewhere near the center of the core.
A comparison of radial power distribution is presented in fig. 5.21. These plots
represent axially-integrated fission source tallies normalized such that the average pin
power is unity. The comparison shows that the power distribution becomes flatter
when going from hot zero power conditions to hot full power conditions. In this case,
maximum pin peaking was reduced from approximately 1.8 to 1.6. Results of axial
power distribution tallies were edited from the simulations of coupling method (c)
that was presented in fig. 5.19. This distribution was compared to a HZP axial power
distribution and results are presented in fig. 5.22. In this plot, TH feedback lowers the
peak axial power and shifts the peak slightly toward the bottom of the core. This is
consistent with expectations because locations with higher coolant density have more
power produced due to better moderation of fast neutrons.
Regression models by assembly were also studied. Because coolant density and fuel
temperature vary widely in the axial direction, a regression can be performed for each
assembly separately. Therefore, we are not mixing spectral effects between assemblies.
The assumption in this approach is that these effects do not vary significantly in the
axial direction and are small compared to the changes due to density and temperature. This procedure was implemented and compared to Shannon entropy behavior
observed when using the entire core at once for SVR. Results are presented in fig. 5.23
and indicate that the same converged Shannon entropy is achieved in approximately
the same number of FSGs.
5.6.1 HFP Reactor Analysis
In previous sections in this chapter, MC-TH coupled source convergence was addressed. This section introduces a procedure that reactor analysts can use to obtain
HFP results using MC. The objective is to produce axially-integrated pin powers to
1% with a 95% relative confidence interval. Relative confidence interval means that
the 95% confidence interval was divided by the mean. To converge a fission source,
coupling method (c) with assembly-wise SVR training data was used. From results presented in fig. 5.19, it is safe to assume that the fission source will take approximately 60
FSGs to become stationary. Thus, in simulations presented in this section, 60 inactive
FSGs were used with 100 million neutrons simulated per FSG with one generation per
tally batch. Thermal hydraulic updates were performed every 10 batches until batch
60. After this batch, thermal hydraulic distributions were fixed. Tally accumulation
was performed for an additional 50 batches for a total of 110 batches. Both updated
fission source cases and fixed source cases during active batches were analyzed. To
obtain correct confidence intervals in tallies, separate independent simulations were
128
1.8
300
1.6
1.4
250
1.2
200
1
150
0.8
100
0.6
0.4
50
0.2
0
0
0
50
100
150
200
250
300
(a) Hot Zero Power
1.6
300
1.4
250
1.2
1
200
0.8
150
0.6
100
0.4
50
0.2
0
0
0
50
100
150
200
250
300
(b) Hot Full Power
Figure 5.21. Comparison of axially-integrated radial relative power distributions of the 2-D
BEAVRS model.
129
1.6
Hot Zero Power
Hot Full Power
Relative Axial Power
1.4
1.2
1
0.8
0.6
0.4
0.2
0
0
50
100
150
200
250
300
350
400
Axial location (from bottom of active fuel) [cm]
Figure 5.22. Comparison of axial relative power distributions.
12.58
SVR over whole core
SVR over each assembly
Converged entropy
12.56
12.54
Shannon entropy
12.52
12.5
12.48
12.46
12.44
12.42
12.4
12.38
12.36
0
20
40
60
80
100
120
Batch
Figure 5.23. Comparison of source convergence for assembly-wise SVR training on the 3-D
BEAVRS model.
130
12.58
12.56
12.54
Shannon entropy
12.52
12.5
12.48
12.46
12.44
12.42
12.4
12.38
12.36
0
20
40
60
80
100
120
Batch
Figure 5.24. Comparison of Shannon entropy convergence for 10 separate simulations.
performed to obtain different realizations of the MC source bank. These results were
combined to produce means and confidence intervals of relative pin powers. Due to
computational restraints, only 10 separate simulations were performed.
To ensure that 60 inactive batches were sufficient to converge the fission source,
all Shannon entropy data is displayed in fig. 5.24. Results from all ten simulations are
difficult to distinguish, but all converge by batch 60. Pin tally results were combined to
construct a mean relative pin power distribution and 95% relative confidence intervals.
These results are presented in fig. 5.25 for the cases representing conventional MC
where the fission source is updated after each tally batch. In the mean distribution
plot, the high powered assembly is observed, as well as the axial distribution of power.
Toward the radial boundaries and top and bottom of the core, power is lower. In these
locations of lower power, larger 95% relative confidence intervals are observed.
Figure 5.26 shows 95% confidence interval results for the 10 cases where the fission source was updated and the 10 cases where the fission source was fixed. These
plots again show that larger confidence intervals tend to be observed in areas of lower
power. However, the majority of the values (>95% of pins) are under the 1% level.
Another observation from fig. 5.26 is that there is not a large difference between results from updating the fission source during active batches and holding the fission
source fixed during active batches. This was also confirmed by plotting the difference
between mean relative pin powers. This difference is presented in fig. 5.27. The relative differences shown in the plot are very close to the 95% confidence intervals from
fig. 5.26. Further investigation of these running strategies is needed to determine if
there is any benefit from choosing one over the other.
131
(a) Mean
(b) 95% Confidence Interval
Figure 5.25. Pin tally data from hot full power analyses.
132
(a) Updated Fission Source
(b) Fixed Source
Figure 5.26. Distribution of 95% confidence intervals for mean axially-integrated relative pin
powers for updated and fixed fission sources.
0.01
0.008
0.004
0.002
0
-0.002
-0.004
Relative Difference
0.006
-0.006
-0.008
-0.01
Figure 5.27. Difference of mean axially-integrated relative pin powers between updated and
fixed fission source
.
133
This section brought many aspects of this thesis into a framework for performing
coupled continuous-energy MC-TH analyses using low-order CMFD-TH iterations. A
drawback of the proposed process is that it required 100 million neutrons per FSG
to converge on a stationary fission source. This was directly due to the way the SVR
algorithm was implemented and used in this work along with the moving tally window. Further work in either making this algorithm perform better or proposing an
entirely different procedure for determining how diffusion parameters depend on TH
conditions is needed to reduce the number of neutrons by a factor of 10. Once this
is in place, the desire is to produce coupled solutions with approximately the same
number of neutrons it takes to generate isothermal results.
Highlights
• Developed new MC-TH coupling procedure which allows for low-order
CMFD-TH iterations.
• Introduced multipole representation method for on-the-fly temperature
feedback to Doppler broaden Uranium resolved resonances.
• Instead of pre-generating the dependence of diffusion parameters on coolant
density and fuel temperature through lattice calculations, these dependencies were determined on-the-fly through support vector regression.
• Faster coupled TH source convergence is achieved when performing iterations during inactive generations.
• 2-D and 3-D BEAVRS models yielded stable convergence when performing
low-order iterations between CMFD-TH. For 3-D BEAVRS this also yielded
the fastest convergence.
• A framework for hot full power analyses was presented that performed
source convergence using low-order iterations between CMFD-TH. Separate simulations were performed to accumulate axially-integrated relative
pin power tallies to 1% with a 95% confidence interval.
134
6
CONCLUSIONS
6.1
summary of work
Initially, two parts of a Monte Carlo simulation were identified. The first is devoted to
performing fission source generations to reach a stationary fission source. The second
involves the accumulation of tallies that provides users with spatial power distributions and other reaction rates. These aspects of a Monte Carlo simulation were investigated using the OpenMC code with a benchmark that models a typical commercial
pressurized water reactor called BEAVRS.
While investigating fission source convergence, it was observed that it took a few
hundred fission source generations to reach a stationary value of Shannon entropy for
2-D full core models. A study was performed with various numbers of neutrons simulated per fission source generation and it was concluded that a few million neutrons
was enough to remove under-sampling bias. When simulating the 3-D BEAVRS reactor model, it was observed that slightly more fission source generations were needed
to converge the fission source because both radial and axial distributions needed to
be converged. A study was performed for this 3-D model to determine how many
neutrons are required to yield good source convergence, and it was observed that a
few million neutrons should be simulated per fission source generation. These studies
showed that without some acceleration, it takes many fission source generations to
converge a fission source.
For the tally accumulation stage of the simulation, studies were performed to understand their convergence rate. In some Monte Carlo codes, including OpenMC, it
is assumed that tally batches are independent from one another and converge at an
√
ideal rate of 1/ n, where n is the number of tally realizations. This is only true if these
tally batches are not correlated. However, for high dominance ratio commercial reactors such as BEAVRS, high batch-to-batch correlation exists. Because neutron source
sites of one generation are directly sampled from fission sites of the previous generation, there is a high degree of coupling between generations. This effect is exacerbated
by models with high dominance ratio because it is difficult to remove contributions
from higher eigenmodes. To quantify the rate of convergence, edits of batch-wise fission source tallies were compared to reference distributions to compute a root mean
square percent error of fission source distribution. Plots of this error showed very
erratic convergence behavior and less than ideal convergence rates indicating that correlation was present. This was confirmed by computing autocorrelation coefficients
135
between batch-wise edits of fission source tallies. These autocorrelation coefficients
confirmed that high correlation between batches was present. Analytic models based
on autocorrelation coefficients were developed and compared well with observed convergence rates. Because correlation is directly due to updating the fission source at
every batch during tally accumulation, fixed source simulations were investigated. In
these simulations, fission source generations were first performed to obtain a stationary fission source. Once converged, this fission source was fixed and neutrons were
sampled from this distribution with different random numbers. This yielded very
smooth convergence rates, but small biases existed between final converged tallies
and reference values. This was due to the truncation of source sites from a theoretical
continuous distribution and fixing them during the simulation.
To address source convergence during a Monte Carlo simulation, Coarse Mesh Finite Difference (CMFD) diffusion acceleration was introduced. In this method, diffusion parameters are constructed from Monte Carlo tallies. When tallies are converged,
CMFD equations yield equivalent results to Monte Carlo tallies averaged over the
same discretized spatial and energy mesh. However, during the first part of a Monte
Carlo simulation, tallies are not yet converged. By solving CMFD equations based on
these tallies and then modifying the Monte Carlo source bank to match the CMFD
source distribution, a stationary fission source can be reached in fewer fission source
generations. A unique feature of the CMFD implementation in OpenMC is that it
can use albedo boundary conditions derived from partial current tallies accumulated
during simulations. This allows users to only have to perform CMFD computations
over the active core region and not the surrounding structures. This is a very important feature because it eliminates the issue of obtaining meaningful tallies in locations
far from the core. CMFD acceleration was tested on a high dominance ratio 1-D slab
where the number of generations to converge was reduced by a factor of 10.
Studies were performed using CMFD to observe its effectiveness on accelerating
source convergence on the 2-D BEAVRS model. The first conclusion from this work is
that tallies from the first batch are not useful. In addition, better results were obtained
when starting source particles uniformly in only fissionable materials, rather than
uniformly over all core materials and portions of the reflector. By not including tallies
from the first batch of neutrons, the CMFD source calculated after the second batch
of neutrons was more symmetric and yielded more reasonable peaking factors. It is
critical to feed back a good initial source distribution to the Monte Carlo source bank
to achieve effective acceleration.
Different tally estimators were used to determine which yielded the best acceleration. For the same number of simulated neutrons, tracklength estimators yielded
better results. This is because all tallies are scored to each time a particle is moved.
This yields far more samples per tally bin compared to analog tallies that only score
136
when a specific event (e.g., scattering) occurs. Because tallies are accumulated while
the source is converging, a small bias in diffusion parameters may exist. To remove
any bias, two tally resetting procedures were introduced. In one procedure, tallies are
reset at specific batches while a moving tally window was used in the other procedure. Resetting at specific batches was very effective at removing some bias observed
in the CMFD eigenvalue. For the moving tally window procedure, results were noisier because fewer samples were used per CMFD update. However, this procedure was
still effective in removing bias. This type of procedure is useful for thermal hydraulic
updates when tallies must be reset at each feedback step.
In conventional two-group reactor analysis methods, an effective down-scatter cross
section is used in lieu of a full scattering matrix containing up-scattering. A study was
performed to look at differences between using a full scattering matrix and an effective
down-scatter cross section. For the same conditions, faster convergence was reached
with an effective down-scatter cross section. Results indicated that the full scatter matrix was still slightly biased even after applying one tally reset. More resetting would
be needed in order to fully remove any bias from having an up-scatter cross section.
Using an effective down-scatter cross section instead of a full scattering matrix is also
important for thermal hydraulic feedback. By eliminating up-scattering, the number
of diffusion parameters for feedback is reduced. The next simulations studied spatial
and energy meshes. Assembly-, quarter assembly- and pin-sized CMFD mesh were
simulated. Results indicated that an assembly-sized mesh was adequate for acceleration. No further benefit was observed from using finer mesh. For the energy mesh
cases, one, two, four and eight group structures were tested. Results with one energy
group were noticeably worse than the others. Two energy groups were enough to
accelerate convergence of the BEAVRS model.
Accurate cell-averaged diffusion coefficients can be difficult to calculate from Monte
Carlo simulations. Although these parameters do not influence neutron balance because of the application of equivalence factors, they impact convergence behavior. Two
approximations to diffusion coefficients were studied. The first was the out-scatter
approximation and the second was energy condensation. More accurate diffusion coefficients were obtained by applying an in-scatter correction to hydrogen anisotropic
scattering and collapsing a fine energy distribution of diffusion coefficients to coarse
group diffusion coefficients. These two definitions of diffusion coefficients, in addition
to isotropic diffusion coefficients, were used in CMFD acceleration. It was concluded
that isotropic diffusion coefficients should not be used. Slight improvement in acceleration was observed when using diffusion coefficients with the proper energy condensation and in-scatter correction compared to diffusion coefficients generated from few
group transport cross sections.
137
Before thermal hydraulic feedback analyses were undertaken, other applications of
CMFD were investigated. The first application was to compute adjoint distributions.
By transposing CMFD matrices, a mathematical adjoint could be constructed. The resulting adjoint flux described the importance of energy groups and spatial locations
to producing fission reactions. These distributions are very useful for perturbation theory and calculation of kinetics parameters. Another application of the CMFD framework is to compute higher eigenmodes. In addition to calculating distributions, the
two largest eigenvalues can be used to calculate the dominance ratio. This parameter
yields both numerical and physical insight into the problem that is being simulated.
By using asymptotic convergence of CMFD power iterations, an on-the-fly dominance
ratio was calculated during Monte Carlo simulations.
Feedback of coolant density and fuel temperature to Monte Carlo simulations were
studied. In order to perform these coupled neutronic and thermal hydraulic analyses
using low-order iterations with CMFD, the windowed multipole representation and
support vector regression machine learning tools were implemented. The multipole
method provided the capability to perform on-the-fly Doppler Broadening which adjusted the temperatures of the resolved resonances for Uranium-235 and Uranium-238.
This was the first application of this procedure to reactor analysis. Testing of this capability resulted in good agreement with conventional methods of representing cross
sections at discrete temperatures. To iterate between CMFD and thermal hydraulics,
the dependence of diffusion parameters on fuel temperature and coolant density must
be approximately known. Instead of performing lattice calculations to pre-generate
these relationships, they were learned on-the-fly between TH updates using support
vector regression. Thus, after thermal hydraulic equations were solved, new diffusion
parameters were predicted by support vector regression algorithms and a new CMFD
operator was constructed.
Various coupling frameworks were introduced in this work. The first coupling procedure is to split up the Monte Carlo simulation and thermal hydraulic equations. In
this method, a full Monte Carlo simulation is performed, thermal hydraulic equations
are solved and then an entirely new Monte Carlo case is simulated. Results from the
2-D BEAVRS model indicated that many batches are needed and the process is very
inefficient. A better coupling framework is to allow thermal hydraulic feedback to
be performed while the Monte Carlo fission source is converging. In this procedure,
tallies are accumulated during inactive fission source generations. A tally of power
distribution is then used in the thermal hydraulic model. This reduced the amount of
fission source generations by a factor of 10 when analyzing the 2-D BEAVRS model.
The 3-D BEAVRS model took a few hundred batches to converge the fission source
with thermal hydraulic feedback. A variant of this method is to activate CMFD while
the source is converging. This resulted in oscillatory behavior in source convergence
138
for the 2-D BEAVRS model, but very good behavior for the 3-D model. A reduction
of a factor of three in the number of fission source generations was observed by using
CMFD when thermal hydraulic feedback is being applied.
A new coupling framework was implemented that provided a method to couple
the thermal hydraulic model to the low-order CMFD operator via support vector
regression before feeding back information to Monte Carlo. This allowed for faster
propagation of new thermal hydraulic information by generating a consistent CMFD
source distribution with new thermal hydraulic distributions. When the Monte Carlo
source bank is adjusted by the CMFD source, it will also be consistent with coolant
density and fuel temperature. For the 2-D BEAVRS model, stable convergence was
observed, but no savings in the number of batches compared to coupling with only
Monte Carlo. However, in the 3-D BEAVRS model, convergence was reached sooner using low-order iterations compared to Monte Carlo-thermal hydraulic feedback when
CMFD was used only as a source convergence accelerator. In either case, 3-D BEAVRS
results indicated that CMFD acceleration is an important tool to use during thermal
hydraulic feedback simulations.
All information presented in this thesis culminates into a procedure that can be
used for reactor analysis. We showed that thermal hydraulic feedback should be performed during inactive fission source generations. Faster convergence can be reached
by activating CMFD and using it as the primary thermal hydraulic coupling tool by
performing low-order operations. Once a fission source is converged, we fixed TH conditions and explored whether to update or fix the fission source during tally accumulation. Separate independent simulations were performed to achieve 95% confidence
intervals less than 1% for axially-integrated relative power for 95% of the pins. Results
presented in this thesis required an infeasible number of neutrons to produce results
if this framework is to be used for routine reactor analysis. Execution times can be
reduced by improving the regression process when diffusion parameters are related
to thermal hydraulic conditions.
139
6.2
contributions
1. Quantified amount of correlation during tally accumulation for BEAVRS
model.
2. Compared analytic models for tally convergence rates based on autocorrelation coefficients with observed convergence data.
3. Implemented CMFD acceleration framework in a continuous-energy MC
code using on-the-fly albedo boundary conditions from MC partial current
tallies.
4. Performed a wide array of sensitivity studies for CMFD acceleration, including:
• initial source distributions from CMFD,
• analog and tracklength tally estimators,
• tally resetting procedures to remove any bias, including a moving tally
window, and
• spatial and energy meshes.
5. Investigated different representations of diffusion coefficients using MC tallies and their impact on CMFD acceleration.
6. Applied CMFD framework to calculate higher harmonic and adjoint distributions.
7. Used multipole representation method for Doppler broadening of Uranium
isotopes in resolved resonance range when performing fuel temperature
feedback.
8. Incorporated support vector regression, a machine learning tool, to determine how diffusion parameters depend on fuel temperature and coolant
density.
9. Developed new procedures for thermal feedback using low-order CMFD to
accelerate source convergence.
140
6.3
future work
6.3.1 Tally Convergence
One of the most surprising results was the tally convergence behavior when performing conventional Monte Carlo simulations. High correlation was present between tally
√
batches and convergence rates were far from the ideal rate of 1/ n for the BEAVRS
reactor. In addition, erratic behavior in Shannon entropy was observed, and in some
cases, error increased. Fixed source simulations were introduced as a means to reduce correlation between tally batches. In this procedure, once a source is stationary,
the Monte Carlo source bank is held constant for the remainder of the simulation.
Although convergence results were very smooth, a bias existed because only one realization of the source bank was used. Thus, in order to obtain confidence intervals
in results, separate simulations are performed. More studies need to be performed to
determine if having a fixed source during tally accumulation is the best method. Another solution to this problem is to develop a Monte Carlo source iteration procedure
that yields less correlation between tally batches.
6.3.2 Acceleration Operators
In this work, Coarse Mesh Finite Difference (CMFD), a nonlinear diffusion acceleration
method, was used to obtain faster source convergence rates. However, CMFD is only
one of many types of operators that can be implemented. There are an array of higher
order diffusion methods, such as nodal methods, that can provide a better prediction
of a fission source by reducing spatial truncation errors. Another class of potential loworder operators are based on the neutron transport equation. These provide higher
angular resolution and can reduce sensitivity of nonlinear equivalence parameters.
With any acceleration method, there is a trade-off between number of batches saved
and added cost of performing acceleration.
6.3.3 Machine Learning
The vast field of machine learning has not been thoroughly investigated in Monte
Carlo neutron transport. In this work, we applied one machine learning tool, support
vector regression, to one specific case of learning how diffusion parameters depend
on coolant density and fuel temperature. There are many other situations where machine learning can be applied. Some future work in this area could study methods for
understanding when/if a fission source is converged. Because machine learning rec-
141
ognizes trends in data, it could be studied in the context of noise in the Monte Carlo
simulation and uncertainty analyses.
6.3.4 Thermal Feedback
This thesis described different types of coupling between thermal hydraulics, Monte
Carlo neutronics and CMFD diffusion neutronics. It is clear that CMFD should be
used when performing thermal hydraulic feedback during inactive fission source generations. However, 100 million neutrons were required when performing low-order
iterations with CMFD to resolve support vector regression information and have stable feedback. More studies should be performed with respect to the regression process
to reduce this number. There are many degrees of freedom that can be investigated.
In this work, only support vector machines were investigated. Other regression algorithms and ways to improve the process of relating diffusion parameters to thermal
hydraulic conditions should be studied.
Although a coarse mesh thermal hydraulic model was used in this work, it is important to incorporate a higher fidelity model. Because we can obtain very localized
power estimates from Monte Carlo, it can be coupled to a very fine thermal hydraulic
solution to predict phenomena such as critical heat flux. Finally, a future look at how
thermal feedback will be used in the context of transient analyses and depletion studies must be performed.
142
BIBLIOGRAPHY
[1] Robert E. Macfarlane. PSR-480/NJOY99.0: Code System for Producing Pointwise
and Multigroup Neutron and Photon Cross Sections from ENDF/B Data. Los Alamos
National Laboratory, 2000.
[2] Joel Rhodes and Malte Edenius. CASMO-4. A Fuel Assembly Burnup Program.
User’s Manual. Studsvik of America, ssp-09/443-u rev 0, proprietary edition, 2001.
[3] Weston M. Stacey. Nuclear reactor physics. Wiley-VCH, Weinheim, 2007.
[4] LJ Covington. SIMULATE-3: Advanced three-dimensional two-group reactor analysis
code. User’s manual. Studsvik of America, 1995.
[5] Paul Kollath Romano. Parallel algorithms for Monte Carlo particle transport simulation on exascale computing architectures. PhD thesis, Massachusetts Institute of
Technology, 2013.
[6] Paul K. Romano, Andrew R. Siegel, Benoit Forget, and Kord Smith. Data decomposition of Monte Carlo particle transport simulations via tally servers. Journal of
Computational Physics, 252:20–36, 2013.
[7] Nicholas Horelik, Benoit Forget, Andrew Siegel, and Kord Smith. Domain decomposition and terabyte tallies with the OpenMC Monte Carlo neutron transport code. In Proceedings of PHYSOR 2014, Kyoto, Japan, September 28 - October
3 2014.
[8] Nick E. Horelik, Bryan R. Herman, Benoit Forget, and Kord S. Smith. Benchmark
for evaluation and validation of reactor simulations (BEAVRS). In Proceedings of
M&C 2013, Sun Valley, ID, USA, May 5 - 9 2013.
[9] Daniel J. Kelly III, Brian N. Aviles, and Bryan R. Herman. MC21 analysis of the
MIT PWR benchmark: Hot zero power results. In Proceedings of M&C 2013, Sun
Valley, ID, USA, May 5 - 9 2013.
[10] Min Jae Lee. Monte Carlo Method with Coarse Mesh Finite Difference Formulation for
Efficient Power Reactor Analysis. PhD thesis, Seoul National University, 2013.
[11] Emily R. Wolters. Hybrid Monte Carlo–Deterministic Neutron Transport Methods
Using Nonlinear Functionals. PhD thesis, University of Michigan, 2011.
143
[12] Jeffrey A. Willert. Hybrid Deterministic/Monte Carlo Methods for Solving the Neutron Transport Equation and k-Eigenvalue Problem. PhD thesis, North Carolina State
University, 2013.
[13] Jeffrey A. Willert, C.T. Kelley, D.A. Knoll, and H. Park. A hybrid approach to
the neutron transport k-eigenvalue problem using NDA-based algorithms. In
Proceedings of M&C 2013, Sun Valley, ID, USA, May 5 - 9 2013.
[14] Jeffrey Willert, C.T. Kelley, D.A. Knoll, and H. Park. Scalable hybrid deterministic/Monte Carlo neutronics simulations in two space dimensions. In Proceedings of Distributed Computing and Applications to Business, Engineering & Science
(DCABES), Thames, Surrey, UK, September 2 - 4 2013.
[15] Jeffrey A. Willert and C.T. Kelley. Efficient solutions to the NDA-NCA low-order
eigenvalue problem. In Proceedings of M&C 2013, Sun Valley, ID, USA, May 5 - 9
2013.
[16] Emily R. Wolters, Edward W. Larsen, and William R. Martin. Generalized hybrid
Monte Carlo–CMFD methods for fission source convergence. In Proceedings of
M&C 2011, Rio de Janeiro, Brazil, May 8 - 12 2011.
[17] Min Jae Lee, Han Gyu Joo, Deokjung Lee, and Kord Smith. Monte Carlo reactor calculation with substantially reduced number of cycles. In Proceedings of
PHYSOR 2012, Knoxville, Tennessee, USA, April 15 - 20 2012.
[18] Min Jae Lee, Han Gyu Joo, Deokjung Lee, and Kord Smith. Multiset CMFD
acceleration of source convergence for three-dimensional Monte Carlo reactor
calculations. Transactions of the American Nuclear Society, 107:1158–1160, 2012.
[19] Min Jae Lee, Han Gyu Joo, Deokjung Lee, and Kord Smith. Coarse mesh finite
difference formulation for accelerated monte carlo eigenvalue calculation. Annals
of Nuclear Energy, 65:101–113, 2014.
[20] Daniel Kelly, Thomas Sutton, and Stephen Wilson. MC21 analysis of the nuclear
energy agency Monte Carlo performance benchmark problem. In Proceedings of
PHYSOR 2012, Knoxville, Tennessee, USA, April 15-20 2012.
[21] Paul K. Romano and Benoit Forget. The OpenMC Monte Carlo particle transport
code. Annals of Nuclear Energy, 51:274 – 281, 2013.
[22] Paul K. Romano and Benoit Forget. Parallel fission bank algorithms in Monte
Carlo criticality calculations. Nuclear Science and Engineering, 170:125–135, 2012.
144
[23] Forrest Brown. On the use of Shannon entropy of the distribution for assessing
convergence of Monte Carlo criticality calculations. In Proceedings of PHYSOR
2006, Vancouver, BC, Canada, September 10 - 14 2006.
[24] Taro Ueki and Forrest Brown. Autocorrelation and dominance ratio in Monte
Carlo criticality calculations. Nuclear Science and Engineering, 145:279–290, 2003.
[25] Eric Dumonteil et al. Source convergence diagnostics using Boltzmann entropy
criterion application to different OECD/NEA criticality benchmarks with the 3D Monte Carlo code Tripoli-4. In Proceedings of PHYSOR 2006, Vancouver, BC,
Canada, September 10 - 14 2006.
[26] W. David Kelton and Averill M. Law. Simulation modeling and analysis. McGraw
Hill, Boston, 2000.
[27] Maurice George Kendall and Stuart Alan. The advanced theory of statistics. Vols. II
and III. Hafner, New York, 1961.
[28] R.J. Brissenden and A.R. Garlick. Biases in the estimation of keff and its error by
Monte Carlo methods. Annals of Nuclear Energy, 13:63–83, 1986.
[29] Alain Hébert. Applied reactor physics. Presses Internationales Polytechnique, Montréal, 2009.
[30] Daniel F. Gill. Newton-Krylov methods for the solution of the k-eigenvalue problem in
multigroup neutronics calculations. PhD thesis, Pennsylvania State University, 2010.
[31] H. Park, D.A. Knoll, and C.K. Newman. Nonlinear acceleration of transport
criticality problems. Nuclear Science and Engineering, 172:52–65, 2012.
[32] S Balay et al. PETSc Users Manual Revision 3.4. Argonne National Laboratory,
2013. Software available at http://http://www.mcs.anl.gov/petsc.
[33] Kord S Smith and Joel D Rhodes III. Full-core, 2-D, LWR core calculations with
casmo-4e. In Proceedings of PHYSOR 2002, Seoul, Korea, October 7 - 10 2002.
[34] D.A. Knoll, H. Park, and C. Newman. Acceleration of k-eigenvalue/criticality
calculations using the Jacobian-free Newton-Krylov method. Nuclear Science and
Engineering, 167:133–140, 2011.
[35] Bryan R. Herman, Benoit Forget, Kord Smith, and Brian N. Aviles. Improved
diffusion coefficients generated from Monte Carlo codes. In Proceedings of M&C
2013, Sun Valley, ID, USA, May 5 - 9 2013.
[36] Rudi J.J. Stamm’ler and Máximo J. Abbate. Methods of steady-state reactor physics
in nuclear design. Academic Press, London, 1983.
145
[37] Sean Carney et al. Fission matrix capability for MCNP, part ii - applications. In
Proceedings of M&C 2013, Sun Valley, Idaho, USA, May 5 - 9 2013.
[38] MATLAB. version 8.1.0.604 (R2013a). The MathWorks Inc., Natick, 2013.
[39] George I. Bell and Samuel Glasstone. Nuclear reactor theory. R.E. Krieger Publishing Company, Malabar, 1979.
[40] Eugene L. Wachspress. Iterative solution of elliptic systems: and applications to the
neutron diffusion equations of reactor physics. Prentice-Hall, Englewood Cliffs, 1966.
[41] Brian R. Nease and Taro Ueki. Time series analysis and monte carlo methods
for eigenvalue separation in neutron multiplication problems. Journal of Computational Physics, 228:8525–8547, 2009.
[42] Wolfgang Wagner, Alfred Kruse, and Hans-Joachim Kurtzschmar. Properties of
water and steam: the industrial standard IAPWS-IF97 for the thermodynamic properties and supplementary equations for other properties: tables based on these equations.
Springer-Verlag, Berlin, 1998.
[43] Neil E. Todreas and Mujid S. Kazimi. Nuclear systems, volume 1. CRC Press, Boca
Raton, 2010.
[44] Benoit Forget, Sheng Xu, and Kord Smith. Direct doppler broadening in Monte
Carlo simulations using the multipole representation. Annals of Nuclear Energy,
64:78–85, 2014.
[45] Colin Josey, Benoit Forget, and Kord Smith. Efficiency and accuracy evaluation
of the windowed multipole direct doppler broadening method. In Proceedings of
PHYSOR 2014, Kyoto, Japan, Sep. 28 - Oct. 3 2014.
[46] W. Bernnat, M. Buck, M. Mattes, W. Zwermann, I. Pasichnyk, and K. Velkov.
Coupled monte carlo neutronics and thermal hydraulics for power reactors. In
Proceedings of PHYSOR 2012, Knoxville, Tennessee, USA, April 15 - 20 2012.
[47] Timothy H. Trumbull. Treatment of nuclear data for transport problems containing detailed temperature distributions. Nuclear Technology, 156:75–86, 2006.
[48] Tuomas Vitanen and Jaakko Leppänen. Explicit treatment of thermal motion in
continuous energy Monte Carlo tracking routines. Nuclear Science and Engineering,
171:165–173, 2012.
[49] G. Yesilyurt, W.R. Martin, and F.B. Brown. On-the-fly doppler broadening for
Monte Carlo codes. Nuclear Science and Engineering, 171:239–257, 2012.
146
[50] Nello Chistianini and John Shawe-Taylor. An Introduction to Support Vector Machines and other kernal-based learning methods. Cambridge University Press, Cambridge, 2000.
[51] Corinna Cortes and Vladimir Vapnik. Support-vector networks. Machine learning,
20:273–297, 1995.
[52] Chih-Chung Chang and Chih-Jen Lin. LIBSVM: A library for support vector
machines. ACM Transactions on Intelligent Systems and Technology, 2:27:1–27:27,
2011. Software available at http://www.csie.ntu.edu.tw/~cjlin/libsvm.
147