Begin a discussion of the stiffness method. The stiffness... method. Stiffness Method
advertisement

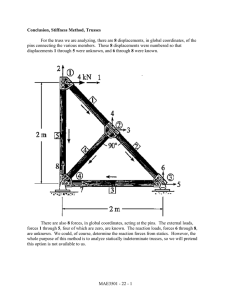
Stiffness Method Begin a discussion of the stiffness method. The stiffness method is a "finite element" method. Examine a structure, and it may be highly indeterminate. All the applied loads will be known. None of the internal loads will be known. Some deflections, will be known, generally at supports. None of the internal deflections will be known. For each element of the structure, a stiffness, how much load is necessary to cause a unit deflection, will be determined. In general, there are many unit deflections of an element, measured at different locations on the element. And there are many loads applied at those same different locations on the element. For each element, a small matrix is determined that relates each unit deflection to the amount of each load required to cause that unit deflection. All the small matrices, one for each element, will be combined into a large matrix for the structure as a whole. That large matrix will be combined, with the known and unknown loads and known and unknown deflections, into one large matrix equation for the structure. When that large matrix equation is solved, all the deflections and all the internal loads will have been determined. I will now quickly review all the linear algebra you will need in this course, and introduce a topic you may have never been exposed to. Matrix a 11 a 21 A a M 1 a 12 a 1N a 22 a 2N a M 2 a MN A matrix is a rectangular array of numbers. Each element of the matrix is located with two subscripts, I and J. The first subscript, I, ranging from 1 to M, locates the row, indexed vertically down from the top. The second subscript, J, ranging from 1 to N, locates the column, indexed horizontally to the right from the left. The shape of the matrix is "M by N." If M = 1, the matrix has only one row, and is referred to as a "row matrix." If N = 1, the matrix has only one column, and is referred to as a "column matrix." MAE3501 - 20 - 1 Addition and Subtraction Matrices can be added and subtracted only if they are the same shape. Matrices are added and subtracted term-by-term. 6 7 A 2 1 5 8 B 1 4 11 1 AB 1 5 1 15 AB 3 3 Multiplication by a Scalar A matrix of any shape can be multiplied by a scalar. When a matrix is multiplied by a scalar, every element of the matrix is multiplied by the scalar. 4 1 A 6 2 k6 24 6 kA 36 12 Matrix Multiplication Matrices can be multiplied together only if their shapes are conformable. This means that the number of columns in the first matrix must equal the number of rows in the second matrix. The result of a matrix multiplication is a matrix. The product matrix has the same number of rows as the first matrix and the same number of columns as the second matrix. To determine the I - J element of the product matrix, (1) Multiply the elements of the I th row of the first matrix, term-by-term, with the elements of the J - th column of the second matrix. (2) Add up the products. 2 2 4 3 A 6 1 6 1 7 a11 a1 2 (2) 4 (6) 3 (7) 49 a 21 a 2 1 (2) 6 (6) 1 (7) 41 49 A 41 MAE3501 - 20 - 2 Transpose The transpose of an M by N matrix is an N by M matrix. The I - J element of the transpose is equal to the J - I element of the original matrix. 6 7 A 2 1 6 2 AT 7 1 The transpose of a column matrix is a row matrix, and vice versa. A 7 3 7 AT 3 Identity Matrix An identity matrix is denoted by I, and is always square. In other words, M N . A square matrix is usually referred to as an N by N matrix. Each diagonal element of an identity matrix is equal to 1. Each non-diagonal element is equal to 0. The 3 by 3 identity matrix. 1 0 0 0 1 0 0 0 1 Inverse Matrix An inverse is defined only for square matrices. The inverse of a square matrix, A, is denoted by A 1 . A A 1 A 1 A I This is an exception to the general rule that for two matrices, A and B, both square and the same size, AB B A There are plug-and-chug methods to determine the inverse of a square matrix. The time required is about ten minutes for a 3 by 3 matrix. Unfortunately, the number of calculations increases as the factorial of the matrix size. Matrices will be inverted in this class by resorting to some sort of water-cooled slide rule. MAE3501 - 20 - 3 Matrix Partitioning It can be very useful, when multiplying matrices, to partition them, although I have never seen the advantage. However, it will be necessary to partition matrices when working with the stiffness method. In the following example, the matrix is partitioned into a 2 by 2 matrix, each element of which is itself a matrix. The individual elements may have different shapes. Note that there is nothing unique about the manner in which the matrix is partitioned. a 11 A a 21 a 31 a 12 a 13 a 14 a 22 a 23 a 24 a 32 a 33 a 34 A 11 A 21 A 12 A 22 A11 a11 A12 a12 a13 a14 a 21 A 21 a 31 a 22 a 23 a 24 A 22 a 32 a 33 a 34 In the following example, the product of two matrices is evaluated by partitioning each of the two matrices. The "elements" of the product matrix, each of which is a matrix, are determined by matrix multiplying the "elements" of the two partitioned matrices, as though they were numbers rather than matrices. The first matrix has been partitioned into a 2 by 2 matrix (of matrices), and the second matrix into a 2 by 1 matrix (of matrices). The two matrices are conformable. The product matrix will be a 2 by 1 matrix (of matrices). 4 1 2 0 A 3 6 A AB 11 A 21 1 5 8 2 1 0 8 B 7 4 A 12 B1 A 11 B1 A 12 B 2 A 22 B 2 A 21 B1 A 22 B 2 4 1 2 1 8 4 A 11 B1 2 0 0 8 4 2 1 A 12 B 2 5 7 7 4 4 35 20 MAE3501 - 20 - 4 0 1 A 11 B11 A 12 B 21 39 18 2 1 A 21 B1 6 3 12 18 0 8 A 22 B 2 8 7 4 56 32 A 21 B1 A 22 B 2 68 50 0 1 A B 39 18 68 50 In general, care must be taken when partitioning to ensure that all the resulting submatrices are conformable. This will not be of concern in the stiffness method, because it will always be obvious how the matrices will be partitioned. MAE3501 - 20 - 5 Stiffness Method, Trusses We will consider the use of the stiffness method to analyze trusses, composed of twoforce, pin-ended members, because these are the simplest structures. The first steps are to number the members and joints, choose a direction for each member, create a global coordinate system, and define the displacements at each joint relative to the global coordinate system. Perform these tasks in the following manner. The following truss is the truss we will analyze. It is statically determinate, so that we can easily determine the member forces in order to check our work. However, the method is completely general, and can be used to analyze highly indeterminate trusses, that cannot be analyzed by any method you have learned in your engineering classes. MAE3501 - 20 - 6 1. Number the members, placing a box around each number. The order is immaterial, but an orderly procedure is preferable. 2. Number the joints, placing a circle around each number. The order is again immaterial. 3. For each member, choose a direction, indicated by an arrow next to the member. Each arrow defines, for its member, a near end, the tail of the arrow, and a far end, the head of the arrow. The direction of each member may be chosen arbitrarily. 4. Create a global coordinate system. Use X positive to the right and Y positive upward. 5. At each joint, draw a displacement in each positive global-coordinate direction. Number these displacements in the following order, which is required for proper partitioning of matrices. Unknown displacements first, followed by known displacements. In this example, there are 5 unknown displacements, numbered 1 through 5, and 3 known displacements, numbered 6 through 8. The displacement numbers of the 5 unknown displacements are arbitrary, as are the displacement numbers of the 3 known displacements. When possible, assign consecutive numbers to both displacements at a joint, X before Y. The known displacements, as is frequently the case, are zero because of the nature of the supports. Joint 3 cannot move in the Y direction, while joint 4 cannot move in either the X or Y direction. You may choose to analyze this truss either by hand or by creating a truss-analysis computer program. In a truss-analysis computer program, the number and coordinates of each joint are input, then each member is defined by identifying the joint numbers of the near end and far end of the member. The program then determines the lengths of the members, and the orientations of the members relative to the global coordinate system, as will be explained presently. The next step is to create local coordinates for each member. The local coordinates are denoted by X and Y . The X coordinate is oriented along the member, and is positive in the direction of that member's arrow. The Y coordinate is perpendicular to the member, positive 90 counter-clockwise from the positive X axis, a right-handed coordinate system. N and F denote the near and far ends of the member, respectively. The origin of the local coordinate system is placed at the near end of the member, as shown. F Y X N MAE3501 - 20 - 7 The next step is to develop the stiffness matrix, k , in local coordinates, for each member. A weightless member, pinned at its ends, to which no forces are applied except by the pins, must be in either pure tension or pure compression. The forces exerted on the ends of the member must lie along the X axis. Displacements of the ends of the members can occur in either the X or Y directions, but small displacements in the Y direction cannot develop axial forces in the member. Therefore, we deal with only two displacements, one at each end of the member, parallel to the member, and determine the forces applied to the member at each end, caused by each displacement with the other end held fixed. The elements of a stiffness matrix for a truss have the same units as a spring constant. Use subscripts of 1 and 2 to refer to the near and far ends respectively. k IJ denotes the force applied to end I, positive in the X direction, when end J is displaced a unit amount in the positive X direction, with the other end held fixed. k 11 denotes the force applied to the near end, in the X direction, when the near end is displaced a unit amount in the X direction, with the far end held fixed. This force is compressive, and points in the positive X direction. The magnitude of this force, denoted by P, is determined from the following relationship that was determined in undergraduate strength of materials. 1 PL AE (20.1) k 11 P AE L (20.2) Because of the sign convention, this is a positive force, although compressive forces have been negative this course and in previous courses. k 21 denotes the force applied to the far end, in the X direction, when the near end is displaced a unit amount in the X direction, with the far end held fixed. This force is also compressive, but now points in the negative X direction. k 21 AE L (20.3) k 12 denotes the force developed at the near end, in the X direction, when the far end is displaced a unit amount in the X direction, with the near end held fixed. This force is tensile, and points in the negative X direction. k 12 AE L (20.4) MAE3501 - 20 - 8 k 22 denotes the force developed at the far end, in the X direction, when the far end is displaced a unit amount in the X direction, with the near end held fixed. This force is also tensile, but now points in the positive X direction. k 22 AE L (20.5) Assemble the k matrix. AE k L AE L A E L A E 1 1 A E L 1 1 L (20.6) Except for different numerical values of A, E, and L, this k is the local stiffness matrix for every member of any truss. Do not be upset if the numerical values seem much too large. The force required to change the length of a truss member by one unit, particularly one meter, is obviously humongous. Very small changes in length will result in the actual forces having realistic magnitudes. MAE3501 - 20 - 9 Denote the displacements of the ends of a member, in local coordinates, by d N and d F . Denote the forces exerted on the ends of a member, in local coordinates, by q N and q F . The force exerted on an end of a member is the sum of the displacements of the two ends, each multiplied by the appropriate element of the stiffness matrix. This yields the following two equations. q N k 11 d N k 12 d F (20.7) q F k 21 d N k 22 d F (20.8) Define two column matrices. q q N q F (20.9) d d N d F (20.10) Equations (20.7) and (20.8) can be expressed by the following matrix equation. q k d (20.11) MAE3501 - 20 - 10 The next step is to transform from local to global coordinates. X Y Y X X Define X and Y as the angles between the positive X axis and the positive X and Y axes. There are, of course, two possible choices for each angle, but it doesn't matter which angle is chosen. Suppose, in the diagram, X 40 . The other possible value would be X 320 . But only the cosines of the angles will be used, and the following is an identity. cos cos ( 360 ) (20.12) Define X and Y . X cos X (20.13) Y cos Y (20.14) Define D NX , D NY , D FX , and D FY to be the displacements, in global coordinates, of the near and far ends of the member. Consider the displacements of the near end, in both local and global coordinates. dN D NY Y X D NX D NX d N cos X d N X (20.15) D NY d N cos Y d N Y (20.16) X D NX Y D NY d N ( X 2 Y 2 ) d N (20.17) At the far end, X DFX Y DFY d F MAE3501 - 20 - 11 (20.18) Define the following two matrices. D denotes a 4 by 1 displacement matrix containing the global displacements of the ends of a truss member. D NX D D NY D FX D FY (20.19) T denotes a 2 by 4 transformation matrix that determines the local displacements of the ends of a truss member in terms of the global displacements of the ends of a truss member. X T 0 Y 0 0 X 0 Y (20.20) Equations (20.17) and (20.18) can now be expressed as the following matrix equation. d TD (20.21) Homework Begin to analyze the truss, either by hand or by developing a computer program. Determine the joint coordinates, the length of each member, X and Y for each member, and T for each member. Do not concern yourselves with d, q, or D at the present time. MAE3501 - 20 - 12