Myosotis
There are a number of classical methods of determining beam deflection. E.g., double
integration, moment-area theorems, conjugate-beam method, and singularity functions. Any of
these classical methods will easily develop the following relationships for cantilever beams.
Signs are not a concern. Displacement will be positive in the direction it is drawn in a sketch.
Because slopes are small, the slope is equal to the rotation, measured in radian.
END
END
ML
EI
M L2
2EI
P L2
2EI
P L3
3EI
q L3
6EI
q L4
8EI
M
L
P
q
Note the simple pattern in the exponents and coefficients. Not perfect, but close.
These six relationships form the basis for myosotis. In the preface to his strength of
Materials text, J. P. den Hartog wrote “With the exception of the alphabet and the multiplication
tables, nothing has proved so useful in my professional life as these six relationships.” I agree,
and consider it extremely unfortunate that myosotis is no longer taught at colleges and
universities in this country. It is very probable that myositis is not being taught anywhere else in
this country..
As an aside, J. P. den Hartog is spinning a fairy tale. In that preface, he stated that, once
upon a time, his strength-of-materials teacher in Holland had introduced him to “the mysteries of
the celebrated Dr. Myosotis, whose formulas he called, in good Dutch, vergeet-mij-nietjes.” “Dr.
Myosotis” is not found in any encyclopedia. “Myosotis” is found in every encyclopedia.
MAE3501 - 22 - 1
Cantilever Beams
Use these six relationships to determine the deflection and slope at any point on a
cantilever beam. The best way to teach myosotis is to work examples.
Example
P
a
b
X
Myosotis will determine the rotation and deflection at the end of the beam directly.
END
P (a b ) 2
2EI
(E.1)
P (a b ) 3
3EI
(E.2)
END
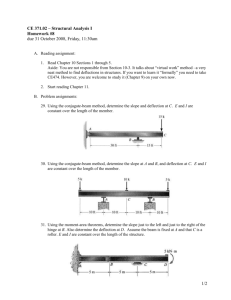
Determine the slope and displacement at X = a. Denote these deflections by A and A.
We will analyze multiple sections of cantilever beams. I denote the sections with A, B, C, etc.
These letters have nothing whatsoever to do with a, b, c, used to denote dimensions. Draw a
cantilever beam extending to X = a, and include all the forces and moments acting at the end of
this beam. If there were a uniform distributed force acting on the beam, it would be included.
P
a
Pb
This cantilever beam has no idea what is happening past its end. It only knows what
shear force and bending moment are acting at its end. Therefore, the rotation and deflection at
its end can immediately be determined.
A
P a 2 ( P b) a
2EI
EI
(E.3)
A
P a 3 (P b) a 2
3EI
2EI
(E.4)
This is a key concept. Determine the deflection and slope at some point inside a load or
loads by moving the loads in to that point, and including the moments of those loads.
MAE3501 - 22 - 2
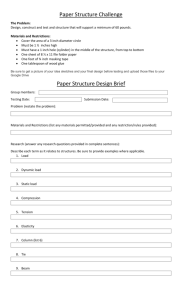
Example
This problem involves two regions. Two-region beams require some effort using any of
the classical methods.
q0
a
b
X
Determine A and A . Draw a cantilever beam extending to X = a.
q0 b
a
q0 b2
2
A
A
q0 b2
a
2
2
(q b ) a
0
2EI
EI
q0 b2 2
a
3
2
(q b ) a
0
3EI
2EI
Return to this example in a few minutes and determine END and END .
MAE3501 - 22 - 3
(E.1)
(E.2)
Example
Determine END and END .
P
a
b
Draw a schematic of the deflected shape.
a
b
A
A
END
b A
Determine A and A
A
P a2
2EI
(E.1)
P a3
3EI
(E.2)
A
Determine END and END .
END A
(E.3)
END A b A
(E.4)
This is another key concept. To determine the slope and deflection at some point outside
a load, determine the slope and deflection at the load and use geometry.
MAE3501 - 22 - 4
Return to the previous example. Draw a schematic of the deflected shape.
a
b
A
A
END
b A
B
A and A have already been determined. If the portion of the beam outside X = a were
straight, then the following relationships would be valid.
END A
(E.3)
END A b A
(E.4)
But that portion of the beam is not straight. It is a cantilever beam of length b, with a
uniform distributed force W0 . Denote the rotation and displacement at the end of that cantilever
beam by B and B .
W0
b
q0 b3
B
6EI
(E.5)
q0 b4
8EI
Determine the rotation and deflection at the end of the original cantilever beam.
B
(E.6)
END A B
(E.7)
END A b A B
(E.8)
The schematic of the deflected shape is greatly exaggerated. B is essentially
perpendicular to the horizontal axis. Adding B as though it were vertical is exactly the same
approximation as setting the denominator equal to 1 in the differential equation for beam
displacement. Myosotis yields exactly the same results as classical beam theory.
MAE3501 - 22 - 5
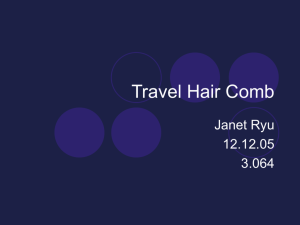
It is now possible to analyze a complicated cantilever beam.
Example
This beam has three regions and would require hours to solve using any of the classical
methods.
P
q0
a
b
c
Examine the first region.
q0 b P
a
q0 b2
P (b c )
2
Determine A and A .
A
A
q0 b2
P (b c ) a
(q b P ) a 2 2
0
2EI
EI
q0 b2
P (b c ) a 2
(q b P ) a 3 2
0
3EI
2EI
MAE3501 - 22 - 6
(E.1)
(E.2)
Examine the second region.
q0
P
b
Pc
Determine B and B .
B
P b 2 ( P c) b q 0 b 3
2EI
EI
6EI
P b 3 ( P c) b 2 q 0 b 4
B
3EI
2EI
8EI
(E.3)
(E.4)
Examine the third region.
P
c
Determine C and C .
C
P c2
2EI
(E.5)
C
P c3
3EI
(E.6)
MAE3501 - 22 - 7
Combine the results in the following manner. A subscript of 1 denotes the left edge of the
distributed load. A subscript of 2 denotes the right end of the distributed load. A subscript of 3
denotes the end of the cantilever beam.
1 A
1 A
2 1 B
2 1 b 1 B
3 2 C
3 2 c 2 C
In order to determine the deflection and slope at the end of an additional region on the
beam, perform the following two calculations. Determine the slope by adding two terms: the
slope at the end of the previous region, and the slope at the end of the additional region.
Determine a new deflection by adding three terms: the deflection at the end of the previous
region, the product of the slope at the end of the previous region and the length of the additional
region, and the deflection at the end of the additional region.
MAE3501 - 22 - 8
Example
Re-work the previous example using numerical values.
a 40 inch, b 50 inch, c 60 inch, P 9 kip
kip
W0 0.15
, E I 1.0 (10) 7 kip inch 2
inch
0.15
40
50
Examine the first region.
40
9
60
0.15 (50) 9 16.5
0.15 (50) 2
9 (50 60) 1,180
2
Determine A and A .
16.5 (40) 2 1,180 (40)
A
0.00604
2 (10) 7
(10) 7
A
16.5 (40) 3 1,180 (40) 2
0.130 inch
3 (10) 7
2 (10) 7
MAE3501 - 22 - 9
(E.1)
(E.2)
Examine the second region.
0.15
9
9 (60) 540
50
Determine B and B .
B
B
9 (50) 2
2 (10) 7
9 (50) 3
3 (10) 7
540 (50)
(10) 7
540 (50) 2
2 (10) 7
0.15 (50) 3
6 (10) 7
0.00414
0.15 (50) 4
8 (10) 7
0.117 inch
(E.3)
(E.4)
Examine the third region.
9
60
Determine C and C .
C
C
9 (60) 2
2 (10) 7
9 (60) 3
3 (10) 7
0.00162
(E.5)
0.0648 inch
(E.6)
MAE3501 - 22 - 10
Combine the results in the following manner. A subscript of 1 denotes the left edge of the
distributed load. A subscript of 2 denotes the right end of the distributed load. A subscript of 3
denotes the end of the cantilever beam.
1 0.00604
1 0.130 inch
2 0.00604 0.00414 0.0102
2 0.130 50 (0.00604) 0.117 0.549 inch
3 0.0102 0.00162 0.0118
3 0.549 60 (0.0102) 0.0648 1.23 inch
Homework
Again, read the next lesson plan carefully.
a 40 inch, b 50 inch, P 9 kip, Q 5 kip, q 0 0.15
kip
, E I 5.0 (10) 6 kip inch2 .
inch
1. Use myosotis to determine the slope, positive clockwise, and deflection, positive
down, under each concentrated force.
P
Q
a
b
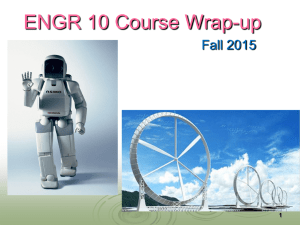
2. Use myosotis to determine the slope, positive clockwise, and deflection, positive
down, under the concentrated force and at the free end of the beam.
q0
a
P
b
MAE3501 - 22 - 11
 0
0