Overview of the Mathematics of Compressive Sensing Simon Foucart
advertisement

Overview of the
Mathematics of Compressive Sensing
Simon Foucart
Reading Seminar on
“Compressive Sensing, Extensions, and Applications”
Texas A&M University
1 October 2015
Part 1: Invitation to Compressive Sensing
Keywords
Keywords
I
Sparsity
Essential
Keywords
I
Sparsity
Essential
I
Randomness
Nothing better so far
(measurement process)
Keywords
I
Sparsity
Essential
I
Randomness
Nothing better so far
(measurement process)
I
Optimization
Preferred, but competitive alternatives are available
(reconstruction process)
The Standard Compressive Sensing Problem
The Standard Compressive Sensing Problem
x : unknown signal of interest in KN
The Standard Compressive Sensing Problem
x : unknown signal of interest in KN
y : measurement vector in Km
The Standard Compressive Sensing Problem
x : unknown signal of interest in KN
y : measurement vector in Km with m N,
The Standard Compressive Sensing Problem
x : unknown signal of interest in KN
y : measurement vector in Km with m N,
s : sparsity of x
The Standard Compressive Sensing Problem
x : unknown signal of interest in KN
y : measurement vector in Km with m N,
s : sparsity of x = card j ∈ {1, . . . , N} : xj 6= 0 .
The Standard Compressive Sensing Problem
x : unknown signal of interest in KN
y : measurement vector in Km with m N,
s : sparsity of x = card j ∈ {1, . . . , N} : xj 6= 0 .
Find concrete sensing/recovery protocols,
The Standard Compressive Sensing Problem
x : unknown signal of interest in KN
y : measurement vector in Km with m N,
s : sparsity of x = card j ∈ {1, . . . , N} : xj 6= 0 .
Find concrete sensing/recovery protocols, i.e., find
I
measurement matrices A : x ∈ KN 7→ y ∈ Km
The Standard Compressive Sensing Problem
x : unknown signal of interest in KN
y : measurement vector in Km with m N,
s : sparsity of x = card j ∈ {1, . . . , N} : xj 6= 0 .
Find concrete sensing/recovery protocols, i.e., find
I
I
measurement matrices A : x ∈ KN →
7 y ∈ Km
reconstruction maps ∆ : y ∈ Km →
7 x ∈ KN
The Standard Compressive Sensing Problem
x : unknown signal of interest in KN
y : measurement vector in Km with m N,
s : sparsity of x = card j ∈ {1, . . . , N} : xj 6= 0 .
Find concrete sensing/recovery protocols, i.e., find
I
I
measurement matrices A : x ∈ KN →
7 y ∈ Km
reconstruction maps ∆ : y ∈ Km →
7 x ∈ KN
such that
∆(Ax) = x
for any s-sparse vector x ∈ KN .
The Standard Compressive Sensing Problem
x : unknown signal of interest in KN
y : measurement vector in Km with m N,
s : sparsity of x = card j ∈ {1, . . . , N} : xj 6= 0 .
Find concrete sensing/recovery protocols, i.e., find
I
I
measurement matrices A : x ∈ KN →
7 y ∈ Km
reconstruction maps ∆ : y ∈ Km →
7 x ∈ KN
such that
∆(Ax) = x
for any s-sparse vector x ∈ KN .
In realistic situations, two issues to consider:
The Standard Compressive Sensing Problem
x : unknown signal of interest in KN
y : measurement vector in Km with m N,
s : sparsity of x = card j ∈ {1, . . . , N} : xj 6= 0 .
Find concrete sensing/recovery protocols, i.e., find
I
I
measurement matrices A : x ∈ KN →
7 y ∈ Km
reconstruction maps ∆ : y ∈ Km →
7 x ∈ KN
such that
∆(Ax) = x
for any s-sparse vector x ∈ KN .
In realistic situations, two issues to consider:
Stability:
x not sparse but compressible,
Robustness:
measurement error in y = Ax + e.
A Selection of Applications
A Selection of Applications
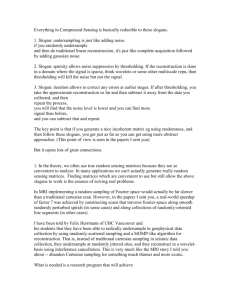
I
Magnetic resonance imaging
Figure: Left: traditional MRI reconstruction; Right: compressive
sensing reconstruction (courtesy of M. Lustig and S. Vasanawala)
A Selection of Applications
I
Magnetic resonance imaging
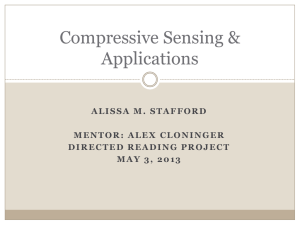
I
Sampling theory
8
6
4
2
0
ï2
ï4
ï6
ï0.5
ï0.4
ï0.3
ï0.2
ï0.1
0
0.1
0.2
Figure: Time-domain signal with 16 samples.
0.3
0.4
0.5
A Selection of Applications
I
Magnetic resonance imaging
I
Sampling theory
I
Error correction
A Selection of Applications
I
Magnetic resonance imaging
I
Sampling theory
I
Error correction
I
and many more...
Application in Metagenomics
[Koslicki–F.–Rosen]
Application in Metagenomics
I
[Koslicki–F.–Rosen]
x ∈ RN (N = 273, 727): concentrations of known bacteria in
a given environmental sample.
Application in Metagenomics
I
[Koslicki–F.–Rosen]
x ∈ RN (N = 273, 727): concentrations of known bacteria in
a given environmental sample. Sparsity assumption is realistic.
Application in Metagenomics
I
[Koslicki–F.–Rosen]
x ∈ RN (N = 273, 727): concentrations of known bacteria in
a given environmental sample.
P Sparsity assumption is realistic.
Note also that x ≥ 0 and j xj = 1.
Application in Metagenomics
[Koslicki–F.–Rosen]
I
x ∈ RN (N = 273, 727): concentrations of known bacteria in
a given environmental sample.
P Sparsity assumption is realistic.
Note also that x ≥ 0 and j xj = 1.
I
y ∈ Rm (m = 46 = 4, 096): frequencies of length-6 subwords
(in 16S rRNA gene reads or in whole-genome shotgun reads)
Application in Metagenomics
[Koslicki–F.–Rosen]
I
x ∈ RN (N = 273, 727): concentrations of known bacteria in
a given environmental sample.
P Sparsity assumption is realistic.
Note also that x ≥ 0 and j xj = 1.
I
y ∈ Rm (m = 46 = 4, 096): frequencies of length-6 subwords
(in 16S rRNA gene reads or in whole-genome shotgun reads)
I
A ∈ Rm×N : frequencies of length-6 subwords in all known
(i.e., sequenced) bacteria.
Application in Metagenomics
[Koslicki–F.–Rosen]
I
x ∈ RN (N = 273, 727): concentrations of known bacteria in
a given environmental sample.
P Sparsity assumption is realistic.
Note also that x ≥ 0 and j xj = 1.
I
y ∈ Rm (m = 46 = 4, 096): frequencies of length-6 subwords
(in 16S rRNA gene reads or in whole-genome shotgun reads)
I
A ∈ Rm×N : frequencies of length-6 subwords in all known
(i.e., sequenced) bacteria. It is a frequency matrix, that is,
Application in Metagenomics
[Koslicki–F.–Rosen]
I
x ∈ RN (N = 273, 727): concentrations of known bacteria in
a given environmental sample.
P Sparsity assumption is realistic.
Note also that x ≥ 0 and j xj = 1.
I
y ∈ Rm (m = 46 = 4, 096): frequencies of length-6 subwords
(in 16S rRNA gene reads or in whole-genome shotgun reads)
I
A ∈ Rm×N : frequencies of length-6 subwords in all known
(i.e., sequenced) bacteria. It is a frequency matrix, that is,
Pm
Ai,j ≥ 0
and
i=1 Ai,j = 1.
Application in Metagenomics
[Koslicki–F.–Rosen]
I
x ∈ RN (N = 273, 727): concentrations of known bacteria in
a given environmental sample.
P Sparsity assumption is realistic.
Note also that x ≥ 0 and j xj = 1.
I
y ∈ Rm (m = 46 = 4, 096): frequencies of length-6 subwords
(in 16S rRNA gene reads or in whole-genome shotgun reads)
I
A ∈ Rm×N : frequencies of length-6 subwords in all known
(i.e., sequenced) bacteria. It is a frequency matrix, that is,
Pm
Ai,j ≥ 0
and
i=1 Ai,j = 1.
I
Quikr improves on traditional read-by-read methods,
especially in terms of speed.
Application in Metagenomics
[Koslicki–F.–Rosen]
I
x ∈ RN (N = 273, 727): concentrations of known bacteria in
a given environmental sample.
P Sparsity assumption is realistic.
Note also that x ≥ 0 and j xj = 1.
I
y ∈ Rm (m = 46 = 4, 096): frequencies of length-6 subwords
(in 16S rRNA gene reads or in whole-genome shotgun reads)
I
A ∈ Rm×N : frequencies of length-6 subwords in all known
(i.e., sequenced) bacteria. It is a frequency matrix, that is,
Pm
Ai,j ≥ 0
and
i=1 Ai,j = 1.
I
Quikr improves on traditional read-by-read methods,
especially in terms of speed.
I
Codes available at
sourceforge.net/projects/quikr/
sourceforge.net/projects/wgsquikr/
`0 -Minimization
Since
kxkpp :=
N
X
j=1
|xj |p −→
p→0
N
X
j=1
1{xj 6=0} ,
`0 -Minimization
Since
kxkpp :=
N
X
j=1
|xj |p −→
p→0
N
X
1{xj 6=0} ,
j=1
the notation kxk0 [sic] has become usual for
kxk0 := card(supp(x)),
where supp(x) := {j ∈ [N] : xj 6= 0}.
`0 -Minimization
Since
kxkpp :=
N
X
j=1
|xj |p −→
p→0
N
X
1{xj 6=0} ,
j=1
the notation kxk0 [sic] has become usual for
kxk0 := card(supp(x)),
where supp(x) := {j ∈ [N] : xj 6= 0}.
For an s-sparse x ∈ KN , observe the equivalence of
`0 -Minimization
Since
kxkpp :=
N
X
j=1
|xj |p −→
p→0
N
X
1{xj 6=0} ,
j=1
the notation kxk0 [sic] has become usual for
kxk0 := card(supp(x)),
where supp(x) := {j ∈ [N] : xj 6= 0}.
For an s-sparse x ∈ KN , observe the equivalence of
I
x is the unique s-sparse solution of Az = y with y = Ax,
`0 -Minimization
Since
kxkpp :=
N
X
|xj |p −→
j=1
p→0
N
X
1{xj 6=0} ,
j=1
the notation kxk0 [sic] has become usual for
kxk0 := card(supp(x)),
where supp(x) := {j ∈ [N] : xj 6= 0}.
For an s-sparse x ∈ KN , observe the equivalence of
I
x is the unique s-sparse solution of Az = y with y = Ax,
I
x can be reconstructed as the unique solution of
(P0 )
minimize kzk0
z∈KN
subject to Az = y.
`0 -Minimization
Since
kxkpp :=
N
X
|xj |p −→
j=1
p→0
N
X
1{xj 6=0} ,
j=1
the notation kxk0 [sic] has become usual for
kxk0 := card(supp(x)),
where supp(x) := {j ∈ [N] : xj 6= 0}.
For an s-sparse x ∈ KN , observe the equivalence of
I
x is the unique s-sparse solution of Az = y with y = Ax,
I
x can be reconstructed as the unique solution of
(P0 )
minimize kzk0
z∈KN
subject to Az = y.
This is a combinatorial problem, NP-hard in general.
Minimal Number of Measurements
Minimal Number of Measurements
Given A ∈ Km×N , the following are equivalent:
Minimal Number of Measurements
Given A ∈ Km×N , the following are equivalent:
1. Every s-sparse x is the unique s-sparse solution of Az = Ax,
Minimal Number of Measurements
Given A ∈ Km×N , the following are equivalent:
1. Every s-sparse x is the unique s-sparse solution of Az = Ax,
2. ker A ∩ {z ∈ KN : kzk0 ≤ 2s} = {0},
Minimal Number of Measurements
Given A ∈ Km×N , the following are equivalent:
1. Every s-sparse x is the unique s-sparse solution of Az = Ax,
2. ker A ∩ {z ∈ KN : kzk0 ≤ 2s} = {0},
3. For any S ⊂ [N] with card(S) ≤ 2s, the matrix AS is injective,
Minimal Number of Measurements
Given A ∈ Km×N , the following are equivalent:
1. Every s-sparse x is the unique s-sparse solution of Az = Ax,
2. ker A ∩ {z ∈ KN : kzk0 ≤ 2s} = {0},
3. For any S ⊂ [N] with card(S) ≤ 2s, the matrix AS is injective,
4. Every set of 2s columns of A is linearly independent.
Minimal Number of Measurements
Given A ∈ Km×N , the following are equivalent:
1. Every s-sparse x is the unique s-sparse solution of Az = Ax,
2. ker A ∩ {z ∈ KN : kzk0 ≤ 2s} = {0},
3. For any S ⊂ [N] with card(S) ≤ 2s, the matrix AS is injective,
4. Every set of 2s columns of A is linearly independent.
As a consequence, exact recovery of every s-sparse vector forces
m ≥ 2s.
Minimal Number of Measurements
Given A ∈ Km×N , the following are equivalent:
1. Every s-sparse x is the unique s-sparse solution of Az = Ax,
2. ker A ∩ {z ∈ KN : kzk0 ≤ 2s} = {0},
3. For any S ⊂ [N] with card(S) ≤ 2s, the matrix AS is injective,
4. Every set of 2s columns of A is linearly independent.
As a consequence, exact recovery of every s-sparse vector forces
m ≥ 2s.
This can be achieved using partial Vandermonde matrices.
Exact s-Sparse Recovery from 2s Fourier Measurements
Exact s-Sparse Recovery from 2s Fourier Measurements
Identify an s-sparse x ∈ CN with a function x on {0, 1, . . . , N − 1}
with support S, card(S) = s.
Exact s-Sparse Recovery from 2s Fourier Measurements
Identify an s-sparse x ∈ CN with a function x on {0, 1, . . . , N − 1}
with support S, card(S) = s. Consider the 2s Fourier coefficients
x̂(j) =
N−1
X
k=0
x(k)e −i2πjk/N ,
0 ≤ j ≤ 2s − 1.
Exact s-Sparse Recovery from 2s Fourier Measurements
Identify an s-sparse x ∈ CN with a function x on {0, 1, . . . , N − 1}
with support S, card(S) = s. Consider the 2s Fourier coefficients
x̂(j) =
N−1
X
x(k)e −i2πjk/N ,
0 ≤ j ≤ 2s − 1.
k=0
Consider a trigonometric polynomial vanishing exactly on S, i.e.,
Y
p(t) :=
1 − e −i2πk/N e i2πt/N .
k∈S
Exact s-Sparse Recovery from 2s Fourier Measurements
Identify an s-sparse x ∈ CN with a function x on {0, 1, . . . , N − 1}
with support S, card(S) = s. Consider the 2s Fourier coefficients
x̂(j) =
N−1
X
x(k)e −i2πjk/N ,
0 ≤ j ≤ 2s − 1.
k=0
Consider a trigonometric polynomial vanishing exactly on S, i.e.,
Y
p(t) :=
1 − e −i2πk/N e i2πt/N .
k∈S
Since p · x ≡ 0, discrete convolution gives
0 = (p̂ ∗ x̂)(j) =
N−1
X
k=0
p̂(k)x̂(j − k),
0 ≤ j ≤ N − 1.
Exact s-Sparse Recovery from 2s Fourier Measurements
Identify an s-sparse x ∈ CN with a function x on {0, 1, . . . , N − 1}
with support S, card(S) = s. Consider the 2s Fourier coefficients
x̂(j) =
N−1
X
x(k)e −i2πjk/N ,
0 ≤ j ≤ 2s − 1.
k=0
Consider a trigonometric polynomial vanishing exactly on S, i.e.,
Y
p(t) :=
1 − e −i2πk/N e i2πt/N .
k∈S
Since p · x ≡ 0, discrete convolution gives
0 = (p̂ ∗ x̂)(j) =
N−1
X
p̂(k)x̂(j − k),
0 ≤ j ≤ N − 1.
k=0
Note that p̂(0) = 1 and that p̂(k) = 0 for k > s.
Exact s-Sparse Recovery from 2s Fourier Measurements
Identify an s-sparse x ∈ CN with a function x on {0, 1, . . . , N − 1}
with support S, card(S) = s. Consider the 2s Fourier coefficients
x̂(j) =
N−1
X
x(k)e −i2πjk/N ,
0 ≤ j ≤ 2s − 1.
k=0
Consider a trigonometric polynomial vanishing exactly on S, i.e.,
Y
p(t) :=
1 − e −i2πk/N e i2πt/N .
k∈S
Since p · x ≡ 0, discrete convolution gives
0 = (p̂ ∗ x̂)(j) =
N−1
X
p̂(k)x̂(j − k),
0 ≤ j ≤ N − 1.
k=0
Note that p̂(0) = 1 and that p̂(k) = 0 for k > s. The equations
s, . . . , 2s − 1 translate into a Toeplitz system with unknowns
p̂(1), . . . , p̂(s).
Exact s-Sparse Recovery from 2s Fourier Measurements
Identify an s-sparse x ∈ CN with a function x on {0, 1, . . . , N − 1}
with support S, card(S) = s. Consider the 2s Fourier coefficients
x̂(j) =
N−1
X
x(k)e −i2πjk/N ,
0 ≤ j ≤ 2s − 1.
k=0
Consider a trigonometric polynomial vanishing exactly on S, i.e.,
Y
p(t) :=
1 − e −i2πk/N e i2πt/N .
k∈S
Since p · x ≡ 0, discrete convolution gives
0 = (p̂ ∗ x̂)(j) =
N−1
X
p̂(k)x̂(j − k),
0 ≤ j ≤ N − 1.
k=0
Note that p̂(0) = 1 and that p̂(k) = 0 for k > s. The equations
s, . . . , 2s − 1 translate into a Toeplitz system with unknowns
p̂(1), . . . , p̂(s). This determines p̂, hence p, then S, and finally x.
`1 -Minimization (Basis Pursuit)
`1 -Minimization (Basis Pursuit)
Replace (P0 ) by
(P1 )
minimize kzk1
z∈KN
subject to Az = y.
`1 -Minimization (Basis Pursuit)
Replace (P0 ) by
(P1 )
I
minimize kzk1
z∈KN
Geometric intuition
subject to Az = y.
`1 -Minimization (Basis Pursuit)
Replace (P0 ) by
(P1 )
minimize kzk1
z∈KN
subject to Az = y.
I
Geometric intuition
I
Unique `1 -minimizers are at most m-sparse (when K = R)
`1 -Minimization (Basis Pursuit)
Replace (P0 ) by
(P1 )
minimize kzk1
z∈KN
subject to Az = y.
I
Geometric intuition
I
Unique `1 -minimizers are at most m-sparse (when K = R)
I
Convex optimization program, hence solvable in practice
`1 -Minimization (Basis Pursuit)
Replace (P0 ) by
minimize kzk1
(P1 )
z∈KN
subject to Az = y.
I
Geometric intuition
I
Unique `1 -minimizers are at most m-sparse (when K = R)
I
Convex optimization program, hence solvable in practice
I
In the real setting, recast as the linear optimization program
minimize
c,z∈RN
N
X
j=1
cj
subject to Az = y and − cj ≤ zj ≤ cj .
`1 -Minimization (Basis Pursuit)
Replace (P0 ) by
minimize kzk1
(P1 )
z∈KN
subject to Az = y.
I
Geometric intuition
I
Unique `1 -minimizers are at most m-sparse (when K = R)
I
Convex optimization program, hence solvable in practice
I
In the real setting, recast as the linear optimization program
minimize
c,z∈RN
I
N
X
cj
subject to Az = y and − cj ≤ zj ≤ cj .
j=1
In the complex setting, recast as a second order cone program
Basis Pursuit — Null Space Property
Basis Pursuit — Null Space Property
∆1 (Ax) = x for every vector x supported on S if and only if
Basis Pursuit — Null Space Property
∆1 (Ax) = x for every vector x supported on S if and only if
(NSP)
kuS k1 < kuS k1 ,
all u ∈ ker A \ {0}.
Basis Pursuit — Null Space Property
∆1 (Ax) = x for every vector x supported on S if and only if
(NSP)
kuS k1 < kuS k1 ,
For real measurement matrices,
all u ∈ ker A \ {0}.
Basis Pursuit — Null Space Property
∆1 (Ax) = x for every vector x supported on S if and only if
(NSP)
kuS k1 < kuS k1 ,
all u ∈ ker A \ {0}.
For real measurement matrices, real and complex NSPs read
Basis Pursuit — Null Space Property
∆1 (Ax) = x for every vector x supported on S if and only if
kuS k1 < kuS k1 ,
(NSP)
all u ∈ ker A \ {0}.
For real measurement matrices, real and complex NSPs read
X
X
|uj | <
|u` |,
all u ∈ kerR A \ {0},
j∈S
`∈S
Basis Pursuit — Null Space Property
∆1 (Ax) = x for every vector x supported on S if and only if
kuS k1 < kuS k1 ,
(NSP)
all u ∈ ker A \ {0}.
For real measurement matrices, real and complex NSPs read
X
X
|uj | <
|u` |,
all u ∈ kerR A \ {0},
j∈S
`∈S
Xq
Xq
2
2
vj + wj <
v`2 + w`2 ,
j∈S
`∈S
all (v, w) ∈ (kerR A)2 \ {0}.
Basis Pursuit — Null Space Property
∆1 (Ax) = x for every vector x supported on S if and only if
kuS k1 < kuS k1 ,
(NSP)
all u ∈ ker A \ {0}.
For real measurement matrices, real and complex NSPs read
X
X
|uj | <
|u` |,
all u ∈ kerR A \ {0},
j∈S
`∈S
Xq
Xq
2
2
vj + wj <
v`2 + w`2 ,
j∈S
all (v, w) ∈ (kerR A)2 \ {0}.
`∈S
Real and complex NSPs are in fact equivalent.
Orthogonal Matching Pursuit
Orthogonal Matching Pursuit
Starting with S 0 = ∅ and x0 = 0, iterate
(OMP1 ) S n+1 = S n ∪ j n+1 := argmax |(A∗ (y − Axn ))j | ,
j∈[N]
(OMP2 )
n+1
x
= argmin ky − Azk2 , supp(z) ⊆ S n+1 .
z∈CN
Orthogonal Matching Pursuit
Starting with S 0 = ∅ and x0 = 0, iterate
(OMP1 ) S n+1 = S n ∪ j n+1 := argmax |(A∗ (y − Axn ))j | ,
j∈[N]
(OMP2 )
n+1
x
= argmin ky − Azk2 , supp(z) ⊆ S n+1 .
z∈CN
I
The norm of the residual decreases according to
2
ky − Axn+1 k22 ≤ ky − Axn k22 − (A∗ (y − Axn ))j n+1 .
Orthogonal Matching Pursuit
Starting with S 0 = ∅ and x0 = 0, iterate
(OMP1 ) S n+1 = S n ∪ j n+1 := argmax |(A∗ (y − Axn ))j | ,
j∈[N]
(OMP2 )
n+1
x
= argmin ky − Azk2 , supp(z) ⊆ S n+1 .
z∈CN
I
The norm of the residual decreases according to
2
ky − Axn+1 k22 ≤ ky − Axn k22 − (A∗ (y − Axn ))j n+1 .
I
Every vector x6=0 supported on S, card(S) = s, is recovered
from y = Ax after at most s iterations of OMP if and only if
AS is injective and
max |(A∗ r)j | > max |(A∗ r)` |
(ERC)
j∈S
`∈S
for all r6=0 ∈ Az, supp(z) ⊆ S .
Iterative Hard Thresholding and Hard Thresholding Pursuit
Iterative Hard Thresholding and Hard Thresholding Pursuit
I
solving the rectangular system Ax = y amounts to solving the
square system A∗ Ax = A∗ y,
Iterative Hard Thresholding and Hard Thresholding Pursuit
I
I
solving the rectangular system Ax = y amounts to solving the
square system A∗ Ax = A∗ y,
classical iterative methods suggest the iteration
xn+1 = xn + A∗ (y − Axn ),
Iterative Hard Thresholding and Hard Thresholding Pursuit
I
I
I
solving the rectangular system Ax = y amounts to solving the
square system A∗ Ax = A∗ y,
classical iterative methods suggest the iteration
xn+1 = xn + A∗ (y − Axn ),
at each iteration, keep s largest absolute entries and set the
other ones to zero.
Iterative Hard Thresholding and Hard Thresholding Pursuit
I
I
I
solving the rectangular system Ax = y amounts to solving the
square system A∗ Ax = A∗ y,
classical iterative methods suggest the iteration
xn+1 = xn + A∗ (y − Axn ),
at each iteration, keep s largest absolute entries and set the
other ones to zero.
IHT: Start with an s-sparse x0 ∈ CN and iterate:
(IHT)
xn+1 = Hs (xn + A∗ (y − Axn ))
until a stopping criterion is met.
Iterative Hard Thresholding and Hard Thresholding Pursuit
I
I
I
solving the rectangular system Ax = y amounts to solving the
square system A∗ Ax = A∗ y,
classical iterative methods suggest the iteration
xn+1 = xn + A∗ (y − Axn ),
at each iteration, keep s largest absolute entries and set the
other ones to zero.
IHT: Start with an s-sparse x0 ∈ CN and iterate:
(IHT)
xn+1 = Hs (xn + A∗ (y − Axn ))
until a stopping criterion is met.
HTP: Start with an s-sparse x0 ∈ CN and iterate:
Iterative Hard Thresholding and Hard Thresholding Pursuit
I
I
I
solving the rectangular system Ax = y amounts to solving the
square system A∗ Ax = A∗ y,
classical iterative methods suggest the iteration
xn+1 = xn + A∗ (y − Axn ),
at each iteration, keep s largest absolute entries and set the
other ones to zero.
IHT: Start with an s-sparse x0 ∈ CN and iterate:
(IHT)
xn+1 = Hs (xn + A∗ (y − Axn ))
until a stopping criterion is met.
HTP: Start with an s-sparse x0 ∈ CN and iterate:
(HTP1 )
(HTP2 )
Iterative Hard Thresholding and Hard Thresholding Pursuit
I
I
I
solving the rectangular system Ax = y amounts to solving the
square system A∗ Ax = A∗ y,
classical iterative methods suggest the iteration
xn+1 = xn + A∗ (y − Axn ),
at each iteration, keep s largest absolute entries and set the
other ones to zero.
IHT: Start with an s-sparse x0 ∈ CN and iterate:
(IHT)
xn+1 = Hs (xn + A∗ (y − Axn ))
until a stopping criterion is met.
HTP: Start with an s-sparse x0 ∈ CN and iterate:
(HTP1 ) S n+1 = s largest abs. entries of xn + A∗ (y − Axn ) ,
(HTP2 )
Iterative Hard Thresholding and Hard Thresholding Pursuit
I
I
I
solving the rectangular system Ax = y amounts to solving the
square system A∗ Ax = A∗ y,
classical iterative methods suggest the iteration
xn+1 = xn + A∗ (y − Axn ),
at each iteration, keep s largest absolute entries and set the
other ones to zero.
IHT: Start with an s-sparse x0 ∈ CN and iterate:
(IHT)
xn+1 = Hs (xn + A∗ (y − Axn ))
until a stopping criterion is met.
HTP: Start with an s-sparse x0 ∈ CN and iterate:
(HTP1 ) S n+1 = s largest abs. entries of xn + A∗ (y − Axn ) ,
(HTP2 ) xn+1 = argmin ky − Azk2 , supp(z) ⊆ S n+1 ,
Iterative Hard Thresholding and Hard Thresholding Pursuit
I
I
I
solving the rectangular system Ax = y amounts to solving the
square system A∗ Ax = A∗ y,
classical iterative methods suggest the iteration
xn+1 = xn + A∗ (y − Axn ),
at each iteration, keep s largest absolute entries and set the
other ones to zero.
IHT: Start with an s-sparse x0 ∈ CN and iterate:
(IHT)
xn+1 = Hs (xn + A∗ (y − Axn ))
until a stopping criterion is met.
HTP: Start with an s-sparse x0 ∈ CN and iterate:
(HTP1 ) S n+1 = s largest abs. entries of xn + A∗ (y − Axn ) ,
(HTP2 ) xn+1 = argmin ky − Azk2 , supp(z) ⊆ S n+1 ,
until a stopping criterion is met (S n+1 = S n is natural here).