On some quadratic Hamilton-Poisson systems
advertisement

On some quadratic Hamilton-Poisson systems
R. M. Adams, R. Biggs and C. C. Remsing
Abstract. We identify a class of quadratic Hamilton-Poisson systems
on the three-dimensional Euclidean Lie-Poisson space. Specifically, we
consider systems that are both homogeneous and for which the underlying
quadratic form is positive semidefinite. Any such system is shown to be
equivalent to one of four normal forms (of which two are parametrized
families of systems). For the cases with non-trivial dynamics, the stability
nature of the equilibrium states is fully investigated. Furthermore, we
find explicit expressions for the integral curves (in terms of Jacobi elliptic
functions).
M.S.C. 2010: 53D17, 37J25, 37J35, 22E60.
Key words: Hamilton-Poisson system; Lie-Poisson structure; energy-Casimir method;
Jacobi elliptic function; invariant optimal control problem.
1
Introduction
The dual space g∗ of a Lie algebra g has a natural Poisson structure, the (minus) LiePoisson structure of g∗ ; this Poisson space is denoted by g∗− . A quadratic HamiltonPoisson system on g∗− is given by HA,Q = p(A) + Q(p). Here A ∈ g and Q is a
quadratic form on g∗ . Such Hamilton-Poisson systems have been studied in the last
few decades (see, e.g., [5, 6, 10, 7, 25, 26, 9, 11]).
In this paper we consider only quadratic Hamilton-Poisson systems on the Euclidean Lie-Poisson space se (2)∗− . Moreover, we shall restrict to systems that are
both homogeneous (i.e., A = 0) and for which the quadratic form Q is positive
semidefinite. We show that any such system is equivalent to one of the systems
H0 (p) = 0
¡
¢
H2,α (p) = 12 p22 + α p23
H1 (p) =
H3,α (p) =
1
2
1
2
p21
α p23
for some α > 0. H0 and H1 have almost trivial dynamics and so we shall omit
any discussion of these systems. The stability nature of all equilibrium states of
~ 2,α and H
~ 3,α is investigated by the energy-Casimir
(the Hamiltonian vector fields) H
method. Furthermore, explicit expressions for the integral curves of these vector fields
are found in terms of Jacobi elliptic functions.
Applied Sciences, Vol.15, 2013, pp.
1-12.
c Balkan Society of Geometers, Geometry Balkan Press 2013.
°
2
R. M. Adams, R. Biggs and C. C. Remsing
A general left-invariant control affine system on the Euclidean group SE (2) has
the form ġ = g (A + u1 B1 + · · · + u` B` ), where A, B1 , . . . , B` ∈ se (2), 1 ≤ ` ≤ 3.
(The elements B1 , . . . , B` are assumed to be linearly independent.) Specific leftinvariant optimal control problems on SE (2), associated with the above mentioned
control systems, have been studied by several authors (see, e.g., [14, 13, 24, 22, 21, 23]).
One can associate to drift-free systems the following class of optimal control problems
(with quadratic cost)
ġ = g (u1 B1 + · · · + u` B` ) ,
g(0) = g0 , g(T ) = g1
g ∈ SE (2), u = (u1 , . . . , u` ) ∈ R` , 1 ≤ ` ≤ 3
(1.1)
Z T
J =1
u(t)> Q u(t) dt → min .
2
0
Here Q is an ` × ` positive definite matrix. Each of these problems is lifted, via the
Pontryagin Maximum Principle (cf. [3, 14]), to a homogeneous (positive semidefinite)
quadratic Hamilton-Poisson system on se (2)∗− . The extremal controls can then be
found in terms of integral curves of the associated Hamiltonian vector field. HamiltonPoisson systems corresponding to lifted optimal control problems on SE (2) have been
investigated in [1, 2].
2
2.1
Preliminaries
The Lie-Poisson structure
Let g be a (real) Lie algebra. The dual space g∗ has a natural Poisson structure,
the (minus) Lie-Poisson structure (see, e.g., [16, 17]). This structure is given by
{F, G} (p) = −p ([dF (p), dG(p)])
∗
for p ∈ g and F, G ∈ C ∞ (g∗ ). Here dF (p) is a linear function on g∗ and so is
(identified with) an element of g. A function C ∈ C ∞ (g∗ ) is a Casimir function if
{C, F } = 0 for all F ∈ C ∞ (g∗ ).
~ on
To each function H ∈ C ∞ (g∗ ) we may associate a unique vector field H
∗
~
g such that H[F ] = {F, H}. This vector field is called the Hamiltonian vector field
~ are compatible with a diffeomorphism
associated with H. Two vector fields F~ and G
∗
∗
~
~
~
φ : g → g if the push-forward φ∗ F equals G (i.e., Tp φ· F~ (p) = G(φ(p))
for p ∈ g∗ ).
The diffeomorphism φ establishes a one-to-one correspondence between the integral
~
curves of F~ and G.
A linear automorphism ψ : g∗ → g∗ is a linear Poisson automorphism if {F, G} ◦
ψ = {F ◦ ψ, G ◦ ψ} for all F, G ∈ C ∞ (g∗ ). Linear Poisson automorphisms are exactly
the dual maps of Lie algebra automorphisms. We say that two Hamilton-Poisson
systems are equivalent if the vector fields associated with them are compatible with
a linear Poisson automorphism.
Remark 2.1. Let H ∈ C ∞ (g∗ ) and let ψ be a linear Poisson automorphism. The
systems H ◦ ψ and H are equivalent as the associated vector fields are compatible
with ψ. For any Casimir function C and any function χ ∈ C ∞ (R), the vector fields
associated with H and H + χ(C), respectively, are identical. Hence the systems
H ◦ ψ and H + χ(C) are equivalent.
On some quadratic Hamilton-Poisson systems
2.2
3
The energy-Casimir method
The energy-Casimir method [12] gives sufficient conditions for Lyapunov stability of
equilibrium states of certain types of Hamilton-Poisson dynamical systems (cf. [17,
20]). The method is restricted to certain types of systems, since its implementation
relies on an abundant supply of Casimir functions.
The standard energy-Casimir method states that if ze is an equilibrium point of a
~ (associated with an energy function H) and if there exists
Hamiltonian vector field H
a Casimir function C such that ze is a critical point of H + C and d2 (H + C)(ze )
is (positive or negative) definite, then ze is Lyapunov stable.
Ortega and Ratiu have obtained a generalization of the standard energy-Casimir
method (cf. [18, 19]). This extended version states that if C = λ1 C1 + · · · + λk Ck ,
where λ1 , . . . , λk ∈ R and C1 , . . . , Ck are conserved quantities (i.e., they Poisson
commute with the energy function H), then definiteness of d2 (λ0 H + C)(ze ), λ0 ∈ R
is only required on the intersection (subspace) W = ker dH(ze ) ∩ ker dC1 (ze ) ∩ · · · ∩
ker dCk (ze ).
2.3
Jacobi elliptic functions
Given the modulus k ∈ [0, 1], the basic Jacobi elliptic functions sn(·, k), cn(·, k), and
dn (·, k) can be defined as
sn(x, k) = sin am(x, k)
cn(x, k) = cos am(x, k)
q
dn(x, k) = 1 − k 2 sin2 am(x, k)
Rϕ
where am(·, k) = F (·, k)−1 is the amplitude and F (ϕ, k) =
0
√
dt
·
1−k2 sin2 t
(For
the degenerate cases k = 0 and k = 1 we recover the circular functions and the
hyperbolic functions, respectively.) Simple elliptic integrals can be expressed in terms
of appropriate inverse (elliptic) functions. The following formulas hold true (see [4,
15]):
Z
b
dt
p
(2.1)
(a2 + t2 )(b2 − t2 )
dt
x
Z a
p
(2.2)
x
3
3.1
(a2 − t2 )(t2 − b2 )
=
√ 1
a2 +b2
=
1
a
dn−1
cn−1
³
1
a
x,
³
1
b
x,
√ b
a2 +b2
´
√
a2 −b2
,
a
´
,
b ≤ x ≤ a.
Hamilton-Poisson systems on se (2)∗−
The Lie-Poisson space se (2)∗−
The Euclidean Lie algebra is given
0
se (2) = x1
x2
by
0
0
x3
0≤x≤b
0
−x3 : x1 , x2 , x3 ∈ R .
0
4
Let
R. M. Adams, R. Biggs and C. C. Remsing
0
E1 = 1
0
0
0
0
0
0 ,
0
0 0 0
E2 = 0 0 0 ,
1 0 0
0
E3 = 0
0
0
0
1
0
−1
0
be the standard basis of se (2). Then the bracket operation is given by [E2 , E3 ] = E1 ,
[E3 , E1 ] = E2 , and [E1 , E2 ] = 0. Let (E1∗ , E2∗ , E3∗ ) denote the dual of£the standard
¤
basis. An element p = p1 E1∗ + p2 E2∗ + p3 E3∗ will be written as p = p1 p2 p3 .
The group of linear Poisson automorphisms of se (2)∗− is given by
x
y v
p 7→ p −ςy ςx w : x, y, v, w ∈ R, x2 + y 2 6= 0, ς = ±1 .
0
0 ς
Now consider a Hamiltonian H on se (2)∗− . The equations of motion take the
following form
ṗi = −p([Ei , dH(p)]), i = 1, 2, 3
or, explicitly,
∂H
p2
ṗ1 =
∂p
3
∂H
p1
ṗ2 = −
∂p3
ṗ3 = ∂H p1 − ∂H p2 ·
∂p2
∂p1
We note that C : se (2)∗ → R, C(p) = p21 + p22 is a Casimir function.
3.2
Equivalence of systems
Consider a (homogeneous) quadratic Hamilton-Poisson system HQ (p) = p Q p> ,
where Q is a positive semidefinite 3 × 3 matrix.
¢
¡
Theorem 3.1. Let H0 (p) = 0, H1 (p) = 12 p21 , H2,α (p) = 21 p22 + α p23 , and H3,α (p) =
1
2
2 α p3 . There exist a linear Poisson automorphism ψ and constants α, γ > 0 such
that
(HQ + C) ◦ ψ = H + γ C
for some H ∈ {H0 , H1 , H2,α , H3,α }.
Proof. Let
a1
Q = b1
b2
b1
a2
b3
b2
b3 .
a3
First, let us assume a3 = 0. The 2 × 2 principle minors of Q are then a1 a2 −
b21 , −b22 , and −b23 . As Q is positive semidefinite (shortly PSD), all principle minors
are nonnegative. Thus b2 = b3 = 0. Now,
1 y 0
ψ1 : p 7→ p Ψ1 ,
Ψ1 = −y 1 0
0 0 1
On some quadratic Hamilton-Poisson systems
5
is a linear Poisson automorphism for all y ∈ R. Also,
>
((HQ + C) ◦ ψ1 ) (p) = p Ψ1 (Q + C) Ψ>
1p
a01,y
b1 + y (a2 − a1 ) − y 2 b1
>
2
a02,y
Ψ1 (Q + C) Ψ1 = b1 + y (a2 − a1 ) − y b1
0
0
0
0
0
for some a01,y , a02,y ∈ R. Furthermore, b1 + y (a2 − a1 ) − y 2 b1 = 0 has a real solution
for y. Thus there exists y ∈ R such that
((HQ + C) ◦ ψ1 )(p) = a01,y p21 + a02,y p22 .
¸
·
¸
b1
1 + a1
b1
is PSD and so
is positive definite (shortly
a2
b1
1 + a2
·
a1
b1
PD). We have
Note that
·
1
−y
y
1
¸·
1 + a1
b1
b1
1 + a2
¸·
1
−y
y
1
¸>
· 0
a
= 1,y
0
0
¸
a02,y
.
Thus a01,y , a02,y > 0.
Suppose a01,y − a02,y = 0. Then (HQ + C) ◦ ψ1 = H0 + γ C, where γ = a01,y > 0.
Now suppose a01,y − a02,y 6= 0. Then
ψ2 : p 7→ p Ψ2 ,
√
Ψ2 =
1
2|a01,y −a02,y |
0
0
√
1
2|a01,y −a02,y |
0
0
0
0
1
is a linear Poisson automorphism such that
¡
¢
(HQ + C) ◦ (ψ1 ◦ ψ2 ) (p) =
a01,y
2
2|a01,y −a02,y | p1
+
a02,y
2
2|a01,y −a02,y | p2
=
a01,y −a02,y
2
2|a01,y −a02,y | p1
+
a02,y
2|a01,y −a02,y | C(p).
Suppose a01,y − a02,y > 0. Then (HQ + C) ◦ ψ1 = H1 + γ C, where γ =
Suppose a01,y − a02,y < 0. Then
a02,y
2|a01,y −a02,y |
ψ3 : p 7→ p Ψ3 ,
0 1 0
Ψ3 = −1 0 0
0 0 1
is a linear Poisson automorphism such that
¡
¢
(HQ + C) ◦ (ψ1 ◦ ψ2 ◦ ψ3 ) (p) =
a02,y
2
2|a01,y −a02,y | p1
+
a01,y
2
2|a01,y −a02,y | p2
=
a02,y −a01,y
2
2|a01,y −a02,y | p1
+
a01,y
2|a01,y −a02,y | C(p).
Therefore (HQ + C) ◦ (ψ1 ◦ ψ2 ◦ ψ3 ) = H1 + γ C, where γ =
a01,y
2|a01,y −a02,y |
> 0.
> 0.
6
R. M. Adams, R. Biggs and C. C. Remsing
On the other hand suppose a3 6= 0. Then
1
Ψ4 = 0
0
ψ4 : p 7→ pΨ4 ,
− ab23
− ab33
1
0
1
0
is a linear Poisson automorphism such that
¡
¢
>
(HQ + C) ◦ ψ4 (p) = p Ψ4 (Q + C) Ψ>
4 p
b2
1 + a1 − a23
b1 − ba2 b33
>
b2
Ψ4 (Q + C) Ψ4 = b1 − b2 b3
1 + a2 − a33
a3
0
0
0
0 .
a3
>
>
Now Ψ4 (Q + C) Ψ>
4 = Ψ4 Q Ψ4 + C. Hence Ψ4 (Q + C) Ψ4 is PD.
Let
0
a1 b01 0
0 a02 0
Q0 = Ψ4 (Q + C) Ψ>
4 = b1
0 0 a3
for some a01 , a02 , b01 ∈ R. As before, there exists a linear Poisson automorphism ψ1
such that
¡
¢
(HQ + C) ◦ (ψ4 ◦ ψ1 ) (p) = a001 p21 + a002 p22 + a3 p23
= (a002 − a001 )p22 + a3 p23 + a001 C(p)
for some a001 , a002 > 0.
Suppose a002 −a001 = 0. Then (HQ +C)◦(ψ4 ◦ψ1 ) = H3,α +γ C, where α = 2a3 > 0
and γ = a001 > 0. Now suppose a002 − a001 6= 0. Then
ψ5 : p 7→ p Ψ5 ,
√
Ψ5 =
1
00
2|a00
2 −a1 |
0
0
√
0
0
1
00
2|a00
2 −a1 |
0
0
1
is a linear Poisson automorphism such that
¡
¢
(HQ + C) ◦ (ψ4 ◦ ψ1 ◦ ψ5 ) (p) =
00
a00
2
2 −a1
00 | p2
2|a00
−a
2
1
+ a3 p23 +
a00
1
00 C(p).
2|a00
2 −a1 |
Suppose a002 −a001 > 0. Then (HQ +C)◦(ψ4 ◦ψ1 ◦ψ5 ) = H2,α +γ C, where α = 2a3 > 0
a00
00
00
1
and γ = 2|a00 −a
00 | > 0. Suppose a2 − a1 < 0. Then
2
1
¡
¢
(HQ + C) ◦ (ψ4 ◦ ψ1 ◦ ψ5 ◦ ψ3 ) (p) =
00
a00
2
1 −a2
00 p2
2|a00
2 −a1 |
+ a3 p23 +
a00
2
00 C(p).
2|a00
2 −a1 |
Therefore (HQ + C) ◦ (ψ4 ◦ ψ1 ◦ ψ5 ◦ ψ3 ) = H2,α + γ C, where α = 2a3 > 0 and
a00
2
γ = 2|a00 −a
¤
00 | > 0.
2
1
Corollary 3.2. HQ is equivalent to H0 , H1 , H2,α , or H3,α .
On some quadratic Hamilton-Poisson systems
7
~ Q are simply the images, under some linear
Accordingly, the integral curves of H
~ 0, H
~ 1, H
~ 2,α , or H
~ 3,α . The system
Poisson automorphism, of the integral curves of H
~
H0 is trivial, i.e., H0 (p) = 0. The equations of motion for H1 are ṗ1 = ṗ2 = 0,
ṗ3 = −p1 p2 . On the other hand, the equations of motion for H2,α and H3,α are,
respectively,
ṗ1 = α p2 p3
ṗ2 = −α p1 p3
(3.1)
ṗ3 = p1 p2
ṗ1 = α p2 p3
ṗ2 = −α p1 p3
ṗ3 = 0.
(3.2)
4
Stability
~ 2,α . The
We investigate the stability nature of the dynamical system (3.1), i.e., H
equilibrium states are
eν1 = (ν, 0, 0),
and eµ3 = (0, 0, µ)
eν2 = (0, ν, 0)
where µ, ν ∈ R, ν 6= 0.
Theorem 4.1. The equilibrium states have the following behaviour.
(i) Each equilibrium state eν1 is stable.
(ii) Each equilibrium state eν2 is unstable.
(iii) Each equilibrium state eµ3 is stable.
Proof. The linearization of the system is given by
0
α p3 α p2
−α p3
0
−α p1 ·
p2
p1
0
Let Hχ = H2,α + χ(C) be an energy-Casimir function, i.e.,
Hχ (p1 , p2 , p3 ) =
1
2
p22 +
1
2
α p23 + χ(p21 + p22 )
where χ ∈ C ∞ (R). The derivative is given by
£
dHχ = 2p1 χ̇(p21 + p22 ) p2 + 2p2 χ̇(p21 + p22 )
¤
α p3 .
The derivative dHχ vanishes at eν1 if and only if χ̇(ν 2 ) = 0. Then the Hessian (at
eν1 )
¡
¢
d2 Hχ (ν, 0, 0) = diag 4ν 2 χ̈(ν 2 ), 1, α
is positive definite if and only if χ̈(ν 2 ) > 0. The function χ(x) = 12 x2 − xν 2 satisfies
these requirements. Hence, by the standard energy-Casimir method, eν1 is stable.
8
R. M. Adams, R. Biggs and C. C. Remsing
√
The linearization of the system at eν2 has eigenvalues λ1 = 0, λ2,3 = ± α. Thus
eν2 is unstable.
Let Hλ = £λ0 H2,α + λ1¤C, where λ0 = 0, λ1 = 1. Suppose µ 6= 0. Then
dHλ (0, 0, µ) = 2p1 2p2 0 (0,0,µ) = 0 and d2 Hλ (0, 0, µ) = diag (2, 2, 0). Also,
W = ker dH2,α (eµ3 ) ∩ ker dC(eµ3 ) = span {(1, 0, 0), (0, 1, 0)}
¯
and so d2 Hλ (0, 0, µ)¯W ×W = diag (2, 2) is positive definite. Hence, by the extended
energy-Casimir method, eµ3 , µ 6= 0 is stable. On the other hand, suppose µ = 0. We
have d (H + C)(e03 ) = 0 and d2 (H + C)(e03 ) = diag (2, 3, α). Thus the state e03 is
stable.
¤
~ 3,α , are
The equilibrium states for the dynamical system (3.2), i.e., H
eµ,ν
= (µ, ν, 0) 6= 0
1
and
eµ3 = (0, 0, µ)
where µ, ν ∈ R. We have the following result.
Theorem 4.2. The equilibrium states have the following behaviour.
is unstable.
(i) Each equilibrium state eµ,ν
1
(ii) Each equilibrium state eµ3 is stable.
5
Explicit integration
The equations of motion (3.1) and (3.2) can be integrated by Jacobi elliptic functions.
~ 2,α and H
~ 3,α (but shall
We obtain explicit expressions for the integral curves of H
omit any discussion of constant solutions).
~ 2,α . Let c0 = C(p(0)) > 0
Consider an integral curve p(·) : (−ε, ε) → se (2)∗ of H
and h0 = H2,α (p(0)) > 0. (If c0 = 0 or h0 = 0, then p(·) is a constant solution.)
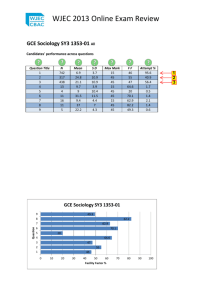
~ 2,α corresponding to (a)
There are three typical cases for the integral curves of H
c0 < 2h0 , (b) c0 = 2h0 , and (c) c0 > 2h0 . In Figure 1, we graph the level sets
of H2,α and C and their intersection for some suitable values of h0 , c0 , and α.
The stable equilibrium points (illustrated in blue) and unstable equilibrium points
(illustrated in red) are also plotted in each case.
We begin with case (a).
~ 2,α such
Theorem 5.1. Suppose p(·) : (−ε, ε) → se(2)∗ is an integral curve of H
that H2,α (p(0)) = h0 > 0, C(p(0)) = c0 > 0, and c0 < 2h0 . Then there exist t0 ∈ R
and σ ∈ {−1, 1} such that p(t) = p̄(t + t0 ) for t ∈ (−ε, ε), where
√
p̄1 (t) = c0 cn (Ω t, k)
√
p̄2 (t) = σ c0 sn (Ω t, k)
q
p̄ (t) = −σ 2h0 dn (Ω t, k) .
3
α
Here k =
q
c0
2h0
and Ω =
√
2αh0 .
On some quadratic Hamilton-Poisson systems
2
E3*
2
2
0
E3*
-2
0
E3*
-2
-2
E2*
-2
E2*
-2
0
-2
2
E2*
2
E3*
-2
0
E3*
E2*
-2
2
2
0
E1*
2
0
E1*
0
-2
-2
-2
0
2
2
-2
-2
-2
2
0
E1*
2
0
0
-2
2
0
E1*
2
E2*
0
-2
0
2
E3*
9
0
E2*
-2
2
0
E1*
2
(b) c0 = 2h0
(a) c0 < 2h0
0
-2
2
0
E1*
(c) c0 > 2h0
~ 2,α
Figure 1: Typical cases for H
~ 2,α satisfying the conditions of the
Proof. Suppose p̄(·) is an integral curve of H
theorem. Then, as C and H2,α are constants of motion, we get
p̄2 (t)2 = c0 − p̄1 (t)2
p̄23 (t) = α1 (p̄1 (t)2 − 2h0 − c0 ).
¢2
¡d
p̄1 (t) = α2 p̄2 (t)2 p̄3 (t)2 yields a
Substituting these expressions into the equation dt
separable differential equation. Hence we have
Z
√
dp̄1
p
·
αt =
(p̄21 + 2h0 − c0 )(c0 − p̄21 )
q
√
c0
Applying the integral formula (2.1) we get p̄1 (t) = c0 cn (Ω t, k), where k = 2h
0
√
√
2
and Ω = 2αh0 . Then c0 cn (Ω t, k) + p̄2 (t)2 = c0 and so p̄2 (t) = σ c0 sn (Ω t, k)
d
for some σ ∈ {−1, 1}. Thus dt
p̄3 (t) = σ c0 cn (Ω t, k) sn (Ω t, k) and so p̄3 (t) =
q
~ 2,α (p̄(t)) for σ ∈
−σ 2h0 dn (Ω t, k). An easy calculation shows that d p̄(t) = H
and
α
dt
~ 2,α for any 0 < c0 < 2h0 and α > 0.
{−1, 1}. Thus p̄(· ) is an integral curve of H
We claim that any integral curve p(·) (as described in the statement of the theorem) must be of the form p(t) = p̄(t + t0 ) for some σ ∈ {−1, 1} and t0 ∈ R (see
Figure 1a). Let σ = sgn(p3 (0)). We may assume σ 6= 0. Note that (p̄1 (t), p̄2 (t))
parametrizes the circle S = {(x, y) : x2 + y 2 = c0 }. We have p1 (0)2 + p2 (0)2 = c0 ,
i.e., (p1 (0), p2 (0)) ∈ S. Therefore, there exists t0 ∈ R such that p̄1 (t0 ) = p1 (0) and
p̄2 (t0 ) = p2 (0). Accordingly, we get
p3 (0)2 =
2
α (h0
− 12 p2 (0)2 ) =
2
α (h0
− 21 p̄2 (t0 )2 ) = p̄3 (t0 )2 .
10
R. M. Adams, R. Biggs and C. C. Remsing
Hence, as sgn(p3 (t0 )) = σ = sgn(p3 (0)), we have p3 (0) = p̄3 (t0 ). Thus the integral
curves t 7→ p(t) and t 7→ p̄(t + t0 ) solve the same Cauchy problem, and therefore are
identical.
¤
By utilizing formula (2.2), a similar argument can be made for case (c).
~ 2,α such
Theorem 5.2. Suppose p(·) : (−ε, ε) → se(2)∗ is an integral curve of H
that H2,α (p(0)) = h0 > 0, C(p(0)) = c0 > 0, and c0 > 2h0 . Then there exist t0 ∈ R
and σ ∈ {−1, 1} such that p(t) = p̄(t + t0 ) for t ∈ (−ε, ε), where
√
p̄1 (t) = σ c0 dn (Ω t, k)
p
p̄2 (t) = 2h0 sn (Ω t, k)
q
p̄3 (t) = −σ 2hα0 cn (Ω t, k) .
q
Here k =
2h0
c0
and Ω =
√
αc0 .
Next we consider case (b).
~ 2,α such
Proposition 5.3. Suppose p(·) : (−ε, ε) → se(2)∗ is an integral curve of H
that H2,α (p(0)) = h0 > 0, C(p(0)) = c0 > 0, and c0 = 2h0 . Then there exist t0 ∈ R
and σ1 , σ2 ∈ {−1, 1} such that p(t) = p̄(t + t0 ) for t ∈ (−ε, ε), where
√
√
p̄1 (t) = σ1 c0 sech ( αc0 t)
√
√
p̄2 (t) = σ1 σ2 c0 tanh ( αc0 t)
q
p̄3 (t) = −σ2 c0 sech (√αc0 t) .
α
Proof. By limiting h0 → 12 c0 in Theorem 5.1 (or Theorem 5.2), and allowing for
~ 2,α
possible changes in sign, we obtain the following prospective integral curve for H
√
p̄1 (t) = ς1 c0 sech (Ω t)
√
p̄2 (t) = ς2 c0 tanh (Ω t)
q
p̄3 (t) = ς3 cα0 sech (Ω t)
√
where Ω = αc0 and ς1 , ς2 , ς3 ∈ {−1, 1}. We investigate under which conditions
p̄(·) is an integral curve. Now
√
d
p̄1 (t) − α p̄2 (t)p̄3 (t) = − (ς1 + ς2 ς3 ) c0 Ω sech(Ω t) tanh(Ω t).
dt
d
Therefore, if ς1 = σ1 , ς2 = σ1 σ2 , ς3 = −σ2 , and σ1 , σ2 ∈ {−1, 1}, then dt
p̄1 (t) =
α p̄2 (t)p̄3 (t). It is easy to verify that in this case p̄(·) is indeed an integral curve. Any
integral curve p(·) (as described in the statement of the theorem) is then of the form
p(t) = p̄(t + t0 ) for some σ1 , σ2 ∈ {−1, 1} and t0 ∈ R (see Figure 1b).
¤
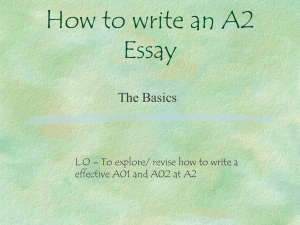
~ 3,α . There is only one typical case.
Finally, let us consider the integral curves of H
As before, we graph the level sets of H3,α and C and their intersection in Figure 2.
A straightforward computation gives the solutions.
On some quadratic Hamilton-Poisson systems
2
2
E3*
11
0
E3*
0
-2
-2
-2
-2
0
E2*
-2
2
2
0
E1*
0
E2*
-2
2
2
0
E1*
~ 3,α
Figure 2: Typical case for H
~ 3,α such
Proposition 5.4. Suppose p(·) : (−ε, ε) → se(2)∗ is an integral curve of H
that H3,α (p(0)) = h0 > 0 and C(p(0)) = c0 > 0. Then there exist t0 ∈ R and
σ ∈ {−1, 1} such that p(t) = p̄(t + t0 ) for t ∈ (−ε, ε), where
p
√
p̄
(t)
=
c
sin(
2αh0 t)
0
1
p
√
p̄2 (t) = σ c0 cos( 2αh0 t)
q
p̄ (t) = σ 2h0 ·
3
α
6
Concluding remark
Quadratic Hamilton-Poisson systems on Lie-Poisson spaces can be linked to invariant
optimal control problems on Lie groups (with affine dynamics and quadratic cost).
The Pontryagin Maximum Principle provides necessary conditions for optimality of
trajectory-control pairs (g(·), u(·)). For an optimal control problem (1.1), it turns
out that
extremal control is given by u(t) = Q−1 B> p(t)> ([8]). Here
£ every (normal)
¤
B = B1 · · · B` is a 3 × ` matrix and p(·) : [0, T ] → se (2)∗ is an integral curve
of the system H(p) = 12 p B Q−1 B> p> . Notice that 12 B Q−1 B> is a 3 × 3 positive
semidefinite matrix of rank `. Thus each extremal control is the image (under a linear
map) of an integral curve of one of the systems considered in this paper.
References
[1] R.M. Adams, R. Biggs, C.C. Remsing, Single-input control systems on the Euclidean
group SE (2), Eur. J. Pure Appl. Math. 5, 1 (2012), 1-15.
[2] R.M. Adams, R. Biggs, C.C. Remsing, Two-input control systems on the Euclidean
group SE (2), ESAIM: COCV 19, 4 (2013), to appear.
[3] A.A. Agrachev, Y.L. Sachkov, Control Theory from the Geometric Viewpoint, SpringerVerlag, 2004.
[4] J.V. Armitage, W.F. Eberlein, Elliptic Functions, Cambridge University Press, 2006.
[5] A. Aron, C. Dăniasă, M. Puta, Quadratic and homogeneous Hamilton-Poisson system
on so (3)∗ , Int. J. Geom. Methods Mod. Phys. 4, 7 (2007), 1173-1186.
[6] A. Aron, M. Craioveanu, C. Pop, M. Puta, Quadratic and homogeneous HamiltonPoisson systems on A∗3,6,−1 , Balkan J. Geom. Appl. 15, 1 (2010), 1-7.
12
R. M. Adams, R. Biggs and C. C. Remsing
[7] A. Aron, C. Pop, M. Puta, Some remarks on (sl (2, R))∗ and Kahan’s Integrator, An.
Ştiinţ. Univ. Al. I. Cuza Iaşi. Mat. (N.S.) 53, suppl. 1 (2007), 49-60.
[8] R. Biggs, C.C. Remsing, On the equivalence of cost-extended control systems on Lie
groups, Recent Researches in Automatic Control, Systems Science and Communications
(H.R. Karimi, ed.). WSEAS Press (2012), 60-65.
[9] J. Biggs, W. Holderbaum, Integrable quadratic Hamiltonians on the Euclidean group of
motions, J. Dyn. Control Syst. 16, 3 (2010), 301-317.
[10] C. Dăniasă, A. Gı̂rban, R.M. Tudoran, New aspects on the geometry and dynamics of
quadratic Hamiltonian systems on (so (3))∗ , Int. J. Geom. Methods Mod. Phys. 8, 8
(2011), 1695-1721.
[11] H. Gümral, Y. Nutku, Poisson structure of dynamical systems with three degrees of
freedom, J. Math. Phys. 34, 12 (1993), 5691-5723.
[12] D.D. Holm, J.E. Marsden, T. Ratiu, A. Weinstein, Nonlinear stability of fluid and
plasma equilibria, Phys. Rep. 123, 1&2 (1985), 1-116.
[13] V. Jurdjevic, Non-Euclidean elastica, Amer. J. Math. 117 (1995), 93-124.
[14] V. Jurdjevic, Geometric Control Theory, Cambridge University Press, 1997.
[15] D.F. Lawden, Elliptic Functions and Applications, Springer-Verlag, 1989.
[16] P. Libermann, C-M. Marle, Symplectic Geometry and Analytical Mechanics, Kluwer,
1987.
[17] J.E. Marsden, T.S. Ratiu, Introduction to Mechanics and Symmetry (Second Edition),
Springer-Verlag, 1999.
[18] J-P. Ortega, T.S. Ratiu, Non-linear stability of singular relative periodic orbits in Hamiltonian systems with symmetry, J. Geom. Phys. 32, 2 (1999), 160-188.
[19] J-P. Ortega, V. Planas-Bielsa, T.S. Ratiu, Asymptotic and Lyapunov stability of constrained and Poisson equilibria, J. Diff. Equations 214, 1 (2005), 92-127.
[20] M. Puta, Hamiltonian Mechanical Systems and Geometric Quantization, Kluwer, 1993.
[21] M. Puta, S. Chirici, A. Voitecovici, An optimal control problem on the Lie group
SE (2, R), Publ. Math. Debrecen 60, 1&2 (2002), 15-22.
[22] M. Puta, G. Schwab, A. Voitecovici, Some remarks on an optimal control problem on
the Lie group SE (2, R), An. Ştiinţ. Univ. Al. I. Cuza Iaşi. Mat. (N.S.) 49, 2 (2003),
249-256.
[23] C.C. Remsing, Control and stability on the Euclidean group SE (2), Lect. Notes Eng.
Comp. Sci.: Proc. WCE 2011, London, U.K., 225-230.
[24] Y.L. Sachkov, Maxwell strata in the Euler elastic problem, J. Dyn. Control Syst. 14, 2
(2008), 169-234.
[25] R.M. Tudoran, On a class of three-dimensional quadratic Hamiltonian systems, Appl.
Math. Lett. 25, 9 (2012), 1214-1216.
[26] R.M. Tudoran, R.A. Tudoran, On a large class of three-dimensional Hamiltonian systems, J. Math. Phys. 50, 1 (2009), 012703.
Authors’ address:
Ross M. Adams, Rory Biggs and Claudiu C. Remsing
Department of Mathematics (Pure and Applied),
Rhodes University, PO Box 94, 6140 Grahamstown, South Africa.
E-mail: dros@webmail.co.za , rorybiggs@gmail.com , c.c.remsing@ru.ac.za