Document 10467433
advertisement

Hindawi Publishing Corporation
International Journal of Mathematics and Mathematical Sciences
Volume 2012, Article ID 943621, 20 pages
doi:10.1155/2012/943621
Research Article
A Regularization of the Backward
Problem for Nonlinear Parabolic Equation with
Time-Dependent Coefficient
Pham Hoang Quan,1 Le Minh Triet,1 and Dang Duc Trong2
1
Department of Mathematics and Applications, Sai Gon University, 273 An Duong Vuong,
District 5, Ho Chi Minh City, Vietnam
2
Department of Mathematics, University of Natural Science, Vietnam National University,
227 Nguyen Van Cu, District 5, Ho Chi Minh City, Vietnam
Correspondence should be addressed to Le Minh Triet, lmtriet2005@yahoo.com.vn
Received 31 March 2012; Revised 21 June 2012; Accepted 11 August 2012
Academic Editor: Theodore E. Simos
Copyright q 2012 Pham Hoang Quan et al. This is an open access article distributed under the
Creative Commons Attribution License, which permits unrestricted use, distribution, and
reproduction in any medium, provided the original work is properly cited.
We study the backward problem with time-dependent coefficient which is a severely ill-posed
problem. We regularize this problem by combining quasi-boundary value method and quasireversibility method and then obtain sharp error estimate between the exact solution and the regularized solution. A numerical experiment is given in order to illustrate our results.
1. Introduction
We consider the inverse time problem for the nonlinear parabolic equation
ut x, t − atuxx x, t fx, t, ux, t,
u0, t uπ, t 0,
ux, T gx,
x, t ∈ 0, π × 0, T ,
t ∈ 0, T ,
x ∈ 0, π,
1.1
1.2
1.3
where at is thermal conductivity function of 1.1 such that there exist p, q > 0 satisfying
0 < p ≤ at ≤ q,
for all t ∈ 0, T .
1.4
2
International Journal of Mathematics and Mathematical Sciences
In other words, from the temperature distribution at a particular time t T final data,
we want to retrieve the temperature distribution at any earlier time t < T . This problem is
called the backward heat problem BHP, or final-value problem. As known, this problem is
severely ill-posed in Hadamard’s sense; that is, solutions do not always exist, and when they
exist, they do not depend continuously on the given data. In practice, datum g is based on
physical measurements. Hence, there will be measurement errors, and we would actually
have datum function gδ such that gδ − gL2 0,π ≤ δ. Thus, form small error contaminating
physical measurements, the solutions corresponding to datum function gδ have large errors.
This makes it difficult to make numerical calculations with perturbed data.
In our knowledge, there have been many papers on the linear homogeneous case of the
backward problem, but there are a few papers on the nonhomogeneous case and the nonlinear case such as 1–6; especially, the nonlinear case with time-dependent thermal conductivity coefficient is very scarce. Moreover, the thermal conductivity is the property of a material’s
ability to conduct heat. Therefore, the thermal conductivity is not a constant in some cases. In
this paper, we extend the result in 7 for the case of the time-dependent thermal conductivity at. In future, we will research the BHP problem for the case of the time- and spacedependent thermal conductivity ax, t.
In 8, the authors used the quasi-reversibility method to regularize a 1D linear
nonhomogeneous backward problem. Very recently, in 9, the methods of integral equations
and of Fourier transform have been used to solve a 1D problem in an unbounded region. In
recent articles considering the nonlinear backward heat problem, we refer the reader to 10.
In 11, the authors used the quasi-boundary value method to regularize the latter problem.
However, in 11, the authors showed that the error between the regularized solution and the
exact solution is
uδ ·, t − u·, t ≤ Ktδt/T ,
0 < t < T.
1.5
It is easy to see that the convergence of the error estimate between the regularized
solution and the exact solution is very slow when t is in a neighborhood of zero. For this
reason, the error estimate in initial time is given by
1
uδ ·, t − u·, t ≤ K
ln1/δ
1/4
.
1.6
We can easily find that the exact solution of 1.1–1.3 satisfies
ux, t ∞
uk t sinkx,
1.7
k1
where
uk t ek
2
fk us π
2
λT −λt
π
gk −
T
ek
2
λs−λt
fk usds,
fx, s, ux, s sinkxdx,
0
1.8
t
1.9
International Journal of Mathematics and Mathematical Sciences
2 π
gx sinkxdx,
gk π 0
t
asds.
λt 3
1.10
1.11
0
In this paper, we will approximate 1.1–1.3 by using the regularization problem:
∞
e−k λT f uδ t sinkx,
uδ t x, t − atuδ xx x, t −k2 λT k
k1 αk δ e
2
1.12
uδ 0, t uδ π, t 0,
uδ x, T ∞
e−k λT g sinkx,
−k2 λT k
k1 αk δ e
2
where αk δ δk2 . Actually, in 12, we also considered the problem 1.1–1.3 for the
homogeneous case f 0 in R. Hence, we want to extend for the nonlinear case fx, t, u
in bounded region 0, π, and this is the biggest different point in this paper.
The remainder of this paper is organized as follows. In Section 2, we shall regularize
the ill-posed problem 1.1–1.3 and give the error estimate between the regularized solution
and the exact solution. Then, in Section 3, a numerical example is given.
2. Regularization and Error Estimates
For clarity of notation, we denote the solution of 1.1–1.3 by ux, t and the solution of the
regularized problem 1.12 by uδ x, t. Throughout this paper, we denote λ1 max{1, λT },
and, δ be a positive number such that 0 < δ < λT . Hereafter, we have a number of inequalities in order to evaluate error estimates.
Lemma 2.1. Let at be a function satisfying 1.4, αk δ δk2 , Bδ δ lnλT /δ−1 and λt
be as in 1.11. Then for k > 0 and 0 ≤ t ≤ s ≤ T , one gets
i ek λs−λt−λT /αk δ e−k
λ1 Bδ λs−λt/λT ,
2
ii e−k
2
λt
/αk δ e−k
2
λT 2
λT ≤
≤ λ1 δ lnλT /δ
λ1 δ lnλT /δλt−λs/λT λt−λT /λT λ1 Bδ λT −λt/λT .
Proof of Lemma 2.1. The proof of Lemma 2.1 can be found in 12.
Theorem 2.2. Let g ∈ L2 0, π and f ∈ L∞ 0, π × 0, T × R such that there exists L > 0
independent of x, t, u, v satisfying
fx, t, u − fx, t, v ≤ L|u − v|.
2.1
4
International Journal of Mathematics and Mathematical Sciences
Then problem 1.12 has a unique weak solution uδ ∈ W C0, T ; L2 0, π satisfying the following equality:
uδ x, t ∞
k1
e−k λt
gk −
αk δ e−k2 λT 2
T
t
2
ek λs−λt−λT fk uδ sds sinkx,
αk δ e−k2 λT 2.2
where
2
π
gk 2
fk uδ s π
π
gx sinkxdx,
0
π
2.3
fx, s, uδ sinkxdx.
0
Proof of Theorem 2.2. Step 1. The existence and the uniqueness of the solution of the problem
2.2.
Put
Fux, t ∞
Pk t − Kk ut sinkx,
2.4
k1
where
e−k λt
gk ,
αk δ e−k2 λT 2
Pk t Kk ut T
t
ek λs−λt−λT fk usds.
αk δ e−k2 λT 2
2.5
We claim that, for every u, v ∈ C0, T ; L2 0, π, k ≥ 1, we have
2 T − tk
k
2
2k
Bδ 2kq/p Cλ2k
F u·, t − F k v·, t ≤
1 L u − vC0,T ; L2 0,π ,
k!
2.6
where C max{1, T } and · C0,T ; L2 0,π is supremum norm in C0, T ; L2 0, π. We shall
prove this inequality by induction. For k 1, we have
Fu·, t − Fv·, t2
∞
π
Kk ut − Kk vt2
2 k1
International Journal of Mathematics and Mathematical Sciences
5
2
∞ T k2 λs−λt−λT e
π
fk us − fk vs ds
2 k1 t αk δ e−k2 λT ⎤
⎡ 2 T
∞ T
k2 λs−λt−λT 2
e
π
⎣
≤
ds
fk us − fk vs ds⎦.
2 k1 t
αk δ e−k2 λT t
2.7
From Lemma 2.1, we get
Fu·, t − Fv·, t2
⎤
⎡ λt−λs/λT 2 T
∞ T
2
π
λT
⎣
λ1 δ ln
≤
ds
fk us − fk vs ds⎦.
2 k1 t
δ
t
2.8
It follows
Fu·, t − Fv·, t2
T
∞ T
2
π
2λs−λt/λT 2
≤
λ Bδ ds
fk us − fk vs ds
2 k1 t 1
t
T
∞ T
2
π
2qs−pt/pT
2
λ Bδ ds
fk us − fk vs ds
≤
2 k1 t 1
t
T
∞ T
2
π
2q/p
2
λ Bδ ds
fk us − fk vs ds
≤
2 k1 t 1
t
2q/p
λ21 Bδ T
− t
T π
t
2.9
2
fx, s, ux, s − fx, s, vx, s dx ds.
0
Therefore, we have
Fu·, t − Fv·, t2
≤
2q/p
λ21 L2 Bδ T
2q/p
≤ T − tBδ
where C max{1, T }.
− t
T π
t
ux, s − vx, s2 dx ds
0
Cλ21 L2 u − v2C
0,T ; L2 0,π
,
2.10
6
International Journal of Mathematics and Mathematical Sciences
Thus, 2.6 holds for k 1. Supposing that 2.6 holds for k n, we shall prove that
2.6 holds for k n 1. In fact, we get
2
n1
F u·, t − F n1 v·, t
∞
π
Kk F n ut − Kk F n vt2
2 k1
2.11
T 2
2
∞
ek λs−λt−λT π
n
n
fk F us − fk F vs ds .
−k2 λT 2 k1
t αk δ e
Hence, we obtain
2
n1
F ux, t − F n1 vx, t
≤
π
Bδ 2q/p λ21 T − t
2
Bδ 2q/p λ21 T
− t
T ∞
t k1
T
t
≤ Bδ 2q/p λ21 T − tL2
2
fk F n us − fk F n vs ds
f·, s, F n u·, s − fk ·, s, F n v·, s2 ds
T
2.12
F n u·, s − F n v·, s2 ds.
t
Thus, we have
2
n1
F ux, t − F n1 vx, t
T
T − sn n
C u − v2C 0,T ; L2 0,π ds
n!
t
T
T − sn
2
2n1q/p 2n2
n
2n2
ds
≤ C Bδ λ1 T − tL
u − vC0,T ; L2 0,π
n!
t
≤ Bδ 2q/p λ21 T − tL2
≤
L2n Bδ 2nq/p λ2n
1
2.13
T − tn1 n1
C Bδ 2n1q/p λ2n2
T − tL2n2 u − v2C0,T ; L2 0,π .
1
n 1!
Therefore, by the induction principle, we have
T − tk/2
k
Bδ kq/p Ck/2 λk1 Lk u − vC0,T ; L2 0,π ,
√
F ux, t − F k vx, t ≤
k!
for all u, v ∈ C0, T ; L2 0, π.
2.14
International Journal of Mathematics and Mathematical Sciences
7
We consider F : C0, T ; L2 0, π → C0, T ; L2 0, π. Since
T − tk/2
Bδ kq/p λk1 Ck/2 Lk −→ 0,
√
k!
2.15
when k → ∞, there exists a positive integer number k0 such that
T − tk0 /2
Bδ k0 q/p λk1 0 Ck0 /2 Lk0 < 1,
k0 !
2.16
and F k0 is a contraction. It follows that the equation F k0 u u has a unique solution uδ ∈
C0, T ; L2 0, π.We claim that Fuδ uδ . In fact, one has FF k0 uδ Fuδ . Hence,
F k0 Fuδ Fuδ . By the uniqueness of the fixed point of F k0 , one has Fuδ uδ ; that is,
the equation Fu u has a unique solution uδ ∈ C0, T ; L2 0, π.
Step 2. If uδ ∈ W satisfies 2.2, then uδ is the solution of the problem 1.12. For 0 ≤ t ≤ T , we
have
uδ x, t ∞
k1
e−k λt
gk −
αk δ e−k2 λT 2
T
t
2
ek λs−λt−λT fk uδ sds sinkx.
αk δ e−k2 λT 2.17
We can verify directly that uδ ∈ C0, T ; L2 0, π ∩ L2 0, T ; H01 0, π ∩
C 0, T ; H01 0, π. In fact, uδ ∈ C∞ 0, T ; H01 0, π. Moreover, one has
1
uδ t x, t ∞
− k2 at
e−k
2
λt
gk −
∞
∞
ek
2
λs−λt−λT fk uδ sds
sinkx
e−k λT f uδ t sinkx
−k2 λT k
k1 αk δ e
2
− atuδ xx x, t uδ x, T t
αk δ e−k2 λT k1
T
∞
2.18
−k2 λT e
fk uδ t sinkx,
α
e−k2 λT δ
k1 k
e−k λT g sinkx.
−k2 λT k
k1 αk δ e
2
Hence, uδ is the solution of 1.12.
Step 3. The problem 1.12 has at most one solution uδ ∈ C0, T ; L2 0, π ∩
L2 0, T ; H01 0, π ∩ C1 0, T ; H01 0, π. In fact, let uδ and vδ be two solutions of 1.12 such
that uδ , vδ ∈ W. Putting wδ x, t uδ x, t − vδ x, t, then wδ satisfies
wδ t − wδ xx ∞
e−k λT fk uδ t − fk vδ t sinkx.
2 λT −k
k1 αk δ e
2
2.19
8
International Journal of Mathematics and Mathematical Sciences
It follows that
wδ t − wδ xx 2 ≤
≤
∞
2
1
fk uδ t − fk vδ t
2
δ k1
1
f·, t, uδ ·, t − f·, t, vδ ·, t2
δ2
2.20
L2
≤ 2 uδ ·, t − vδ ·, t2
δ
L2
wδ ·, t2 .
δ2
By using the result in Lees and Protter 13, we get wδ ·, t 0. This completes the
proof of Step 3.
Finally, by combining three steps, we complete the proof of Theorem 2.2.
Theorem 2.3 stability of the modified method. Let f be as in Theorem 2.2, αk δ δk2 , g and let
gδ in L2 0, π satisfy gδ − g ≤ δ. If one supposes that uδ and vδ defined by 2.2 are corresponding
to the final values g and gδ in L2 0, π, respectively, then one obtains
uδ ·, t − vδ ·, t ≤
√
λt−λT /λT λT 2 2
2λ1 eL λ1 T T −t δλt/λT ln
.
δ
2.21
Proof of Theorem 2.3. Using the inequality a b2 ≤ 2a2 b2 and Lemma 2.1, we get the
estimate
uδ ·, t − vδ ·, t2
2
2
∞ e−k λt
≤π gk − gk,δ −k2 λT k1 αk δ e
2
∞ T k2 λs−λt−λT e
π fk uδ s − fk vδ s ds
−k2 λT k1 t αk δ e
2.22
2
2
∞ e−k λt
≤π gk − gk,δ −k2 λT k1 αk δ e
∞ T
πT − t
k1
t
ek λs−λt−λT fk uδ s − fk vδ s
αk δ e−k2 λT 2
2
ds.
International Journal of Mathematics and Mathematical Sciences
9
Thus, we get
uδ ·, t − vδ ·, t2
≤ πλ21 Bδ 2λT −λt/λT ∞ gk − gk,δ 2
2.23
k1
πT − t
∞ T
k1
t
2
λ21 Bδ 2λs−λt/λT fk uδ s − fk vδ s ds.
Hence, we obtain
uδ ·, t − vδ ·, t2
≤ πλ21 Bδ 2λT −λt/λT ∞ gk − gk,δ 2
k1
λ21 πT Bδ 2λT −λt/λT ∞ T
k1
≤ πλ21 Bδ 2λT −λt/λT 2
Bδ 2λs−λT /λT fk uδ s − fk vδ s ds
t
∞ gk − gk,δ 2
k1
λ21 πT Bδ 2λT −λt/λT T
Bδ 2λs−λT /λT t
∞ fk uδ s − fk vδ s2 ds.
k1
2.24
Thus, we get
Bδ 2λt−λT /λT uδ ·, t − vδ ·, t2
2
≤ 2λ21 g − gδ T
2
2λ21 T
Bδ 2λs−λT /λT f·, s, uδ ·, s − f·, s, vδ ·, s
t
2.25
2
≤ 2λ21 g − gδ T
2 2
2L λ1 T
Bδ 2λs−λT /λT uδ ·, s − vδ ·, s2 .
t
By using Gronwall’s inequality, we have
2
2 2
Bδ 2λt−λT /λT uδ ·, t − vδ ·, t2 ≤ 2λ21 e2L λ1 T T −t gδ − g .
2.26
10
International Journal of Mathematics and Mathematical Sciences
It follows
uδ ·, t − vδ ·, t ≤
≤
√
2 2
2λ1 eL λ1 T T −t Bδ λT −λt/λT gδ − g λt−λT /λT √
λT 2 2
2λ1 eL λ1 T T −t δλt/λT ln
.
δ
2.27
This completes the proof of Theorem 2.3.
Theorem 2.4. Let u be the exact solution of problem 1.1–1.3 such that
Qt 3λ21 e3L T λ1 T −t uxx ·, 02 < ∞,
T π ∞ 2
2 k2 λs
2 3L2 T λ21 T −t
Mt 6T λ1 e
us x, s − asuxx x, s dx ds < ∞,
k e
2
0
2
2.28
0 k1
for all t ∈ 0, T . Letting αk δ δk2 and vδ ·, t given by 2.2 corresponding to the perturbed data
gδ , then one has for every t ∈ 0, T λt−λT /λT λT ,
u·, t − vδ ·, t ≤ Ctδλt/λT ln
δ
where Ct √
2λ1 eL λ1 T T −t 2 2
2.29
Qt Mt.
Proof of Theorem 2.4. From 1.1, we construct the regularized solution corresponding to the
exact data and the perturbed data
uδ x, t ∞
uk,δ t sinkx,
2.30
vk,δ t sinkx,
2.31
k1
vδ x, t ∞
k1
where
e−k λt
uk,δ t gk −
αk δ e−k2 λT 2
e−k λt
gk,δ −
αk δ e−k2 λT 2
vk,δ t T
t
T
t
ek λs−λt−λT fk uδ sds,
αk δ e−k2 λT 2.32
ek λs−λt−λT fk vδ sds.
αk δ e−k2 λT 2.33
2
2
International Journal of Mathematics and Mathematical Sciences
11
Since 1.8 and 2.32, we get
|uk t − uk,δ t|
T
2
αk δe−k2 λt k2 λT αk δek λs−λt−λT k2 λT gk −
fk usds
e
2 λT α δ e−k2 λT e
−k
αk δ e
k
t
.
2
T k λs−λt−λT e
−
f
ds
f
u
s
us
k
δ
k
2
−k λT t αk δ e
2.34
From αk δ δk2 , we get
|uk t − uk,δ t|
T k2 λs−λt−λT δe−k2 λt
δe
2
2
2 k λT 2 k λT ≤ 2
k
e
g
−
k
e
f
usds
k
k
2
2
2
−k
λT
δk e−k λT δk e
t
T ek2 λs−λt−λT fk uδ s − fk us ds
t δk2 e−k2 λT T
δe−k2 λt 2 k2 λT 2
k2 λs
≤ 2
gk − k
e
fk usds
k e
2 λT −k
δk e
0
δe−k2 λt T 2 k2 λs
2
e
f
us
ds
k
k
2
δk e−k λT 0
T ek2 λs−λt−λT fk uδ s − fk us ds.
t δk2 e−k2 λT 2.35
By applying the inequality a b c2 ≤ 3a2 b2 c2 , we get
u·, t − uδ ·, t2
∞
π
|uk,δ t − uk t|2
2 k1
2
2 T
∞ −k2 λt
3π δe
2 k2 λT 2
k2 λs
k
≤
e
g
−
k
e
f
usds
2
k
k
2 k1 δk e−k2 λT 0
2 2
T
∞ −k2 λt
3π δe
2 k2 λs
fk usds
k e
2 k1 δk2 e−k2 λT 0
2
∞ T k2 λs−λt−λT 3π e
fk uδ s − fk us ds .
2 k1 t δk2 e−k2 λT 2.36
12
International Journal of Mathematics and Mathematical Sciences
Using Lemma 2.1, we obtain
u·, t − uδ ·, t2
3π 2
λ L1 t L2 t L3 t,
2 1
2λt−λT /λT ∞ 2
λT 3π 2 2λt/λT 2
λ1 δ
ln
k uk 0
2
δ
k1
≤
2
T
2λt−λT /λT ∞
3π 2 2λt/λT λT 2 k2 λs
λ δ
fk usds
ln
k e
2 1
δ
0
k1
2λt−λT /λT 3π 2 2λt/λT λT λ1 T δ
ln
2
δ
T
2λT −λs/λT ∞ λT fk uδ s − fk us 2 ds,
×
δ−2λs/λT ln
δ
t
k1
2.37
where
2λt−λT /λT ∞ 2
λT 2
L1 t δ2λt/λT ln
k uk 0 ,
δ
k1
L2 t δ
2λt/λT 2
T
2λt−λT /λT ∞
λT 2 k2 λs
fk usds ,
ln
k e
δ
0
k1
2λt−λT /λT λT L3 t T δ
ln
δ
T
2λT −λs/λT ∞ λT fk uδ s − fk us 2 ds.
×
δ−2λs/λT ln
δ
t
k1
2λt/λT 2.38
Hence, we get the following estimates
2λt−λT /λT 3π 2
λT 2 2λt/λT λ L1 t ≤ 3λ1 δ
ln
uxx ·, 02 ,
2 1
δ
2λt−λT /λT T ∞
3π 2
λT 3π 2 2λt/λT 2
λ1 L2 t ≤
T λ1 δ
k4 e2k λs fk2 usds,
ln
2
2
δ
0 k1
2λt−λT /λT 3π 2
λT 2 2
2λt/λT λ L3 t ≤ 3L λ1 T δ
ln
2 1
δ
T
2λT −λs/λT λT ×
δ−2λs/λT ln
u·, s − uδ ·, s2 ds.
δ
t
2.39
International Journal of Mathematics and Mathematical Sciences
13
From the estimate 2.39, we get
u·, t − uδ ·, t2
2λt−λT /λT λT ≤ 3λ21 δ2λt/λT ln
δ
T ∞
π
2
4 2k2 λs 2
× uxx ·, 0 T
k e
fk usds
2
0 k1
2.40
2λt−λT /λT λT 3L2 T λ21 δ2λt/λT ln
δ
T
2λT −2λs/λT 2
λT −2λs/λT ×
δ
ln
u·, s − uδ ·, s ds.
δ
t
Hence, we have
2λT −λt/λT λT δ−2λt/λT ln
u·, t − uδ ·, t2
δ
T ∞
π
2
2
4 2k2 λs 2
≤ 3λ1 uxx ·, 0 T
k e
fk usds
2
0 k1
3L2 T λ21
T
t
2λT −2λs/λT 2
λT δ−2λs/λT ln
u·, s − uδ ·, s ds.
δ
2.41
Applying Gronwall’s inequality, we obtain
2λT −2λt/λT λT δ−2λt/λT ln
u·, t − uδ ·, t2
δ
T ∞
π
2
2 3L2 T λ21 T −t
4 2k2 λs 2
≤ 3λ1 e
k e
fk usds .
uxx ·, 0 T
2
0 k1
Hence, we get
2λT −2λt/λT λT δ−2λt/λT ln
u·, t − uδ ·, t2
δ
T ∞
2
π
2
2 3L2 T λ21 T −t
4 2k2 λs
≤ 3λ1 e
k e
fk us ds
uxx ·, 0 T
2
0 k1
2.42
14
International Journal of Mathematics and Mathematical Sciences
T 2 π
∞
2
2
2 3L2 T λ21 T −t
4 2k2 λs
3λ1 e
k e
fx, s, ux, s sinkxdx ds
uxx ·, 0 T
π
0 k1
0
T π
∞
2
2
2 3L2 T λ21 T −t
4 2k2 λs
fx, s, ux, s dx ds .
k e
≤ 3λ e
uxx ·, 0 2T
1
0 k1
0
2.43
From 1.1, we have
2λT −2λt/λT λT δ−2λt/λT ln
u·, t − uδ ·, t2
δ
T π
∞
2
2
2 3L2 T λ21 T −t
4 2k2 λs
fx, s, ux, s dx ds
≤ 3λ1 e
k e
uxx ·, 0 2T
0 k1
0
≤ 3λ21 e3L T λ1 T −t
2
×
2
T π ∞ 2
2 k2 λs
us x, s − asuxx x, s dx ds
uxx ·, 0 2T
k e
2
0
0 k1
Qt Mt,
2.44
where
Qt 3λ21 e3L T λ1 T −t uxx ·, 02 ,
T π ∞ 2
2
2
2 k2 λs
Mt 6T λ21 e3L T λ1 T −t
us x, s − asuxx x, s dx ds.
k e
2
0
2
2.45
0 k1
Therefore, we get the estimate
u·, t − uδ ·, t ≤
λt−λT /λT λT Qt Mtδλt/λT ln
.
δ
2.46
Let vδ be the solution of 1.12 corresponding to the perturbed data gδ , and let uδ be
the solution of 1.12 corresponding to the exact data g. From Theorem 2.3 and 2.46, we can
get
vδ ·, t − u·, t ≤ vδ ·, t − uδ ·, t uδ ·, t − u·, t
λt−λT /λT √
λT L2 λ21 T T −t λt/λT δ
≤ 2λ1 e
ln
δ
International Journal of Mathematics and Mathematical Sciences
15
λt−λT /λT λT Qt Mtδ
ln
δ
λt−λT /λT λT Ctδλt/λT ln
,
δ
λt/λT 2.47
√
2 2
where Ct 2λ1 eL λ1 T T −t Qt Mt.
This completes the proof of Theorem 2.4.
3. Numerical Experiment
Consider the nonlinear parabolic equation with time-dependent coefficient:
ut x, t − atuxx x, t fx, t, ux, t,
u0, t uπ, t 0,
ux, T gx,
x, t ∈ 0, π × 0, 1,
t ∈ 0, 1,
3.1
x ∈ 0, π,
where
at 2t 1,
fx, t, ux, t u 4et sinx cosx2t 1,
3.2
gx e sinx cosx.
The exact solution of the equation is
ux, t et sinx cosx.
3.3
Letting t 0, from 3.3, we have
ux, 0 sinx cosx.
3.4
Consider the measured data
gδ x δ
1 g gx 1
δ
gx.
1.7034
3.5
Then we have
gδ − g δ.
3.6
16
International Journal of Mathematics and Mathematical Sciences
Table 1
δ
δ1
δ2
δ3
δ4
δ5
δ6
δ7
δ8
vδi n·, 0 − u·, 02
3.763414e − 001
3.735245e − 001
3.475127e − 001
2.048545e − 001
4.012725e − 002
4.491189e − 007
2.638466e − 013
2.179771e − 013
10−1
10−2
10−3
10−4
10−5
10−10
10−20
10−50
From 2.31 and 3.5, we have the regularized solution for the case t 0 in the form
of iteration
vδ nω, 0 ∞
vδ,k nx, 0 sinkx,
3.7
k1
where
1
exp k2 s2 s − 2
1
vδ,k nx, 0 gδ,k −
fk vδ n − 1sds,
2
αk δ exp{−2k2 }
t αk δ exp{−2k }
2 π
gδ x sinkxdx,
gδ,k π 0
3.8
vδ 1x, 0 1 δ sinx cosx,
αk δ δk2 .
We consider δ1 10−1 , δ2 10−2 , δ3 10−3 , δ4 10−4 , δ5 10−5 , δ6 10−10 , δ7 10−20 ,
δ8 10−50 , and n 10. Now, we get Table 1 for the case t 0.
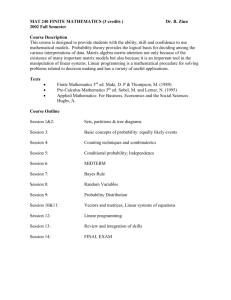
We have in Figure 1 the graphs of the regularized solution vδi n·, t, i 1, 2, 3 and
n 10.
We have in Figure 2 the graphs of the regularized solution vδi n·, t, i 4, 5, 6 and
n 10.
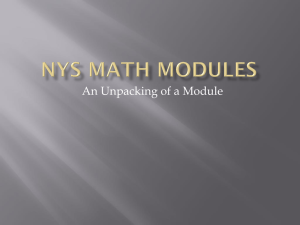
We have in Figure 3 the graphs of the exact solution u·, t and of the regularized
solution vδi n·, t, i 7, 8 and n 10.
Now, Figure 4 can represent visually the exact solution and regularized solutions
corresponding to δi , i 1, . . . , 8 at initially time t 0.
Notice that, in Figure 4, the curve number 0 expressing the exact solution is
indistinguishable from the curve number i expressing the regularized solution corresponding
to δi , i 6, 7, 8.
Remark 3.1. From 1.7 and 3.5, we obtain the exact solution corresponding to the measured
data gδ x:
wx, t ∞
k1
wk t sinkx,
3.9
International Journal of Mathematics and Mathematical Sciences
The regularized solution
(eps = 0.1)
0.2
0.15
0.1
0.05
0
−0.05
−0.1
−0.15
−0.2
3
2
x
1
0
0
17
The regularized solution
(eps = 0.001)
The regularized solution
(eps = 0.01)
0.2
0.15
0.1
0.05
0
−0.05
−0.1
−0.15
−0.2
3
1
0.8
0.6
0.4
0.2 t
1
0.8
0.6
0.4
0.2
t
2
x
1
0
a
0
0.25
0.2
0.15
0.1
0.05
0
−0.05
−0.1
−0.15
−0.2
−0.25
3
2
x
1
0
b
0
1
0.8
0.6
0.4
0.2
t
c
Figure 1: The regularized solutions corresponding to δi , i 1, 2, 3.
The regularized solution
(eps = 1e − 005)
The regularized solution
(eps = 0.0001)
The regularized solution
(eps = 1e − 010)
1.5
1
0.8
0.6
0.4
0.2
0
−0.2
−0.4
−0.6
−0.8
−1
3
2
x
1
0
0
0.8
0.6
0.4
t
0.2
1.5
1
1
0.5
0.5
0
0
−0.5
−0.5
−1
−1
−1.5
3
−1.5
3
1
2
x
1
0
a
0
0.8
0.6
0.4
t
0.2
1
2
x
1
0
b
0
0.6
0.4
t
0.2
0.8
1
c
Figure 2: The regularized solutions corresponding to δi , i 4, 5, 6.
where
wk t ek
fk ws gδ,k
2
π
2
π
2
λT −λt
π
gδ,k −
T
ek
2
λs−λt
fk wsds,
t
fx, s, wx, s sinkxdx,
0
π
0
gδ x sinkxdx.
3.10
18
International Journal of Mathematics and Mathematical Sciences
The regularized solution
(eps = 1e − 020)
The regularized solution
(eps = 1e − 050)
The exact solution
1.5
1.5
1
1
1
0.5
0.5
0.5
1.5
0
0
0
−0.5
−0.5
−0.5
−1
−1
−1
−1.5
3
−1.5
3
−1.5
3
2
x
1
0
0
0.8
0.6
0.4
t
0.2
1
2
x
1
0
a
0
0.8
0.6
0.4
t
0.2
1
2
x
1
0
b
0
0.8
0.6
0.4
t
0.2
1
c
Figure 3: The regularized solutions corresponding δi , i 7, 8 and the exact solution.
0.5
0.4
0.3
0.2
0.1
0
−0.1
−0.2
−0.3
−0.4
−0.5
0
0.5
1
1.5
2
2.5
3
3.5
Figure 4: The exact solution and the regularized solutions corresponding to δi , i 1, . . . , 8 at initial time
t 0.
Now, we cannot calculate the formula 3.9 exactly we need to find fk ws while
we have not known w yet. From Theorem 2.2, we use the iteration for 3.9 at initial time
t 0 as follows:
wnω, 0 ∞
k1
wk nx, 0 sinkx,
3.11
International Journal of Mathematics and Mathematical Sciences
19
Table 2
δ
δ1
δ2
δ3
δ4
δ5
δ6
δ7
δ8
wδi 5·, 0 − u·, 02
1.1856e 031
1.0e 031
1.0e 031
1.0e 031
1.0e 031
1.0e 031
1.0e 031
1.0e 031
10−1
10−2
10−3
10−4
10−5
10−10
10−20
10−50
where
1
2
wk nx, 0 exp 2k gδ,k − exp k2 s2 s fk wn − 1sds,
0
gδ,k 2
π
π
gδ x sinkxdx,
3.12
0
w1x, 0 1 δ sinx cosx.
Then we get the error in the Table 2.
We can see that the error wδi 5·, 0 − u·, 02 is very large. Therefore, the problem is
ill-posed and a regularization is necessary.
Acknowledgment
All authors were supported by the National Foundation for Science and Technology
Development NAFOSTED.
References
1 Z. Qian, C.-L. Fu, and R. Shi, “A modified method for a backward heat conduction problem,” Applied
Mathematics and Computation, vol. 185, no. 1, pp. 564–573, 2007.
2 R. E. Ewing, “The approximation of certain parabolic equations backward in time by Sobolev
equations,” SIAM Journal on Mathematical Analysis, vol. 6, pp. 283–294, 1975.
3 X.-L. Feng, Z. Qian, and C.-L. Fu, “Numerical approximation of solution of nonhomogeneous backward heat conduction problem in bounded region,” Mathematics and Computers in Simulation, vol. 79,
no. 2, pp. 177–188, 2008.
4 C.-L. Fu, X.-T. Xiong, and Z. Qian, “Fourier regularization for a backward heat equation,” Journal of
Mathematical Analysis and Applications, vol. 331, no. 1, pp. 472–480, 2007.
5 D. N. Hào, “A mollification method for ill-posed problems,” Numerische Mathematik, vol. 68, no. 4, pp.
469–506, 1994.
6 A. Hasanov and J. L. Mueller, “A numerical method for backward parabolic problems with nonselfadjoint elliptic operators,” Applied Numerical Mathematics, vol. 37, no. 1-2, pp. 55–78, 2001.
7 D. D. Trong, P. H. Quan, and N. H. Tuan, “A quasi-boundary value method for regularizing nonlinear
ill-posed problems,” Electronic Journal of Differential Equations, vol. 2009, no. 109, pp. 1–16, 2009.
8 D. T. Dang and H. T. Nguyen, “Regularization and error estimates for nonhomogeneous backward
heat problems,” Electronic Journal of Differential Equations, vol. 2006, no. 4, pp. 1–10, 2006.
20
International Journal of Mathematics and Mathematical Sciences
9 I. V. Mel’nikova and A. I. Filinkov, The Cauchy Problem. Three Approaches, vol. 120 of Monograph and
Surveys in Pure and Applied Mathematics, Chapman & Hall, London, UK, 2001.
10 D. D. Trong and N. H. Tuan, “A nonhomogeneous backward heat problem: regularization and error
estimates,” Electronic Journal of Differential Equations, vol. 2008, no. 33, pp. 1–14, 2008.
11 D. D. Trong, P. H. Quan, T. V. Khanh, and N. H. Tuan, “A nonlinear case of the 1-D backward heat
problem: regularization and error estimate,” Zeitschrift für Analysis und ihre Anwendungen, vol. 26, no.
2, pp. 231–245, 2007.
12 P. H. Quan, D. D. Trong, L. M. Triet, and N. H. Tuan, “A modified quasi-boundary value method for
regularizing of a backward problem with time-dependent coefficient,” Inverse Problems in Science and
Engineering, vol. 19, no. 3, pp. 409–423, 2011.
13 M. Lees and M. H. Protter, “Unique continuation for parabolic differential equations and inequalities,” Duke Mathematical Journal, vol. 28, pp. 369–382, 1961.
Advances in
Operations Research
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Advances in
Decision Sciences
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Mathematical Problems
in Engineering
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Journal of
Algebra
Hindawi Publishing Corporation
http://www.hindawi.com
Probability and Statistics
Volume 2014
The Scientific
World Journal
Hindawi Publishing Corporation
http://www.hindawi.com
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
International Journal of
Differential Equations
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Volume 2014
Submit your manuscripts at
http://www.hindawi.com
International Journal of
Advances in
Combinatorics
Hindawi Publishing Corporation
http://www.hindawi.com
Mathematical Physics
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Journal of
Complex Analysis
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
International
Journal of
Mathematics and
Mathematical
Sciences
Journal of
Hindawi Publishing Corporation
http://www.hindawi.com
Stochastic Analysis
Abstract and
Applied Analysis
Hindawi Publishing Corporation
http://www.hindawi.com
Hindawi Publishing Corporation
http://www.hindawi.com
International Journal of
Mathematics
Volume 2014
Volume 2014
Discrete Dynamics in
Nature and Society
Volume 2014
Volume 2014
Journal of
Journal of
Discrete Mathematics
Journal of
Volume 2014
Hindawi Publishing Corporation
http://www.hindawi.com
Applied Mathematics
Journal of
Function Spaces
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Optimization
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014