Document 10455031
advertisement

Hindawi Publishing Corporation
International Journal of Mathematics and Mathematical Sciences
Volume 2012, Article ID 375264, 28 pages
doi:10.1155/2012/375264
Research Article
Surfaces of Constant Curvature in
the Pseudo-Galilean Space
Željka Milin Šipuš1 and Blaženka Divjak2
1
Department of Mathematics, Faculty of Science, University of Zagreb, Bijenička Cesta 30,
10 000 Zagreb, Croatia
2
Faculty of Organization and Informatics, University of Zagreb, Pavlinska 2, 42 000 Varaždin, Croatia
Correspondence should be addressed to Željka Milin Šipuš, milin@math.hr
Received 16 May 2012; Accepted 1 July 2012
Academic Editor: Ram U. Verma
Copyright q 2012 Ž. Milin Šipuš and B. Divjak. This is an open access article distributed under
the Creative Commons Attribution License, which permits unrestricted use, distribution, and
reproduction in any medium, provided the original work is properly cited.
We develop the local theory of surfaces immersed in the pseudo-Galilean space, a special type
of Cayley-Klein spaces. We define principal, Gaussian, and mean curvatures. By this, the general
setting for study of surfaces of constant curvature in the pseudo-Galilean space is provided. We
describe surfaces of revolution of constant curvature. We introduce special local coordinates for
surfaces of constant curvature, so-called the Tchebyshev coordinates, and show that the angle
between parametric curves satisfies the Klein-Gordon partial differential equation. We determine
the Tchebyshev coordinates for surfaces of revolution and construct a surface with constant
curvature from a particular solution of the Klein-Gordon equation.
1. Introduction
Study of differential geometry of curves and surfaces in Euclidean, as well as in other nonEuclidean ambient spaces, has a long history. Classical context of the Euclidean space is a
source of results which could be transferred to some other geometries. One way of defining
new geometries is through Cayley-Klein spaces. They are defined as projective spaces Pn R
with an absolute figure, a subset of Pn R consisting of a sequence of quadrics and planes 1.
Projectivities of the projective space Pn R which leave invariant the absolute figure define
the subgroup of projectivities called the group of motions of a Cayley-Klein space. By means
of the absolute figure, metric relations are also defined and they are invariant under the group
of motions.
In three-dimensional projective space P3 R various types of Cayley-Klein spaces
can be defined, such as elliptic and hyperbolic space, Euclidean and pseudo-Euclidean
2
International Journal of Mathematics and Mathematical Sciences
Minkowski space, simple and double isotropic space, Galilean and pseudo-Galilean space,
and quasielliptic and quasihyperbolic space. General theory of differential geometry of
curves and surfaces in Cayley-Klein spaces can be found in 1. Foundations of these areas in
the pseudo-Galilean space were established in 2, as well as in the papers 3–7. Geometry
of the Galilean space G3 was studied in 8–11. The four-dimensional Galilean space appears
in connection with classical Newtonian mechanics, where first coordinate describes time and
other three coordinates are space coordinates.
The main interest of this paper is to develop the local theory of surfaces in the pseudoGalilean space and to study surfaces of constant curvatures. As in the Minkowski space
12, two classes of surfaces are introduced, spacelike and timelike surfaces, and for them
the Gaussian curvature is defined. The obtained results are compared to the well-known
results in the Euclidean and Minkowski geometry. The results can easily be transferred to the
Galilean space. Furthermore, we define the Tchebyshev coordinates on a surface and show
that the asymptotic lines form the Tchebyshev net if and only if this surface is a spacelike
surface of constant negative curvature or timelike surface of constant positive curvature.
We study the angle between the Tchebyshev curves on a surface of constant curvature and
show that the angle satisfies the Klein-Gordon partial differential equation. In this respect,
the Klein-Gordon equation plays the analogous role in the pseudo-Galilean space as the
sine-Gordon equation in Euclidean space. We construct a surface with constant Gaussian
curvature from a known solution of a Klein-Gordon equation. Similar problem is treated in
13 for the Galilean space and in wider context in 14 by means of Cartan frames.
2. Preliminaries
The absolute figure of the pseudo-Galilean space is the ordered triple {ω, f, I}, where ω is
the ideal absolute plane in the real three-dimensional projective space P3 R, f the line
absolute line in ω, and I the fixed hyperbolic involution of points of f. Homogeneous
coordinates in G13 are introduced in such a way that the absolute plane ω is given by x0 0,
the absolute line f by x0 x1 0, and the hyperbolic involution by 0 : 0 : x2 : x3 → 0 :
0 : x3 : x2 . The last condition is equivalent to the requirement that the conic x22 − x32 0
is the absolute conic. Metric relations are introduced with respect to the absolute figure. In
affine coordinates defined by x0 : x1 : x2 : x3 1 : x : y : z, distance between points
Pi xi , yi , zi , i 1, 2, is defined by
⎧
− x1 |,
⎪
⎨|x
2
dP1 , P2 2
2
⎪
⎩ y2 − y1 − z2 − z1 ,
x2 ,
if x1 /
if x1 x2 .
2.1
The group of motions of G13 is a six-parameter group given in affine coordinates by
x a x,
y b cx y cosh ϕ z sinh ϕ,
2.2
z d ex y sinh ϕ z cosh ϕ.
It leaves invariant the absolute figure as well as the pseudo-Galilean distance 2.1 of points.
International Journal of Mathematics and Mathematical Sciences
3
In the pseudo-Galilean space, a vector is called isotropic if it is of
the form 0, y, z.
Among these vectors, there are also vectors with supplementary norm |y2 − z2 | equal to
zero; they are called lightlike vectors. Isotropic vectors satisfying y2 − z2 > 0 are said to be
spacelike vectors and vectors satisfying y2 − z2 < 0 timelike vectors. A plane of the form x const. is called a pseudo-Euclidean plane since its induced geometry is pseudo-Euclidean,
i.e., Minkowski plane geometry, otherwise it is called isotropic since its induced geometry
is isotropic, i.e., Galilean plane geometry. In the pseudo-Euclidean plane distance between
points Pi , i 1, 2, given by their affine coordinates Pi xi , yi is defined by
dP1 , P2 2 x2 − x1 2 − y2 − y1 ,
2.3
while in the isotropic plane
|x2 − x1 |,
dP1 , P2 y2 − y1 ,
x2 ,
if x1 /
if x1 x2 .
2.4
The pseudo-Galilean space G13 can be also regarded as a Cayley-Klein space equipped
with the projective metric of signature 0, 0, , −, as explained in 15. According to the
3
and also called the
description of the Cayley-Klein spaces in 1, it is denoted by P11|001
Galilean space of index 1.
3. The Gaussian Curvature of Surfaces in G13
We will treat a Cr -surface, r ≥ 2, as a subset Φ ⊂ G13 for which there exists an open subset D of
R2 and Cr -mapping x : D → G13 satisfying Φ xD. A Cr -surface Φ ⊂ G13 is called regular if
x is an immersion and simple if x is an embedding. It is admissible if it does not have pseudoEuclidean tangent planes. Let us denote x xxu1 , u2 , yu1 , u2 , zu1 , u2 , x,i ∂x/∂ui ,
y,i ∂y/∂ui , z,i ∂z/∂ui , i 1, 2. Then a surface is admissible if and only if x,i / 0, for some
i 1, 2. If we assume
x,1 y,1 / 0,
x,2 y,2 3.1
then such a surface is admissible and can be locally expressed in the form
z z x, y .
3.2
Let Φ ⊂ G13 be a regular admissible surface. We define a side tangential vector by
σ
1
x,1 x,2 − x,2 x,1 .
W
3.3
4
International Journal of Mathematics and Mathematical Sciences
The vector σ is a vector in a tangent plane and we assume that it is not an isotropic lightlike
vector, but a unit isotropic spacelike or timelike vector. The function W, W > 0, defined by
2
W x,1 y,2 − x,2 y,1 − x,1 z,2 − x,2 z,1 2 ,
3.4
is equal to the pseudo-Galilean norm of the isotropic vector x,1 x,2 − x,2 x,1 . In particular, in the
parametrization 3.2 we have
σ
1 0, 1, z,y ,
W
W
1 − z2,y .
3.5
In the following, we will not consider surfaces with W 0, that is, surfaces having lightlike
side tangential vectors lightlike surfaces.
In a tangent plane in a point P0 of a regular admissible surface, there is a unique
isotropic direction defined by the condition x,1 du1 x,2 du2 0. This isotropic line in a tangent
plane in a point P0 of the surface meets the absolute line f in a point S. If we denote by S⊥ a
point on f obtained from S by the hyperbolic involution I, then a line connecting P0 and S⊥
is perpendicular to the tangent plane. Therefore a unit surface normal field is defined by
N
1 0, x,1 z,2 − x,2 z,1 , x,1 y,2 − x,2 y,1 .
W
3.6
We introduce a pseudo-Galilean cross-product in the following way:
0 −e2 e3 a ×G b a1 a2 a3 ,
b b b 1
2
3
3.7
where e2 0, 1, 0, e3 0, 0, 1, e2 is a unit spacelike, and e3 is a unit timelike vector, a a1 , a2 , a3 , b b1 , b2 , b3 . Now we can write
N
1
x1 ×G x2
W
3.8
which for 3.2 turns to N 1/W0, zy , 1. Furthermore, we can notice that the pseudoGalilean cross product can be defined by means of the pseudo-Galilean scalar product so that
a ×G b is the isotropic vector defined by the relation
a ×G b · c − deta, b, c,
3.9
for any vector c. By ∼ above a vector, the projection of a vector on the pseudo-Euclidean yzplane is denoted and by · the pseudo-Euclidean scalar product in the same plane, y1 , y2 ·
z1 , z2 y1 z1 − y2 z2 .
Obviously the following proposition holds.
International Journal of Mathematics and Mathematical Sciences
5
Proposition 3.1. The side tangential vector σ and the normal vector N are unit isotropic vectors that
satisfy
σ · N 0,
N2 : ±1,
3.10
σ 2 −.
Since the normal vector field satisfies N · N ±1, we distinguish two basic types of
admissible surfaces: spacelike surfaces having timelike surface normals −1 and timelike
surfaces having spacelike normals 1. A surface is spacelike if x,1 x,2 − x,2 x,1 2 x,1 y,2 −
x,2 y,1 2 − x,1 z,2 − x,2 z,1 2 > 0 in all of its points, timelike otherwise. In the parametrization
3.2 a surface is spacelike if 1 − z2,y > 0.
The first fundamental form of a surface is induced from the metric of the ambient space
G13
ds2 x,1 du1 x,2 du2 2 δx,1 du1 x,2 du2 2 ,
3.11
where
δ
0,
1,
if direction du1 : du2 is nonisotropic,
if direction du1 : du2 is isotropic.
3.12
We introduce the fundamental coefficients
gi x,i ,
hij x,i · x,j ,
i, j 1, 2,
3.13
by which the first fundamental form can be written as
2
ds2 g1 du1 g2 du2 δ h11 du21 2h12 du1 du2 h22 du22 .
3.14
Notice again that the indices i or ij on variables denote different symbols, whereas indices, i
or, i, j denote the partial derivatives with respect to the ith and jth parameter. Furthermore
hij hji , gi,j gj,i , i 1, 2.
Now the function W has the form
2
W 2 − g1 x,2 − g2 x,1
− g12 h22 − 2g1 g2 h12 g22 h11 > 0,
3.15
and the surface is spacelike if g12 h22 − 2g1 g2 h12 g22 h11 > 0, timelike otherwise. We can notice
that if a surface is spacelike, both parts of the first fundamental form, ds21 g1 du1 g2 du2 2
and
ds22 h11 du21 2h12 du1 du2 h22 du22 −
W2 2
du2 ,
g12
g1 /
0,
3.16
6
International Journal of Mathematics and Mathematical Sciences
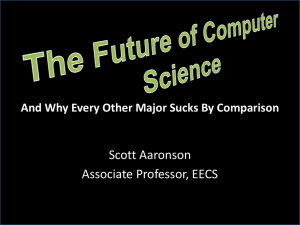
Figure 1: Lightlike planes, a spacelike and a timelike hyperbolic sphere.
are positive definite, while for the timelike surfaces, the form ds21 is positive definite whereas
ds22 is negative definite. We have assumed here, without loss of generality, g1 / 0. In the latter
case this means that the matrix of the first fundamental form
ds21 0
0 ds22
3.17
is indefinite, analogously to the timelike surfaces in the Minkowski space R31 12.
In particular, for the parametrization 3.2 we have
ds2 dx2 δ 1 − z2,y dy2 ,
3.18
since dx 0 when δ 1.
Example 3.2. Hyperbolic cylinders z2 − y2 R2 y2 − z2 R2 are surfaces which are
everywhere spacelike timelike. They are spheres of the space G13 , called hyperbolic spheres.
Planes y2 − z2 0 are everywhere lightlike surfaces, see Figure 1.
The Gaussian curvature of a surface is defined by means of the coefficients of the
second fundamental form Lij , i, j 1, 2, which are the normal components of x,i,j , i 1, 2,
respectively. If we put
x,i,j 2
k1
then the following proposition follows.
Γkij x,k Lij N,
3.19
International Journal of Mathematics and Mathematical Sciences
7
Proposition 3.3. One has
Lij 1
1
g1 x,i,j − gi,j x,1 · N g2 x,i,j − gi,j x,2 · N,
g1
g2
3.20
Proof. The first coordinate of 3.19 is given by
gi,j Γ1ij g1 Γ2ij g2 .
3.21
Under assumption g1 /
0 we have
Γ1ij gi,j − Γ2ij g2
g1
3.22
,
and therefore 3.19 turns to
x,i,j 1
gi,j x,1 WΓ2ij σ Lij N.
g1
3.23
From 3.23 it follows that g1 x,i,j − gi,j x,1 is an isotropic vector equal to WΓ2ij σ Lij g1 N. The
coefficients Lij are obtained by scalar multiplication by N.
In particular, for the parametrization 3.2 we have
L11 1
1
0, 0, z,x,x · 0, z,y , 1 − z,x,x ,
W
W
L12 −
1
z,x,y ,
W
L22 −
1
z,y,y .
W
3.24
Functions Γkij defined by 3.19 are called the Christoffel symbols of the second kind.
Now we can prove the following proposition.
Proposition 3.4. Derivatives of the side tangential vector σ and the normal vector N are given by
σ,i :
∂
1 σ
g1 Li2 − g2 L1i N.
∂ui
W
1 g1 Li2 − g2 L1i σ,
N,i W
3.25
i 1, 2.
Proof. Vectors σ,i and N,i are isotropic vectors and therefore can be expressed as linear
combinations of σ and N. Since N2 : ±1, σ 2 − it follows N · N,i 0, σ · σ,i 0.
Also σ,i · N σ · N,i 0. Having a pseudoscalar product in the isotropic plane, we conclude
σ,i fN, N,i fσ, for a Cr -function f, r ≥ 1.
Now, from the definition of σ it follows that
σ,i g1 W
,i
x,2 −
g2 W
,i
x,1 g1
g2
x,2,i −
x,1,i .
W
W
3.26
8
International Journal of Mathematics and Mathematical Sciences
By using 3.19 it is easy to show that the component by N of σ,i is equal to 1/Wg1 Li2 −
g2 L1i .
We will define the Gaussian curvature K as the product of principal curvatures, the
normal curvatures in the principal direction. The principal directions are tangent directions
of a curve c on a surface along which the normal field of the surface determines developable
ruled surface, that is, detċ, N, Ṅ 0. This property characterizes principal directions in
Euclidean space 16.
Proposition 3.5. The principal directions on a regular admissible surface Φ are given by
g1 du1 g2 du2 0
3.27
g2 L11 − g1 L12 du1 g2 L12 − g1 L22 du2 0.
3.28
(the isotropic direction) and
Proof. Let ct xt, yt, zt be a curve on a surface Φ. Since N, Ṅ are isotropic vectors,
N
˙ 0
detċ, N, Ṅ 0 if and only if ẋ x,1 du1 x,2 du2 0 which gives 3.27 or detN,
which by using Proposition 3.4 gives 3.28.
The principal curvature is given in the next proposition.
Proposition 3.6. The principal curvature k1 for the direction 3.27 is given by
k1 −
L11 g22 − 2L12 g1 g2 L22 g12
W2
3.29
and the principal curvature k2 for the direction 3.28 by
k2 L11 L22 − L212
L11 g22 − 2L12 g1 g2 L22 g12
.
3.30
Proof. Principal curvatures are calculated from k II/I, where II L11 du21 2L12 du1 du2 L22 du22 is the second and I ds2 the first fundamental form. Therefore, for the direction 3.27
we have
k1 L11 du21 2L12 du1 du2 L22 du22
h11 du21 2h12 du1 du2 h22 du22
L11 g22 − 2L12 g1 g2 L22 g12
L11 g22 − 2L12 g1 g2 L22 g12
−
W2
h11 g22 − 2h12 g1 g2 h22 g12
3.31
International Journal of Mathematics and Mathematical Sciences
9
and for the direction 3.28
k2 L11 du21 2L12 du1 du2 L22 du22
2
g1 du1 g2 du2
L11 L22 − L212
L11 g22 − 2L12 g1 g2 L22 g12
3.32
.
The Gaussian curvature of a regular admissible surface is defined by
K k1 k2 −
L11 L22 − L212
W2
3.33
or for 3.2
K −
z,x,x z,y,y − z2,x,y
W4
.
3.34
The mean curvature of a surface is defined by
H−
k
2
1
2
g
,
L
−
2g
g
L
g
L
11
1
2
12
22
2
1
2
2W 2
3.35
and for 3.2 it turns to
H
z,y,y .
2W 3
3.36
Such definition of H is motivated by Proposition 3.7
The third fundamental form III is introduced in the analogous way as in Euclidean
space. Since N is a unit isotropic field along Φ, the end points of its associated position vectors
lie on a hyperbolic unit sphere. More precisely, if N is a timelike spacelike field, that is, if a
surface is spacelike timelike, then the end points of associated position vectors of N lie on a
unit spacelike sphere z2 − y2 1 unit timelike sphere y2 − z2 1, see Figure 1. The obtained
mapping is called the Gauss map the spherical map; the set of all end points of N is called
the spherical image of a surface. The third fundamental form is the first fundamental form of
the spherical image. Therefore it is defined by
III dN · dN N,1 du1 N,2 du2 2
N2,1 du21 2N,1 · N,2 du1 du2 N2,2 du22 ,
3.37
10
International Journal of Mathematics and Mathematical Sciences
where
2 2
2 2
g
,
L
−
2g
g
L
L
g
L
1
2
11
12
2
11
1
12
W2
N,1 · N,2 − 2 g22 L11 L12 − g1 g2 L11 L22 L212 g12 L12 L22 ,
W
N2,2 − 2 g22 L212 − 2g1 g2 L12 L22 g12 L222 .
W
N2,1 −
3.38
Particularly, for 3.2 we have N 1/W0, z,y , 1, and
2
2 z,y
2
1 1
−
III − d
−d
dx
z
dy
.
z
,x,y
,y,y
W
W
W4
3.39
By a simple computation we can notice that the following relation holds.
Proposition 3.7. One has K I − 2H II III 0.
Theorem 3.8. Minimal surfaces in a pseudo-Galielan space G13 are ruled conoidal surfaces, that is,
they are cones with vertices on the absolute line or ruled surfaces with the absolute line as a director
curve in infinity.
Proof. We define a normal section in a point of a surface as a plane curve obtained as a section
of the surface by a pseudo-Euclidean plane. It can be shown that the curvature of a normal
section parametrized by the arc-length as a curve in a pseudo-Euclidean plane is κ∗ k1 .
This is obtained from the fact that, for a curve ct xut, vt parametrized by the arc
length, tangent vector field c t is equal to the side tangential field σ, and therefore c t k1 N.
Furthermore, κ∗ 0 if and only if a curve is a line in the pseudo-Euclidean plane, and
therefore ct is an isotropic line in G13 . Since H k1 /2, the assertion follows.
4. Surfaces of Revolution
In the pseudo-Galilean space G13 there are two types of rotations: pseudo-Euclidean rotations
given by the normal form
x x,
y y cosh t z sinh t,
z y sinh t z cosh t
4.1
International Journal of Mathematics and Mathematical Sciences
11
and isotropic rotations with the normal form
xt x bt,
t2
yt y xt b ,
2
4.2
zt z,
where t ∈ R and b const > 0.
The trajectory of a single point under a pseudo-Euclidean rotation is a pseudoEuclidean circle i.e., a rectangular hyperbola
x const.,
y2 − z2 R2 ,
R ∈ R.
4.3
The invariant R is the radius of the circle. Pseudo-Euclidean circles intersect the absolute line
f in the fixed points of the hyperbolic involution F1 , F2 . There are three kinds of pseudoEuclidean circles: circles of real radius, of imaginary radius, and of radius zero. Circles of
real radius are timelike curves having timelike tangent vectors and of imaginary radius
spacelike curves having spacelike tangent vectors.
The trajectory of a point under the isotropic rotation is an isotropic circle whose normal
form is
z const.,
y
x2
.
2b
4.4
The invariant b is the radius of the circle. The fixed line of the isotropic rotations 4.2 is the
absolute line f.
By rotating a nonisotropic curve u → fu, gu, 0, g > 0, around the x-axis by
pseudo-Euclidean rotations, we obtain a timelike surface
xu, v fu, gu cosh v, gu sinh v ,
4.5
and by rotating a curve u → fu, 0, gu, g > 0, around the x-axis, we obtain a spacelike
surface
xu, v fu, gu sinh v, gu cosh v .
4.6
The Gaussian curvature of these surfaces is given by K −g /f 1/f g or if we
assume that the rotated curve is parametrized by the arc length u, u → u, gu, 0 u →
u, 0, gu by
K −
g .
g
4.7
12
International Journal of Mathematics and Mathematical Sciences
Therefore, surfaces with constant curvature K0 are described by the ordinary differential equation
g K0 g 0,
K0 const.
4.8
Their implicit equation is
y2 − z2 g 2 x
4.9
ds2 du2 − δg 2 udv2 .
4.10
and the first fundamental form
The following theorem holds.
Theorem 4.1. The profile curve of surfaces of revolution of constant Gaussian curvature in pseudoGalilean space is as follows.
1 If K −1/a2 (i.e., K 1/a2 for spacelike surfaces and K −1/a2 for timelike surfaces),
then the general solution of the differential equation 4.8 is
gu A sinh
u
a
B cosh
u
a
,
A, B, a ∈ R.
4.11
2 If K 0, then the general solution of the differential equation 4.8 is
gu Au B,
A, B ∈ R.
4.12
3 If K 1/a2 , then the general solution of the differential equation 4.8 is
gu A sin
u
a
B cos
u
a
,
A, B, a ∈ R.
4.13
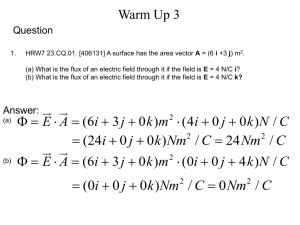
Examples of these surfaces are given in Figures 2 and 3. Notice that if K 0, then the
profile curve is a line 4.12. Among these surfaces there are also hyperbolic spheres A 0,
2
y2 − z2 ±B2 , see Figures 1 and 4. Cones A / 0, y2 − z2 ±Ax B are also surfaces of
revolution with vanishing curvature.
Next we consider the isotropic rotations. By rotating an isotropic curve u →
0, fu, gu about the z-axis by isotropic rotation, we obtain a surface
v2
v, fu , gu ,
2b
xu, v b
/ 0.
4.14
Let us assume that the rotated curve is parametrized by the arc length
f − g −,
2
2
4.15
International Journal of Mathematics and Mathematical Sciences
13
Figure 2: A spacelike timelike surface of revolution with positive negative curvature.
Figure 3: A spacelike timelike surface of revolution with negative positive curvature.
that is, the curve is spacelike its tangent vectors are spacelike, −1 or timelike its tangent
vectors are timelike, 1. By a simple calculation it can be shown that by revolving a
spacelike timelike curve a spacelike timelike surface is obtained. From 4.15 it follows
g f /g f , and therefore, the following expression for K is obtained regardless of the
type of the surface:
K−
f K0 const .
b
4.16
14
International Journal of Mathematics and Mathematical Sciences
Figure 4: A spacelike hyperbolic sphere K 0.
Therefore, the profile curve of a surface with constant curvature is described by the ordinary
differential equation
f −bK0 .
4.17
Theorem 4.2. The profile curve u → 0, fu, gu of a surface with constant curvature obtained
by isotropic rotations is given by
−bK0 u2
Au B, A, B ∈ R,
2
1
gu −
A − bK0 u A − bK0 u2 − 1 − Arccosh A − bK0 u C ,
2bK0
fu 4.18
for a spacelike surface and
gu −
1
A − bK0 u A − bK0 u2 1 Arcsinh A − bK0 u C
2bK0
4.19
and for a timelike surface, where C ∈ R is a constant.
If K0 0, then
fu Au B,
gu Cu D,
A, B, C, D ∈ R,
A2 − C2 −
4.20
which implies that the profile curve is a line and obtained surface a parabolic sphere xu, v bv, Au B bv2 /2, Cu D (Figure 5).
International Journal of Mathematics and Mathematical Sciences
15
Figure 5: A spacelike parabolic sphere K 0.
We can notice that this situation appears much more simpler than the same situation
in the Euclidean space, where the expressions of the profile curves involve elliptic integrals.
Now we treat surfaces of constant mean curvature. The mean curvature H of the
surfaces 4.5, 4.6 is given by
H−
1
.
2
2g
2W
4.21
Therefore the following theorem holds.
Theorem 4.3. There are no minimal surfaces of revolution 4.5, 4.6. Surfaces with constant mean
curvature H /
0 are hyperbolic timelike, respectively, spacelike spheres obtained by rotating a line
u, −1/2H, 0, resp., u, 0, −1/2H.
The mean curvature H of a surface 4.14 is given by
H−
f f .
−
2 g
2 f 2 4.22
Theorem 4.4. The profile curve of a surface of revolution of constant mean curvature obtained by
isotropic rotations (Figure 6) in pseudo-Galilean space is as follows.
1 If H 0, then fu Au B, gu A1 u B1 , A, B, A1 , B1 , A2 − A21 −, that is, the
surface is generated by an isotropic rotation of an isotropic line (a parabolic sphere).
2 If H /
0, then for a spacelike surface ( −1)
fu 1
sinhh0 u c c1 ,
h0
gu 1
coshh0 u c c2
h0
4.23
gu 1
sinhh0 u c −2,
h0
4.24
and for a timelike surface 1
fu 1
coshh0 u c c1 ,
h0
16
International Journal of Mathematics and Mathematical Sciences
Figure 6: A surface with constant mean curvature obtained by an isotropic rotation.
where h0 ±2H const, c, c1 , c2 const. A surface is obtained by an isotropic rotation
of a pseudo-Euclidean circle.
5. Klein-Gordon Equation and the Tchebyshev Coordinates in G13
In the context of classical surface theory in the three-dimensional Euclidean space, the
sine-Gordon equation has the geometrical interpretation in terms of surfaces with negative
constant Gaussian curvature. This is shown by parametrizing a surface by coordinates that
satisfy
E G 1,
F cos ϕ,
5.1
where E, F, and G are coefficients of the first fundamental form i.e., by Tchebyshev
coordinates. Then Theorema Egregium implies
ϕ,u,v −K sin ϕ.
5.2
In particular, for a surface with constant negative curvature K −1/m2 , the previous
equation turns to the sine-Gordon equation for the angle ϕ between parametric curves
ϕ,u,v 1
sin ϕ.
m2
5.3
Similar results hold in a three-dimensional pseudo-Riemannian manifold of constant
curvature e.g., Minkowski space R13 . The angle between curves of the Tchebyshev net on
a spacelike timelike surface of constant negative positive curvature satisfies the sineGordon equation or its hyperbolic analogue sinh-Gordon equation 17.
Our aim is to introduce the analogue of the Tchebyshev coordinates on a surface in the
pseudo-Galilean space and to establish a partial differential equation satisfied by the angle
between the parametric curves. In order to be able to consider the angle between parametric
International Journal of Mathematics and Mathematical Sciences
17
curves of a surface, it is assumed that parametric curves are non-isotropic curves, that is,
0, g 2 /
0.
g1 /
We proceed with the following definition.
Definition 5.1. Tchebyshev net on a surface is the net of parametric curves for which the first
fundamental coefficients satisfy g1 g2 1, h11,2 h22,1 .
Notice that according to our notation we have hii,j ∂hii /∂uj , i, j 1, 2.
The first condition from the definition implies that the parametric curves of this net
are parametrized by the arc length. The side tangential vector in these coordinates is given by
σ 1/Wx,2 − x,1 , where W 2 −x,2 − x,1 2 . Furthermore, since
h11,2 ∂x2,1
∂x2,2
2x,2 · x,1,2 ,
5.4
1
1
x,2 − x,1 · x,1,2 h22,1 − h11,2 0.
W
2W
5.5
∂v
2x,1 · x,1,2 ,
h22,1 ∂u
it follows that
σ · x,1,2 Such definition of the Tchebyshev coordinates is motivated by the following theorem whose
counterpart holds in Euclidean space. For the analogous result in simply isotropic space I31
see 18.
Theorem 5.2. Asymptotic curves on a Cr -surface Φ in G13 , r ≥ 3, form the Tchebychev net if and only
if Φ is a spacelike surface with constant negative curvature or timelike surface with constant positive
curvature.
Proof. First notice that on spacelike surfaces with negative curvature and timelike surface
with positive curvature there are two families of real asymptotic curves, due to the fact that
the equation for the asymptotic curves II 0 has two real solutions.
Proof follows from the analogues of the Gauss and Codazzi-Mainardi equations for
surfaces in the pseudo-Galilean space G13 . They are obtained in the following way.
Let x xxu1 , u2 , yu1 , u2 , zu1 , u2 be a parametrization of Φ, and let N denote
its unit normal field. Multiplying 3.23 by σ and analogous expression obtained when
0, it can be shown that the Christoffel symbols of the second kind defined
assuming g2 /
by 3.19 are given by
g2 x,i,j − gi,j x,2 · σ,
W
Γ2ij −
g1 x,i,j − gi,j x,1 · σ.
W
Γ1ij 5.6
18
International Journal of Mathematics and Mathematical Sciences
Under assumption x,i,j,k x,i,k,j the following is obtained:
Lij,k − Lik,j n
m
Γnij Lnk
−
Γm
− Γm
ij
ik ,j Γnik Lnj
N
,k
n m
m
Γnij Γm
nk − Γik Γnj g g
n
5.7
n
Lij Lnk − Lik Ljn
x,m 0,
where g 1 g2 /W, g 2 −g1 /W. We can notice that the previous formula differs from its
analogue in the Galilean space 10 in the sign of the term g m g n Lij Lnk − Lik Ljn . This is a
consequence of the formulas for Ni in Proposition 3.4 with the opposite sign than in the
Galilean space.
The component by x,m gives the Gauss integrability equation
− Γm
Γm
ij
ik ,j ,k
−
n
m n
g g
n m
Γnij Γm
nk − Γik Γnj
Lij Lnk − Lik Ljn ,
m 1, 2,
5.8
n
and the component by N the Codazzi-Mainardi equation
Lij,k − Lik,j −
n
Γnij Lnk − Γnik Lnj .
5.9
Now, let us assume that the Gaussian curvature K of a surface is constant and that the
parametric curves asymptotic. For parametrization with asymptotic lines we have L11 L22 0. We consider spacelike surfaces with negative curvature and timelike surfaces with
positive curvature, that is, surfaces that have two families of asymptotic lines. In asymptotic
coordinates equation 5.9 for i j 1, k 2, and i k 2, j 1 reduces to
L12,1 L12 Γ111 − Γ212 ,
L12,2 L12 Γ222 − Γ112 .
5.10
Furthermore, the assumption K const. 1/m2 implies L212 W 2 1/m2 . By derivating
this equation with using 5.10 we get
W,1 W Γ111 − Γ212 ,
W,2 W Γ222 − Γ112 .
5.11
International Journal of Mathematics and Mathematical Sciences
19
On the other hand, partial derivatives of W, W 2 −g1 x,2 − g2 x,1 2 for an arbitrary parametrization of a regular admissible surface are equal to
W,1 W Γ111 Γ212 ,
W,2 W Γ222 Γ112 .
5.12
They are obtained by derivating the expression W 2 −g1 x,2 − g2 x,1 2 and using
g2 x,1,1 · σ W 1
Γ g1,1 x,2 · σ,
11
W
g1 x,1,2 · σ − Γ212 g1,2 x,1 · σ,
5.13
obtained from 5.6 for i j 1 and i 1, j 2.
Now from 5.11 and 5.12 it follows that
Γ112 Γ212 0.
5.14
By using expressions in 5.6 we can write this system as
g1,2 x,1 − g1 x,1,2 · σ 0,
g2 x,1,2 − g1,2 x,2 · σ 0.
5.15
g1,2 g2 x,1 − g1 x,2 · σ 0.
5.16
It follows that
0, and therefore the previous equation implies
Furthermore g2 x,1 − g1 x,2 · σ −Wσ 2 /
g1,2 0.
5.17
Substituting 5.17 into the system 5.15 we obtain since gi /
0, i 1, 2
x,1,2 · σ 0.
5.18
Let us analyze conditions 5.17, 5.18. Condition 5.17 implies g1 g1 u, g2 g2 v, that
is, functions gi are functions of one parameter only.
Condition 5.18 implies
x,1,2 · σ 1
1 x,1,2 · g1 x,2 − g2 x,1 g1 h22,1 − g2 h11,2 ,
W
2W
5.19
20
International Journal of Mathematics and Mathematical Sciences
and therefore
g1 h22,1 − g2 h11,2 0.
5.20
Condition 5.17 enables us to introduce new coordinates
u
v
g1 du,
g2 dv
5.21
to obtain g 1 dx/du dx/dudu/du g1 1/g1 1. Analogously we can obtain g 2 1.
For the coefficients hij of the new parametrization we have
h11 h22 ∂x
∂u
∂x
∂v
2
2
1
h11 ,
g12
5.22
1
2 h22 .
g2
Therefore, since g1,2 0,
h11,2 g2 g12 h11,2 ,
h22,1 g1 g22 h22,1 .
5.23
Condition 5.20 now implies ∂h11 /∂v − ∂h22 /∂u h11,2 − h22,1 1/g2 g12 h11,2 −
1/g1 g22 h22,1 1/g12 g22 g2 h11,2 − g1 h22,1 0, which means that the considered coordinates
are Tchebychev.
Conversely, if the asymptotic curves form the Tchebychev net, let us prove that Φ has
constant curvature. The assumptions imply L11 L22 0 and
x,1,2 · σ 0,
5.24
where σ 1/wx,2 − x,1 . Expressions in 5.6 imply that in Tchebyshev coordinates
Christoffel symbols Γ112 , Γ212 , are given by
x,1,2 · σ 0,
W
− x,1,2 · σ 0.
W
Γ112 Γ212
5.25
Therefore Codazzi-Mainardi equations 5.10 are equal to
L12,1 L12 Γ111 ,
L12,2 L12 Γ222 .
5.26
International Journal of Mathematics and Mathematical Sciences
21
Now by differentiating
K
L212
,
W2
5.27
partially in the first variable, we obtain
K,1 W 3 2L12 L12,1 W − L12 W,1 5.28
K,1 W 3 2L212 Γ111 W − W,1 .
5.29
W,1 Γ111 W,
5.30
K,1 0.
5.31
K,2 0,
5.32
and 5.26 implies
Since from 5.12 we have
it follows that
In the same way we can conclude
and therefore K const, what was claimed.
Let us now determine the angle between curves of the Tchebyshev net on a regular
admissible surface. The angle between nonisotropic unit vectors
a 1, a2 , a3 ,
b 1, b2 , b3 5.33
in the pseudo-Galilean space G13 is determined by using the following expression:
ϕ2 ∠a, b2 b2 − a2 2 − b3 − a3 2 .
5.34
The defined angle is invariant under the group of motions 2.2. By applying expression 5.34
to the tangent vectors of the Tchebyshev parametric curves, we obtain
2
ϕ2 y2 − y1 − z2 − z1 2 W 2 ,
5.35
22
International Journal of Mathematics and Mathematical Sciences
and therefore we can write
ϕ2 −
y2 − y1
− z2 − z1 2 .
2
5.36
The function ϕ and the function W as well are differentiable of class Cr , r ≥ 2, if and only if a
surface is not lightlike.
For the Tchebyshev coordinates we have
g1 g2 1,
Γ112 Γ212 0,
5.37
and the Gauss integrability equation 5.8 for i j 1, k 2, m 1 turns to
Γ111,2 Γ211 Γ122 −
L212
−K.
W2
5.38
Furthermore, from 5.12 we have
Γ111 W,1
,
W
Γ222 W,2
,
W
W,1
,
W
Γ122 −
5.39
which with 5.6 implies
Γ211 −
W,2
.
W
5.40
Therefore
−K WW,1,2 − W,1 W,2
W,2
W,1,2
W,1
,
−
−
W
W
W
W2
5.41
that is, W,1,2 −K W. Since W ±ϕ, where ϕ is the angle between Tchebyshev curves, then
we have
ϕ,1,2 −Kϕ.
5.42
If the Gaussian curvature of the surface is constant K 1/m2 , m ∈ R, the previous
equation turns to the Klein-Gordon equation
ϕ,1,2 −
1
ϕ.
m2
5.43
Therefore we have proved the following theorem:
Theorem 5.3. The angle between curves of the Tchebychev net and the function W as well on a
spacelike surface of constant negative curvature and timelike surface of constant positive curvature in
G13 satisfy the Klein-Gordon equation.
International Journal of Mathematics and Mathematical Sciences
23
Finally, the functions
κu, v |x,1,1 u, v · x,1,1 u, v|,
κu, v |x,2,2 u, v| · x,2,2 u, v
5.44
satisfy the Klein-Gordon equation as well. The function κu, v0 is the curvature of a
parametric curve v v0 of the Tchebychev net and κu0 , v a parametric curve u u0 . Notice
that these curves are parametrized by the arc-length, since x1 x2 1.
Theorem 5.4. The functions κ, κ on a spacelike surface of constant negative curvature and timelike
surface of constant positive curvature in G13 satisfy the Klein-Gordon equation.
Proof. We have
x,1,1 Γ111 x,1 − x,2 Γ111 −Wσ −W,1 σ
5.45
and therefore x,1,1 is a spacelike timelike vector for a spacelike timelike surface. Hence we
can write
κ2 u, v −x,1,1 · x,1,1 W,12 .
5.46
Now we have
κκ,1 W,1 W,1,1 ,
κκ,2 W,1 W,1,2 .
5.47
Therefore
κκ,1,2 κκ,2 ,1 − κ,1 κ,2
W,1 W,1,2 ,1 − W,1,1 W,1,2 W,1 W,1,2,1 −
1
1
W,12 − 2 κ2 .
2
m
m
5.48
Therefore we have κ,1,2 −1/m2 κ. Analogously we prove for κ.
Theorem 5.5. The parametric net on a spacelike surface of revolution 4.6 obtained by pseudoEuclidean rotations forms the Tchebyshev net in the following parametrization of the surface (K −1/a2 ):
xu, v u v,
u−v
B cos
sinh
,
yu, v A sin
a
a
a
u v
u v u−v
zu, v A sin
B cos
cosh
,
a
a
a
u v
u v 5.49
24
International Journal of Mathematics and Mathematical Sciences
and on a timelike surface of revolution 4.5 (K 1/a2 , see Figure 7)
xu, v u v,
u v u v
u−v
B cos
cosh
,
yu, v A sin
a
a
a
u v
u v u−v
zu, v A sin
B cos
sinh
.
a
a
a
5.50
The parametric net on a surface of revolution 4.14 obtained by isotropic rotations forms the
Tchebyshev net in the following parametrization of a spacelike surface with K −2a/b < 0,
a, b ∈ R \ {0} (see Figure 8):
xu, v u v,
⎛
⎛
⎛
⎞⎞2
⎛
⎞⎞
2a
2a
1 ⎝
A
⎝−A cosh⎝
−A cosh⎝
yu, v u − v⎠⎠ u − v⎠⎠
4a
b
2a
b
1
u v2 ,
2b
⎛
⎛
⎞ ⎞
1 ⎝1
2a
2a
zu, v sinh⎝
2u − 2v⎠ −
u − v⎠,
4a 2
b
b
B
5.51
and of a timelike surface with K 2a/b > 0, a, b ∈ R \ {0}
xu, v u v,
⎛
⎛
⎞⎞2
⎛
⎛
⎞⎞
1 ⎝
2a
2a
A
⎝A − sinh⎝
yu, v −
A − sinh⎝
u − v⎠⎠ u − v⎠⎠
4a
b
2a
b
1
u v2 ,
2b
⎛
⎛
⎞ ⎞
1 ⎝1
2a
2a
zu, v sinh⎝
2u − 2v⎠ u − v⎠.
4a 2
b
b
B
5.52
Remark 5.6. Notice that for the given parametrizations of surfaces obtained by pseudoEuclidean rotations we have
g1 g2 1,
h11 h22 ,
5.53
that is, Tchebyshev curves satisfy condition similar to that one in the Euclidean space E G 1. Therefore, the parametric curves satisfy h11,2 h22,1 h11,1 and h22,1 h11,2 h22,2 ,
International Journal of Mathematics and Mathematical Sciences
25
0.6
0.4
0.2
0.5
−0.5
1
−0.2
−0.4
−0.6
a
b
Figure 7: A timelike surface obtained by pseudo-Euclidean rotations parametrized by the Tchebychev net
and the projection of a parametric curve onto yz-plane.
0.6
0.4
0.2
0.2
0.4
0.6
0.8
1
1.2
1.4
−0.2
−0.4
−0.6
a
b
Figure 8: A spacelike surface obtained by isotropic rotations parametrized by the Tchebychev net and the
projection of a parametric curve onto yz-plane.
which describes h11 , h22 as the functions of form ψu v. The angle between curves of the
Tchebychev net for spacelike and timelike surfaces obtained by pseudo-Euclidean rotations
is equal to
ϕu, v u v
u v 2
A sin
B cos
.
a
a
a
5.54
For spacelike surfaces obtained by isotropic rotations we have
h11 − h22 uv
,
2ab2
5.55
26
International Journal of Mathematics and Mathematical Sciences
and the angle is equal to
2
sinh
ab
ϕu, v 2a
u − v
b
5.56
and for timelike surfaces obtained by isotropic rotations to
ϕu, v 2
cosh
ab
2a
u − v.
b
5.57
Furthermore, functions κu, v, κu, v are given by
κu, v κu, v u v
u v 2
A cos
− B sin
2
a
a
a
5.58
for spacelike and timelike surfaces obtained by pseudo-Euclidean rotations and by
2
κu, v κu, v cosh
b
2a
u − v,
b
2
κu, v κu, v sinh
b
2a
u − v
b
5.59
for spacelike, respectively, timelike surfaces obtained by isotropic rotations.
Remark 5.7. Notice that the torsion of the parametric curves in the Tchebyshev parametrization is constant. This is the consequence of the general result which states that the torsion
of asymptotic curves on a spacelike
√ surface of negative curvature and timelike surface of
positive curvature is equal to τ ± K.
Remark 5.8. From a known solution of the Klein-Gordon equation, we can construct a surface.
Let us consider a more general particular solution of the Klein-Gordon equation, that is, the
solution
μu v
μu v
B sin
,
ϕu, v eλu−v/a A cos
a
a
λ, μ, A, B, a ∈ R,
5.60
which satisfies ϕ,1,2 −λ2 μ2 /a2 ϕ. Considering 5.60 as the curvature κ of a family of
curves in the Tchebyshev net, we can construct a surface of constant curvature K by means
of the Frenet
frame {t, n, b} of parametric curves. Frenet formulas are t κn, n τb, b τn,
where τ ± λ2 μ2 /a2 , and they allow us to construct fields t x1 or t x2 and n, b and
therefore a parametrization x xu, v. The obtained family of surfaces contains family of
surfaces of revolution λ 0 for surfaces obtained by pseudo-Euclidean rotations and μ 0
for surfaces obtained by isotropic rotations.
International Journal of Mathematics and Mathematical Sciences
27
Figure 9: A spacelike surface of constant curvature K −5 with λ 2, μ A a 1, B 0.
Example 5.9. A surface with parametrization
xu, v u v,
√
√
√
1 2u−v ,
2 cosu v sinu v 5 cosh 5u − v − 2 sinh 5u − v
e
10
√
√
√
1 2u−v zu, v e
2 cosu v sinu v −2 cosh 5u − v 5 sinh 5u − v
10
5.61
yu, v is a spacelike surface parametrized by the Tchebyshev net having K −5 see Figure 9.
References
1 O. Giering, Vorlesungen über höhere Geometrie, Friedr. Vieweg & Sohn, Braunschweig, Germany, 1982.
2 B. Divjak, Geometrija pseudogalilejevih prostora [Ph.D. thesis], University of Zagreb, 1997.
3 B. Divjak, “Curves in pseudo-Galilean geometry,” Annales Universitatis Scientiarum Budapestinensis de
Rolando Eötvös Nominatae, vol. 41, pp. 117–128, 1998.
4 B. Divjak and Ž. Milin-Šipuš, “Special curves on ruled surfaces in Galilean and pseudo-Galilean
spaces,” Acta Mathematica Hungarica, vol. 98, no. 3, pp. 203–215, 2003.
5 B. Divjak and Ž. Milin Šipuš, “Minding isometries of ruled surfaces in pseudo-Galilean space,” Journal
of Geometry, vol. 77, no. 1-2, pp. 35–47, 2003.
6 B. Divjak and Ž. Milin Šipuš, “Transversal surfaces of ruled surfaces in the pseudo-Galilean space,”
Sitzungsberichte. Abteilung II, vol. 213, pp. 23–32, 2004.
7 B. Divjak and Ž. Milin Šipuš, “Some special surfaces in the pseudo-Galilean space,” Acta Mathematica
Hungarica, vol. 118, no. 3, pp. 209–226, 2008.
8 Ž. Milin Šipuš, “Ruled Weingarten surfaces in the Galilean space,” Periodica Mathematica Hungarica,
Journal of the János Bolyai Mathematical Society, vol. 56, no. 2, pp. 213–225, 2008.
9 Ž. Milin Šipuš and B. Divjak, “Translation surfaces in the Galilean space,” Glasnik Matematički. Serija
III, vol. 46, no. 2, pp. 455–469, 2011.
10 O. Röschel, Die Geometrie des Galileischen Raumes, Habilitationsschrift, Leoben, Austria, 1984.
28
International Journal of Mathematics and Mathematical Sciences
11 O. Röschel, “Torusflächen des galileischen Raumes,” Studia Scientiarum Mathematicarum Hungarica,
vol. 23, no. 3-4, pp. 401–410, 1988.
12 W. Kühnel, Differential Geometry, Curves—Surfaces—Manifolds, vol. 16 of Student Mathematical Library,
American Mathematical Society, Providence, RI, USA, 2002.
13 N. E. Maryukova, “Surfaces of constant negative curvature in a Galilei space and the Klein-Gordon
equation,” Rossiı̆skaya Akademiya Nauk, vol. 50, no. 1, pp. 203–204, 1995.
14 B. A. Rosenfeld and N. E. Maryukova, “Surfaces of constant curvature and geometric interpretations
of the Klein-Gordon, sine-Gordon and sinh-Gordon equations,” Institut Mathématique Publications,
vol. 61, pp. 119–132, 1997.
15 E. Molnár, “The projective interpretation of the eight G3 -dimensional homogeneous geometries,”
Beiträge zur Algebra und Geometrie, vol. 38, no. 2, pp. 261–288, 1997.
16 D. J. Struik, Lectures on Classical Differential Geometry, Dover Publications Inc, New York, NY, USA,
2nd edition, 1988.
17 S. S. Chern, “Geometrical interpretation of the sinh-Gordon equation,” Polska Akademia Nauk. Annales
Polonici Mathematici, vol. 39, pp. 63–69, 1981.
18 H. Sachs, Isotrope Geometrie des Raumes, Friedr. Vieweg & Sohn, Braunschweig, 1990.
Advances in
Operations Research
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Advances in
Decision Sciences
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Mathematical Problems
in Engineering
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Journal of
Algebra
Hindawi Publishing Corporation
http://www.hindawi.com
Probability and Statistics
Volume 2014
The Scientific
World Journal
Hindawi Publishing Corporation
http://www.hindawi.com
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
International Journal of
Differential Equations
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Volume 2014
Submit your manuscripts at
http://www.hindawi.com
International Journal of
Advances in
Combinatorics
Hindawi Publishing Corporation
http://www.hindawi.com
Mathematical Physics
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Journal of
Complex Analysis
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
International
Journal of
Mathematics and
Mathematical
Sciences
Journal of
Hindawi Publishing Corporation
http://www.hindawi.com
Stochastic Analysis
Abstract and
Applied Analysis
Hindawi Publishing Corporation
http://www.hindawi.com
Hindawi Publishing Corporation
http://www.hindawi.com
International Journal of
Mathematics
Volume 2014
Volume 2014
Discrete Dynamics in
Nature and Society
Volume 2014
Volume 2014
Journal of
Journal of
Discrete Mathematics
Journal of
Volume 2014
Hindawi Publishing Corporation
http://www.hindawi.com
Applied Mathematics
Journal of
Function Spaces
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Optimization
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014
Hindawi Publishing Corporation
http://www.hindawi.com
Volume 2014