Detecting Additional Polarization Modes with eLISA L. Philippoz, P. Jetzer Summary
advertisement

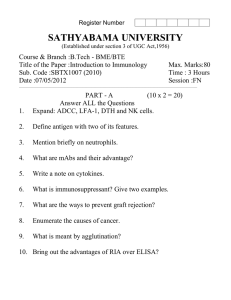
Detecting Additional Polarization Modes with eLISA L. Philippoz, P. Jetzer Summary Within the frame of Einstein’s General Relativity, gravitational waves are expected to possess two tensorial polarizations, namely the well-known h+ and h× modes. Other metric theories of gravity however allow the existence of additional modes (two vector and/or two scalar modes), and the (non-)observation of those additional polarizations could put constraints on the validity of all existing theories, which would consequently provide a further test for General Relativity. In its 2-arm-planned-configuration, eLISA only consists of one detector orbiting around the Sun, and we therefore investigate if there is a possibility to still detect and separate additional modes of a given gravitational wave signal. Polarization modes Sensitivity to additional modes Perturbed metric corresponding to a propagating gravitational wave: • Time-delay interferometric combinations, hij (ωt − k · x) = X hA(ωt − k · 2-arm configuration (4 beams) x)eA ij • Noise power spectrum : SX (f ) A with A = ×, +, b, l, x, y the six possible polarization modes and the following tensors (tensor, scalar and vector modes) y x 1 10 XRMS(f)/H z x −1 10 −2 (d) y Vector Scalar T Scalar L 10 −24 10 −4 −3 10 −2 10 f(Hz) −1 10 0 10 10 −4 10 −3 10 −2 10 f(Hz) −1 10 0 10 more sensitive to (longitudinal) scalar modes) z z • XRMS(f ) and the sensitivity are given for LISA (similar results expected with shorter arms; to be confirmed) (f) Stochastic GW background : single detector [7] • GW stochastic background in the low frequency limit Z ∞ XZ h(t, x) = dΩ̂ df h̃A(f, Ω̂)e2πif (t−Ω̂x/c)FA(Ω̂) S2 • If the output data of the single detector is written as h(t) + n(t), with n(t) the noise, the autocorrelation of the signal reads −∞ 1 hh̃(f )h̃ (f )i = δ(f − f 0)Sh(|f |) 2 ∗ with A = +, ×, x, y, b, l all possible polarizations, FA the antenna pattern function. • Overlap reduction function (how much degree of correlation is preserved between detectors) 1 ij J kj ˆ ˆ ij kl ˆ ˆ ˆ ˆ M M i M ρM (α)D D + ρ (α)D D γIJ (f ) = 2 d d + ρ (α)D 1 ij 2 I,k J i j 3 I I DJ didj dk dl sin χ x 2πf |x| ˆ = f (j0(α), j2(α), j4(α)), di = ,α= , M = T, V, S |x| c • GW background energy density −22 10 • Similar behaviour between LISA and eLISA in the high-frequency regime (where they are Stochastic GW background : network of detectors [1] ΩTgw Tensor −3 −4 (e) with f Hz 1 −23 10 0 0 1 0 0 0 y exij = 0 0 0 eij 0 0 1 1 0 0 0 1 0 ρM i 0.1 10 A 0.01 −21 10 x 0.001 10 10 (c) 10-42 Scalar L 0 y 1 0 0 0 0 0 ebij = 0 1 0 elij 0 0 0 0 0 0 0 0 1 Tensor Vector Scalar T (b) y eLISA x (a) LISA 10-40 B : 1 cycle/year, SNR=5 0 1 0 1 0 0 × e+ = e 0 −1 0 ij 1 0 0 ij 0 0 0 0 0 0 10-38 10-44 10-4 X Sensitivity y • Root-mean squared GW response : XRMS(f ) p • Sensitivity : SNR · SX (f )B/XRMS(f ) Noise power spectrumHz ¹ 10-36 = Ω+gw + Ω× gw (similar for ΩVgw and ΩSgw), related to the 0 with Sh(|f |) the one-sided power spectral density; one can define Sn in a similar way for the noise. • The maximum SNR given by this process is Z ∞ 2 T S (|f |) h SN R2 = df 2 −∞ [Sh(|f |) + Sn(|f |)]2 ⇒ Also valid in the high-frequency limit, for a single detector, but for an unpolarized GWB 3 A (f ) ∝ f Sh (f ) one-sided power spectral density S(|f |) ∝ hh̃∗A(f, Ω̂)h̃A0 (f 0, Ω̂0)i by ΩM gw • The tensor, vector and scalar modes can then be separately detected via #(1/2) Z ∞ " M 2 (Ω (f )) det F(f ) gw M SN R ∝ df 6F (f ) f M 0 Possible solutions for eLISA • Cross-correlating the TDI combinations of a LISA-like single detector also correlates the noise • The separation of all modes however requires a network of detectors 0 X where the elements of the (3 × 3)-matrix F are given by FM M 0 = det pairs M γIJ (t, f )γiM (t, f ) dt PI (f )PJ (f ) • Work in progress – Letting eLISA evolve on its orbit and correlating the signals at different time ⇒ Valid for a network of independant detectors in space (3 LISA-like detectors would be suffi- – Correlating eLISA signal with future earth-based detectors around 1Hz cient), in the low frequency limit, and for a full polarized GWB ⇒ “Static” system (the relative position of the detectors in the network doesn’t change) References [1] Nishizawa A., Taruya A., Kawamura S., Phys. Rev. D 81, 104043 (2010) [5] Tinto M., Alves M.E., Phys. Rev. D 82, 122003 (2010) [2] Nishizawa A. et al., Phys. Rev. D 79, 082002 (2009) [6] Estabrook F.B., Tinto M., Armstrong J.W., Phys. Rev. D 62, 042002 (2000) [3] Seto N., Phys. Rev. L 97, 151101 (2006) [7] Tinto M., Armstrong J.W., arXiv:1205.4620v1 [gr-qc] [4] Seto N., Taruya A., Phys. Rev. D 77, 103001 (2008) [8] Will C., Living Rev Relativity 9, (2006), 3.