Goal-oriented adaptive finite element methods for quasilinear PDE Numerical comparison of methods
advertisement

Goal-oriented adaptive finite element methods for
quasilinear PDE
Numerical comparison of methods
Sara Pollock
Collaborators: Michael Holst, Yunrong Zhu
Texas A&M Department of Mathematics
October 24, 2014
S. Pollock
Texas A&M Mathematics
1/15
GOAFEM for quasilinear problems
Finite Element Circus October 24-25, 2014
Goal-oriented method
Goal function g : X → R, find g (u ) where u ∈ X satisfies the primal problem:
F (u ) = −div(κ(u )∇u ) − f = 0. Assume a unique solution.
Following [Becker, Rannacher, 2001]. Trivial constrained optimization problem for g:
Find u ∈ X such that
g (u ) =
min
g (v ).
{v ∈X :F (v )=0}
The critical points of the Lagrangian correspond to the minimum u,
L (u , z ) := g (u ) − hF (u ), z iY ∗ ,Y ,
where z is the adjoint variable. Euler-Lagrange system:
hF (u ), v iY ∗ ,Y = 0,
0
for all v ∈ Y
0
hF (u )w , z iY ∗ ,Y = hg (u ), w iX ∗ ,X ,
for all w ∈ X .
If g is a linear functional, the right hand side is hg , w iX ∗ ,X .
Discrete Euler-Lagrange system:
hF (uh ), v iY ∗ ,Y = 0,
0
for all v ∈ Yh
0
hF (uh )w , zh iY ∗ ,Y = hg (uh ), w iX ∗ ,X ,
S. Pollock
Texas A&M Mathematics
for all w ∈ Xh .
2/15
GOAFEM for quasilinear problems
Finite Element Circus October 24-25, 2014
Error representation and convergence
Denote the weak-form residual corresponding to the primal and approximate dual
problems
ρ(uh , v ) := −h(F (uh ), v i, for all v ∈ Y
ρ (zh , w ) := hg 0 (uh ), w i − hF 0 (uh )w , zh i, for all w ∈ X .
∗
where the Gateaux derivative in direction w given as F 0 (u )w = ddε F (u + εw )
Then
ε=0
as in [Becker, Rannacher, 2001] we have the error representation
g (u ) − g (uh ) =
1
2
1
ρ(uh , z ) + ρ∗ (zh , u ) + R3 ,
2
where R3 is given by
Z 1
R3 =
L 000 (uh + se; zh + se∗ )({e, e∗ })({e, e∗ })({e, e∗ })s(s − 1)ds
0
Z
=
1
hg 000 (uh + se)(e)(e), ei − hF 000 (uh + se)(e)(e)(e), zh + se∗ i
−3hF 00 (uh + se)(e)(e), e∗ i s(s − 1) ds.
0
S. Pollock
Texas A&M Mathematics
3/15
GOAFEM for quasilinear problems
Finite Element Circus October 24-25, 2014
Results for adaptive methods.
Example: stationary heat equation with nonlinear diffusion:
F (u ) = −div(κ(u )∇u ) − f = 0 in Ω,
u = 0 on ∂Ω
For simplicity say Vh ⊂ X = Y . Discrete system:
hκ(uh )∇uh , ∇v i = hf , v i,
hκ(uh )∇w , ∇zh i + hκ0 (uh )w ∇uh , ∇zh i = hg , w i,
for all v ∈ Vh
for all w ∈ Vh .
If κ(s) ∈ C 2 (R) satisfies κ(s) ≥ α ≥ 0 and κ(s) along with its first and second
derivatives are bounded, the adaptive algorithm for u converges.
Weak convergence of the primal residual implies convergence of the weak solution
[Holst, Tsogtgerel, and Zhu, 2009].
Z
ρ(uh , v ) := − F (uh )v dx → 0, for all v ∈ Y =⇒ uh → u .
Claim: A similar idea can be used to show convergence of the Euler-Lagrange system
for the goal-oriented method.
Question: Does it matter??
Convergence of uh → u implies g (uh ) → g (u ), at least eventually.
S. Pollock
Texas A&M Mathematics
4/15
GOAFEM for quasilinear problems
Finite Element Circus October 24-25, 2014
Numerical comparison of methods
Investigate numerically the effectiveness of the goal-oriented method for quasilinear
problems.
We will compare numerical results using three different adaptive algorithms
1
PR + DR: Refine for the local strong-form residuals of both the primal and dual
problems.
2
DWR: Refine for the product of primal residual and dual solution, discussed in,
e.g., [Becker, Rannacher, 2001] (among many others).
3
PR : Refine for the residual of the primal problem (standard AFEM).
4
PR + DWR : DWR refinement plus refinement for the primal residual.
The GOAFEM algorithm is based on the standard AFEM iterative loop:
SOLVE → ESTIMATE → MARK → REFINE .
S. Pollock
Texas A&M Mathematics
5/15
GOAFEM for quasilinear problems
Finite Element Circus October 24-25, 2014
Estimate
Residual-based indicators: linear finite elements for both primal and dual problems.
DWR: quadratic finite elements for the dual problem.
VT : linear Lagrange finite elements P1 (T )
V2T : quadratic Lagrange finite elements P2 (T )
Estimate: The DWR indicator estimates the influence of the dual solution on the
primal residual. Elementwise
1
ηTk (v , T ) := hR (v ), z 2 − Ik z 2 iT + hJT (v ), z 2 − Ik z 2 i∂T ,
2
v ∈ VTk
Residual error indicator:
ηpT (v , T ) := hTp kR (v )kpL2 (T ) + hT kJT (v )kpL2 (∂T ) ,
v ∈ VT ,
with R (v ) = −(∇ · (κ(v )∇v ) + f ). The dual residuals are defined analogously. The
jump residual:
JT (v ) := J[κ(v )∇v ] · nK∂T and JφK∂T := lim φ(x + tn) − φ(x − tn)
t →0
where n is the the outward normal defined piecewise on ∂T .
S. Pollock
Texas A&M Mathematics
6/15
GOAFEM for quasilinear problems
Finite Element Circus October 24-25, 2014
Test Problem
Quasilinear diffusion problem on Ω = (0, 1)2 .
Z
κ(u )∇u · ∇v dx =
fv dx ,
κ(u ) = 1 +
Ω
Ω
The goal function g (u ) =
R
1
Z
Ω gu dx,
10−2 + (u − a)2
with
g (x , y ) = 200 exp −200 (x − 0.7)2 + (y − 0.7)2
and f (v ) chosen so the exact solution u (x , y ) = sin(πx ) sin(πy ). The parameter a
controls the smoothness and positioning of the near-singularity of the problem data in
the domain.
a = 0.3
(P1)
a = 0.8
(P2)
The initial mesh has 288 elements. The Dörfler parameter θ = 0.5.
S. Pollock
Texas A&M Mathematics
7/15
GOAFEM for quasilinear problems
Finite Element Circus October 24-25, 2014
Convergence problem!!
Z
κ(u )∇u · ∇v =
Z
fv ,
κ(u ) = 1 +
1
10−2 + (u − a)2
The standard Newton iterations for solving the nonlinear problem: hF (U ), vh i = 0 :
Starting with initial guess U = U0 , iterate:
Find: w such that hDF (U )w , v i = −hF (U ), v i
Update: U = U + w
Check: if kF (U )k < tolerance
Sensitivity to initial data: This method did not converge for a ∈ (0.155, 1.35). In fact ,
starting the Newton method with the solution U0 = sin(πx ) sin(πy ) converged in 3
iterations, but failed to converge with a perturbation of more than 2 × 10−2 .
For the results here a damped Newton method is implemented where the step size is
decreased by a factor of 1/2 until the residual decreases (line search method).
A better method by means of Tikhonov regularization with appropriate penalty
parameters is currently under investigation.
S. Pollock
Texas A&M Mathematics
8/15
GOAFEM for quasilinear problems
Finite Element Circus October 24-25, 2014
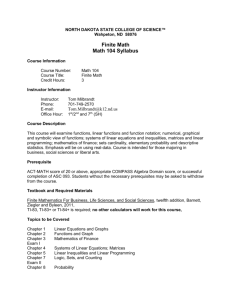
Numerics: P1- error reduction
Z
κ(u )∇u · ∇v =
1
Z
fv ,
κ(u ) = 1 + −2
10 + (u − 0.3)2
g (x , y ) = 200 exp −200 (x − 0.7)2 + (y − 0.7)2
Goal Error Reduction
f
−1
10
6000
4000
−2
10
2000
0
−2000
−3
−4000
10
−6000
1
0.8
1
0.6
0.8
0.6
0.4
−4
10
0.4
0.2
2
10
3
10
4
10
5
0.2
0
10
0
Figure: Left: goal error after 12 PR+DR (blue), 11 DWR (green), 12 PR (magenta), 10 PR+DWR
(cyan) iterations, compared with n−1 . Right: problem data f (x , y ), 0 ≤ x , y ≤ 1.
S. Pollock
Texas A&M Mathematics
9/15
GOAFEM for quasilinear problems
Finite Element Circus October 24-25, 2014
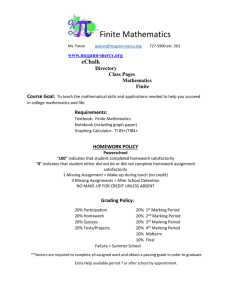
Numerics: P1- mesh
Z
κ(u )∇u · ∇v =
1
Z
κ(u ) = 1 + −2
10 + (u − 0.3)2
g (x , y ) = 200 exp −200 (x − 0.7)2 + (y − 0.7)2
Finite element mesh
fv ,
Finite element mesh
Finite element mesh
Figure: Mesh after 6 adaptive refinements. Left: PR+DR; center: DWR; right: PR + DWR
S. Pollock
Texas A&M Mathematics
10/15
GOAFEM for quasilinear problems
Finite Element Circus October 24-25, 2014
Numerics: P1- global error
The maximum value of uh (x , y ) should approach 1.
ITER
PR + DR
DWR
PR
PR + DWR
2
4
6
8
10
0.948413
0.991561
1.00093
1.00046
0.999875
0.945183
0.965888
0.979592
0.98854
0.991947
0.947803
0.990919
1.00099
1.00037
0.999748
0.954402
0.985238
0.993353
0.997274
0.998994
An accurate height of the sinusoid in this case agrees with an accurate approximation
of the quantity of interest.
Some global resolution may be necessary to approximate the quantity of interest: in
this case the primal solution is smooth and has global support on the domain.
S. Pollock
Texas A&M Mathematics
11/15
GOAFEM for quasilinear problems
Finite Element Circus October 24-25, 2014
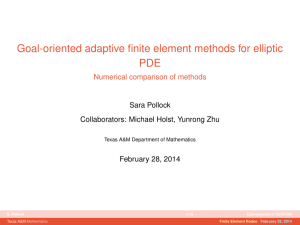
Numerics: P2- error reduction
Z
κ(u )∇u · ∇v =
1
Z
fv ,
κ(u ) = 1 + −2
10 + (u − 0.8)2
g (x , y ) = 200 exp −200 (x − 0.7)2 + (y − 0.7)2
Goal Error Reduction
f
−2
10
4000
3000
2000
1000
−3
10
0
−1000
−2000
1
0.8
1
0.6
0.8
0.6
0.4
−4
0.4
0.2
10
2
10
3
10
4
10
0.2
0
5
0
10
Figure: Left: Goal error after 13 PR+DR (blue), 16 DWR (green), 12 PR (magenta), 12
PR+DWR (cyan) iterations, compared with n−1 . Right: data f (x , y ), 0 ≤ x , y ≤ 1.
S. Pollock
Texas A&M Mathematics
12/15
GOAFEM for quasilinear problems
Finite Element Circus October 24-25, 2014
Numerics: P2- mesh
Z
κ(u )∇u · ∇v =
1
Z
κ(u ) = 1 + −2
10 + (u − 0.8)2
g (x , y ) = 200 exp −200 (x − 0.7)2 + (y − 0.7)2
Finite element mesh
fv ,
Finite element mesh
Finite element mesh
Figure: Mesh after 6 adaptive refinements. Left: PR+DR; center: DWR; right: PR + DWR
S. Pollock
Texas A&M Mathematics
13/15
GOAFEM for quasilinear problems
Finite Element Circus October 24-25, 2014
Numerics: P2- global error
The maximum value of uh (x , y ) should approach 1.
ITER
PR + DR
DWR
PR
PR +DWR
2
4
6
8
10
12
1.01016
1.00206
1.00101
0.999872
1.00016
0.999966
1.00333
1.00846
1.00138
0.999949
0.999065
0.999117
1.01008
1.00184
1.00111
0.999765
1.00001
0.999918
1.01032
1.00344
1.00158
0.999784
0.999941
0.999967
Properties that may indicate necessary refinement for the primal problem:
quasilinear problems or stronger nonlinearities
near-singularities in problem data: nontrivial quadrature error
smooth solution with global support on domain
S. Pollock
Texas A&M Mathematics
14/15
GOAFEM for quasilinear problems
Finite Element Circus October 24-25, 2014
Main references
Becker, R. and Rannacher, R.,
An optimal control approach to a posteriori error estimation in finite element
methods, Acta Numerica,10, 1-102,2001
Holst, M.,
MCLite: An Adaptive Multilevel Finite Element MATLAB Package for Scalar
Nonlinear Elliptic Equations in the Plane, UCSD Technical report and guide to the
MCLite software package.
Holst, M., Tsogtgerel, G., and Zhu, Y.
Local and Global Convergence of Adaptive Methods for Nonlinear Partial
Differential Equations, 2009.
Holst, M., and Pollock, S., and Zhu, Y.
Convergence of goal oriented methods for semilinear problems, 2012.
S. Pollock
Texas A&M Mathematics
15/15
GOAFEM for quasilinear problems
Finite Element Circus October 24-25, 2014