Generating Bézier Surfaces Based on 8th-order PDE
advertisement

Communications in Information Science and Management Engineering (CISME)
Generating Bézier Surfaces Based on 8th-order PDE
Zongzheng Wang a, b, Guojin Wang b, *
a
Department of mathematics, Zhejiang University, Hangzhou, Zhejiang, P. R. China
b
State Key Laboratory of CAD&CG, Zhejiang University, Hangzhou 310027
*
wanggj@zju.edu.cn
Abstract-This paper presents a general 8th-order PDE method to
generate Bézier surfaces from the boundary with position and
tangent vector information. We extend the work on generating
biharmonic Bézier surfaces by Monterde to generating Bézier
surfaces based on a general 4th-order PDE. And further the
results are extended to generate tetraharmonic Bézier surfaces by
a general 8th-order PDE. The solution of the general 8th-order
PDE is actually the extreme value of the corresponding 4th-order
quadratic functional. Furthermore we deduce its complete
solution, and provide the concrete algorithm. Finally, we
demonstrate that the tetraharmonic Bézier surfaces and the
Coons bicubic blending surfaces which have significant
application values in CAD are the special cases of our results.
Keywords-Bézier surfaces; PDE surfaces; 4th-order quadratic
functional; general 8th-order PDE
I. INTRODUCTION
In Computer Aided Geometric Design (CAGD), the surface
modeling technique based on Partial Differential Equations
(PDE) is an important class of surface modeling techniques.
This technique is based on solving a set of elliptic partial
differential equations to generate a series of surfaces. In fact,
the partial differential operator in the equations represents the
process of smoothing, and the resulting surfaces are smooth
and natural. So the PDE technique is widely used in the shape
design, such as ship and plane shape design.
In 1989, Bloor first introduced PDE surfaces into CAGD,
and caused a research boom. Then many scholars did a deep
research on it [1]-[10]. However, the PDE surfaces are not
compatible with the traditional CAD systems, and not easy to
locally control, and then they are not convenient in practical
applications. To overcome these shortcomings, Bloor [2] studied
B-spline approximation of PDE surfaces using the finite
element method and node configuration, which is called the
Bloor-Wilson algorithm. In addition, Bézier curves and
surfaces are also commonly used tools in CAD systems.
Monterde did a lot of researches on the Bézier approximation
of PDE surfaces [11]-[15].
Monterde first studied some special PDE surfaces, such as
harmonic, biharmonic Bézier surfaces [13], and then extended
the method to general 4th-order PDE Bézier surfaces [14].
Centella and Monterde also presented two C1 methods to
generate Bézier surfaces from the boundaries. One is to solve
tetraharmonic equations; another is to solve nonhomogeneous
biharmonic equations.
In this paper, we extend the work on tetraharmonic surfaces
to general 8th-order PDE Bézier surfaces. In Section 2, we
discuss a class of general 4th-order quadratic functional and its
corresponding 8th-order Euler-Lagrange equations. We study
the Bézier polynomial solutions of the 8th-order
Euler-Lagrange equations, and propose a specific algorithm in
Section 3. Section 4 provides some numerical examples and
shows that some existing surfaces, such as the tetraharmonic
Bézier surface and Coons bicubic blending surface which have
significant application values in CAD, are actually special
cases of our results. The solution surfaces interpolate both the
boundary position and boundary tangent vector conditions, and
have eight degrees of freedom which are connoted in the
8th-order PDE as its coefficients, so we can change surface
shape by modifying the eight coefficients, and hence they will
have more applications in engineering and meet more
requirements of the users.
II. DISCUSSION OF THE GENERAL FOURTH-ORDER QUADRATIC
FUNCTIONAL
In this section, we will discuss the general 4th-order
quadratic functional and its Euler-Lagrange equation which is
an 8th-order PDE. It is well known that finding the extreme
values of a functional is equal to solving its corresponding
Euler-Lagrange equation. Centella and Monterde [15] studied
tetraharmonic Bézier surface, i.e., ∆ 4 r = 0 , its corresponding
functional is
)
Ftetrahar ( r=
(
1
ruuuu
2 ∫R
+4 ruvvv
2
2
+ 4 ruuuv
+ rvvvv
2
2
+ 6 ruuvv
2
) dudv.
It is a fourth-order quadratic functional, and the tetraharmonic
Bézier surface is the extremal solution of this functional.
It is usual for us to write a general fourth-order quadratic
functional as the following form:
FABCDEFGHIJKL (r ) =
+ D ruuuv
2
(
1
A ruuuu
2 ∫R
2
+ B ruuuu , ruuuv + C ruuuu , ruuvv
+ E ruuuu , ruvvv + F ruuuu , rvvvv + G ruuvv
+ H ruuuv , rvvvv + I ruuvv , rvvvv + J ruvvv
+ K ruvvv , rvvvv + L rvvvv
2
2
2
) dudv.
The corresponding Euler-Lagrange equation of this
functional is:
∂8 r
∂8 r
∂8 r
∂8 r
∂8 r
+
B
+
(
C
+
D
)
+
E
+
H
∂u 8
∂u 7 ∂v
∂u 6 ∂v 2
∂u 5 ∂v 3
∂u 3 ∂v 5
8
8
8
8
∂r
∂r
∂r
∂r
+( F + G ) 4 4 + ( I + J ) 2 6 + K
+L 8 =
0.
7
∂u ∂v
∂u ∂v
∂u∂v
∂v
A
Note that
ruuuu , ruuvv and ruuuv
2
can be combined into
one term in the abovemetioned equation,
2
2
ruuuu , rvvvv
ruuvv , rvvvv
,
and
are treated
and ruuvv
ruvvv
analogously. Therefore, we can rewrite the general fourth-order
quadratic functional as follows:
C 2012 World Academic Publishing
CISME Vol.2 No.1 2012 PP.10-17 www.jcisme.org ○
- 10 -
Communications in Information Science and Management Engineering (CISME)
FABCDEFGHI (r ) =
(
1
A ruuuu
2 ∫R
2
+ B ruuuu , ruuuv + C ruuuv
+ D ruuuu , ruvvv + E ruuvv
+ G ruvvv
2
2
The Bézier surface r (u , v) can be expressed by the power
basis as:
n
n
aij i j
(2)
r (u , v) ∑
=
=
Bin (u )B nj (v) Pij ∑
uv .
=
i , j 0=
i, j 0 i ! j !
Then by simple computing, Eq.(1) can be written as:
Aai +8, j + Bai + 7, j +1 + Cai + 6, j + 2 + Dai + 5, j + 3 + Eai + 4, j + 4
(3)
+ Fai + 3, j + 5 + Gai + 2, j + 6 + Hai +1, j + 7 + Iai , j +8 =
0,
2
+ F ruuuv , rvvvv
+ H ruvvv , rvvvv + I rvvvv
2
) dudv.
Its Euler-Lagrange equation is
∂8 r
∂8 r
∂8 r
∂8 r
∂8 r
A 8 + B 7 +C 6 2 + D 5 3 + E 4 4
∂u
∂u ∂v
∂u ∂v
∂u ∂v
∂u ∂v
∂8 r
∂8 r
∂8 r
∂8 r
+F 3 5 + G 2 6 + H
+I 8 =
0.
∂u ∂v
∂u ∂v
∂u∂v 7
∂v
Next we will solve Eq.(1) and get its Bézier solution.
(1)
(
2
)dudv ,
( n +1)× ( n +1)
, then {Pij }in, j = 0 can be
B. Solution of the Problem
F104060401 (r ) = Ftetrahar (r ) .
When A= B= C= D= F= G= H= I= 0, E= 1 ,
1
ruuvv
2 ∫R
compute the matrix ( aij )
obtained by a transformation matrix from power basis to
Bernstein basis.
When A= I= 1, C= G= 4, E= 6, B= D= F= 0,
functional is F (r ) =
where i, j = 0,1, , n , aij = 0 for i > n or j > n . If we can
the
1) Solving the First Two Row/ Column Elements of the
Matrix ( aij )
( n +1)× ( n +1)
its Euler-Lagrange
Taking u = 0 in Eq.(2), we have
equation is
n
n
0j
j
=j 0=j 0
The problem can be strictly described by mathematical
form as follows:
{P }
n −1
{P }
n −1
n
n n − i
, cin, j = (−1) j
, we
i j
n
n
k
k 0
=
0k
j
=j 0=l 0
n
l , j −l
P0l v j .
j
=
a0 j j=
!∑ cln, j −l P0l, j 0,..., n.
(4)
l =0
Analogously, taking v = 0 in Eq.(2), we have
i
=
ai 0 i =
!∑ cln,i −l Pl 0, i 0,..., n.
(5)
l =0
So we can get
{a }
0j
n
j =0
and
{ai 0 }i =0
n
from
{P }
0j
n
j =0
and
{ Pi 0 }i =0 .
n
On the other hand, we have
{P }
{ Pi1}i =1 { Pi , n −1}i =1 ,
n −1
v j.
Thus
and the control points inside:
{P }
v
j!
B (v ) P
=
∑
∑∑c
r (0, v)
=
n
n
n
n
0 j j 0=
nj j 0 =
i 0 i 0=
in i 0
=
1 j j 1=
n −1, j j 1
=
j =0
n i+ j
i, j
a0 j
have
Given the control points of the boundaries:
{P }
n −i
∑c
According to Bin (v) =
III. BÉZIER SOLUTION of the GENERAL 8TH-ORDER
EULER-LAGRANGE EQUATION
Monterde showed that given two opposed boundaries, there
is a unique harmonic Bézier surface ( ∆r = 0 ) with prescribed
boundaries [11], and given four boundaries, there is a unique
biharmonic Bézier surface ( ∆ 2 r = 0 ) with prescribed
boundaries [13]. Centella and Monterde showed that given the
boundary position and boundary tangent vector conditions,
there is a unique tetraharmonic Bézier surface ( ∆ 4 r = 0 ) with
prescribed boundaries. The problem we need to solve is that
given the boundary position and boundary tangent vector
conditions, how to construct a Bézier surface satisfying a
general 8th-order PDE.
{P }
n
=
B (v ) P
∑
∑
r (0, v)
=
∂8 r
= 0.
∂u 4 ∂v 4
In section Ⅳ we will show that the Bézier solution of this
functional is just the Coons bicubic blending surface.
n −1
which are adjacent to the boundary of an n × n net
{P }
n
ij i , j = 0
,
to find a Bézier surface r (u , v) satisfying Eq.(1), and its
control net includes the abovemetioned control points.
A. Analysis of the Problem
At first, we need to obtain the unknown control points
{Pij }in,−j 2= 2 of the Bézier surface r (u , v) . Here we work with the
power basis.
*
*
* a 0k
a00 a01 a02 a03
*
* a1,k-1 *
a10 a11 a12 a13
a20 a21 a22 a23
* a 2,k-2 *
*
*
*
a30 a31 a32 a33 a 3,k-3 *
*
* a k-3,3
*
*
*
*
*
*
* a k-2,2 *
*
*
*
*
*
*
*
0
* a k-1,1 *
a
*
0
0
*
*
*
k0
*
a
a
a
a
a
0
0
0
n−1,0 n−1,1 n−1,2 n−1,3 n−1,4
a
0
0
0
0
n 0 an1 an 2 an3
Fig. 1 The (n + 1) × (n + 1) matrix
C 2012 World Academic Publishing
CISME Vol.2 No.1 2012 PP.10-17 www.jcisme.org ○
- 11 -
a0,n−1
a1,n−1
a2,n−1
a3,n−1
a4,n−1
*
0
0
0
0
0
a0 n
a1n
a2 n
a3 n
0
0
0
0
0
0
Communications in Information Science and Management Engineering (CISME)
x = ( a k-4,4
n
∂r
=
( 0, v ) n∑ B nj (v) ( P1 j − P0 j )
∂u
j =0
n a
j
1j
P0l ) v j ∑ v j ,
= n∑ ∑ cln, j −l ( P1l −=
=j 0=
l 0
=j 0 j !
n
thus
j
=
a1 j j !n∑ cln, j −l ( P1l − P0l=
) , j 0,..., n.
(6)
l =0
Analogously, we have
i
ai1 i !n∑ cln,i −l ( Pl1 − Pl 0 )=
=
, i 0,..., n.
(7)
l =0
So
we
{P } , {P }
n
0j
j =0
1j
can
n −1
j =1
get
and
{a }
0j
n
and
j =0
{ai 0 }i =0
n
from
a 3,k -3 , a 2,k -2 , a1,k -1 and a 0,k are all zeros ( aij = 0 for
thus
Now we have already obtained the first two row and
( n +1)× ( n +1)
T
− Aa k0 − Ba k-1,1 − C a k-2,2 − Da k-3,3
− Aa k-1,1 − Ba k-2,2 − C a k-3,3
.
b=
−Ga k-3,3 − H a k-2,2 − I a k-1,1
− F a 3,k-3 − Ga 2,k-2 − H a1,k-1 − I a 0k
Note that the first four and last four elements in vector
b are known and other elements are zeros. Then the linear
system has k − 7 equations and k − 7 unknowns, and the
coefficient matrix M k − 7 is non-singular. So the system has a
unique solution.
i>n
{ Pi 0 }i =0 , { Pi1}i =1 .
column elements of the matrix ( aij )
a 4,k-4 ) ,
Remark 1: when k =i + j ≥ n + 4 , a k0 , a k -1,1 , a k -2,2 , a k -3,3 ,
n −1
n
a k-5,5 , a 5,k-5
.
or
j>n
),
b=0
so
a k -4,4 = a k -5,5 = = a 5,k -5 = a 4,k -4 = 0
,
we
,
have
aij = 0, i + j = k ≥ n + 4 . Actually the lemma is similar to a
lemma in [15].
Next, let us complete the computation of the other elements
of matrix ( aij )
.
( n +1)× ( n +1)
Taking u = 1 in Eq.(2), we have
n
n
n
j n
j
1 n aij j
n
=
=
=
r
P
P
v
B
v
c
v
(1,
)
(
)
∑ v ,
∑
∑
∑
∑
j
nj
l
j
l
nl
−
,
Note the k × k matrix M k is as follows and the
=j 0
=j 0=
l 0
=j 0 j !=
i 0 i!
(n + 1) × (n + 1) matrix is shown in Fig. 1.
thus
2)
Solving Other Elements of the Matrix
(a )
ij ( n +1)× ( n +1)
Lemma 1: let k ≥ 8 , assume the matrix M k − 7 is
non-singular.
If
the
elements
a k0 , a k -1,1 , a k -2,2 , a k -3,3 , a 3,k -3 , a 2,k -2 , a1,k -1 and a 0,k are
given, then the other elements
(8)
Analogously, taking v = 1 in Eq.(2), we have
a i, j , i, j ≥ 4 , on the
anti-diagonal line i + j =
k , can be solved uniquely. That is,
the linear system given by Eq.(3) (when i + j + 8 =
k ) has a
unique solution.
E F G H I 0
D E F G H I
C D E F G H
B C D E F G
A B C D E F
0 A B C D E
Mk =
0 0 0 0 0 0
0 0 0 0 0 0
0 0 0 0 0 0
0 0 0 0 0 0
0 0 0 0 0 0
Proof: Assume that i + j + 8 =
k
linear system M k − 7 x = b ,where
n a
j
ij
! ∑ cln, j −l Pnl , j 0,..., n.
j=
=
∑
!
i
=i 0=
l 0
n a
i
ij
i=
! ∑ cln,i −l Pln , i 0,..., n.
=
∑
j!
=j 0=
l 0
Also we have
n
∂r
=
(1, v ) n∑ B nj (v) ( Pnj − Pn −1, j )
∂u
j =0
(9)
0 0 0 0 0
0 0 0 0 0
0 0 0 0 0
j
n
n
j
1 n aij j
0 0 0 0 0 = n cn ( P − P =
v
)
v ,
∑∑
∑ ∑
l , j −l
nl
n −1, l
=j 0=
l 0
=j 0 j !=
i 1 (i − 1)!
0 0 0 0 0
thus
0 0 0 0 0
j
n
aij
=
j
!
n
cln, j −l ( Pnl − Pn −1,l ) ,=
j 0,..., n. (10)
∑
∑
E F G H I
(i − 1)!
=i 1 =
l 0
D E F G H
Analogously, we have
C D E F G
B C D E F
n
i
aij
(11)
= i !n∑ cln,i −l ( Pln − Pl , n −1 ) , =
i 0,..., n.
A B C D E
∑
( j − 1)!
=j 1 =
l 0
in Eq.(3), then we have the
Eq.(8) can be written as
a2j a3j
j
a0 j + a1 j +
j ! ∑ cln, j −l Pnl .
+
+ =
2
6
l =0
C 2012 World Academic Publishing
CISME Vol.2 No.1 2012 PP.10-17 www.jcisme.org ○
- 12 -
Communications in Information Science and Management Engineering (CISME)
Eq.(10) can be written as
j
a3j a4 j
a1 j + a2j + =
+
+ j !n∑ cln, j −l ( Pnl − Pn −1,l ) .
2
6
l =0
Noticing that the right sides are known in both equations,
a0 j and a1 j in the left side can be obtained by Eq.(4) and (6).
Thus if a4 j , a5 j , , anj are also known, then we have a
linear system formed by these two equations whose unknowns
are a2 j and a3 j . We denote by S j this system. This system
has a unique solution because the determinant of its coefficient
matrix
1 / 2 1 / 6
,
1 1/ 2
involves the computation of elements
Ri
where k + l =
i.
(a )
{ P } , { P } , { P } , { P } , by
anti-diagonal line of matrix
1
≠ 0 . Analogously, from Eq.(9) and (11) we have a
12
system denoted by Si with unknowns ai 2 and ai 3 .
Notice that we know aij = 0, i + j ≥ n + 4 from Remark 1
and aij = 0 for i > n or j > n from Eq.(3).
Step Qn + 3 . From
nj
At first, we solve S and S n . Note that we have already
known a0n , a1n , an 0 and an1 , and a4=
a5=
= ann= 0 ,
n
n
an=
an=
= ann= 0 (by Remark 1), so a2 n , a3n , an 2 , an 3
4
5
Step Qn + 2 . From
{P }
S n −1 and S n −1 . Note that we know
,
,
,
and
an−1,0
an−1,1
a5, n −=
a6, n −=
= an , n −=
0 , an −1,5= an −1,6=
= an −1,=
0
1
1
1
n
by Remark 1, and a4, n−1 , an−1,4 are obtained from the above
step, so a2, n −1,,,
a3, n −1 an −1,2 an −1,3 can be obtained by S n −1
and
.
As
we
know
S n −1
an=
a=
0 , an 2 , an −1,3 , a3, n −1 , a2 n , a=
a=
0 ,
+ 2,0
n +1,1
1, n +1
0, n + 2
according to Lemma 1, we can obtain aij for i + j = n + 2 .
Remark 2. In the abovementioned solution process, according
to Lemma 1, M k is non-singular for 0 < k ≤ n − 4 , so
E ≠ 0 is required.
The algorithm for computing aij can be summarized as
follows:
{P } , {P } , {P }
{a } , {a } , {a }
n
0j
j =0
n
i 0 i =0
n
i 0 i =0
1j
, { Pi 0 }i = 0 , { Pi1}i =1 and
n −1
n
j =1
and
n
j =0
{ Pi1}i =1 ,
and
n −1
we can
{ai1}i =0
n
n −l + 6
, {al − 3, j }
n −l + 6
j =4
n
{P }
n −1
and
i , n −1 i =1
, by solving S l −3 and Sl −3 , we can
compute a2,l −3 , a3,l −3 , al −3,2 and al −3,3 .
Step Rl . By Lemma 1, solving the linear system for k = l ,
we can compute aij for i + j =
l.
Q7 . From
Step
n −1
i ,4 i = 4
{P }
nj
4, j
n −1
j =4
n
j =0
, { Pn −1, j }
n −1
j =1
, { Pin }i = 0 , { Pi , n −1}i =1 and
n −1
n
, by solving S 4 and S 4 , we can compute
Step Q6 . From
{P }
{a } , {a }
,by solving S 3 and S3 , we can compute
n
i ,3 i = 4
3, j
n
j =4
nj
n
j =0
, { Pn −1, j }
n −1
j =1
, { Pin }i = 0 ,
n
{P }
n −1
i , n −1 i =1
and
a23 , a33 , a32 and a33 .
Step Q5 . Notice that now only a22 is unknown, thus it can
be computed by S 2 or S 2 . Actually the two results are the
same.
Note that in Step Q6 , a33 can be obtained by both S 3
and S3 . We must check for compatibility.
We first compute a33 by S 3 . S 3 is as follows:
n ai 3
3
= 6 ∑ cln,3− l Pnl
∑
i!
i 0=
=
l 0
,
n
3
a
i3
6n∑ cln,3− l ( Pnl − Pn −1,l )
=
∑
(i − 1)!
l 0
=
i 1=
with two unknowns a23 and a33 . From the abovementioned
system we have
3
3
1
−=
a33 12∑ cln,3− l Pnl − 6n∑ cln,3− l ( Pnl − Pn −1,l )
6
l 0=l 0
=
n
2−i
− 2a03 − a13 − ∑
ai 3 .
i!
i =4
by
Eq.(4),(5),(6),(7).
We introduce the notations Qi and Ri . Qi involves
the computation of a2,i −3 , a3,i −3 , ai −3,2 , ai −3,3 ,
n −1
n
By this way, starting from k = n and working recursively
backwards until k = 2 , we can obtain all aij .
compute
n −1
Step Ql . From { Pnj } , { Pn −1, j } , { Pin }i = 0 ,
j =0
j =1
a24 , a34 , a43 and a42 .
j =1
, { P1 j }
according to Lemma 1, we can obtain aij for i + j = n + 3 .
1j
j =0
Step Rn + 2 . By Lemma 1, solving the linear system for
k= n + 2 , we can compute aij for i + j = n + 2 .
{a } , {a }
j =0
n
0j
can be obtained by S and S n . As we know
a=
a=
0, an 3 , a3n ,
a=
a=
a=
0 , a=
2, n +1
1, n + 2
0, n + 3
n + 3,0
n + 2,1
n +1,2
0j
i , n −1 i =1
a4, n−1 , an−1,4 (by Step Rn + 3 ), by solving S n −1 and S n −1 , we
n
Step 0. From
n −1
n
in i = 0
j =1
Step Rn + 3 . By Lemma 1, solve the linear system for
k= n + 3 , we can compute aij for i + j = n + 3 .
i ,l − 3 i = 4
n
n −1
n −1
n −1, j
j =0
solving S n and S n , we can compute a2n , a3n , an 2 and an 3 .
{a }
We can solve the system S k and S k by starting from
k = n and working recursively backwards until k = 2 .
n
ij ( n +1)*( n +1)
n
can compute a2, n−1 , a3, n−1 , an−1,2 and an−1,3 .
is
Next, we solve
,
a0, n−1
a1, n−1
in the
akl
From Eq.(4) and (6), we have
C 2012 World Academic Publishing
CISME Vol.2 No.1 2012 PP.10-17 www.jcisme.org ○
- 13 -
(12)
Communications in Information Science and Management Engineering (CISME)
3
3
=
a03 6∑ =
cln,3− l P0l , a13 6n∑ cln,3− l ( P1l − P0l ) .
(13)
=l 0=l 0
−6n∑ cln,3−l ( Pl1 − Pl 0 ) − 6∑ ( (2 − n)δ ln + nδ ln −1 ) ( (2 − n) P0l
3
By solving Si , we have
i
a=
6 2ai 0 + ai1 − i !∑ cln,i − l ( (2 − n) Pln + nPl , n −1 )
i3
l =0
n
2− j
+∑
aij , i ≥ 4.
j!
j =4
n
2−i
n
i3
i 4=i 4
n
=l 0=l 0
3 3
+ nP1l − (2 − n) Pnl − nPn −1,l ) + 6∑ ∑ (2 − i )cln, j −l ( (2 − n) P0l
=l 0=
j l
n
n
(2 − j )(2 − i )
+ nP1l − (2 − n) Pnl − nPn −1,l ) − 6∑∑
aij
j !i !
=j 4=i 4
(14)
Thus
a
=
∑
∑
i!
3
3
3
1
a33 12∑ cln,3−l Pln − 6n∑ cln,3−l ( Pln − Pl , n −1 ) − 12∑ cln,3−l Pl 0
−=
6
=
=l 0
l 0=l 0
i
2−i
6 2ai 0 + ai1 − i !∑ cln,i − l ( (2 − n) Pln
i ! =l 0
By comparing the
coefficients of each
Pij
in the
abovementioned two equations, it is easy to know that both
a33 are the same.
Analogously, we can check the compatibility of a22 in
Step Q5 by the similar way.
2− j
aij
+ nPl , n −1 ) + ∑
j!
j =4
n
i
i n
6∑ (2 − i ) 2∑ cl ,i − l Pl 0 + n∑ cln,i − l ( Pl1 − Pl 0 )
=
=i 4=
l 0 =l 0
n
3)
1 n 2− j
aij
∑
i
!
j
!
l 0=j 4
n
i n
= 6∑ (2 − i ) ∑ cl ,i − l ( (2 − n) Pl 0 + nPl1 − (2 − n) Pln
=i 4=
l 0
n
n
(2 − i )(2 − j )
aij
− nPl , n −1 ) + 6∑ ∑
i! j!
=i 4=j 4
i
−∑ cln,i − l ( (2 − n) Pln + nPl , n −1 ) +
Solving the Unknown Control Points
We have obtained all the coefficients
(a )
n
ij i , j = 0
of Bézier
surface in the power basis, by a transformation matrix from
power basis to Bernstein basis, we can obtain all the control
)
points
{P }
n
ij i , j = 0
.
( )
n
n
= 6∑ ∑ (2 − i )cln,i − l ( (2 − n) Pl 0 + nPl1 − (2 − n) Pln
from power basis
The transformation matrix f ij
( n +1)× ( n +1)
=l 0=
i l
to Bernstein basis [16] is
3
3
− nPl , n −1 ) − 6∑ ∑ (2 − i )cln,i − l ( (2 − n) Pl 0 + nPl1
=l 0=
i l
i < j,
0
n
n
(2 −=
i )(2 − j )
f
=
i, j 0,1,..., n.
n
−
j
n
aij .
− (2 − n) Pln − nPl , n −1 ) + 6∑ ∑
ij
(15)
i ≥ j,
i! j!
i − j i
=i 4=j 4
n −i
Using Bin (v) = ∑ cin, j v i + j , we have
So we can easily obtain
j =0
n
∑ (2 − i)c
=
n −l
∑ ( 2 − (i + l ) ) c=
n
l ,i − l
=i l =i 0
n
l ,i
2 Bln (1) −
=
2 Bln (1) − n ( Bln−−11 (1) − Bln −1 (1) )
(P )
∂ n
Bl (1)
∂v
ij ( n +1)× ( n +1)
(16)
=
2δ ln − n (δ ln−−11 − δ ln −1 ) =
(2 − n)δ ln + nδ ln −1 .
Using Eq.(16), Eq.(15) can be written as
n
2−i
ai 3= 6∑ ( (2 − n)δ ln + nδ ln −1 ) ( (2 − n) Pl 0 + nPl1
∑
i!
i 4=
l 0
n
3
3
(17)
−(2 − n) Pln − nPl , n −1 ) − 6∑ ∑ (2 − i )cln,i −l ( (2 − n) Pl 0
=l 0=
i l
n
n
(2 − i )(2 − j )
+ nPl1 − (2 − n) Pln − nPl , n −1 ) + 6∑∑
aij .
i! j!
=i 4=j 4
Thus by Eq. (13) and (17), Eq.(12) can be expressed as
3
3
3
1
−=
a33 12∑ cln,3−l Pnl − 6n∑ cln,3−l ( Pnl − Pn −1,l ) − 12∑ cln,3−l P0l
6
=
=l 0
l 0=l 0
= ( f ij )
T
aij
( f )
.
ij
( n +1)× ( n +1) i ! j !
( n +1)× ( n +1)
( n +1)×( n +1)
IV. EXAMPLES
In this section, we show that some existing surfaces, such
as Coons bicubic blending surfaces and tetraharmonic Bézier
surfaces, are the special cases of our results. Then we provide
several examples from different aspects. In all the figures,
hollow points are the boundary control points, and solid points
are those adjacent to them.
When A= B= C= D= F= G= H= I= 0 , E = 1 , the
matrix M n is the identity matrix, thus according to Lemma 1
we know that the problem has a unique solution, and aij = 0
if i > 3 and j > 3 . So the surface can be expressed in power
basis as follows:
− 6n∑ cln,3−l ( P1l − P0l ) − 6∑ ( (2 − n)δ ln + nδ ln −1 ) ( (2 − n) Pl 0
3
n
l 0=l 0
3
3
+ nPl1 − (2 − n) Pln − nPl , n −1 ) + 6∑ ∑ (2 − i )cln,i −l ( (2 − n) Pl 0
=l 0=
i l
n n
(2 − i )(2 − j )
+ nPl1 − (2 − n) Pln − nPl , n −1 ) − 6∑∑
aij .
i! j!
=i 4=j 4
Analogously, from system S3 , we have
(18)
For Coons bicubic blending surfaces which interpolate
boundary location and boundary tangent vector, we introduce
the following notations.
Denote by uv the surface r (u , v) , and 0v , 1v; u0, u1
four boundary curves on u and v direction. And let
C 2012 World Academic Publishing
CISME Vol.2 No.1 2012 PP.10-17 www.jcisme.org ○
- 14 -
Communications in Information Science and Management Engineering (CISME)
∂r (u , v) ∂u
0vu , 1vu ; u0v , u1v ( 0vu =
tangent curves.
u =0
) be the four boundary
Example 1, but the endothecium control points are lower than
in Example 1, thus the central part of the surface will sink.
Then the Coons bicubic blending surface can be expressed
as
(19)
P1 ⊕ P2 r (u , v) = P1r (u , v) + P2 r (u, v) − P1 P2 r (u, v),
where
P1r (u , v) = ( F0 (u ), F1 (u ), G0 (u ), G1 (u ) )( 0v , 1v , 0vu , 1vu ) ,
T
P2 r (u , v) = ( u0, u1, u0v , u1v )( F0 (v), F1 (v), G0 (v), G1 (v) ) ,
T
P1 P2 r (u , v) = ( F0 (u ), F1 (u ), G0 (u ), G1 (u ) )
00
10
⋅
00u
10u
01
11
01u
00v
10v
00uv
11u
10uv
01v F0 (v)
11v F1 (v) ,
01uv G0 (v)
11uv G1 (v)
( F0 (u ), F1 (u ), G0 (u ), G1 (u ) ) =( (u − 1)2 (1 + 2u ),
u 2 (3 − 2u ), u (u − 1) 2 , u 2 (u − 1) ) .
.
By comparing the coefficients of the same terms in Eq.(18)
and (19), it shows that these two equations are the same. Thus
we know that the Coons bicubic blending surface r (u , v)
satisfies
∂8 r
= 0.
∂u 4 ∂v 4
When A= I= 1 , C= G= 4 , E = 6 , B= D= F= 0 , the
PDE is
∂8 r
∂8 r
∂8 r
∂8 r
∂8 r
+
4
+
6
+
4
+
=
0,
∂u 8
∂u 6 ∂v 2
∂u 4 ∂v 4
∂u 2 ∂v 6 ∂v8
i.e. ∆ 4 r =
0 , thus the solution surface is the tetraharmonic
Bézier surface [15].
Fig.3 The boundary and endothecium control points and the corresponding
Bézier surface.
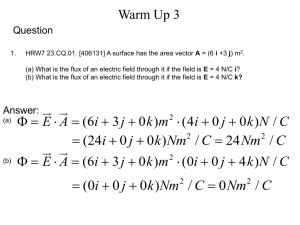
Example 3. The coefficients of the 8th-order PDE
are A= I= 1 , B
= H= 2 , C= G= 3 , D= F= 4 , E = 5 , n = 9 .
See Fig.4 and Fig.5. In Fig.4, from top to bottom, the 1-st, 3-rd
and 5-th sub-figure shows the given control nets respectively,
in which the boundary control points are same each other, and
the endothecium control points can be regarded as that the
boundary control points are moved upwards by the fixed length
a , a = 0.5, 1, 2 correspond to the top, mid, bottom figure,
respectively. From the 2-nd, 4-th and 6-th sub-figure, it is easy
to know that the top part of the surface is flatter when a is
bigger. In Fig.5, from top to bottom, the 1-st sub-figure is for
a = 4 , and 2-nd sub-figure is for a = 8 . We can see that when
a is big enough, the top part of the surface will sink.
The following are several examples.
Example 1. The coefficients of the 8th-order PDE
are A= I= 1 , B
= H= 2 , C= G= 3 , D= F= 4 , E = 5 , n = 9 .
See Fig.2. It is a cylinder-like surface.
Fig.2 The boundary and endothecium control points and the corresponding
Bézier surface.
Example 2. The coefficients of the 8th-order PDE
are A= I= 1 , B
= H= 2 , C= G= 3 , D= F= 4 , E = 5 , n = 9 .
See Fig.3. The boundary control points are the same as in
C 2012 World Academic Publishing
CISME Vol.2 No.1 2012 PP.10-17 www.jcisme.org ○
- 15 -
Communications in Information Science and Management Engineering (CISME)
Boundary control points and endothecium control points.
=
A 0,=
E 4
Fig.4 The boundary and endothecium control points and the corresponding
Bézier surface. a = 0.5, 1, 2 correspond to the top, mid, bottom.
=
A 0.5,
=
E 4
The abovementioned three examples are based on the same
PDE with different conditions for boundary location and
boundary tangent vector. When the PDE keeps unchanged, the
shape of Bézier surface depends on the boundary conditions. In
Example 3, we keep the boundary location unchanged and
change the boundary tangent vector, many shapes can be
obtained.
=
A 1,=
E 4
A=
−0.2, E =
4
Fig.5 The corresponding Bézier surface for a = 4 and the corresponding
Bézier surface for a = 8 .
Example 4 shows the problem in another aspect, that is,
keep the boundary conditions unchanged and change the
coefficients of the PDE. Here, we change only one coefficient.
A=
−0.2, E =
4
Fig.6 The uppest figure shows given control net. The other five figures show
the corresponding surfaces to different PDEs. The coefficients of PDE are all
zeros except A and E with only A changed.
C 2012 World Academic Publishing
CISME Vol.2 No.1 2012 PP.10-17 www.jcisme.org ○
- 16 -
Communications in Information Science and Management Engineering (CISME)
V. CONCLUSION
In this paper, we present a general 8th-order PDE method
for generating Bézier surfaces from boundary curves and
tangent conditions along the boundary. We study the general
4th-order quadratic functional, and present the Bézier solution
of the corresponding Euler-Lagrange equation, and provide a
specific algorithm for generating Bézier surfaces satisfying the
Euler-Lagrange equation. Furthermore we point out that
several existing surfaces, such as Coons bicubic blending
surfaces and tetraharmonic Bézier surfaces are the special cases
of our results. Finally we present several examples to show that
our method has more degrees of freedom to change the surface
shape.
=
E 4,=
I 2
ACKNOWLEDGMENT
This Project is supported by National Nature Science
Foundation of China (No.60933007 and 61070065)
REFERENCES
=
E 4,=
I 3
[1]
[2]
[3]
[4]
[5]
[6]
E = 4, I = −1
[7]
[8]
[9]
[10]
E = 4, I = −1.5
Fig.7 The four figures have the same given conditions with Fig.6. They
correspond to different PDEs with coefficients under them. All the
coefficients are zeros except E and I with only I changed.
[11]
Example 4. See Fig.6 and Fig.7. The coefficients of the
PDE can be seen in each figure. In Fig.6, only A changes.
From Fig.6 we can see that when A > 0 , the middle part of the
surface sinks, and the larger A becomes, the more the surface
sinks. when A < 0 , the middle part raises, and the smaller A
becomes, the more the surface raises. In Fig.7, only I
changes. From the top two figures, we can see that when
I > 0 , the middle part of the surface raises, and the larger I
becomes, the more the surface raises; from the bottom two
figures, when I < 0 , the middle part sinks, and the smaller I
becomes, the more the surface sinks.
[12]
[13]
[14]
[15]
[16]
M. I. G. Bloor, M. J. Wilson, Generating blend surfaces using Partial
Differential Equations. Computer Aided Design, 21(3), 165-171, 1989.
M. I. G. Bloor, M. J. Wilson, Blend design as a boundary-value problem.
Geometrical Modeling: Theory and Practise Springer-Verlag, 1989.
M. I. G. Bloor, M. J. Wilson, Using partial differential equations to
generate free-form surfaces. Computer Aided Design, 22(4), 202-212,
1990.
M. I. G. Bloor, M. J. Wilson, Representing PDE surfaces in terms of
B-Splines. Computer Aided Design, 22(6): 324-331, 1990.
M. I. G. Bloor, M. J. Wilson, Spectral approximations to PDE surfaces.
Computer Aided Design, 28(2): 145-152, 1996.
M. I. G. Bloor, M. J. Wilson, An analytic pseudo-spectral method to
generate a regular 4-sided PDE surface patch. Computer Aided
Geometric Design, 22(3): 203-219, 2005.
H. Ugail, On the spine of a PDE surface. In: Wilson MJ, Martin RR,
editors. Mathematics of Surfaces X. Berlin: Springer; pp. 366-376,
2003.
J. J. Zhang, L. H. You, Surface representation using second, fourth and
mixed order partial differential equations. International conference on
Shape Modeling and Applications, Genova, Italy, 5-7 May, 2001.
H. Ugail, M. I. G. Bloor, M. J. Wilson, Techniques for interactive
design using the PDE method. ACM Transactions on Graphics, 18(2),
195-212, 1999.
H. X. Du, H. Qin, Dynamic PDE-based surface design using geometric
and physical constraints. Graphical Models, 67, 43-71, 2005.
J. Monterde, The Plateau-Bézier Problem. In: Wilson,M.J.,
Martin,R.R.(Eds.), Mathematics of Surfaces X. In: Lecture Notes int
Compu. Sci., vol. 2768. Springer, Berlin, pp. 262-273, 2003.
J. Monterde, Bézier surfaces of minimal area: The Dirichlet approach.
Computer Aided Geometric Design, 21(2), 117-136, 2004.
J. Monterde, H. Ugail, On harmonic and biharmonic Bézier surfaces.
Computer Aided Geometric Design, 21(7), 697-715, 2004.
J. Monterde, H. Ugail, A general 4th-order PDE method to generate
Bézier surfaces from the boundary. Computer Aided Geometric Design,
23(2), 208-225, 2006.
P. Centella, J. Monterde, E. Moreno, R. Oset, Two C1-methods to
generate Bézier surfaces from the boundary. Computer Aided Geometric
Design, 26(2), 152-173, 2009.
G. J. Wang, G. Z. Wang, J. M. Zheng, Computer Aided Geometric
Design [M]. Beijing: Higher Education Press, 14-15, in Chinese, 2001.
Naturally, we guess that the coefficients A and I have
the opposite property on the surface shape control.
C 2012 World Academic Publishing
CISME Vol.2 No.1 2012 PP.10-17 www.jcisme.org ○
- 17 -