Sharp bounds on the approximation of a Bézier polynomial Ren-Jiang Zhang
advertisement

Computer Aided Geometric Design 23 (2006) 1–16
www.elsevier.com/locate/cagd
Sharp bounds on the approximation of a Bézier polynomial
by its quasi-control polygon
Ren-Jiang Zhang a,b,∗ , Guo-Jin Wang b
a China Jiliang University, Zhejiang, Hangzhou 310018, PR China
b State Key Laboratory of CAD&CG, Zhejiang University, Hangzhou 310027, PR China
Received 11 February 2004; received in revised form 30 March 2005; accepted 1 April 2005
Available online 13 May 2005
Abstract
By connecting the points which are the kind of linear combinations of Bézier control points, a broken line polygon called quasi-control polygon is produced. Using it to approximate Bézier segment, this paper obtains two
sharp, quantitative bounds, besides depending on the degree of the polynomial, the bounds depend only on the
maximal absolute second differences or the sum of absolute second differences of the control point sequence respectively. The advantage of this method is hardly increasing calculation, the effect of using quasi-control polygon
to approximate is better than that of using control polygon to approximate.
2005 Elsevier B.V. All rights reserved.
Keywords: Bézier curves; Intersection testing; Sharp bounds; Approximation
1. Introduction
For some applications, e.g., rendering, intersection testing or design, many specialists investigated the
problem on approximating Bézier curves by the broken line or its control polygons. Lane and Riesenfeld
(1980) proposed a convergence test for piecewise linear approximation of parametric Bézier curves and
later this test was improved by Wang and Xu (1991) and by Zhang and Wang (2003). Filip et al. (1986)
derived the bound on the distance between a curve and the line segment connecting two endpoints of
* Corresponding author.
E-mail address: zrj@cjlu.edu.cn (R.-J. Zhang).
0167-8396/$ – see front matter 2005 Elsevier B.V. All rights reserved.
doi:10.1016/j.cagd.2005.04.010
2
R.-J. Zhang, G.-J. Wang / Computer Aided Geometric Design 23 (2006) 1–16
the curve. Nairn et al. (1999) obtained sharp, quantitative bounds on the distance between a polynomial
piece and its Bézier control polygon. This pioneering paper is taken more attraction, and next Reif (2000)
generalized it to the case of surface and gave a very elegant proof for Nairn et al.’s result. Lutterkort and
Peters (2001) developed a framework for efficiently computing enclosures for multivariate polynomials.
Thus, how can we give better approximation as possible as less increasing calculation? In this paper we
use a broken line polygon called quasi-control polygon produced by connecting the points which are
the linear combinations of the Bézier control points to approximate the polynomial and then obtain two
sharp, quantitative bounds, besides depending on the degree of the polynomial, the bounds depend only
on the maximal absolute second differences or the sum of absolute second differences of the control
point sequence respectively. The advantage of this method is hardly increasing calculation, the effect of
using quasi-control polygon to approximate is better than that of using control polygon to approximate.
In particular, both bounds are much less for the lower degree of the polynomial. Some definitions are as
follows in order.
A univariate, scalar-valued polynomial p(t) of degree n is in Bézier–Bernstein form if
p(t) :=
n
bi Bin (t),
t ∈ [0, 1],
i=0
where Bin (t) = ni (1 − t)n−i t i . The control polygon of p(t), denoted by l(t), is a broken line connecting
the points (ti , bi ), i = 0, 1, . . . , n. where the first components ti = i/n are the Greville abscissae, the
second components bi are called the Bézier ordinates. The ith centered second difference and its norm,
of bi , i = 0, 1, . . . , n, are respectively abbreviated as
2 bi := bi−1 − 2bi + bi+1 ,
2 b∞ := max |2 bi |.
0<i<n
Let
bk−1 + 2bk + bk+1
; cn = bn ; k = 1, 2, . . . , n − 1.
4
We call ci , i = 0, 1, . . . , n, are quasi-Bézier ordinates. Apparently, ck is the linear combination of bk .
ˆ
Finally, a broken line connecting the points (tk , ck ), k = 0, 1, . . . , n, denoted by l(t),
is called quasiˆ
control polygon. In this paper we use l(t) to approximate the Bézier polynomial p(t).
c0 = b0 ;
ck =
2. Main result
Nairn showed the following result:
p(t) − l(t)
N∞ (n)2 b∞ ,
∞,[0,1]
where
n2 n2 .
N∞ (n) :=
2n
ˆ the quasi-control polygon instead of l(t), to approximate
In the following, we will use the broken line l(t),
p(t), we obtain
R.-J. Zhang, G.-J. Wang / Computer Aided Geometric Design 23 (2006) 1–16
3
Theorem 1. The distance from the univariate, scalar-valued polynomial p(t) of degree n to its quasiˆ is bounded as
control polygon l(t)
p(t) − l(t)
ˆ M∞ (n)2 b∞ , n 2,
∞,[0,1]
where
M∞ (2) =
1
,
16
1
M∞ (n) = N∞ (n) − ,
4
n 3.
For comparison, we list M∞ (n) and N∞ (n) for n = 2, 3, . . . , 8 as follows.
1 1 1 3 3 6
, , , , , ,1 ,
N∞ (2), N∞ (3), . . . , N∞ (8) =
4 3 2 5 4 7
1 1 1 7 1 17 3
, , , , , ,
.
M∞ (2), M∞ (3), . . . , M∞ (8) =
16 12 4 20 2 28 4
We can see that N∞ (2) is four times as M∞ (2), N∞ (3) is four times as N∞ (3) and N∞ (4) is two times
as M∞ (4). Figs. 1–3 show the result of the comparison between approximating Bézier polynomial by the
control polygon and by the quasi-control polygon. The idea of proof of Theorem 1 partly comes from
(Nairn et al., 1999).
Proof. The proof for n = 2 can be easily derived from Theorem 3 in Section 3, so we suppose n 3 in
ˆ can be written as
the following. On the interval [tk , tk+1 ], l(t)
tk+1 − t
t − tk
+ ck+1
, k = 0, 1, . . . , n − 1.
lˆ[tk ,tk+1 ] (t) := ck
tk+1 − tk
tk+1 − tk
Thus,
P (t) − lˆ[tk ,tk+1 ] (t) =
n
α̂ki (t)bi ,
(1)
i=0
Fig. 1. A quadratic Bézier polynomial and its control polygon with Bézier ordinates sequence (b0 , b1 , b2 ) = (0, 1, 0), corresponding 2 b∞ = 2. The bound is taken on at t = 1/2, where p(1/2) − l(1/2) = 1/2 = N∞ (2)2 b∞ . Its
quasi-control polygon with Bézier ordinates sequence (c0 , c1 , c2 ) = (0, 1/2, 0). The bound is taken on at t = 1/4, where
ˆ
p(1/4) − l(1/4)
= 1/8 = M∞ (2)2 b∞ .
4
R.-J. Zhang, G.-J. Wang / Computer Aided Geometric Design 23 (2006) 1–16
Fig. 2. A cubic Bézier polynomial and its control polygon with Bézier ordinates sequence (b0 , b1 , b2 , b3 ) = (0, 1, 1, 0) and
corresponding 2 b∞ = 1. The bound is taken on at t = 1/3, where p(1/3) − l(1/3) = 1/3 = N∞ (3)2 b∞ . Its
quasi-control polygon with Bézier ordinates sequence (c0 , c1 , c2 , c3 ) = (0, 3/4, 3/4, 0). The bound is taken on at t = 1/3,
¯
where p(1/3) − l(1/3)
= 1/12 = M∞ (2)2 b∞ .
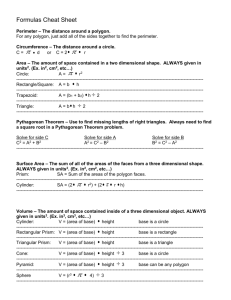
Fig. 3. The comparison of approximating Bézier polynomial by the control polygon and by the quasi-control. A cubic Bézier
polynomial and its control polygon with Bézier ordinates sequence (b0 , b1 , b2 , b3 ) = (0, 1, −1, 0), its quasi-control polygon
with Bézier ordinates sequence (c0 , c1 , c2 , c3 ) = (0, 1/4, −1/4, 0).
where
n
;
− 4 t + k+1
4
n
k+2
−4t + 4 ;
n
α̂ki (t) := Bi (t) − n t − k−1 ;
4
4
n
k
t
−
;
4
4
0
3
− 4 nt + 1;
1
nt;
α̂0i (t) := Bin (t) − 2
1
nt;
4
0
i = k − 1,
i = k,
i = k + 1,
i = k + 2,
else,
i = 0,
i = 1,
i = 2,
else,
k = 1, 2, . . . , n − 2.
k = 0.
We point out that the case for k = n − 1 does not need to be discussed again. Also it is evident that we just
need to investigate the cases for k n/2. In fact, the proof in the case for k > n/2 can be obtained
R.-J. Zhang, G.-J. Wang / Computer Aided Geometric Design 23 (2006) 1–16
5
immediately by introducing the transformation t = 1 − u. According to the definition of α̂0i (t), it is easy
to show the linear precisions
n
α̂ki (t) = 0,
i=0
n
i α̂ki (t) = 0.
i=0
Thus by Lemma A.1 in Appendix A, we know that there exists a group of β̂ki (t) (i = 1, 2, . . . , n − 1)
such that
P (t) − lˆ[tk ,tk+1 ] (t) =
n−1
β̂ki (t)2 bi .
(2)
i=1
Comparing the expression (1) with the expression (2), we can get β̂ki (t) as follows:
β̂ki (t) :=
i
n
(i − j )α̂kj (t) =
(j − i)α̂kj (t)
j =i
j =0
i
(i − j )Bjn (t),
j =0
i (i − j )B n (t) + n t − k+1 ,
j
4
4
= jn=0
n
k
n
(j − i)Bj (t) − 4 t + 4 ,
jn=i
n
j =i (j − i)Bj (t),
β̂ki (t) :=
i = k;
i = k + 1;
k + 2 i n − 1,
k = 1, 2, . . . , n − 2,
(3)
i
n
(i − j )α̂kj (t) =
(j − i)α̂kj (t)
j =i
j =0
=
1 i k − 1;
B0n (t) + 34 nt − 1
n
n
j =i+1 (j − i)Bj (t),
i = 1;
2 i n − 1,
k = 0.
(4)
Now we distinguish the following two cases:
(1) k = 1, 2, . . . , n − 2. In this case, from Lemma A.3 in Appendix A we know that the expressions
β̂ki (t) are all nonnegative on [tk , tk+1 ]. That is, β̂ki (t) 0 (k = 1, 2, . . . , n − 2; i = 1, 2, . . . , n − 1).
Furthermore, for k ∈ {1, 2, . . . , n − 2}, we have
n−1
i=1
j
n
n
n−1 n−1 n (j − i)α̂kj (t) =
(j − i)α̂kj (t) =
(j − i)α̂kj (t)
β̂ki (t) =
i=1 j =i
i=1 j =i+1
j =2 i=1
j −1 n n 1
j
j
i α̂kj (t) =
α̂kj (t) =
Bjn (t) − nkt + (2k 2 + 2k − 1)
=
4
2
2
j =2
i=0
j =2
j =2
1
n 2
=
t − nkt + (2k 2 + 2k − 1).
4
2
Thus, on the interval [tk , tk+1 ], n−1
i=1 β̂ki (t) is a positive quadratic polynomial with positive leading
coefficient and therefore takes on its maximum value either at the nodes tk or tk+1 implying
n
6
R.-J. Zhang, G.-J. Wang / Computer Aided Geometric Design 23 (2006) 1–16
n n i
i
β̂ki (t) = max max
max
max
α̂ki (tk ),
α̂ki (tk+1 )
1k<n−2 tk ttk+1
1k<n−2
2
2
i=1
i=2
i=2
2 k
1 n2 n2 1
n k
= max
=
− .
−
−
1k<n−2 2 n2
2
4
2n
4
Hence, using the abbreviated symbol · k which denotes · ∞,[tk ,tk+1 ] , the bound follows from
n−1
p(t) − l(t)
ˆ β̂
=
max
(t)
b
ki
2 i
∞,[1/n,1−1/n]
k i=1
n−1 k n n
2 2 1
−
β̂ki (t) =
2 b∞ max
2 b∞ .
k 2n
4
i=1
n−1
k
(2) k = 0. In this case, when n = 3, by Lemma A.2 in Appendix A, the theorem can be proved by
¯ be a broken line connecting the points
a direct calculation. In the following we suppose n 4. Let l(t)
¯
(tk , p(k/n)), k = 0, 1, . . . , n. Obviously l(t) interpolates the polynomial p(t) at the nodes tk (see Section 3). From Theorem 3 in Section 3, we have
P (t) − l(t)
¯ ˆ ˆ P (t) − l(t)
+ ¯l(t) − l(t)
[0,1/n]
[0,1/n]
[0,1/n]
1
n−1
1
2 b∞ + l¯
− lˆ
8n
n
n n−1
1 1
=
2 b∞ + P
− lˆ
.
8n
n
n Expression (2) implies that
n−1
1
1
1
=
P
ˆ
β̂
−
l
b
.
0i
2
i
n
n
n
i=1
By expression (4), it is easy to derive that
1
1 n 1
1
1
n 1
= α̂00
= B0
− = 1−
− > 0,
β̂01
n
n
n
4
n
4
and
n
1
1
β̂0i
=
> 0, i = 2, 3, . . . , n − 1.
(j − i)Bjn
n
n
j =i+1
Thus we have
n
n−1
n−1 1
1
1
1
P
2 b∞ =
β̂0i
− lˆ
(j − i)α̂0j
n
n
n
n
i=1
i=1 j =i+1
j −1
n n
j
1
1
n 1
2 b∞ =
−
Bj
=
2 b∞
(j − i) α̂0j
n
n
4
2
j =2
i=1
j =2
=
n−2
2 b∞ .
4n
R.-J. Zhang, G.-J. Wang / Computer Aided Geometric Design 23 (2006) 1–16
Therefore,
n n
2 2 1
n
−
1
n
−
2
P (t) − l(t)
ˆ
+
2 b∞ <
−
2 b∞ ,
[0,1/n]
8n
4n
2n
4
Combining case (1) with (2), we complete the proof. 2
7
n 4.
Corollary 1. The bounds shown in Theorem 1 are sharp for all degrees.
Proof. The proof is similar to that of Corollary 3.1 in the Nairn’s paper (Nairn et al., 1999).
2
The following theorem corresponds to Theorem 4.1 in the Nairn’s paper (Nairn et al., 1999).
Theorem 2. The distance from the univariate, scalar-valued polynomial p(t) of degree n to its quasiˆ is bounded as
control polygon l(t)
p(t) − l(t)
ˆ M1 (n)2 b1 , n 2,
∞,[0,1]
where
2 b1 =
n−1
|2 bi |,
i=1
√
3 3 5
M1 (3) =
− 0.0490,
4
4 n 1
1
n2 2 M1 (n) = N1 (n) − := 2N∞ (n)Bn
− ,
4
n
4
1
M1 (2) = ,
16
n 4.
M1 (n) and N1 (n) are listed as follows for comparison:
N1 (2), N1 (3), . . . , N1 (8) = (0.2500, 0.2963, 0.3750, 0.4147, 0.4688, 0.5036, 0.5469),
M1 (2), M1 (3), . . . , M1 (8) = (0.0625, 0.0490, 0.1250, 0.1647, 0.2188, 0.2536, 0.2969).
We can see that M1 (2) is four times smaller than N1 (2), M1 (3) is about six times smaller than N1 (3)
and M1 (4) is three times smaller than N1 (4). Fig. 3 shows the comparison of approximating Bézier
polynomial by the control polygon and by the its quasi-control.
Proof. The proof can be obtained by directly calculation when n = 2 and n = 3, so we omit it. In the
following, we suppose n 4. We distinguish two cases for k.
(1) k = 1, 2, . . . , n − 2. In this case, from the proof of Theorem 1, we know that
n−1
p(t) − l(t)
ˆ β̂
=
max
(t)
b
ki
2 i max max β̂ki (t) k 2 b1 .
∞,[1/n,1−1/n]
k k
i
i=1
k
By the symmetry of the parameters t and 1 − t, it is evident that the expression maxk maxi β̂ki (t)k
needs to be estimated only for k n/2. Fix k, for j < i < k, we have β̂kj (t) < β̂ki (t). Moreover, note
that β̂k,k−1 (t) is a monotonically decreasing function on [tk , tk+1 ]. Hence if let m = n/2, we have
m
max max β̂ki (t) = max β̂m,m−1
, max β̂mm (t) .
k
i
n t∈[ mn , m+1
n ]
8
R.-J. Zhang, G.-J. Wang / Computer Aided Geometric Design 23 (2006) 1–16
Next, by Lemma A.4 in Appendix A, it follows that
m
max β̂mm (t) = β̂mm
, n 9.
m m+1
n
t∈[ n , n ]
Also a direct calculation shows that the above identity still holds for 4 n 8. It is easy to obtain that
(n − m)m n m
1
m
=
Bm
− = M1 (n).
β̂mm
n
n
n
4
So we just need to prove
m
m
β̂m,m−1
.
β̂mm
n
n
In fact, it is easy to get
m−1
m
(n − m)m n−1 m
m
=
Bm−1
−
.
Bjn
β̂mm−1
n
n
n
n
j =0
n−1 m
( n ), we then obtain that
Noticing Bmn ( mn ) = Bm−1
m−1
m 1
m
m
β̂mm
− β̂m,m−1
=
− 0.
Bjn
n
n
n
4
j =0
The last inequality can be proved by a similar approach used in Lemma A.4 in Appendix A.
(2) k = 0. In this case, by the method used in the proof of Lemma A.3 it can be obtained that
1 n 1
β̂01 (t)
(n 4)
= 1−
−
[0,1/n]
n
4
and that
2
1
1
max β̂0i (t) [0,1/n] = β̂02 (t) [0,1/n] = β̂02
=
(2 − j )α̂0j
2in−1
n
4
j =0
1 n
1 n−1
=2 1−
+ 1−
− 1,
n
n
then
1 n
3
1 n−1
β̂01 (t)
− max β̂0i (t) [0,1/n] = − 1 −
− 1−
.
[0,1/n]
2in−1
4
n
n
Also it can be proved that the function (1 − n1 )n + (1 − n1 )n−1 decreases with n ( 4), then that
1 n
1 4
1 n−1 3
1 3
3
− 1−
− 1−
> − 1−
− 1−
≈ 0.012 > 0.
4
n
n
4
4
4
So
1 n 1
− .
max β̂0i (t) [0,1/n] = 1 −
1in−1
n
4
R.-J. Zhang, G.-J. Wang / Computer Aided Geometric Design 23 (2006) 1–16
9
On the other hand, since
1 4 1
1 n 1
− < 1−
− ≈ 0.066 (n 4),
1−
n
4
4
4
the following inequality
1 n 1
− < M1 (n)
1−
n
4
holds for n 4. Thus
max β̂0i (t)[0,1/n] < M1 (n).
1in−1
Combining case (1) and case (2), we complete the proof.
2
Corollary 2. The bound shown in Theorem 2 is sharp for all degrees.
Proof.
By a similar process in the proof of Theorem 2, it is easy to see that the equality in Theorem 2 holds for the Bézier polynomial with 2 bi = 0 for all i except for i = n/2. Thus the proof is
completed. 2
3. Another combination
Write
n
k
n k
=
,
bi Bi
p
n
n
i=0
k = 0, 1, . . . , n.
Apparently, p(k/n) is a linear combination of the coefficients bi , i = 0, 1, . . . , n. For example,
b0 + 2b1 + b2
1
, p(1) = b0 ,
, b2 , n = 2;
p(0), p
2
4
2
1
,p
, p(1)
p(0), p
3
3
8b0 + 12b1 + 6b2 + b3 b0 + 6b1 + 12b2 + 8b3
,
, b3 , n = 3.
= b0 ,
27
27
¯ inter¯ connecting the points (tk , p(k/n)), k = 0, 1, . . . , n. Obviously l(t)
We denote a broken line as l(t)
polates p(t) at the nodes tk .
Theorem 3. The distance from the univariate, scalar-valued polynomial p(t) of degree n to its interpo¯ is bounded as
lated polygon l(t)
n−1
p(t) − l(t)
¯ 2 b∞ , n 2.
∞,[0,1]
8n
10
R.-J. Zhang, G.-J. Wang / Computer Aided Geometric Design 23 (2006) 1–16
Fig. 4. A cubic Bézier polynomial and its control polygon with Bézier ordinates sequence (b0 , b1 , b2 , b3 ) = (0, 1, 1, 0) and
corresponding 2 b∞ = 1. The bound is taken on at t = 1/3, where p(1/3) − l(1/3) = 1/3 = N∞ (3)2 b∞ . Its
quasi-control polygon with Bézier ordinates sequence (c0 , c1 , c2 , c3 ) = (0, 3/4, 3/4, 0). The bound is taken on at t = 1/3,
ˆ
where p(1/3) − l(1/3)
= 1/12 = M∞ (2)2 b∞ . A broken line polygon with nodes sequence (p(0), p(1/3), p(2/3),
¯
p(1)) = (0, 8/3, 8/3, 0), the bound is taken on at t = 1/2, where p(1/2) − l(1/2)
= 1/12 = M∞ (2)2 b∞ .
Proof. On the interval (tk , tk+1 ),
¯l[tk ,tk+1 ] (t) := p k ti+1 − t + p k + 1 t − tk .
n ti+1 − tk
n
ti+1 − ti
¯ interpolates two endpoints of the polynomial p(t), (tk , p(tk )) and (tk+1 , p(tk+1 )). ApApparently, l(t)
plying a well-known inequality (for example, see (Filip et al., 1986)), we have
p(t) − l(t)
¯ [tk ,tk+1 ]
1 p (t).
2
8n
Combining with the following inequality
p (t) n(n − 1)2 b∞ ,
we finish the proof.
2
¯ mentioned in Theorem 3 is the same as the broken line l(t)
ˆ applied in
Since the broken line l(t)
Theorem 1 in the case for n = 2, the proof of Theorem 1 in this case can be derived by Theorem 3. Also
ˆ of n = 3 in Theorem 1 and the broken line l(t)
¯ in Theorem 3 are
it is interesting that the broken line l(t)
different, but both bounds are equal (see Fig. 4).
Although the bound shown in Theorem 3 is better than the other two in Theorems 1 and 2, the former
costs too many time for calculating p(k/n) when the degree n is larger. Thus, a question is proposed
naturally: Whether or not there exists another broken line with simpler form and better approximation
bound to approximate a Bézier–Bernstein polynomial except for what this paper introduced? In other
words, finding a broken line with less calculation and higher precision is a valuable question.
R.-J. Zhang, G.-J. Wang / Computer Aided Geometric Design 23 (2006) 1–16
11
Acknowledgements
We would like to thank the referees for their valuable comments and suggestions. This work
is supported jointly by the National Grand Fundamental Research 973 Program of China (Grant
No. 2004CB719400), the National Natural Science Foundation of China (Grant No. 60373033 and
No. 60333010) and the National Natural Science Foundation for Innovative Research Groups (Grant
No. 60021201).
Appendix A
Lemma A.1. Given some functions αi (t); i = 1, 2, . . . , n − 1. Then there exists a unique group function
of βi (t) such that
n
αi (t)bi =
n−1
i=0
βi (t)2 bi
(A.1)
i=1
if and only if
n
αi (t) = 0,
n
i=0
iαi (t) = 0.
i=0
Proof. Abbreviating βi (t) = βi , αi (t) = αi , we see that expression (A.1) is equivalent to the following
system of linear equations with variables βi :
β1 = α0 ,
−2β1 + β2 = α1 ,
β1 − 2β2 + β3 = α2 ,
β2 − 2β3 + β4 = α3 ,
···
β
n−3 − 2βn−2 + βn−1 = αn−2 ,
−2βn−1 + βn−2 = αn−1 ,
βn−1 = αn .
The above equations have a unique group of solution if and only if
n
n
αi = 0,
iαi = 0,
i=0
i=0
which can be derived by the following expressions
1
0
0 ··· 0 0
0
α0
−2 1
0 ··· 0 0
0
α1
1 −2 1 · · · 0 0
0
α2
0
1 −2 · · · 0 0
0
α3
.
..
..
.
..
..
..
..
.
.
· · · ..
.
.
.
0
0
0
·
·
·
1
−2
1
α
n−2
0
0
0 · · · 0 1 −2 α
0
0
0
···
n−1
0
0
1
αn
12
R.-J. Zhang, G.-J. Wang / Computer Aided Geometric Design 23 (2006) 1–16
1
0
0 ···
0 ···
−2 1
1 −2 1 · · ·
1 −2 · · ·
0
∼
..
..
...
.
.
···
0
0
0
···
0
0
0 ···
0
0
0 ···
0
0
0
0
..
.
1
0
0
0
0
0
0
..
.
0
0
0
0
..
.
α0
α1
α2
α3
..
.
.
−2 1 αn−2
n
0 0
iαi
i=0
n
0 0
i=0 αi
2
Lemma A.2. When n = 3 and k = 0, the following equality holds:
P (t) − l(t) 1 2 b∞ (t ∈ [0, 1/3]).
12
Proof. A direct calculation shows that
P (t) − l(t) = β̂01 (t)2 b1 + β̂02 (t)2 b2 ,
where β̂01 (t) = −t 3 + 3t 2 − 34 t, β̂02 (t) = t 3 . Then
β̂01 (t) + β̂02 (t) = 3t t − 1 1 , t ∈ [0, 1/3],
4 12
and
β̂01 (t) − β̂02 (t) = 2t 3 − 3t 2 + 3 t < 0.052 < 1 ,
4 12
t ∈ [0, 1/3].
Thus
P (t) − l(t) max β̂01 (t) + β̂02 (t), β̂01 (t) − β̂02 (t) 2 b∞ 1 2 b∞ .
12
2
Lemma A.3. The expressions (3) are all nonnegative, i.e.,
k k+1
β̂ki (t) 0, t ∈
,
; k = 1, 2, . . . , n − 2; i = 1, 2, . . . , n − 1.
n
n
Proof. When 1 i k − 1 or k + 2 i n − 2, the result is evident. When i = k + 1, note that Bjn (t)
(j k + 1) is a monotonically increasing function on [ nk , k+1
], so β̂kk+1 (t) > β̂ki (k/n) > 0. Thus, we
n
just need to prove β̂kk (t) 0. By symmetry of the parameters t and 1 − t, it suffices to show that for
k n/2. First we prove Lemma A.3 when n = 3, 4. Also, since the proofs of n = 3 and of n = 4 are
similar, we just show the proof of n = 4.
When k = 1,
1
1 1
4
β̂11 (t) = (1 − t) + t − , t ∈ , .
2
4 2
√
It is easy to know that t0 = 1 − 3 1/4 is the single extreme point of β̂11 (t), and also in this point β̂11 (t)
takes its minimum value, so β̂11 (t) β̂11 (t0 ) > 0.
When k = 2,
R.-J. Zhang, G.-J. Wang / Computer Aided Geometric Design 23 (2006) 1–16
β̂22 (t) = 2(1 − t)4 + 4(1 − t)3 t + t −
3
4
5
3
1
= (1 − t)4 + 2(1 − t)3 t − (1 − t)2 t 2 + t 4 ,
4
2
4
13
1 3
t∈ , .
2 4
Notice when t ∈ [ 12 , 34 ], we have
2
13
3
1
1
(1 − t)4 − (1 − t)2 t 2 + t 4 = t 2 − 3(1 − t)2 + (1 − t)4 0,
4
2
4
4
thus Lemma A.3 holds in this case.
When n 5, we distinguish two cases as follows:
1. k = 1. In this case, we have
1
1 2
n
β̂11 (t) := (1 − t)n + t − , t ∈
, .
4
2
n n
β̂22 (t) Differentiation of β̂11 (t) yields that
n
(t) = −n(1 − t)n−1 + .
β̂11
4
It is easy to know that in the point t0 = 1 − (1/4)1/(n−1) the function β̂11 (t) takes its minimum value on
the interval [ n1 , n2 ] (t ∈ [ n1 , n2 ]). Thus
n
n−1
n
1
1
β̂11 (t) β̂11 (t0 ) := + (1 − n)
− .
4
4
2
In order to prove β̂11 (t0 ) > 0, it suffices to show that
n
n−1
1
1n−2
4n−1
4
or
1
n−1
1
1
.
1−
n−1
4
Let
x
1
1
, 0<x .
f (x) := 1 − x −
4
4
Differentiation of f (x) yields that
x
1
ln 4.
f (x) = −1 +
4
Hence it is easy to know that when x = x0 = lnlnln44 0.2356, f (x) takes its maximum value. Since
f ( 14 ) > 0 and f (0+) = 0 we know Lemma A.3 holds in this case.
2. 2 k n − 2. In this case we have
k
k+1
k k+1
n
, t∈
,
(k − j )Bkj (t) + t −
.
β̂kk (t) =
4
4
n
n
j =0
14
R.-J. Zhang, G.-J. Wang / Computer Aided Geometric Design 23 (2006) 1–16
By linear precision, we have
β̂kk (t) =
k−1 n
k+1
1 1
1
Bjn (t) +
k−j +
j−
(j − k − 1)Bjn (t) − Bkn (t)
4
n
4
4
j =0
j =k+2
1
5 n
1 n
(t) − Bkn (t) + Bk−2
(t)
Bk+2
4
4
4
n
n
1
1 n
5
n−k−2 k+2
n k
(1 − t)
(1 − t) t +
(1 − t)n−k+2 t k−2
=
t
−
4 k+2
4 k
4 k−2
1
n
n
n
= (1 − t)n−k−2 t k−2
(1 − t)2 t 2 + 5
(1 − t)4 .
t4 −
4
k
k−2
k+2
According to the above expression, we know that to prove the inequality β̂kk (t) 0, it suffices to show
that
2
n
n
n
− 20
0, n 5.
k+2 k−2
k
This is equivalent to the expression
(k + 1)(k + 2)(n − k + 1)(n − k + 2)
20,
(k − 1)(k)(n − k − 1)(n − k)
n 5.
But by the following obvious inequalities,
k+1
3,
k−1
k+2
2,
k
n−k+1 4
,
n−k−1 2
n−k+2 5
,
n−k
3
2 k n − 2, n 5,
we can see that the above expression holds. Thus Lemma A.3 in this case is proved.
2
] for n 9.
Lemma A.4. Let m = n/2, then the function β̂mm (t) is a decreasing function on t ∈ [ mn , m+1
n
Proof. Differentiation of β̂mm (t) yields that
m−1
1
.
(t) = −n
Bin−1 (t) −
β̂mm
4
i=0
], to prove β̂mm
(t) < 0, we just need show that
Since Bin−1 (t) is a decreasing function on [ mn , m+1
n
m−1
i=0
Bin−1
1
m+1
> .
n
4
By induction, a direct calculation shows that Lemma A.4 holds when n = 9, 10. Suppose that it holds
when n = 2l (l 2), that is,
l−1
1
2l−1 l + 1
Bi
> .
2l
4
i=0
R.-J. Zhang, G.-J. Wang / Computer Aided Geometric Design 23 (2006) 1–16
To prove the inequalities
l
l+2
1
2l
Bi
> ,
2l + 1
4
i=0
l
Bi2l+1
i=0
15
l+2
1
>
2l + 2
4
hold for n = 2l + 1 and n = 2l + 2, we just need to show that the last inequality holds. Since
l
l−1
l+2
2l+1
2l−1 l + 1
−
Bi
Bi
2l + 2
2l
i=0
i=0
l−1 l+2
l+2
l+1
2l+1
= B02l+1
+
− Bi2l−1
,
Bi+1
2l + 2
2l
+
2
2l
i=0
we just need to show that
l+2
2l+1
2l−1 l + 1
− Bi
> 0.
Bi+1
2l + 2
2l
But the above expression is equivalent to
l
l+2
l − 1 2l−i−1 (l + 1)2 i
(2l + 1)(2l)
>
(2l − i)(i + 1) 2l + 2 2l + 2
l
l(l + 2)
2l−2i−1 3
i
l−1
l + l2 − l − 1
=
.
l
l 3 + 2l 2
So this can be derived from the following inequalities (0 i l − 1)
(2l + 1)(2l) l
l−1
(2l + 1)(2l)
l
l+2
l+2
>
>
(2l − i)(i + 1) 2l + 2 2l + 2
(l + 1)l 2l + 2 2l + 2
l
and
l − 1 2l−2i−1 l 3 + l 2 − l − 1 i
l−1
>
.
l
l
l 3 + 2l 2
This completes the proof.
2
References
Filip, D., Magedson, R., Markot, R., 1986. Surface algorithm using bounds on derivatives. Computer Aided Geometric Design 3
(4), 295–311.
Lane, J.M., Riesenfeld, R.F., 1980. A theoretical development for the computer generation and display of piecewise polynomial
surface. IEEE Trans. Pattern Anal. Machine Intell. 2, 35–46.
Lutterkort, D., Peters, J., 2001. Optimized refinabled enclosures of multivariate polynomial pieces. Computer Aided Geometric
Design 18 (9), 851–863.
Nairn, D., Peters, J., Lutterkort, D., 1999. Sharp, quantitative bounds on the distance between a polynomial piece and its Bézier
control polygon. Computer Aided Geometric Design 16 (7), 613–631.
Reif, U., 2000. Best bounds on the approximation of polynomials and splines by their control structure. Computer Aided
Geometric Design 17 (6), 579–589.
16
R.-J. Zhang, G.-J. Wang / Computer Aided Geometric Design 23 (2006) 1–16
Wang, G.J., Xu, W., 1991. The termination criterion for subdivision of the rational Bézier curves. Graph. Models Image
Process. 53 (1), 93–96.
Zhang, R.J., Wang, G.J., 2003. The improvement of the termination criterion for subdivision of the rational Bézier curves.
J. Zhejiang University Science 4 (1), 47–52.