UNIVERSITY OF DUBLIN TRINITY COLLEGE
advertisement

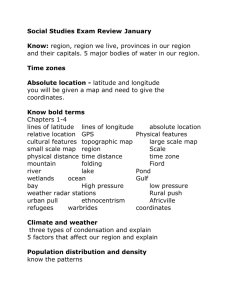
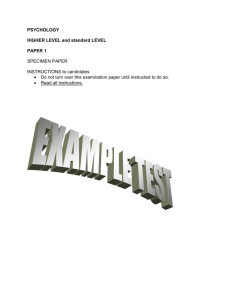
UNIVERSITY OF DUBLIN XMA1132 TRINITY COLLEGE Faculty of Engineering, Mathematics and Science school of mathematics JF Mathematics JF Theoretical Physics JF TSM Mathematics Hilary Term 2015 Module MA1132, ???, ??? Final Exam ??? 9.30 — 11.30 Dr. Sergey Frolov ATTEMPT FOUR QUESTIONS Log tables are available from the invigilators, if required. Non-programmable calculators are permitted for this examination,—please indicate the make and model of your calculator on each answer book used. Page 2 of 10 XMA1132 Each question is worth 20 marks. Show the details of your work. 1. The equations of motion of a system of n particles are given by mi ẍi = − ∂U (x1 , . . . , xn ) , ∂xi ẍi = d 2 xi , dt2 i = 1, 2, . . . , n , where mi is the mass and xi is the coordinate of the i-th particle, and U (x1 , . . . , xn ) is the potential energy of the system. Consider a system of n coupled anharmonic oscillators with the potential U (x1 , . . . , xn ) = n−1 X κ i=1 2 (xi+1 − xi )2 + n X λ i=1 4 x4i . (a) 3 marks. Find the equations of motion of the first particle (x1 ). (b) 3 marks. Find the equations of motion of the second particle (x2 ). (c) 3 marks. Find the equations of motion of the last particle (xn ). (d) 8 marks. Find the equations of motion of the i-th particle (xi ) for 1 < i < n. (e) 3 marks. Write the equations of motion of the i-th particle (xi ) for 1 ≤ i ≤ n by using the Kronecker delta δij . Solution : (a) We have for x1 n−1 n X X ∂U (x1 , . . . , xn ) κ ∂ λ 4 m1 ẍ1 = − =− (xj+1 − xj )2 + xj ∂x1 ∂x1 j=1 2 4 j=1 ∂ κ λ =− (x2 − x1 )2 + x41 = −κ(x1 − x2 ) − λx31 . ∂x1 2 4 ! (1) (b) We have for x2 n−1 n X X ∂U (x1 , . . . , xn ) κ ∂ λ 4 2 m2 ẍ2 = − =− (xj+1 − xj ) + x ∂x2 ∂x2 j=1 2 4 j j=1 ∂ κ κ λ 4 2 2 =− (x2 − x1 ) + (x3 − x2 ) + x2 ∂x2 2 2 4 = −κ(2x2 − x1 − x3 ) − λx32 . ! (2) Page 3 of 10 XMA1132 (c) We have for xn ! n−1 n X X ∂ κ λ ∂U (x1 , . . . , xn ) =− (xj+1 − xj )2 + x4j mn ẍn = − ∂xn ∂xn j=1 2 4 j=1 ∂ κ λ =− (xn − xn−1 )2 + x4n = −κ(xn − xn−1 ) − λx3n . ∂xn 2 4 (3) (d) We have for xi , 1 < i < n n−1 n X X ∂U (x1 , . . . , xn ) ∂ κ λ 4 2 mi ẍi = − =− (xj+1 − xj ) + xj ∂xi ∂xi j=1 2 4 j=1 ∂ κ κ λ =− (xi − xi−1 )2 + (xi+1 − xi )2 + x4i ∂xi 2 2 4 ! (4) = −κ(2xi − xi−1 − xi+1 ) − λx3i . (e) We have for xi , 1 ≤ i ≤ n mi ẍi = −κ(2xi − xi−1 − xi+1 ) + κx1 δi1 + κxn δin − λx3i , (5) where δij is Kronecker’s delta δij = 1 if i = j, δij = 0 if i 6= j, and x0 = xn+1 = 0. 2. Consider the surface z = f (x, y) = ln 1 2/3 p 3 12 sin(x − 2y) + 8y 2 − x3 − 6x2 y + 32 e 2 . (a) 9 marks. Find an equation for the tangent plane to the surface at the point P = (2, 1, z0 ) where z0 = f (2, 1). (b) 3 marks. Find points of intersection of the tangent plane with the x-, y- and z-axes. (c) 2 marks. Sketch the tangent plane, and show the point P = (2, 1, z0 ) on it. (d) 4 marks. Find parametric equations for the normal line to the surface at the point P = (2, 1, z0 ). (e) 2 marks. Sketch the normal line to the surface at the point P = (2, 1, z0 ). Page 4 of 10 XMA1132 Solution: (a) We first find 12 sin(x − 2y) + 8y 2 − x3 − 6x2 y + 32|P = 8 , z0 = 2 , 3 and then simplify 1 2/3 p 3 z = ln e 12 sin(x − 2y) + 8y 2 − x3 − 6x2 y + 32 2 1 2 = ln(12 sin(x − 2y) + 8y 2 − x3 − 6x2 y + 32) + − ln 2 . 3 3 Then, we compute the partial derivatives at P ∂ −3x2 − 12xy + 12 cos(x − 2y) z|x=2,y=1 = = −1 . 3 2 2 ∂x 3 (−x − 6x y + 12 sin(x − 2y) + 8y + 32) P ∂ 1 −6x2 − 24 cos(x − 2y) + 16y 4 z|x=2,y=1 = = − . ∂y 2 3 (−x3 − 6x2 y + 12 sin(x − 2y) + 8y 2 + 32) P 3 The tangent plane equation is given by z= 4 4 2 − 1(x − 2) − (y − 1) = 4 − x − y . 3 3 3 (b) (4, 0, 0), (0, 3, 0) , (0, 0, 4) (c) The tangent plane is the one through the points in (b). (d) The normal line to the surface (and the tangent plane) is given by 2 4 r = 2i + j + k + t i + j + k . 3 3 (e) The normal line is perpendicular to the plane. 3. Consider the intersection of the surfaces z = λ x + µ y + h , λ > 0 , µ > 0 , h > 0 , and (a) 1 mark. What is the surface z = λ x + µ y + h ? (b) 1 mark. What is the surface x2 a2 + y2 b2 =1? x2 y2 + 2 = 1. a2 b (6) Page 5 of 10 XMA1132 (c) 2 mark. Sketch the surfaces for a = b = λ = µ = h = 1. (d) 12 mark. Find the coordinates of the point on the intersection which has the maximum z-coordinate. (e) 4 mark. Find the coordinates of the point on the intersection which has the minimum z-coordinate. Solution : (a) It is a plane. (b) It is an elliptic cylinder. (c) (d) To find zmin we use the Lagrange multiplier method, and get the equations λ = 2Λ x , a2 µ = 2Λ y , b2 x2 y 2 + 2 = 1. a2 b (7) Multiplying the first equation by x, the second equation by y and summing up the resulting equations, one gets (8) λx + µy = 2Λ . Thus, one derives the equations for x and y λ = (λx + µy) or by using the constraint x2 a2 + y2 b2 x , a2 µ = (λx + µy) y , b2 (9) =1 y2 µ = xy , b2 λa2 x2 λ = xy . a2 µb2 (10) Page 6 of 10 XMA1132 Summing up these equations one finds xy = λµa2 b2 , λ 2 a2 + µ 2 b 2 x2 = λ2 a4 , λ 2 a2 + µ 2 b 2 y2 = µ 2 b4 . λ 2 a2 + µ 2 b 2 (11) Thus there are two solutions λa2 , xmin = − p λ 2 a2 + µ 2 b 2 λa2 xmax = + p , λ 2 a2 + µ 2 b 2 µb2 ymin = − p ymax , λ2 a2 + µ2 b2 µb2 = +p , λ 2 a2 + µ 2 b 2 (12) corresponding to the lowest and highest points on the intersection, respectively. The z-coordinates of these points are zmin = h − p λ 2 a2 + µ 2 b 2 , zmax = h + p λ 2 a2 + µ 2 b 2 . (13) Thus, the coordinates of the point on the intersection which has the maximum zcoordinate are µb2 ymax = + p , λ 2 a2 + µ 2 b 2 λa2 , xmax = + p λ 2 a2 + µ 2 b 2 zmax = h + p λ2 a2 + µ2 b2 . (14) (e) The coordinates of the point on the intersection which has the minimum z-coordinate are xmin = − p λa2 λ2 a2 + µ2 b2 µb2 ymin = − p , λ2 a2 + µ2 b2 , zmin = h − p λ2 a2 + µ2 b2 . (15) 4. Consider the integral √ Z 3 −5 Z 2+ 15−2y−y 2 f (x, y)dxdy . √ 2− 15−2y−y 2 (a) 6 marks. Determine and sketch the integration region R. (b) 3 marks. Reverse the order of integration. (c) 11 marks. Compute the integral if f (x, y) = x y . Page 7 of 10 XMA1132 6 4 2 0 -2 -6 -4 -2 0 Solution: (a) The region R is shown above It is found by noting that 2− p p 15 − 2y − y 2 ≤ x ≤ 2 + 15 − 2y − y 2 =⇒ (x − 2)2 ≤ 15 − 2y − y 2 (16) 2 2 =⇒ (x − 2) + (y + 1) ≤ 16 . Thus it is a disc of radius 4 centred at (2, −1). (b) Reversing the order of integration one gets Z 6Z Z 3 Z 2+√15−2y−y2 f (x, y)dxdy = √ −5 2− 15−2y−y 2 −2 √ −1+ 12+4x−x2 √ −1− 12+4x−x2 f (x, y)dydx . (17) (c) Since R is a disc it is convenient to use the polar coordinates with the pole at the centre of the disc. Then x = 2 + r cos θ , and Z 3Z √ 2+ y = −1 + r sin θ , 15−2y−y 2 ZZ f (x, y)dxdy = 0 ≤ r ≤ 4 , 0 ≤ θ ≤ 2π , Z 2π Z (18) 4 (2 + r cos θ)(−1 + r sin θ)rdrdθ √ 15−2y−y 2 R 0 0 Z 2π Z 4 = (−2 − r cos θ + 2r sin θ + r2 sin θ cos θ)rdrdθ = −32π . −5 xydxdy = 2− 0 0 (19) 5. (a) 1 mark. Express rectangular coordinates in terms of cylindrical coordinates, and draw the corresponding picture. (b) Consider the solid G bounded above by the surface x2 + y 2 + 2z = 15 and below p by the surface z = x2 + y 2 . Page 8 of 10 XMA1132 i. 1 mark. What is the surface x2 + y 2 + 2z = 15 ? p ii. 1 mark. What is the surface z = x2 + y 2 ? iii. 2 marks. Sketch the solid G, and its projection onto the xy-plane. iv. 5 marks. Use triple integral and cylindrical coordinates to compute the volume V of the solid G. v. 7 marks. Use triple integral and cylindrical coordinates to find the mass M of the solid G if its density is δ(x, y, z) = √ 1−e − x2 + y 2 + 5 x2 +y 2 p . x2 + y 2 vi. 3 marks. What is the density of the solid G at the origin: δ(0, 0, 0) = ? Solution: (a) x = r cos θ , y = r sin θ , z = z, r ≥ 0 , 0 ≤ θ ≤ 2π (b)i. It is a paraboloid. (b)ii. It is a cone. (b)iii. The solid and its projection R onto the xy-plane are shown below 3 2 1 0 -1 -2 -3 -3 -2 -1 0 1 2 3 The projection is a disc of radius 3 as can be seen by solving the equation p p p x2 + y 2 + 2 x2 + y 2 = 15 =⇒ (1 + x2 + y 2 )2 = 16 =⇒ x2 + y 2 = 3 . (b)iv. The volume is ZZZ Z V = dV = G 0 2π Z 3 Z 15/2−r2 /2 Z dzrdrdθ = 2π 0 r 135 81 117π = 2π( − − 9) = ≈ 91.8916 . 4 8 4 3 ( 0 15 r2 − − r)rdr 2 2 (20) Page 9 of 10 XMA1132 (b)v. The mass is 2π 3 15/2−r2 /2 1 − e−r M= δ(x, y, z)dV = dzrdrdθ r2 + 5r G 0 0 r Z 3 Z 3 Z 3 1 − e−r 15 r2 1 − e−r (1 − e−r )(3 − r)dr = 2π ( − − r)dr = π (5 + r)(3 − r)dr = π r+5 2 2 r+5 0 0 0 Z 3 Z 3 Z 3 9 9 u−3 u−3 3 u−3 (1 − e )udu = π − π e udu = π − π(e u|0 − eu−3 du) =π 2 2 0 0 0 9 5 1 u−3 3 = π − π(3 − e |0 ) = π( − 3 ) ≈ 7.69757 . 2 2 e (21) ZZZ Z Z Z (b)vi. The density of the solid G at the origin is 1 1 − e−t = . δ(0, 0, 0) = lim 2 t→0 t + 5t 5 (22) Page 10 of 10 XMA1132 Useful Formulae 1. Let r(t) be a vector function with values in R3 : (a) The unit normal vector is N(t) = dT dt dT | dt | r(t) = x(t) i + y(t) j + z(t) k . . (b) The unit binormal vector is B(t) = T(t) × N(t) . (c) The curvature of C is κ(t) = |T0 (t)| . |r0 (t)| 2. Let σ be a surface in R3 : z = f (x, y) (a) The slope kx of the surface in the x-direction at (x0 , y0 ) is kx = ∂z (x0 , y0 ) . ∂x (b) The slope ky of the surface in the y-direction at (x0 , y0 ) is ky = ∂z (x0 , y0 ) . ∂y (c) The equation for the tangent plane to the surface at the point P = (x0 , y0 , z0 ) is z = z0 + kx (x − x0 ) + ky (y − y0 ) . (d) Parametric equations for the normal line to the surface at P = (x0 , y0 , z0 ) are r(t) = r0 + t(−kx i − ky j + k) , r0 = x0 i + y0 j + z0 k . (e) The mass of the lamina with the density δ(x, y, z) that is the portion of the surface that is above a region R in the xy-planeris RR RR M = σ δ(x, y, z) dS = R δ(x, y, z) 1 + ∂z 2 ∂x + 2 ∂z ∂y dA . 3. Let R be a plain lamina with density δ(x, y). (a) Its mass is equal to M = RR R δ(x, y) dA . (b) The x-coordinate of its centre of gravity is equal to xcg = 1 M RR (c) The y-coordinate of its centre of gravity is equal to ycg = 1 M RR R x δ(x, y) dA . R y δ(x, y) dA . 4. The volume element in spherical coordinates is dV = r2 sin φ dr dφ dθ . 5. Let a region Rxy in the xy-plane be mapped to a region Ruv in the uv-plane under the change of variables u = u(x, y) , v = v(x, y). ∂u ∂v ∂u ∂v (a) The magnitude of the Jacobian of the change is ∂(u,v) = − . ∂(x,y) ∂x ∂y ∂y ∂x −1 RR RR (b) The integral over Rxy is Rxy f (x, y) dAxy = Ruv f (x(u, v), y(u, v)) ∂(u,v) dAuv . ∂(x,y) c UNIVERSITY OF DUBLIN 2015