Document 10414704
advertisement

IEEE TRANSACTIONS ON COMPUTER-AIDED DESIGN OF INTEGRATED CIRCUITS AND SYSTEMS, VOL. 29, NO. 6, JUNE 2010
977
Diagnosis of Integrated Circuits With Multiple
Defects of Arbitrary Characteristics
Xiaochun Yu, Student Member, IEEE, and Ronald DeShawn Blanton, Fellow, IEEE
Abstract—This paper describes a multiple-defect diagnosis
methodology that is flexible in handling various defect behaviors
and arbitrary failing pattern characteristics. Unlike some other
approaches, the search space of the diagnosis method does not
grow exponentially with the number of defects. Results from
extensive simulation experiments and real failing integrated
circuits show that this method can effectively diagnose circuits
that are affected by a large (>20) or small number of defects
of various types. Moreover, this method is capable of accurately
estimating the number of defective sites in the failing circuit.
Index Terms—Candidate isolation, failure diagnosis, integrated
circuit testing, multiple-defect, physical failure analysis.
I. Introduction
D
IAGNOSIS is the process of finding the locations and
nature of defects within a failing circuit by analyzing/comparing the observed circuit response and the intended
functionality of the circuit. It is a critical step for understanding the failure mechanisms that can adversely affect
circuit yield and quality. A circuit affected by a single line
permanently fixed at some logic value can be effectively
diagnosed using stuck-at fault dictionaries [1]. However, due
to increasing device and interconnect density, coupled with
more pronounced variability, some failing chips are affected
by multiple-defects. (We define a multiple-defect as a set
of faulty sites, where each faulty site si is affected by a
different defect. For example, a two-line bridge defect is
not a multiple-defect, but two physically-separated powersupply bridges does constitute one under this definition.) For
example, in our analysis of over 7000 failing chips from LSI
Corporation, we found that 23% of them exhibited behavior
that indicated the existence of multiple-defects. Moreover, it is
likely the case that the sheer number of defective sites can be
significant [2]. However, existing fault models cannot capture
all possible defect behaviors. Therefore, diagnosis of multipledefects is an important, yet challenging task.
There have been many explorations in this area. One approach is to develop new automatic test pattern generation
Manuscript received June 22, 2009; revised October 29, 2009. Date of current version May 21, 2010. This work was supported by the National Science
Foundation, under Award No. CCF-0427382. This paper was recommended
by Associate Editor S. Hellebrand.
The authors are with the Department of Electrical and Computer Engineering, Carnegie Mellon University, Pittsburgh, PA 15213 USA (e-mail:
xyu1@ece.cmu.edu; blanton@ece.cmu.edu).
Color versions of one or more of the figures in this paper are available
online at http://ieeexplore.ieee.org.
Digital Object Identifier 10.1109/TCAD.2010.2048352
approaches for enhancing the accuracy of diagnosis [3], [4].
Generating new patterns for diagnosis may not be economically viable in practice however. Typically, diagnosis uses
the production test patterns for defect detection. Diagnosis
methodologies for multiple-defects assumed to behave as a
collection of stuck-at faults have been described in [5]–[7].
A method for diagnosing defects that are either bounded or
region based were described in [8]. In [9], the author proposed
a diagnosis method for multiple bridge defects using IDDQ
information. A common shortcoming of the aforementioned
approaches is that they are all limited to the types of misbehaviors assumed. Alternatively, other work performs diagnosis
based on the idea of single-location-at-a-time (SLAT) test
patterns [2], [10]. [A SLAT pattern [2] is a test pattern that:
1) fails on the tester for the considered circuit under test; and
2) produces a circuit response that exactly matches the fault
simulation response of some stuck-at fault.] Such methods fail
when no SLAT patterns exist, or when the SLAT patterns are
actually created by multiple, simultaneously-active defects.
We have developed a multiple-defect diagnosis methodology that easily copes with failing patterns of arbitrary
characteristics (SLAT, SO-SLAT [3], non-SLAT, etc.), while
making no assumptions concerning the particular defect behavior. This method can even effectively diagnose circuits that
have a significant number (>20) of defects. The methodology
is composed of a defect site identification and elimination
(DSIE) procedure [11], and a candidate1 selection and ranking
heuristic. The search space of this diagnosis method does
not grow exponentially with the number of defects in the
circuit under diagnosis (CUD), since combinations of defect
sites are not explicitly considered. Another outcome of our
diagnosis is an estimate of the number of defective sites.
Simulation experiments show a strong correlation between the
number of defective sites estimated and the actual number of
defective sites in the CUD. This paper subsumes and extends
our previous work [11], [12] in that: 1) it proposes a forest
structure to organize the diagnosis candidates according to
their effect on the failing circuit, which can be used to effectively guide diagnosis; and 2) our candidate selection process
now encompasses the entire forest, instead of only the root
nodes in the forest, which leads to improved diagnosis results.
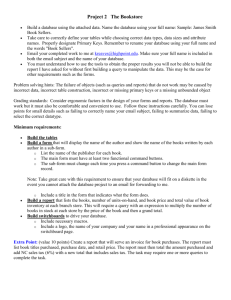
An overview of our diagnosis methodology is given in
Fig. 1. First, defect candidates are identified through a
1 If a signal line s potentially behaves as stuck-at-v for failing pattern t ,
i
k
i
where vi is the expected or correct value driven onto the line by tk when the
CUD is defect free, then si /vi is referred to as a candidate.
c 2010 IEEE
0278-0070/$26.00 © 2010 IEEE. Personal use of this material is permitted. Permission from IEEE must be obtained for all other uses, in any current or future media,
including reprinting/republishing this material for advertising or promotional purposes, creating new collective works, for resale or redistribution
to servers or lists, or reuse of any copyrighted component of this work in other works.
978
IEEE TRANSACTIONS ON COMPUTER-AIDED DESIGN OF INTEGRATED CIRCUITS AND SYSTEMS, VOL. 29, NO. 6, JUNE 2010
Algorithm 1 DSIE Algorithm
Fig. 1.
Overview of the multiple-defect diagnosis methodology.
defect site identification and elimination procedure (Section
II), which consists of a path-tracing procedure [13] and a site
elimination approach for conservatively eliminating some of
the candidates implicated by path-tracing. Then, the effect of
those candidates are analyzed and organized in a candidate
forest (Section III). Analysis of the candidate forest leads to
the selection of a near minimal group of candidates that jointly
produce the failing responses. The selected candidates are then
ranked and reported as the final output of diagnosis (Section
IV).
II. Defect Site Identification Elimination
In this section, we describe the method for conservatively
identifying potential defect sites using path-tracing [13] followed by a novel approach for conservatively eliminating some
of these sites. These two steps are referred to as DSIE. A highlevel description of DSIE is given in Algorithm 1.
The example CUD of Fig. 2 is used to illustrate DSIE.
An OR-type bridge defect involving signal lines j and k, and
a defect that causes signal h to be stuck-at-1 are assumed
to exist in the CUD. Also assume there are only two failing
test patterns, namely, t1 (abcdefg) = 0010001 [Fig. 2(a)] and
t2 (abcdefg) = 0001010 [Fig. 2(b)]. In Fig. 2, the output values
without (within) boxes are produced by the fault-free (faulty)
CUD for the two failing patterns.
For a given failing test pattern tk , the path-tracing procedure
[13] traces back through the circuit from every failing observable point (scanned memory element or primary output). An
observable point is failing if its observed response is different
from its response when the CUD is defect free. Otherwise,
the observable point is said to be passing. Lines encountered
during the trace are implicated as potential defect sites.2 Pathtracing processes internal lines encountered while tracing back
through the CUD in the following manner. When a gate output
is reached and all gate inputs have noncontrolling values
2 We will use the term “site” to refer to a signal line that is stuck-at value
v ∈ {0, 1} for some test pattern tk .
for each failing test pattern tk do
Path-trace to identify potential defect sites (Dk ) implicated by tk
end for
D = union of all Dk s
while first iteration or at least one site eliminated in last iteration do
for each failing test pattern tk do
Simulate tk
Inject the unknown value X at each potential defect site in D
Propagate all X values to the outputs
Assign fault-free logic values to all passing outputs
Queue = all lines with values changing from X to v ∈ {0, 1}
while Queue = ∅ do
si = line popped from Queue
Forward imply from si
FIi = lines with values X and implied to v ∈ {0, 1}
FAi = FIi − D
Lines in FAi are assigned to implied values
Queue = Queue ∪ FAi
if si ∈
/ D then
Backward imply from si
BIi = lines with values X and implied to v ∈ {0, 1}
Lines in BIi are assigned to implied values
Queue = Queue ∪ BIi
BPi = sites implicated by path-tracing only through BIi
Dk = Dk − BIi − BPi
D = union of all Dk s
end if
end while
end for
end while
applied, path-trace implicates all the gate inputs and continues
tracing from each input. If one or more inputs have controlling
values applied, only those inputs are implicated and the trace
continues only from those controlling inputs. If a fanout branch
is reached, it is implicated and tracing continues from the corresponding stem. In the example of Fig. 2, the set of potential
defect sites resulting from path-tracing the first failing pattern
include {m, i, a, b1 , b, h1 , h, c, n, h2 , j1 , e, f , j, j2 , p, q, j3 },
and the set of potential defect sites resulting from path-tracing
the second pattern are {m, n, q, r, i, h1 , h2 , k1 , k2 , l1 , a, b1 , b,
h, d1 , d, k, g, b3 , l, b2 }. We track the behavior of the potential
defect sites implicated, a modification first used in [14].
Path-tracing [13] is conservative in that it identifies defect
sites that can cause the failing outputs observed. However,
some sites may only impact outputs that never fail. In other
words, some sites may only prevent error propagation from
other sites to the outputs. Such sites cannot be found by
path-tracing. We do not deal with this shortcoming of pathtracing, but instead assume every defect site propagates an
error originating from itself to at least one failing output. This
assumption is reasonable since any defect site that does not
aid in establishing a failing output is very difficult to identify
without explicitly considering all lines within the CUD.
Path-tracing typically implicates many defect-free sites.
Given this reality, our goal is to eliminate defect-free sites
identified by path-tracing without removing any true defect
sites. If this can be accomplished, the eliminated sites do
not have to be further analyzed in the subsequent stages
of diagnosis, which alleviates the complexity of diagnosis
without degrading diagnosis accuracy.
Consider some site si implicated by path-tracing a failing
test pattern tk . We have observed cases where si will cause a
YU AND BLANTON: DIAGNOSIS OF INTEGRATED CIRCUITS WITH MULTIPLE DEFECTS OF ARBITRARY CHARACTERISTICS
979
a defective circuit. It is based on the fact that the logic value
of a defect-free line is a function of its upstream logic values,
while the value of a defective line is not. The following rules
are used to perform conservative implication.
A. Implication Rule
Consider a signal line si that has a value vi ∈ {0, 1} for
a failing pattern tk . If si is not a potential defect site for
any failing pattern (either by path-tracing or through earlier
elimination), both forward and backward implications are
performed from si . Otherwise, only forward implication is
performed from si .
B. Assignment Rule
Fig. 2. Fault-free signal values (no boxes) and observed responses (boxed
values) for an example CUD having two failing patterns: (a) t1 (abcdefg) =
0010001; and (b) t2 (abcdefg) = 0001010.
passing output to actually fail for tk no matter what other sites
implicated by path-tracing actually exist. For this situation, si
can be eliminated from the set of potential defect sites for tk ,
since its existence establishes an inconsistency not observed
in the test response. We use the following method to identify
and eliminate such sites.
For a failing pattern tk , we first determine the signal values
in the fault-free CUD. Then, we implicitly consider all possible
defect combinations by injecting the unknown logic value
X = {0, 1} at each potential defect site deduced from all
failing patterns. The X values are propagated to observable
points to represent the circuit state under all possible defect
combinations. The use of X values here is different from
previous diagnosis methods [8], [15]–[17], where X values are
used to model the unknown behavior of a logically-bounded
defect. We use X values instead to represent the simultaneous
interactions among all potential sites.
Next, fault-free values are assigned to all the passing outputs
whose values have changed during X propagation. A “conservative” implication is applied beginning with these passing
outputs. Conservative implication is a form of implication for
Consider a signal line si that is implied to a value vi ∈ {0, 1}
for a failing pattern tk . If si is implied to be vi through forward
implication, si is actually assigned to value vi only if it is not
a potential defect site for any failing pattern. If, on the other
hand, si is implied to vi through backward implication, then
value vi is assigned to si regardless of whether it is a potential
defect site or not. This rule is justified since si must be vi for
its downstream passing points to have the observed values.
If a site si is assigned to a value vi through conservative
backward implication in tk , si must have value vi in order
for its defect-free downstream logic to have correct values. si
is, therefore, eliminated if it is in the set of potential defect
sites identified by path-tracing pattern tk . Sites eliminated
through this analysis are likely to be near the observable
points. Whenever a site si is removed, other sites that were
implicated by path-tracing only through si are also removed.
This transitive removal of other sites leads to the elimination
of sites that are farther away from the observable points.
Since interactions among all potential defect sites are considered in conservative implication, the elimination of sites
in one pattern may lead to changes in circuit states deduced
from conservative implication in other patterns. Thus, alreadyeliminated sites can lead to the elimination of other sites, as
described in the outermost while loop of Algorithm 1. The
procedure terminates when no more sites are eliminated in a
given iteration in the outermost while loop of Algorithm 1.
All possible defect-site combinations produced by pathtracing and all possible maskings are taken into account
when eliminating sites. Moreover, no assumption is made
about defect behavior in DSIE. Therefore, if every defect site
propagates its error to at least one failing observable point,
then DSIE is conservative, that is, it cannot remove any defect
site that contributes to the failing responses.
Subsequent work reported in [7] applies a similar idea
to limited defect behaviors, namely, multiple stuck-at faults.
Defects whose behavior deviates from stuck-at behavior are,
therefore, likely eliminated incorrectly by their approach. In
addition, work in [7] uses simulation to identify and eliminate
sites, as opposed to conservative implication. Simulation is
less efficient since each site has to be evaluated separately
and the entire circuit is considered. On the other hand, when
using conservative implication, all possible sites that can be
eliminated are evaluated by determining all signal values only
once.
980
IEEE TRANSACTIONS ON COMPUTER-AIDED DESIGN OF INTEGRATED CIRCUITS AND SYSTEMS, VOL. 29, NO. 6, JUNE 2010
pattern, b2 is also removed from the set of potential defect sites
for the second failing pattern.
For the example of Fig. 2, in the first iteration of conservative implication and site elimination, no sites can be eliminated
for the first failing pattern. For the second failing pattern, l and
b2 are removed from the set of potential defect sites for the
second pattern. No more sites can be eliminated in the second
iteration, so the procedure terminates. Therefore, considering
the possible errors on each site recorded during path-tracing,
the set of candidates after DSIE include {m/1, i/1, a/1, b1 /1,
b/1, h1 /1, h/1, c/0, n/1, h2 /1, j1 /1, e/1, f/1, j/1, j2 /1, p/0,
q/1, j3 /1, d1 /0, d/0, k1 /1, k/1, g/1, b3 /1, r/1, k2 /1, l1 /1}.
III. Candidate Forest
The number of candidates after DSIE is applied can still
be significant. Thus, a smaller group of candidates should be
selected, if possible. In this section, we first analyze the effects
of each individual candidate on the CUD using path-based
behavior evaluation (Section III-A). Then, a candidate forest
is constructed based on the results of this analysis to better
guide diagnosis (Section III-B). The candidate forest is used
to perform candidate selection in Section IV.
A. Path-Based Behavior Evaluation
Fig. 3. Signal values for the example of Fig. 2 after fault-free simulation,
unknown value injection, X value propagation, and fault-free value assignment
to the passing outputs, for two failing patterns: (a) t1 (abcdefg) = 0010001;
and (b) t2 (abcdefg) = 0001010.
For the example CUD of Fig. 2, the signal values after
executing fault-free simulation, unknown value injection, Xvalue propagation, and fault-free value assignment to the
passing outputs are shown in Fig. 3. To illustrate conservative
implication and site elimination, we use the second failing
pattern of Fig. 3 as an example. Since l2 is not a potential
defect site for either of the failing patterns, both backward
and forward implication can be performed from l2 according
to the implication rule. Since l is implied to a value 0
through backward implication from l2 , it is assigned to value 0
according to the assignment rule. According to the implication
rule, only forward implication can be performed for l since it
is a potential defect site for the second failing pattern. Thus,
l1 is implied to a value 0 through forward implication from l.
Since l1 is a potential defect site, l1 is not assigned to value 0
according to the assignment rule. Since l is assigned to value
0 through backward implication, it is eliminated from the set
of potential defect sites identified by path-tracing the second
failing pattern. Since signal line b2 is identified as a potential
defect site when path-tracing only from l for the second failing
Given a test pattern tk , if a defect at site si is activated,
then si has an erroneous value in pattern tk . The resulting
error may propagate to some other signal lines in the CUD
along paths that are properly sensitized, which is the effect si
has on the CUD for tk . The side inputs of the gates on the
error propagation path must have noncontrolling values for the
path to be sensitized. In some cases, the error from site si can
propagate to outj when all the side inputs of the gates on the
error propagation path have fault-free values. In other cases,
the error from site si can propagate to an observable point outj
only when some side inputs have erroneous values, which is
possible in the context of reconvergent fanouts or multipledefective sites. In other words, when there are multipledefective sites in the CUD, some observable points may fail
due to the combined effects of several defective sites. In order
to avoid explicitly analyzing the effects of combinations of
candidates on the CUD, it is necessary to capture the effects
of each individual candidate for every failing pattern. The only
effects that can be captured are those that produce errors at
the observable points, which can be represented using the error
propagation environment of a candidate. To properly describe
this situation, we first introduce the following definitions.
Definition 1: Candidate si /vi is said to output-explain an
observable point outj for a failing pattern tk if the fault-free
value on site si is vi and an error from si propagates to outj in
tk when all the side inputs of the on-path gates have fault-free
values.
Definition 2: Candidate si /vi is said to partially outputexplain an observable point outj for a failing pattern tk if the
fault-free value on site si is vi and an error from si propagates
to outj in tk only when some side inputs of the on-path gates
have erroneous values.
YU AND BLANTON: DIAGNOSIS OF INTEGRATED CIRCUITS WITH MULTIPLE DEFECTS OF ARBITRARY CHARACTERISTICS
TABLE I
Per-Test Path Sets for Candidates From Fig. 2
Candidate
ID
f0
f1
f2
f3
f4
f5
f6
f7
f8
f9
f10
f11
f12
f13
f14
f15
f16
f17
f18
f19
Stuck-At Fault
Equivalence Class
m/1
i/1
a/1
b1 /1
b/1
h1 /1
h/1
c/0
n/1
h2 /1
j1 /1
e/1, f/1, j/1
j2 /1, p/0
q/1
j3 /1
d1 /0
d/0
k1 /1
k/1, g/1, b3 /1
r/1, k2 /1, l1 /1
Per-Test Path Set
Failing Pattern 1
Failing Pattern 2
{m}
{m}
{m}
{m}
{a−m}
{a−m}
{b1 −m}
{b1 −m}
{b1 −m}
{b1 −m, q, r}
{m}
{m}
{m, h2 −n}
{m, n}
{m, h2 −n}
∅
{n}
{n}
{h2 −n}
{n}
{j1 −n}
∅
{j1 −n, p, q}
∅
{p}
∅
{q}
{q}
{q}
∅
∅
{m, n}
∅
{m, n}
∅
{q}
∅
{q, r}
∅
{r}
Definition 3: Let pijk be the path along which an error from
site si propagates to an observable point outj for a failing
pattern tk . Let si −Ji be the longest subpath in pijk such that
an error from si can propagate to Ji when all the side inputs
of on-path gates have fault-free values, where Ji is an on-path
gate input or the observable point outj . The remaining subpath
of pijk (i.e., Ji −outj ) is called the under-explained subpath
of pijk .
If candidate si /vi output-explains outj , the under-explained
subpath from site si to outj is simply outj , a path of length 0.
In the case where si /vi partially output-explains outj , the length
of the corresponding under-explained subpaths is at least one.
In the latter case, there can be more than one under-explained
subpath since there could be multiple paths from site si to
outj that can be properly sensitized. It is possible however
that some paths cannot be properly sensitized. Consider the
CUD in Fig. 2, for example. There is one path from site d
to output r, namely d−d2 −l−l1 −r. However, in the second
failing pattern, since signal line b2 has controlling value 0 and
signal line d2 has noncontrolling value 1, it is impossible for
an error at d to flip the value at gate-output l. Therefore, there
is no path that can be properly sensitized to propagate the error
from d to r for the second failing pattern. Identifying all paths
that can be properly sensitized to enable error propagation to
a set of failing observable points can be easily accomplished
using an approach similar to path-tracing.
Given a failing observable point outj that candidate si /vi
(partially) output-explains, the corresponding under-explained
subpaths capture the error propagation environment from site
si to outj , which is the effect of the defect at site si on outj .
In order to capture the error propagation environment of all
candidates, a path-set is recorded for each candidate si /vi . For
each of si /vi ’s (partially) output-explained failing observable
points outj in failing pattern tk , the under-explained subpath
981
Algorithm 2 Path-Set Creation
for each candidate si /vi do
Initialize Pi to be empty
for each failing test tk do
Initialize Pik to be empty
for each failing output outj that si /vi output-explains do
Add outj to set Pik
end for
for each failing output outj that si /vi partially output-explains do
Add Ji −outj to set Pik
end for
Add Pik , which is the per-test path set of si /vi for tk , to set Pi
end for
Pi is the path set for candidate si /vi
end for
Ji −outj is added to the per-test path set Pik for tk . The path
set Pi for si /vi is a set composed of all Pik ’s. Pseudo-code
describing path set creation is given in Algorithm 2. However,
path sets can be more efficiently deduced for all candidates
using a procedure similar to path-tracing.
The CUD in Fig. 2 is used to illustrate path set creation.
For each failing pattern tk , per-test path sets are derived for
candidates surviving DSIE (Table I). For example, for the first
failing pattern, the error from site h can propagate to failing
output m when all the side inputs along the error propagation
path h−h1 −m have fault-free values. On the other hand, the
error from h can propagate to failing output n only when side
input j1 has an erroneous value. There is no error propagation
path from site h to output p or q. Therefore, the per-test path
set of h/1 for the first failing pattern is {m, h2 −n}.
Path-based behavior evaluation is able to capture the combined effects of multiple-defects, as well as effects of a single
defect. Thus, we avoid simulating combinations of candidates,
which prevents the complexity of diagnosis from growing exponentially with the number of defects in the CUD. Moreover,
this path-based behavior evaluation method does not rely on
the existence of any particular failing pattern characteristics
and is not based on any assumptions of defect behavior.
B. Candidate Forest Formation
In order to effectively guide diagnosis, we construct a candidate forest based on the path-sets according to the following
rules.
1) Rule 1: Candidates with exactly the same path-sets are
grouped to form a node.
2) Rule 2: Consider two nodes A and B with candidate
fa ∈ A and fb ∈ B. By comparing their corresponding
path-sets, node B is deemed to be parent of node A in
the forest if: 1) the path-set of fa is a proper subset of
the path-set of fb ; and 2) the path-set of fa is not a
proper subset of any candidate in the child node(s) of
B. This proper subset relationship is formally stated in
Definition 4.
3) Rule 3: There is a directed edge from node A to node
B if A is a parent of B.
Definition 4: The per-test path set Pak of candidate fa for
failing pattern tk is a proper subset of the per-test path set
Pbk of candidate fb for tk if Pak = Pbk and for every path
pak ∈ Pak , there exists a path pbk ∈ Pbk such that pak = pbk
982
IEEE TRANSACTIONS ON COMPUTER-AIDED DESIGN OF INTEGRATED CIRCUITS AND SYSTEMS, VOL. 29, NO. 6, JUNE 2010
or pbk is a subpath of pak . The path set Pa of candidate fa is
a proper subset of the path set Pb of candidate fb if Pa = Pb
and for every per-test path set Pak ∈ Pa , there exists a per-test
path set Pbk ∈ Pb such that Pak = Pbk or Pak is a proper subset
of Pbk .
Fig. 4 shows an example candidate forest that is constructed
based on the path-sets shown in Table I. For example, candidates f15 and f16 have exactly the same per-test path sets for
the two failing patterns of the CUD of Fig. 2. Therefore, f15
and f16 are in the same node according to Rule 1. Candidate
f6 has the same per-test path set as f15 and f16 for the second
failing pattern. However, for the first failing pattern, the pertest path set of f6 is {m, h2 −n}, while the per-test path set
of f15 and f16 is empty. Therefore, the path set of f15 and
f16 is a proper subset of the path set of f6 . Since there is
no candidate whose path set is both a proper subset of f6 ,
and a proper superset of the path set of f15 and f16 , the node
consisting of f15 and f16 is a child of the node consisting
of f6 according to Rule 2. As a result, there is a direct edge
from the node consisting of f6 (S0 ) to the node consisting
of f15 and f16 (S6 ) according to Rule 3. Candidates f4 and
f6 have different path sets, and there is no set subsumption
relationship between the per-test path sets of f4 and f6 for
failing pattern 2. So, f4 and f6 are in different, isolated nodes
with no directed path between the two nodes.
The candidate forest is a structured representation of the
effects of all possible candidates on a failing CUD. According
to the way a candidate forest is constructed, the candidates in
the same node have the same effects on the failing observable
points. For example, in Fig. 4, candidates f15 and f16 are in
the same node S6 . For the second failing pattern of Fig. 2, an
error from either f15 or f16 can propagate to outputs m and
n when all the side inputs have fault-free values. More, it is
impossible for any of them to produce an error at output q and
r. Neither f15 nor f16 have an effect on the CUD for the first
failing pattern. Therefore, the error propagation requirements
for f15 and f16 are the same under the test set. So, they have
the same effect on the failing observable points.
Candidates in different forest nodes, of course, have different effects on the failing observable points. Consider two
nodes A and B with candidate fa ∈ A and candidate fb ∈ B.
If B is a parent of A, then the effects that fa has on the
failing observable points are subsumed by the effects of
fb . Specifically, for every failing test tk and every failing
point outj that fa (partially) output-explains in tk , the set of
erroneous side inputs that can propagate an error from fa to
outj can also propagate the error from fb to outj . However, the
converse is not true. In other words, fb can (partially) outputexplain more failing observable points, or requires a smaller
set of erroneous side inputs to propagate its error to a failing
observable point that is partially output-explained by fa . More
generally, the effects of any candidate in node B subsume the
effects of any candidate in node A on failing points if there
is a directed path from B to A in the candidate forest. For
example, there is a directed path from the node that contains
f8 to the node containing f9 (see Fig. 4). f8 output-explains
output n for both failing patterns, while f9 partially outputexplains n for the first failing pattern and output-explains n for
the second failing pattern. Neither of them (partially) outputexplains any other failing outputs. Therefore, the effects of f8
subsumes the effects of f9 .
If there is no directed path between forest nodes A and B,
the candidates in A and B have unique impact on the failing
observable points, although their overall effects may overlap
for some of the logic cones. Consider nodes S2 and S3 in
Fig. 4 for example. Both of them output-explain output q for
the first failing pattern. However, f13 output-explains q for the
second failing pattern, while f11 does not. On the other hand,
f11 output-explains p and partially output-explains n for the
first failing pattern, but f13 (partially) output-explains neither
of them. So, f11 and f13 have their own unique effects on the
failing observable points, even though the effects of f11 and
f13 on failing point q overlap for the first failing pattern.
IV. Candidate Selection and Ranking
In this section, our candidate selection and ranking that
utilizes the candidate forest is described. We first select a nearminimal group of candidates that can jointly output-explain the
observed failing responses. Candidates that have an equivalent
effect are then identified. Among the selected candidates that
have the equivalent effect on the failing points, we identify
and rank those candidates that produce the least mismatch at
passing points for the failing patterns. The details of each step
are described in the following sections.
A. Candidate Selection
The candidate selection step greedily selects a near-minimal
group of nodes such that the candidates in the selected nodes
jointly output-explain all the observed failing points. Similar
to what is analyzed in [2], deriving the smallest group of candidates may lead to incorrect diagnosis, but this shortcoming is
difficult to overcome since examining all combinations would
greatly increase the complexity of diagnosis.
According to Section III-B, if there is a directed path
from B to A in the candidate forest, then the effects of the
candidates in node B subsume the effects of the candidates in
A. Therefore, the effects of the candidates in a root node of the
candidate forest subsume the effects of any candidates in its
decedent nodes. Therefore, the candidate selection procedure
selects one root node A at a time such that candidates in
A output-explain the most failing points that are not outputexplained by candidates already selected. The pseudo-code
for candidate selection is given in Algorithm 3. The number
of nodes selected is an estimation of the number of actual
defective sites in the CUD since candidates in different nodes
have unique effects on the CUD.
For the example CUD of Fig. 2, there are five root nodes
in the candidate forest formed from the candidates surviving
DSIE (Fig. 4). Candidates in the root nodes include f4 , f6 ,
f8 , f11 , and f13 . Table II shows the nodes and their outputexplained points. S0 is selected in the first iteration since
the candidates in S0 output-explain more failing points than
the candidates in nodes S1 , S2 , S3 , and S4 . In the second
iteration, the combined effects of the candidates in S0 and
S3 output-explain three of the remaining failing points that
YU AND BLANTON: DIAGNOSIS OF INTEGRATED CIRCUITS WITH MULTIPLE DEFECTS OF ARBITRARY CHARACTERISTICS
Fig. 4.
983
Candidate forest corresponding to candidates shown in Table I.
Algorithm 3 Candidate Selection
Algorithm 4 Equivalent Candidate Identification
Sr = {roots in the candidate forest}
Ssel = {the selected nodes}
FO = {failing observable points not output-explained by Ssel }
Initialize Ssel = ∅ and FO = all failing observable points
while FO = ∅ do
Select node A ∈ Sr that leads to maximal reduction in FO
Ssel = Ssel ∪ {A}
FO = FO− {points jointly output-explained by candidates in Ssel }
end while
TABLE II
Ssel = {selected nodes from candidate selection}
for each node A ∈ Ssel do
Initialize Queue = {A’s child nodes} ∪ {root nodes} − Ssel
while Queue = ∅ do
N=pop front(Queue)
Se = Ssel ∪ N − A
if candidates in Se jointly explain all failing points then
Queue = Queue∪ {N’s child nodes}
A=A∪N
end if
end while
end for
Candidates in the Roots of the Candidate Forest of Fig. 4 and
Their Output-Explained Points for the CUD of Fig. 2
Node
S0
S1
S2
S3
S4
= {f6 }
= {f4 }
= {f13 }
= {f11 }
= {f8 }
Observed Failing Outputs
Failing Pattern 1
Failing Pattern 2
m
n
p
q
m
n
q
r
✓
✓
✓
✓
✓
✓
✓
✓
✓
✓
✓
are not output-explained by candidates in S0 alone, including
output n for the first failing pattern. However, the combined
effect of the candidates in S0 and S1 , S0 and S2 , S0 and S4
output-explains fewer than three of the failing points that are
not output-explained by the candidate in S0 alone. Therefore,
S3 is selected in the second iteration. The combined effect of
the candidates in S0 , S1 , and S3 output-explains all the failing
points. However, the combined effect of the candidates in S0 ,
S2 , and S3 does not output-explain all the failing points, nor
does the combined effect of the candidates in S0 , S3 , and S4 .
So, S1 is selected in the third iteration. Candidate selection
terminates after three iterations since the combined effects
of sites f4 , f6 , and f11 output-explain all failing observable
points. The total number of nodes selected is three, so the
estimated number of defective sites in the CUD is three, which
happens to be correct.
B. Equivalent Candidate Identification and Ranking
Candidates in the unselected nodes have different effects
on the CUD as compared to those from the selected nodes.
However, given some selected nodes, candidates in different
nodes A and B may be able to produce the same failing
response. In this situation, candidates in node A and B are
said to have equivalent effects on the failing points given the
selected nodes. After the candidate selection step, we identify
nonselected candidates that have equivalent effects on the
failing points as the selected. Specifically, let Ssel be the set of
nodes selected in the candidate selection step. For each node
A ∈ Ssel , if some other node N has the property that candidates
in the node set Ssel ∪ {N} − {A} jointly output-explain all
failing points, then candidates in node N have the equivalent
effect on the failing observable points as the candidates in
node A given the selected group of nodes. N is, therefore,
selected in this equivalent-candidate identification step. Since
node A is selected due to the effects of its candidate elements
on the failing observable points, the nodes whose candidate elements have equivalent effects as A must be among:
1) the root nodes; 2) the tree rooted at the node A; or
3) the trees rooted at the nodes whose candidate elements have
the equivalent effects as A. The pseudo-code for equivalent
candidate identification is given in Algorithm 4. In a real
application of diagnosis, it is necessary to set an upper limit for
reporting equivalent candidates since physical failure analysis,
a process for determining the real defect location, is very time
consuming. It is, therefore, applicable only when there are few
candidates reported for a defect site. As a result, the estimated
number of defective sites, which is derived in the candidate
selection step, is a good guidance for setting this upper limit.
Among the candidates that have an equivalent effect on the
failing points, we prefer those that cause the least number of
passing points to fail for the failing patterns. This step is based
on the observation that an actual defect site will probably
have weaker evidence for supporting passing-point failure.
The candidates identified constitute our diagnosis output and
they are ranked according to their number of output-explained
failing observable points, since sites that output-explain more
failing points are more preferred.
For the example CUD of Fig. 2, the candidate forest for the
sites surviving DSIE is shown in Fig. 4. Nodes S0 , S1 , and S3
984
IEEE TRANSACTIONS ON COMPUTER-AIDED DESIGN OF INTEGRATED CIRCUITS AND SYSTEMS, VOL. 29, NO. 6, JUNE 2010
are selected in the candidate selection step. Apart from node
S1 , only node S8 has the property that the combined effects of
its candidates and the candidates in S0 and S3 output-explain
all the failing points. Therefore, f18 has the equivalent effect
as f4 given the selected nodes. f4 fails one passing observable
point, while f18 causes no the passing-point failure. So, f18 is
identified as a final diagnosis callout. No candidate in any of
the unselected nodes has the equivalent effect as a candidate
in either S0 or S3 . So, f6 and f11 are also identified as final
diagnosis candidates. Therefore, the output of diagnosis for the
example CUD of Fig. 2 is f6 , f11 , and f18 , which corresponds
to faults h/1, j/1, and k/1. h/1 is ranked first since it outputexplains more failing points than j/1 and k/1. Since there are
three defective sites h, j, and k in the example CUD of Fig. 2,
this diagnosis output is correct.
V. Experiment Results
In our experiments, we use the larger ISCAS’89 benchmarks
[18]. A test set generated by Atalanta [19] that achieves near
100% stuck-at fault coverage is used for diagnosis. Permanent
stuck-at, two-line (AND and OR-type) bridge, and transition
faults are used in this simulation experiment. For each circuit,
each fault type, and multiplicity, we consider 60 random fault
injections3 for a total of 5700 different faulty circuits. For
each of the 5700 faulty circuits, our diagnosis consisting of
DSIE, candidate forest formation, and candidate selection and
ranking was performed.
On average, applying DSIE leads to 30% fewer candidates
than applying only path-trace. For all 5700 faulty circuits,
there was not one case where an actual defect site was removed
by conservative implication when all defective sites propagated
their errors to at least one of the failing observable points. In
Section III, we showed the construction of a candidate forest
and that those candidates whose effects cannot be subsumed
by others were in forest roots. In this experiment, the average
percentage of actual defect sites being in one of the forest
root nodes is 91%, while the candidates in the roots only
constitute 13% of the candidates surviving DSIE. This shows
that candidate forest is effective in guiding diagnosis.
Figs. 5–7 report results for multiple stuck-at, two-line
bridge, and transition faults, respectively. The diagnosis quality
is evaluated using two metrics, namely, diagnosability and
resolution. Diagnosability and resolution are two important
measures of effectiveness of a diagnosis algorithm. Diagnosability is defined as SD /SI , where SD is the number of actual
defect sites identified by diagnosis and SI is the number of
defect sites injected. Resolution is defined as SI /ST , where ST
(≥SD ) is the total number of sites reported by diagnosis. For
any diagnosis approach, the ideal outcome is for resolution
and diagnosability to simultaneously both be one, that is,
SD /SI = SI /ST = 1.0.
3 Multiple faults are injected by randomly selecting a site and randomly
deciding its behavior (i.e., stuck-at-0 or stuck-at-1 for stuck-at faults, ANDtype or OR-type for bridge faults, and slow-to-rise or slow-to-fall for transition
faults) The fault is injected into the circuit unless a fault has already been
injected at that site. The injection repeats until the number of faults injected
reaches the required multiplicity.
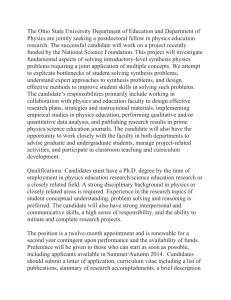
Fig. 5. (a) Diagnosability and (b) resolution for a varying number of
randomly-injected stuck-at faults (averaged over 60 injections in five benchmarks).
When diagnosing CUDs affected by multiple stuck-at or
transition faults of size five or less, the average diagnosability
and resolution is 88% and 59%, respectively. Moreover, CUDs
affected by >20 multiple stuck-at or transition faults are
successfully diagnosed, with an average diagnosability of
79% and resolution of 78%. The average diagnosability and
resolution when diagnosing CUDs affected by a single twoline bridge fault are 88% and 47%, respectively. Moreover,
when diagnosing CUDs affected by >20 multiple two-line
bridge faults, our diagnosis methodology achieves an average
diagnosability and resolution of 63% and 93%, respectively.
The maximum standard deviation for diagnosabiltiy in Figs. 5–
7 is 0.03 and the maximum standard deviation for resolution
in Figs. 5–7 is 0.07.
It is shown that our diagnosis approach is able to effectively
diagnose circuits affected by a small and large number of
randomly-injected defects for all three types with good diagnosability and resolution. To the best of our knowledge,
the number of random defects injected in the experiments
of existing papers for other approaches are no more than
five. Moreover, this approach does especially well for a
large number of bridge faults. The reason that this proposed
approach performs better on bridge faults is that no assumption
is made about the defect behavior.
The sites selected by our diagnosis methodology are ranked
using the approach described in Section IV. Percentage first hit
YU AND BLANTON: DIAGNOSIS OF INTEGRATED CIRCUITS WITH MULTIPLE DEFECTS OF ARBITRARY CHARACTERISTICS
985
Fig. 6. (a) Diagnosability and (b) resolution for a varying number of
randomly-injected bridge faults (averaged over 60 injections).
Fig. 7. (a) Diagnosability and (b) resolution for a varying number of
randomly-injected transition faults (averaged over 60 injections).
is defined as the average percentage that an injected defect site
is top ranked (i.e., ranked number one). Percentage first hit in
this experiment is 85%. This means among the 5700 different
faulty circuits in this experiment, there are 4845 CUDs whose
top ranked candidate site is an actual defect site.
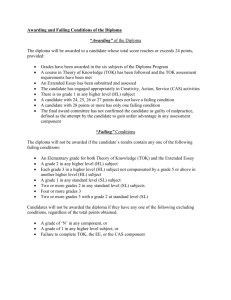
Fig. 8 shows the relationship between the number of defect
sites estimated by our diagnosis methodology and the actual
number of defect sites injected in the simulation experiment.
Defective sites are injected at multiplicities of x ∈ {2, 4, 5, 7,
10, 14, 15, 20, 21}. The dotted line represents the ideal case
where the estimated number of defective sites always agrees
with the actual number injected. The solid line represents
the estimated number of defective sites versus the actual
number of injected defective sites in this experiment. Data
points on the solid line are the means of the estimations. The
plot shows the means of the estimations are within 20% of
the ideal cases. The vertical bar across a mean represents
the standard deviation of the estimations above and below the
mean. It shows that the estimated numbers of defective sites
for a certain number of injected defective sites cluster closely
around the mean. For small numbers of injected defects, there
is very good agreement between injected and estimated. For
example, when diagnosing circuits affected by two defective
sites, in 83% of the cases, our method estimates there are
two defective sites. The amount of mis-prediction increases
however for the larger numbers. We believe there are two
reasons for this phenomenon. First, when many defects exist
within the CUD, it is likely that some are never activated
by the applied test set. Second, due to the greedy nature of
Algorithm 3, it is likely that some actual defect sites are
not selected. For both reasons, our prediction would underestimate the number of actual defective sites when the CUD is
affected by a large number of defective sites. This explanation
is supported by the downward error bias shown in Fig. 8.
Several CUDs that had no SLAT patterns are encountered
during our simulation experiments. Table III shows the performance of our methodology in diagnosing these CUDs. For
many of these circuits, the resolution and diagnosability are
outstanding. This is a very good result given that many techniques would simply abort for these CUDs [2], [14]. Moreover,
it is likely that techniques that rely on SLAT patterns would
also have considerable difficulties for the remaining CUDs
since many of the SLAT patterns produced are actually due to
interacting faulty lines.
Since no assumption is made about the defect behavior under diagnosis, this method is expected to perform consistently
for defects with arbitrary behavior. To demonstrate this point,
we randomly-inject three stuck-at, three two-line bridge, and
three transition faults into the larger ISCAS’89 benchmarks
[18], and apply diagnosis. This experiment is repeated 60 times
for each of the five benchmark circuits. Table IV shows the
resulting (average) diagnosability, resolution, and percentage
986
IEEE TRANSACTIONS ON COMPUTER-AIDED DESIGN OF INTEGRATED CIRCUITS AND SYSTEMS, VOL. 29, NO. 6, JUNE 2010
TABLE IV
Diagnosability, Resolution, and Percentage First-Hit Rate for
Simultaneous, Randomly-Injected Stuck-At, Two-Line Bridge,
and Transition Faults of Multiplicity Three for Each Type
(Twelve Defective Sites) Averaged Over 60 Injections
Circuit
s13207
s15850
s35932
s38417
s38584
Diagnosability
(SD /SI )
0.77
0.75
0.75
0.90
0.82
Resolution
(SI /ST )
0.83
0.77
0.64
0.83
0.96
% First
Hit
91%
77%
92%
97%
93%
Fig. 8. Relationship between the estimated and actual number of defect sites
injected.
TABLE III
Diagnosis Performance on CUDs With No SLAT Patterns
Circuit
s13207
s15850
s35932
s38417
s38584
No. of
CUDs With
no SLAT
Patterns
63
42
71
10
11
Diagnosability
(SD /SI )
Resolution
(SI /ST )
%
First
Hit
0.72
0.72
0.83
0.90
0.90
0.89
0.87
0.61
0.87
0.95
81%
71%
89%
90%
100%
first hit. The results indicate that our methodology can effectively diagnose circuits that are simultaneously affected by
multiple failing mechanisms.
Finally, we perform diagnosis on 131 failing arithmetic
logic unit (ALU) chips provided by LSI. These chips are
manufactured in 0.11 µm technology. Since there are no
physical failure analysis (PFA) results for these chips, the
defects actually affecting the chips are unknown. These ALUs
have some non-SLAT patterns, indicating that each has at
least two simultaneously defective lines. We report a total
of 456 sites for these failing ALUs, while the traditional
diagnosis technique of [20] reports 1372 sites in total. Thus,
the diagnosis resolution of our methodology is 3x better
than the traditional approach. Although the diagnosability of
the two methods cannot be directly compared since PFA
results are not available for these failures, the accuracy of our
methodology has already been demonstrated in the simulation
experiments.
Fig. 9 shows the diagnosis time of s35932 for a varying
number of injected faults. It indicates that the proposed
methodology scales well with the number of “defects” in the
CUD. The average CPU time for diagnosing a failing pattern is
6.5 seconds for failing ALU chips affected by multiple-defects.
We expect to improve the execution time dramatically however
by exploiting the inherent parallelism that exists within the
various tasks that constitute DSIE, candidate forest creation,
and candidate selection.
Fig. 9. Diagnosis time of s35932 for a varying number of randomly-injected
candidates (averaged over 20 injections).
Fig. 10. Memory usage for diagnosing s35932 for a varying number of
randomly-injected candidates (averaged over 20 injections).
We use s35932 as an example to show the memory consumption of our method. Fig. 10 shows the memory usage for
diagnosing s35932 for a varying number of injected faults of
different types. The memory used for creating the candidate
forest constitutes less than 10% of the total memory used.
Memory can likely be reduced by exploring improved data
structures.
VI. Conclusion
In this paper, we described a multiple-defect diagnosis
methodology that is flexible in handling a large number of
defects, various defect behaviors, and arbitrary failing pattern
YU AND BLANTON: DIAGNOSIS OF INTEGRATED CIRCUITS WITH MULTIPLE DEFECTS OF ARBITRARY CHARACTERISTICS
characteristics. As shown by the simulation experiments, the
methodology is also able to accurately estimate the number of
defective sites in the CUD. Moreover, it has the characteristic
that it scales well with the number of defects in the CUD.
This methodology can be used to diagnose CUDs that cannot
be diagnosed by existing diagnosis methods.
References
[1] M. Abramovici, M. A. Breuer, and A. D. Friedman, “Logic-level
diagnosis,” in Digital Systems Testing and Testable Design. Piscataway,
NJ: IEEE, 1990, pp. 541–568.
[2] T. Bartenstein, D. Heaberlin, L. Huisman, and D. Sliwinski, “Diagnosing
combinational logic designs using the single location at-a-time (SLAT)
paradigm,” in Proc. Int. Test Conf., 2001, pp. 287–296.
[3] Y.-C. Lin, F. Lu, and K.-T. Cheng, “Multiple-fault diagnosis based on
adaptive diagnostic test pattern generation,” IEEE Trans. Comput.-Aided
Design Integr. Circuits Syst., vol. 26, no. 5, pp. 932–942, May 2007.
[4] I. Pomeranz, S. Venkataraman, S. Reddy, and B. Seshadri, “Z-sets and zdetections: Circuit characteristics that simplify fault diagnosis,” in Proc.
Design Autom. Test Eur., 2004, pp. 68–75.
[5] M. Abramovici and M. A. Breuer, “Multiple fault diagnosis in combinational circuits based on an effect-cause analysis,” IEEE Trans. Comput.,
vol. 29, no. 6, pp. 451–460, Jun. 1980.
[6] H. Takahashi, K. O. Boateng, K. K. Saluja, and Y. Takamatsu, “On diagnosing multiple stuck-at faults using multiple and single fault simulation
in combinational circuits,” IEEE Trans. Comput.-Aided Design (CAD)
Integr. Circuits Syst., vol. 21, no. 3, pp. 362–368, Mar. 2002.
[7] M.-J. Tasi, M. C.-T. Chao, J.-Y. Jou, and M.-C. Wu, “Multiple-fault
diagnosis using faulty-region identification,” in Proc. Very-Large-Scale
Integr. (VLSI) Test Symp., 2009, pp. 123–128.
[8] V. Boppana, R. Mukherjee, J. Jain, M. Fujita, and P. Bollineni, “Multiple
error diagnosis based on Xlists,” in Proc. Design Autom. Conf. (DAC),
Jun. 1999, pp. 660–665.
[9] C. Thibeault, “On the adaptation of viterbi algorithm for diagnosis of
multiple bridging faults,” IEEE Trans. Comput., vol. 49, no. 6, pp. 575–
587, Jun. 2000.
[10] D. B. Lavo, I. Hartanto, and T. Larrabee, “Multiplets, model, and the
search for meaning: Improving per-test fault diagnosis,” in Proc. Int.
Test Conf., 2002, pp. 250–259.
[11] X. Yu and R. D. Blanton, “Multiple-defect diagnosis using no assumptions on failing pattern characteristics,” in Proc. Design Autom. Conf.
(DAC), 2008, pp. 361–366.
[12] X. Yu and R. D. Blanton, “An effective and flexible multiple-defect
diagnosis methodology using error propagation analysis,” in Proc. Int.
Test Conf., 2008, pp. 1–9.
[13] S. Venkataraman and W. Fuchs, “A deductive technique for diagnosis
of bridging faults,” in Proc. Int. Conf. Comput.-Aided Design (CAD),
1997, pp. 562–567.
[14] R. Desineni, O. Poku, and R. D. Blanton, “A logic diagnosis methodology for improved localization and extraction of accurate defect behavior,” in Proc. Int. Test Conf., 2006, pp. 1–10.
[15] V. Boppana and M. Fujita, “Modeling the unknown! Toward modelindependent fault and error diagnosis,” in Proc. Int. Test Conf., 1998,
p. 1094.
[16] A. L. D’Souza and M. S. Hsiao, “Error diagnosis of sequential circuits
using region-based model,” in Proc. Int. Conf. Very-Large-Scale Integr.
(VLSI) Design, Jan. 2001, p. 103.
[17] N. Sridhar and M. S. Hsiao, “On efficient error diagnosis of digital
circuits,” in Proc. Int. Test Conf., Oct.–Nov. 2001, pp. 678–687.
[18] F. Brglez, D. Bryan, and K. Dozminski, “Combinational profiles of
sequential benchmark circuits,” in Proc. Int. Symp. Circuits Syst., 1989,
pp. 1929–1934.
[19] H. Lee and D. Ha, “On the generation of test patterns for combinational
circuits,” Dept. Electr. Eng., Virginia Polytechnic Inst. State Univ.,
Middleburg, Tech. Rep. 12-93, 1993.
[20] J. A. Waicukauski and E. Lindbloom, “Failure diagnosis of structured
VLSI,” IEEE Design Test Comput. (DAC), vol. 6, no. 4, pp. 49–60, Aug.
1989.
987
Xiaochun Yu (S’08) received the B.S. degree in
microelectronics from Fudan University, Shanghai,
China, in 2005, and the M.S. degree in electrical
and computer engineering from the Department of
Electrical and Computer Engineering, Carnegie Mellon University, Pittsburgh, PA, in 2008, where she is
currently working toward the Ph.D. degree.
Her current research interests include the area of
very large scale integration testing, diagnosis, and
defect characterization.
Dr. Yu is a recipient of an Intel Ph.D. Fellowship,
and a Bertucci Graduate Fellowship.
Ronald DeShawn Blanton (S’93–M’95–SM’03–
F’09) received the B.S. degree in engineering from
Calvin College, Grand Rapids, MI, in 1987, the M.S.
degree in electrical engineering from the University
of Arizona, Tucson, in 1989, and the Ph.D. degree
in computer science and engineering from the University of Michigan, Ann Arbor, in 1995.
He is currently a Professor with the Department
of Electrical and Computer Engineering, Carnegie
Mellon University, Pittsburgh, PA, where he serves
as the Director of the Center for Silicon System
Implementation, an organization consisting of 18 faculty members and over
80 graduate students focusing on the design and manufacture of siliconbased systems. His current research interests include the test and diagnosis
of integrated, heterogeneous systems and design-, manufacture-, and testinformation extraction from tester measurement data.