Modeling and Development of Piezoceramic Energy Harvester for Munitions Applications
advertisement

Modeling and Development of
Piezoceramic Energy Harvester
for Munitions Applications
A Thesis
Presented to
the Faculty of the Department of
Electrical Engineering
Villanova University
In Partial Fulfillment
of the Requirements for the Degree of
Master of Electrical Engineering
by
Sean Ryan Pearson
19 April, 2006
Under the Direction of
Dr. Pritpal Singh
ii
Student’s Full Name ___Sean Pearson________________________________________
Department __Electrical and Computer Engineering_______________
_____
Full Title of Thesis ________________________________________________________
Modeling and Development of Piezoceramic Energy Harvester for Munitions
Applications
Date Submitted _____April_____________2006_______
__________________
___________________________________________________
Faculty Advisor
Date
__________________________________________________
Chairperson of the Department
Date
__________________________________________________
Dean of Engineering
Date
A copy of the thesis is available for research purpose at Falvey Memorial Library.
___________________________________________
Student Signature
Date
Date ____________
iii
THESIS SUBMITTED
Name ___Sean Pearson___________________________________________________
Department _Electrical and Computer Engineering_______________________
Title of Thesis Modeling and Development of Piezoceramic Energy Harvester for
Munitions Applications
Approved by Advisor ______________________________________________________
Name
Signature
Date
Approved by Chairperson __________________________________________________
Name
Signature
Date
Approved by Dean _______________________________________________________
Name
Signature
Date
iv
Table of Contents
• Abstract
• Introduction
• Piezoelectric Theory
o Physics of Piezoelectricity
• Piezoelectric Materials
o Crystalline Materials
o Piezoelectric Ceramics
o Piezoelectric Material Comparison
• Previous Work
• Experimental Test Materials
o Advanced Cerametrics Incorporated
o Omnitek Incorporated
• Resonator System
o Introduction
o Derivation of Mechanical Model
o First Generation Model – Development
o First Generation Model – Initial Testing
o Second Generation Model – Development
o Determination of Damping Constant
o MATLAB Simulink Implementation
o Time-Domain System Conversion
o Generating The Model
o Model Verification
• Piezoelectric System
o Piezoelectric Device Models
o Deriving the Voltage Source Model
o Using the Model
o Model Verification
• Simulink System
o Model Derivation
• PSpice Model
o PSpice Simulations
• Model Usage and Application
o Using the Model
• Experimental Results and Discussion
o Test Procedure
o Results
• Conclusions
• Suggestions for Further Work
• References
• Appendix 1 – CMA-R Type 3 Datasheet
• Appendix 2 – PZT type 5a Datasheet
• Appendix 3 – PZT type 8 Datasheet
• Appendix 4 – Simulink Model
v
01
02
06
06
18
20
20
21
25
30
30
33
35
35
35
37
38
38
39
41
41
42
43
44
45
45
47
48
51
51
56
56
58
58
68
68
73
85
85
87
91
93
94
95
1
Abstract
The electronic missile guidance, communication and sensing system
mounted on a munition round needs to be powered up till the missile is guided
correctly to the target. Presently, chemical batteries are used to provide the
electrical energy to the on-board electronics. However these batteries are bulky
and their operation is unreliable under high-acceleration environments. In
addition, they are prone to leakage when subjected to extended to storage
periods, rendering the armament inert. Alternate sources of energy like Radio
Frequency (RF) power and Piezoelectric power are being proposed for this
purpose. In this project the power is derived by harvesting the energy available
from Piezoelectric sources, instead of relying on the bulky batteries for the
electrical energy. This system does not need any external source of energy to
drive the circuitry and hence is a self-sustained system. This project’s goal is to
examine the properties of piezoelectric materials, and to develop a system that
will allow a designer to use these devices in the energy harvester. The main goal
is to allow simulation of the devices, with the capability to connect circuitry to the
material and evaluate performance. The results of this research will be
presented
2
Introduction and Background
The electronic missile guidance, communication and sensing system
mounted on a munition round needs to be powered up till the missile is guided
correctly to the target. Presently, chemical batteries are used to provide the
electrical energy to the on-board electronics. However these batteries are bulky
and their operation is unreliable under high-acceleration environments. In
addition, they are prone to leakage when subjected to extended to storage
periods, rendering the armament inert. Alternate sources of energy like Radio
Frequency (RF) power and Piezoelectric power are being proposed for this
purpose. In this project the power is derived by harvesting the energy available
from different sources, instead of relying on the bulky batteries for the electrical
energy. Prior to the launch a RF source transmits RF power using a hornantenna. RF power is converted into electrical power by the RF-power harvester
(antenna and subsystem) mounted on the munition and supplies it to the onboard electronics. After the launch, the vibration energy of the munition is
harnessed and a piezoelectric transducer is used to convert the vibrational
energy to electrical energy. Electrical power from this source is used as long as
the munition is accelerating. During flight, the vibrations experienced are also
harnessed, providing more power for the munition. Once the munition reaches
apogee, final calculations for the position, velocity and direction to reach the
target are done and a thermal battery is activated. The power from the thermal
battery is used to fire actuators to adjust the final trajectory. This system does not
need any external source of energy to drive the circuitry and hence is a self-
3
sustained system. This project’s goal is to examine the properties of piezoelectric
materials, and to develop a system that will allow a designer to use these devices
in the energy harvester. The main goal is to allow simulation of the devices, with
the capability to connect circuitry to the material and evaluate performance.
Piezoelectric materials operate as transducers, allowing for energy
transfer between mechanical and electrical energy sources in a predictable
method. These materials can be found naturally, but are also man-made. There
are two main modes of operation for these devices. The first mode of operation,
known as the Direct Piezoelectric Effect, is where a mechanical loading of the
material leads to the creation of an electric field. The second mode of operation,
known as the Converse Piezoelectric Effect, is where the application of an
electric field leads to a mechanical deformation of the material. For an energy
harvester project, the materials will be used in the Direct Effect, with the goal of
converting the mechanical energy of the firing of the round to electrical energy
which can be easily used or stored.
Piezoelectric Materials
There are two main types of material which exhibit piezoelectric
properties, Quartz, and Piezoceramics. Quartz occurs naturally, but can be
expensive to harvest, and has limitations in which ways it may be used.
Piezoceramics are more versatile in their usage and can be shaped to specific
geometries, however they experience some limitations in what environments they
may be used.
4
A good piezoelectric material will exhibit certain properties. It will have a
high piezoelectric constant, which is a measure of the correlation between
mechanical and electrical output. It will show a high electro-mechanical coupling
coefficient. This coefficient measures how efficiently the material transfers
mechanical energy to electrical energy, or vice versa. A good value for the
electro-mechanical coupling coefficient is greater than .65. Finally, the third
measure of a piezoelectric material is the Curie Temperature. This temperature
is the thermal point where the material will loose all of its piezoelectric properties.
If a material has a low Curie Temperature, its thermal operating range will be
very limited.
Simulation Tools
The goal of this research is to develop a design tool for piezoelectric
materials. The first task was to examine the problem. Piezoelectric materials
have two distinct sides, the first being the mechanical side, the second being the
electrical side. Any accurate simulation of the materials would have to
incorporate both sides of the problem. To solve this problem, certain simulation
tools were utilized. The first tool used was MATLAB®, with the Simulink
package. This software was used to simulate the mechanical side of the
piezoelectric material, along with a resonator used in one of the materials.
Simulink also was used to simulate the internal voltage generation of the
piezoelectric material. To complete the electrical simulation of the materials, an
equivalent circuit model was used along with ORCAD PSpice. The output from
MATLAB was imported into PSpice, and the electrical simulations were
5
completed. Together these two software packages give a complete simulator for
a piezoelectric material.
Material Testing
Accurate testing methods were critical to this project. The linearity of the
output in these materials needed to be verified, and test data needed to be
generated to verify the accuracy of the model. Certain difficulties in developing
test methods needed to be developed. The first challenge was in determining
how to excite the materials. Some materials needed to be compressed, while
others needed to be set into oscillation. In addition, all materials needed to be
tested in an environment similar to that of the gun barrel. High-g test methods
that replicated the acceleration curve of a gun firing were also developed.
The materials were tested in various ways, using both high-g impact tests,
and low-g steady state tests. The steady state tests used a variable frequency
shaker table to excite the material, allowing for continuous testing of electronics
such as DC to DC voltage converters. This testing method also allowed peak
power transfer testing of the material to determine the optimal loading. The highg impact tests were used to simulate the high accelerations experience during a
gun firing. This is useful in verifying material survivability and also output at
higher accelerations. To replicate the gun firing acceleration curve more
accurately, a cushion was developed to be used in the high-g test. This cushion
accurately replicates the acceleration curve of the gun-firing, with a lower peak
acceleration amplitude.
6
Piezoelectric Theory
History of Piezoelectricity
Curiosity about the piezoelectric effect dates back thousands of years. It
was first noticed in rocks which would repel other rocks when they were heated.
These rocks, which were actually Tourmaline crystals, eventually found their way
into Europe. Once the crystals arrived in Europe, they were scrutinized by the
scientists of the day. In the mid 1700’s, this effect was given the name of
Pyroelectricity, which means electricity by heat [1]. Further examination of the
Pyroelectric crystals led to the discovery of Piezoelectricity.
Pierre and Jacques Curie were the first to discover the direct piezoelectric
effect. This title means the correlation between input mechanical force and
output electrical energy. They first published their research results on August 2,
1880 [2]. The converse piezoelectric effect, which means mechanical
deformation by application of an electric field, was predicted in 1881 [3]. The first
applications of piezoelectricity were in the area of sonar, where quartz plates
were used to emit high frequency waves, on the order of 50 kHz. These waves
would bounce off an object and return to a receiver, indicating to the operator the
presence of an object below the surface of a body of water. Today, major
applications of piezoelectric materials are in sensors, where their linear response
makes them ideal for making mechanical measurements. Some examples of
piezoelectric sensors are acceleration transducers made by several companies
including PCB Piezotronics and Bruel and Kjaer, amongst others. A growing field
for these devices is in actuators, where piezoelectrics are used to cause a
7
mechanical movement [1]. One such application is the use of piezoelectric
actuators for helicopter rotor control [4]. By flexing a piezoelectric material, the
rotor pitch can be adjusted to allow for control of an aircraft.
Physics of Piezoelectricity
Piezoelectricity means “electricity by pressure”. An electric field is
generated when the material is mechanically deformed. When a piezoelectric
material is strained, it polarizes, creating an electric field. Figure 1 shows how
the polarization of the material occurs. As the material is compressed, the
symmetry of the atomic structure is disrupted, resulting in poles occurring in
atoms of the material. These poles lead to the creation of the electric field. The
converse effect works in much the same way. When an electric field is applied
across the material, it will cause polarization of the material, which in turn will
deform it.
Figure 1 - Atomic distortion of Piezoelectric material [1]
8
Piezoelectric materials can express both an isotropic and anisotropic
characteristic. An isotropic material is one in which the physical properties of the
material, such as the dielectric constant and Electro-Mechanical Coupling
coefficient are uniform, no matter which axis of the material is being examined.
An anisotropic material is one in which the physical properties are not
independent of the physical axis examined. They are isotropic when they are
unloaded, and therefore, their properties are not dependent on which axis of the
material is being examined. When the material is loaded, however, it will exhibit
anisotropic properties. Therefore, it is important in which direction one examines
the material.
The piezoelectric constants are defined as Xab, where X is the constant
symbol, a is the axis where one is examining the electrical properties, and b is
the axis where one is examining the mechanical properties. These are shown in
figure 2. Here, all axes are labeled, and shown are the different linear directions,
1, 2, and 3, and the radial directions, 4, 5, and 6. An example of this axis
nomenclature is K13 , the electro-mechanical coupling coefficient, where the
electrical characteristic is on the X axis, and the mechanical characteristic is on
the Z axis [5]. Therefore, if the material is being mechanically excited on the Z
axis, the electrical output is being measured on the X axis.
Figure 2 – Axis Nomenclature [5]
9
There is one characteristic equation which governs all piezoelectric
devices. It is called the piezoelectric equation, and it is given in equation 1 [5].
This equation relates the compressive force per unit area (pressure) to the
Electric Displacement. This is the basic equation used in analysis of
piezoelectric devices.
Di = d ij ⋅ σ j = d ij ⋅
where:
F
A
(1)
Di = Electric Displacement; dij = Piezoelectric Constant;
σj = Mechanical Stress; F = Force; A = Area
The Curie brothers noticed that the piezoelectric effect is linear, so that the
electric field produced is directly proportional to the stress to which the material is
subjected. These two properties are linked by the piezoelectric strain coefficient.
This same coefficient is used for the converse piezoelectric effect. Figure 3
shows different loading situations of piezoelectric materials, including both the
direct effect and the converse effect. The upper row shows the direct
piezoelectric effect. The light colored box in each drawing shows the original
shape of the material, and the dark box shows the final shape of the material. In
both cases it is seen how the material reacts to the given excitation, either
mechanical or electrical.
10
Figure 3 – Piezoelectric Loading [1]
Figure 4 shows different loading situations for piezoelectric materials.
Additionally, it also shows how these materials can be cut and oriented. Column
A shows plate-shaped elements. The loading is perpendicular to the plane of the
plate. This is referred to as “longitudinal loading”. Column B shows plateshaped elements for the shear effect. Column C shows rod-shaped elements for
the transverse effect. Column D shows elements in the shape of a hollow
cylinder or a truncated cone. Such elements can only be made of piezoelectric
ceramics. They can be polarized either radially for the longitudinal effect or in
axial direction for the shear effect. Column E shows bimorph elements as
bending beams (exploiting the transverse effect). Column F shows torsionsensitive elements (exploiting the shear effect). [1]
11
Figure 4 – Various Piezoelectric Elements and their possible loadings [1]
Piezoelectric materials also exhibit electrical properties, which can be
modeled by equivalent circuits comprising capacitive and resistive elements.
They have a defined capacitance, resistance, and inductance, and therefore
exhibit an electrical resonance, where the electro-mechanical coupling peaks.
These characteristics are directly related to the area and the piezoelectric
modulus e [6]. The equivalent circuit element equations for a piezoelectric
material at electromechanical resonance are shown in equations 2, 3 and 4 for
the resistance, inductance and capacitance, respectively [6]. Equation 6 shows
the natural capacitance of the material, formed by a dielectric material
sandwiched between two metal plates. Figure 5 shows the total equivalent
circuit for the material at resonance.
Rm =
Lm =
ηl
Ae 2
ρ sl 2
2 Ae 2
= K Rη
(2)
= KL ρs
(3)
12
Cm =
Ae 2
1
= KC = KC s
cl
c
C0 =
where:
εA
(4)
(5)
l
c = elastic constant; s = compliance coefficient;
e = piezoelectric stress constant; A = area;
l = height of the material; ps = surface mass density; η = viscosity
Cm
Lm
Rm
Co
Figure 5 – Piezoelectric Material Equivalent Circuit Model
Table 1 shows all of the common piezoelectric constants, with descriptions
of the constant and its units. These constants are used by manufacturers to
characterize their devices. In addition, these constants are used in models
governing the behavior of the piezoelectric devices. Using these models, the
output from piezoelectric devices can be accurately predicted, allowing
simulations to be completed. The most important parameters are the
piezoelectric constant “dij”, the coupling coefficient “kij”, and Young’s modulus
“Yaij”.
13
Piezoelectric
Constant
εr
Table 1 – Piezoelectric Material Constants
Description
Relative Dielectric Constant
• Used in calculating the capacitance of the material
Loss
Tangent
tan δ
• A frequency dependent ratio between the real and
imaginary parts of the impedance of a capacitor.
• A large dielectric constant implies a lot of dielectric
absorption [7]
kij
Coupling Coefficient
• A measure of the coupling between the mechanical
energy converted to electrical charge, and the mechanical
energy input
Di
Electric Displacement
• Dielectric constant times the electric field
dij
Piezoelectric Constant (C/N)
• The piezoelectric charge coefficient is the ratio of electric
charge generated per unit area to an applied force [5]
gij
Piezoelectric Voltage Constant (Vm/N)
• The voltage constant is equal to the open circuit field
developed per unit of applied stress, or as the strain
developed per unit of applied charge density or electric
displacement [8]
eij
Piezoelectric Modulus (C/m2)
• The ratio of strain to applied field, or charge density to
applied mechanical stress [8]
Ni
Frequency Constant (m/s)
• The frequency constant is the product of the resonance
frequency and the linear dimension governing the
resonance. [9]
Qm
Quality Factor
• Measure of how well a system will resonate at or close to
its resonance frequency [6]
Density (kg/m3)
ρ
• Ratio of mass to volume
E
Poisson’s
Ratio
σ
• A measure of how, when a material is stretched in one
direction, it becomes thinner in the other two [6]
saij
Elastic Compliance (m2/N)
• The inverse to Young’s Modulus
• Ratio of mechanical strain to stress [9]
a
Y ij
Young’s Modulus (Pascals)
• Ratio of mechanical stress to strain
*See fig 4 for explanation of “ a ”
14
All strains in the material are constant or mechanical
deformation is blocked in any direction.
All stresses on material are constant or no
external forces.
Electrodes are perpendicular to 3 axes.
Relative dielectric constant ($3s/$0).
Stress or strain is equal in all directions perpendicular to 3 axis
Electrodes are perpendicular to 1 axis.
Relative dielectric constant ($1T/$0).
Stress or strain is in shear from around 2
axis.
Electromechanical coupling factor
Electrodes are perpendicular to 1 axis.
Electromechanical coupling factor.
Applied stress, or piezoelectrically induces
strain is in 3 direction.
Hydrostatic stress or stress is applied equally in all directions.
Electrodes are perpendicular to 3 axis (Ceramics).
Piezoelectric charge coefficient.
Applied stress, or the piezoelectrically induced strain in shear
form around 2 axis.
Electrodes are perpendicular to 3 axis.
Piezoelectric charge coefficient.
Applied stress, or the piezoelectrically
induced strain is in the 1 direction.
Electrodes are perpendicular to 1 axis.
Piezoelectric voltage coefficient.
Compliance is measured with closed circuit.
Electrodes are perpendicular to 3 axis.
Piezoelectric voltage coefficient.
Compliance is measured with open circuit.
Stress or strain is shear around 3 direction.
Strain or stress is in 3 direction
Elastic compliance.
Stress or strain is in 1 direction.
Strain or stress is in 1 direction
Elastic compliance.
Figure 6 – Piezoelectric Symbol Terminology [10]
Figure 7 shows a piezoelectric material loaded compressively through its
thickness. It is assumed that the material is solid and cylindrical, and that it is
being compressed between two rigid masses. Equation 6 shows the stress
component exerted on the material [1]. Using this stress, and assuming the
terminals of the piezoelectric material are short-circuited the electric flux density
can be calculated using equation 7 [1]. Finally, the charge placed on the
terminals can be calculated from equation 8 [1]. All of these calculations are
based on the fundamental piezoelectric equation.
T1 =
F
π ⋅ rK2
(6)
15
D1 = d11 ⋅ T1 =
d11 F
π ⋅ rK2
Q = d11 ⋅ F
where:
(7)
(8)
T1 = Mechanical Stress; F = The force exerted on the material;
rk = the radius of the material; D1 = Electric Displacement;
d11 = Piezoelectric Constant; Q = Charge
Figure 7 – Piezoelectric Material Loaded Longitudinally
Figure 8 shows a piezoelectric material which is loaded compressively
through its length. Again, the same equations apply, although instead of the
material being cylindrical, it is instead a rectangular bar. Equation 9 is used for
the stress component of the material [1]. Equation 10 is used for the flux density,
and equation 11 calculates the charge on the terminals, which are assumed to be
connected to the top and bottom of the material [1]. Again, these equations are a
more specific application of the fundamental piezoelectric equation.
F
a ⋅b
(9)
D1 = d12 ⋅ T2
(10)
T1 =
16
Q = D1bl = d12
bl
l
F = d12 F
ab
a
(11)
T1, T2 = Mechanical Stress; F = The force exerted on the material;
a = Width of the material; b = Height of the material;
D1 = Electric Displacement; d12 = Piezoelectric Constant;
Q = Charge; l = Length of the material
where:
Figure 8 - Piezoelectric Material Loaded Transversely [1]
All of these formulas are summarized by the diagram shown in figure 9.
This diagram shows how the various electrical and mechanical parameters are
related to one another. It is seen how the electric field is derived by the stress T,
or the strain S. From these measurable quantities, it is also seen how all of the
piezoelectric constants, given in Table 1, are interrelated. Using this information,
a piezoelectric material’s behavior can be fully calculated for use under any
situation.
17
Figure 9– Relation of Piezoelectric Constants [11]
18
Piezoelectric Materials
There are two main types of piezoelectric materials, crystalline materials
and ceramic materials. Crystalline materials, such as quartz, occur naturally.
They were found to exhibit piezoelectric properties as long as 100 years ago [1].
Recent advancements have yielded man-made materials that also exhibit
piezoelectric properties [1]. These materials have begun to be used in many
applications, from sensor applications to powering remote electronics in areas
where other power sources are unavailable [1]. Figure 10 shows a
comprehensive list of general piezoelectric material applications.
Figure 10 – Piezoelectric Material Applications [1]
19
An example of such an application is the use of sensors on bridges. For
older bridges, monitoring of modern loads on the bridge has become an
important area of research. For existing structures, having to retrofit the structure
with wiring for a monitoring system is expensive and time-consuming [11]. Using
sensors powered by piezoelectric materials, which transmit their data using a RF
link in a burst at periodic intervals, the real time load and stresses on a bridge
can be determined. This capability enables an easy retrofit, and is a very costeffective way to monitor physical structures. [12]
Figure 11 shows a basic topology of this type of system. The mechanical
vibrational energy of the bridge is harvested, and used to power the onboard
electronics. These electronics include the sensors, an A/D converter, a
microcontroller for data processing, and the necessary RF devices to transmit the
data to a remote receiver.
Figure 11 – Piezoelectric Powered Wireless Sensor Array [12]
20
Crystalline Materials
Crystalline materials were the first materials identified to exhibit
piezoelectric properties. These materials, particularly quartz, are found naturally,
especially in areas of the South Pacific [1]. Since these materials are crystalline,
they are especially sensitive to their cut and orientation, and they exhibit different
piezoelectric properties depending on the crystal orientation [1]
Since the advent of piezoelectric sensors, the demand for quartz crystals
has outstripped the natural supply. Therefore it became necessary to develop
ways to artificially create the crystals. Methods were developed and many
Quartz piezoelectric materials today are grown artificially in autoclaves. It was
found that with a pressure between 1 and 2 kilo Bars and at a temperature of
between 350 to 450 OC, Quartz can be grown [1].
There are, however, problems with artificially creating quartz. One such
problem is the effect of twinning. This occurs when Quartz of two different crystal
orientations intergrow. Twins can also form under loading, affecting the
piezoelectric coefficient. It is best that this occurrence be avoided and must be
considered when designing, or designing with, piezoelectric materials [1].
Piezoelectric Ceramics
Another common group of piezoelectric materials other than quartz is a
ceramic material which has been developed more recently. Piezo-ceramic
materials are man-made, and come in many different types. These materials
exhibit high coupling coefficients, and are very flexible, so they are very suited to
custom applications. Another advantage of ceramic piezoelectric materials is
21
that since they are man made, they do not suffer from the problems which natural
materials have regarding scarcity, and crystal orientation (having to cut the
crystal on a certain geometric plane for optimal output). The ceramic material
studied through the course of this research is lead-zitronite-titanate
(PbZrO3,PbTiO3), commonly referred to as PZT material.
PZT Materials are manufactured by sintering a finely ground power
mixture. The powder is usually made of ferroelectrics of the oxygen-octahedral
type, which are first shaped into the desired shape [1]. Piezoelectric ceramics
are formed of a number of ferroelectric grains (crystallites), each containing
domains in which the electric dipoles are aligned [1]. To properly demonstrate
piezoelectric properties, the material must be polarized by heating the material to
a high temperature and applying a strong electric field [1].
The PZT materials can be manufactured into various subtypes. These
subtypes can be custom-designed for different uses and environments. The subtype materials are created by doping, or introducing impurities into the materials.
By controlling the amount and types of impurities introduced, the physical
properties of the material, such as the dielectric constant, coupling coefficient,
and piezoelectric constant, can be modified to the designer’s needs. The
subtypes are given a standard designation, such as PZT-5A. For the research
conducted at Villanova, the materials examined were PZT-5A and PZT-8 [9].
Piezoelectric Material Comparison
Some general considerations for selecting crystalline or ceramic
piezoelectric materials for certain applications are presented next. Ceramic
22
materials are much cheaper than crystalline materials to use. They do not have
to be grown, nor do they have to be cut properly. They manufactured by several
companies such as Noliac and Advanced Cerametrics amongst others. Natural
crystals can be rare, artificial crystals are difficult to use for applications which
have space requirements, and finding the proper one for a specific application
can be difficult. Finally, the ceramic materials are usually much more sensitive
than the crystalline materials. [1]
Table 2 shows some of the typical piezoelectric constant values for some
common materials. The materials shown, from left to right are Tourmaline, a
type of quartz material, Ceramic Multilayer Actuator – Ring (CMAR), which is a
piezo-ceramic manufactured by Noliac, and PZT type 5a and 8 materials, which
are manufactured by several companies.
23
Table 2 – Common PZT Material Properties
Tourmaline
(Quartz)
Noliac CMAR
PZT 5A
PZT 8
7.5
1325.63
1875
1000
0.003
0.02
0.004
330
370
300
kp
0.568
0.62
0.51
kt
0.471
0.45
0.45
k31
0.327
0.34
0.3
k33
0.684
0.67
0.64
k15
0.553
0.69
0.55
Symbol
Unit
ε3,r
tan δ
TC >
(3X)
ºC
d31
C/N
3.40E-13
-1.28E-10
-1.76E-10
-9.70E-11
d33
C/N
1.83E-12
3.28E-10
4.09E-10
2.25E-10
d15
C/N
3.63E-12
3.27E-10
5.85E-10
3.30E-10
dh
C/N
2.51E-12
7.24E-11
5.80E-11
3.10E-11
g31
V m/N
-1.09E-02
-1.10E-02
-1.09E-02
g33
V m/N
2.80E-02
2.57E-02
2.54E-02
g15
V m/N
3.89E-02
3.82E-02
2.89E-02
Np
m/s
2209.94
2000
2340
Nt
m/s
2038.09
1940
2060
Nc
m/s
1015.41
930
1070
60
7750
1000
7600
Qm,t
ρ
kg/m
3100
372.71
7700
s11E
m2/N
3.85E-12
1.30E-11
1.67E-11
1.15E-11
s12E
s33E
2
m /N
-4.80E-13
-4.35E-12
-5.20E-12
-3.60E-12
2
m /N
6.36E-12
1.96E-11
1.72E-11
1.35E-11
2
8.66E-12
s66
s11D
s12D
s33D
Y11E
Y33E
Y11D
Y33D
3
m /N
3.47E-11
4.37E-11
2.83E-11
2
m /N
1.16E-11
1.50E-11
1.01E-11
2
m /N
-5.74E-12
-7.10E-12
-4.80E-12
2
m /N
1.05E-11
9.40E-12
8.50E-12
GPa
76.93
61
87
GPa
50.92
53
74
GPa
86.16
69
99
GPa
95.61
106
118
There are drawbacks to the ceramic materials. For some PZT materials,
their sensitivity can degrade over time, an effect called “aging”. For applications
24
where consistent and reproducible measurements are necessary over a long
period of time, such as sensors, this is a most undesirable trait [1].
The ceramic materials usually exhibit very high temperature sensitivity,
making their thermal operating range very limited. This makes these materials
unsuitable for more extreme environments, especially high temperature ones. At
high temperatures the piezoelectric properties of these materials such as the
coupling coefficient and the piezoelectric constant change and tend to degrade
as temperature increases. This change becomes complete when the ambient
temperature increases to the Curie temperature of the material [1]. At this point,
the material will lose all of its polarization, losing its piezoelectric properties.
Typical Curie temperatures for PZT materials are on the order of 200 oC.
Finally, ceramic materials as well as certain quartz materials are
pyroelectric, so when being used in sensors, electric noise will increase as their
temperature increases. These materials exhibit a lower resistivity than the quartz
materials, which can be a potential problem for designers. In sensor applications,
a high resistance is needed in applications where the measurand is quasistatic to
ensure a reliable output, making piezoceramic materials unsuitable for certain
applications [1].
25
Previous Work
A number of research groups have examined piezoelectric materials, in
both an academic sense and also in examining them for practical applications.
The main focus of both research attempts has been in the sensor and actuation
areas.
Some work has focused on constructing piezoceramics. These materials
can be custom designed for specific applications, and a group from Japan
headed by Y. Hosono focused on developing piezoceramic materials with high
Curie Temperatures and high piezoelectric constants. They examined a new
piezoceramic material, PbZr03-free relaxor-lead titanate (PT), and compared it to
the classical PZT material. They found that the new material had a much better
electro-mechanical coupling coefficient and a larger piezoelectric constant.
These materials however have a very low Curie temperature which must be
overcome for these materials to become practical. The research team identified
a material (PINMT) which showed a high electro-mechanical coupling coefficient,
piezoelectric constant, and also a high Curie temperature [13].
Eric Prechtl from MIT examined the use of piezoelectric materials for use
in helicopter rotor blades as an actuator. Flexing of the rotor is accomplished by
placing the actuator in the trailing edge of the helicopter rotor. By deflecting the
rotor blade, the pitch of the rotor can be adjusted, which is critical to the control of
the helicopter. The device was built and tested at MIT, and results showed that a
it was possible to achieve a 5 degree rotation at 90 percent of the span on an
operational helicopter [4].
26
Another research group from the National Taiwan University focused their
research on applying piezoelectric materials as a generator for remote sensors.
In certain regions, there is a major need to monitor the health of older bridge
structures. As these structures age, they fatigue, and loose their structural
strength. This is further accelerated by modern loads, such as heavy trucks and
cars, being placed upon the bridge. Current bridge monitoring involves manned
inspections, which are time consuming, and costly, especially on bridges in
remote areas. Their solution to the problem was to harvest the vibrational energy
of the bridge itself using a piezoelectric material. This energy will power
electronics which measure the strain on the bridge, and will also power a RF
transmitter to relay the information to a remote receiver in short bursts. This
solution will provide the necessary data to monitor the load on the bridge, without
the need to continuously send manned teams to check the bridge health [11]
A research group from the University of Brescia in Italy conducted
research on using piezoelectric materials for power harvesting. In a paper titled
“Modeling, fabrication and performance measurements of a piezoelectric energy
converter for power harvesting in autonomous Microsystems”, they presented
their findings. Using PZT piezoceramic materials mounted in a cantilever
position, they attempted to use these materials for remote sensors. They
succeeded in developing models for these devices, and were able to harvest
tenths of a microwatt, which when stored over time was sufficient to power
electronics needed for a RF transmitter [14].
27
A group from Pennsylvania State University, headed by Geffrey Ottman
conducted research on harvesting energy from piezoelectric energy from
piezoelectric materials and using DC to DC converter to perform power transfer
operations and store the energy harvested. Two of the papers were titled
“Adaptive Piezoelectric Energy Harvesting Circuit for Wireless Remote Power
Supply” and “Optimized Piezoelectric Energy Harvesting Circuit Using StepDown Converter in Discontinuous Conduction Mode”, and were presented in the
IEEE Transactions on Power Electronics [15][16]. In these papers, the
researchers used PZT materials, a full bridge rectifier and a DC to DC converter
to harvest the energy from the PZT Materials. They concentrated on looking at
the duty cycle of the converter versus peak power output. They developed
techniques for determining optimal duty cycle, and found that as the mechanical
excitation increases, the optimal duty cycle becomes constant [16].
Another group from the University of Nevada conducted research into
using piezoelectric materials for energy harvesting. This research focused not on
the piezoelectric material itself, but on how the energy is harvested and stored.
They used a rectifier, a storage capacitor, and power conversion circuitry to use
the piezoelectric material as a stable electrical power source. The researchers
further continue to discuss constructing a wireless sensor network with
piezoelectric materials as a possible power source [17].
A group from the University of Missouri – Columbia has done extensive
research into the electrical modeling of piezoelectric materials, and correlating
their excitation to their mechanical output through their physical properties and
28
the compressive force that they are subjected to. The team has written a series
of papers detailing their research, in which they first developed modeling
techniques for the piezoelectric materials themselves, and then used those
techniques to develop various generators for use.
In a paper titled “Electrical Power Generation Characteristics of
Piezoelectric Generator Under Quasi-Static and Dynamic Stress Conditions”,
they presented their results for their model. They examined the material, and
modeled it as a mechanical resonator comprising of a mass, spring and a
damper. Using the conservation of energy, they concluded that the total energy
of the system must comprise the electrical and mechanical energies. Using this,
they modeled the electrical structure of the material itself as an ideal voltage
generator, a capacitance and two resistances. They determined methods to
calculate the component values, and also the internal voltage generation based
on the compressive force exerted on the material and the materials physical
properties. They verified the model using testing of existing materials [18].
Further research this team conducted took the model that they created
previously and extended it to the examination of maximum power transfer in a
piezoelectric pulse generator. In papers titled “Maximum Power Generation in a
Piezoelectric Pulse Generator”, “Energy Conversion and High Power Pulse
Production Using Miniature Piezoelectric Compressors”, “Design, Modeling, and
Implementation of a 30-kW Piezoelectric Pulse Generator”, “Scaling
Relationships and Maximum Peak Power Generation in a Piezoelectric Pulse
Generator”, the research team examined various methods of determining
29
maximum power transfer, and then described some possible applications of the
methods developed [19] [20] [21] [22].
To maximize the power generated, the team connected the material to a
spark gap and an inductor. By varying the thickness to area ratio (TAR), they
were able to maximize energy transfer from the material. The researchers
sought to optimize the product of voltage and current. They found that the
voltage of the material increased linearly with respect to the TAR, however, the
current changed with an exponential trend with regard to the TAR. Thus there is
a clearly defined maximum to the data, and optimal physical dimensions for the
material. Using this information, the researchers continued to design high power
pulse generators. One such generator designed yielded a peak current, peak
power and power density of 58.2 A, 28.4 kW, and 517 kW/cm respectively [22].
For the present research project, the goal is the modeling and simulation
of piezoelectric devices for an energy harvester application. This project
encompasses the research presented here, but extends it in the use of
piezoelectric materials in a munitons environment characterized by a short
operational life and very high accelerations. Testing new materials in this
environment can be prohibitively expensive, and therefore a low cost testing tool
was needed. In addition, this project uses a mechanical mass-spring resonator
to store energy mechanically, and this capability needed to also be modeled.
This previous research was used as a stepping point to begin the examination of
piezoelectric materials in this new environment with the purpose of modeling an
energy harvester.
30
Experimental Test Materials
Initial testing of the piezoelectric devices consisted of tests conducted on
various sample materials supplied to the project. These materials came from
Advanced Cerametrics Incorporated (ACI) [23], and Omnitek [24].
Advanced Cerametrics Incorporated
The materials from ACI were in the form of bare materials, i.e. the
piezoelectric ceramic materials themselves. They came in several varieties, and
several material subtypes. These varieties included the “soft” material, which is
loaded transversely, and also a “hard material”, which is loaded longitudinally.
For this project, the subtypes examined were the PZT 5a and PZT 8.
The materials examined were all ceramic materials, created artificially.
They came in two main types. ACI manufactures the actual piezoelectric fibers.
When these fibers are subjected to mechanical stresses, they generate
electricity. The fiber materials are then embedded into ceramic matrices that
allow them to be custom formed to whatever geometry is necessary.
The first type, referred to as the “hard” material, is a hard piece of material
which generates an electric field when it is compressed. This material is shown
in figure 12. Figure 13 shows a technical drawing of the material, with the
physical dimensions of the material. The term hard does not refer to the
Figure 12 – Hard PZT 5a Material
31
Figure 13 – “Hard” Material Diagram and Loading; Units are in Inches
piezoelectric type, but merely to its physical characteristics. This material is one
in which the piezoelectric fibers are embedded along the vertical axis of the
material, as shown in figure X as the “Z” axis. When the material is compressed,
the fibers are also compressed vertically, causing an electric field to be
generated at the ends of the fibers, or the top and bottom plates of the material.
The second material is referred to as the “soft” material because of its
flexibility. Figure 14 shows a photograph of the soft material. Figure 15 shows a
dimensioned technical drawing of the soft material. Again, the term “soft
material” does not refer to the piezoelectric type, but its physical characteristics.
32
In this material, the piezoelectric strands are oriented along the length of the
material, so that when the material is bent along its “y” axis, as shown in figure
15, the strands are stretched, and placed under tension. This action causes an
electric field to be generated.
The soft materials come in two different varieties, the regular material, and
a bi-morph material. The bi-morph material is one in which two of the regular soft
test materials are placed in a sandwich, with a hard piece of material in between.
The sandwich material is less than .06 inches thick. Essentially the device is two
“soft” materials connected in parallel. The middle material is much harder than
the regular test materials, and since the piezoelectric elements are bonded to it,
a greater strain is placed upon the materials and therefore higher output voltage
is seen from this device.
Figure 14 – Soft PZT Type 5a Material
Figure 15 – “Soft” PZT Loading Diagram; Units are in Inches
33
Omnitek Incorporated
Omnitek is another company which manufactures piezoelectric devices.
However, they have taken a slightly different approach to the problem. Instead of
simply using a bare material, a more complex system was designed with the
hope of harvesting more energy. They designed and constructed a mechanical
resonator that, when subjected to acceleration, will absorb and store the energy
in a mechanical system. As that energy is released, it is absorbed within the
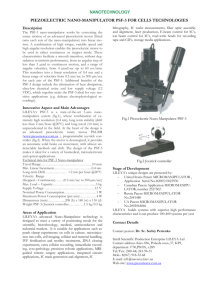
piezoelectric material and thus allows the generation of an AC voltage. A cutthrough schematic diagram of the type 3000 resonator is shown in figure 16.
Figure 16 - Resonator Drawing; Units are in Millimeters
Three types of resonators were examined. First is the type 1000
resonator. In this resonator, the mass is 10 grams, and the spring constant is 2 x
106 N/m. The mass of the resonator is comprised of the mass of the spring,
supplemented by an additional brass mass that has been press fitted into the
bottom of the mass spring material. The type 3000 resonator is very similar to
34
the type 1000 resonator, with the main difference being that the press-fit mass
has been removed. This results in a spring constant of 2 x 106 N/m, and a mass
of 3.75 grams. Finally, the third type of resonator is the type 2000 resonator.
This resonator uses an external spring. The spring constant of this resonator is
0.5 x 106 N/m, and the mass used is 4 grams.
35
Resonator Model
Introduction
Basic control theory was used to develop a model for the mechanical
mass-spring resonator [25]. This allowed the research of the transfer functions
representing mechanical systems and their time-domain counterparts. Using this
information, the mass-spring resonator (MSR) was modeled as a single axis of
motion mechanical system, consisting of a spring, with a mass attached to its
free end. When a force is applied to the mass, the mass spring system starts to
oscillate. The piezoelectric material is placed between the spring and the rigid
attachment. It was assumed that there was no deviation in the physical
dimensions of the piezoelectric material, such as thickness, radius, and Young’s
Modulus. This is not perfectly the case, but since the actual deviations are
minute, on the order of nanometers, this is an appropriate approximation. The
force that is transmitted through the piezoelectric material is then found by
calculating the force exerted through the spring. This is done by taking the
deflection of the spring and multiplying it by the spring constant.
Derivation of Mechanical Model
The first steps taken were to analyze the mechanical system itself. The
system consists of a housing, in which a ring shaped piece of PZT material is
mounted. This material is sandwiched between the housing and the mass spring
unit. The mass spring unit consists of a machined piece of metal which has been
cut in such a way that it works as a spring with a high spring constant, on the
order of 106N/m. This spring has a mass associated with it, on the order of
36
several grams. The combined mass-spring system will oscillate when it is
subjected to an input force. This oscillation will compress the piezoelectric
material and thus the piezoelectric material will generate a voltage. The mass
spring material is shown in figure 17. The equivalent mechanical model for the
system is shown in figure 18.
Figure 17 - Mass -Spring Resonator Material
Figure 18 – Mass-Spring Resonator Diagram
37
Some assumptions were made about the system to make analysis easier.
It was assumed that the system was one dimensional, meaning that it would not
be responsive to any excitations that are exerted upon it outside of its primary
axis. Secondly, the deflection of the piezoelectric material was ignored. Lastly,
the internal damping of the materials was also ignored. It was assumed that the
contribution of this effect is very small, and of little consequence to the overall
performance of the system.
First Generation Model - Development
Primary research into how to approach developing a real-time model for
the resonator concentrated in the area of mechanical system representations.
Using the fact that force is conservative, equations 12 and 13 were written [25].
where:
d 2 x(t )
M
+ Kx(t ) = f (t )
dt 2
(12)
Ms 2 X ( s ) + KX ( s ) = F ( s )
(13)
M – Mass; K - Spring Constant of the resonator;
x(t) - Position of the oscillating spring relative to its static
position; X(s) - Denotes the frequency-domain
representation of the spring position.
From these equations a relationship may be established which relates the
position of the spring to the external force applied to the mass-spring system.
This relationship is called the mass-spring system transfer function, and is critical
because with it, the exact position of the spring can be known in real-time.
Equation 14 shows the transfer function for this mass-spring system [25].
G ( s) =
1
X ( s)
=
2
F ( s ) Ms + K
(14)
38
First Generation Model - Initial Testing
This representation was found to be inadequate when testing was started.
The main discrepancy was in the resonant frequencies. In the lab, one resonant
frequency would be identified through steady state testing, while the model would
predict another. In addition, for the model’s resonant frequency, the oscillations
would grow to impossible amplitudes. It was therefore decided that there was
some internal damping that was not being accounted for. Figure 19 shows the
model response for the un-damped mass-spring system at resonance.
Fig 19 – Undamped Force Simulation at Resonant Frequency
Second Generation Model - Derivation
Once these problems were identified, it was decided that the internal
damping of the spring was not inconsequential, and therefore needed to be
accounted for. To accomplish this, the derivation procedure used previously for
the undamped mass spring resonator was again used. The new equations are
39
shown in equations 15 and 16. The difference between these two equations, and
the equations derived previously is the presence of the fv term, which is the
damping constant [25].
M
d 2 x(t )
dx(t )
+ fv
+ Kx (t ) = f (t )
2
dt
dt
Ms 2 X ( s ) + f v sX ( s ) + KX ( s ) = F ( s )
(15)
(16)
Again the system transfer function needed to be calculated. The only
difference between the undamped and damped transfer function is the presence
of the fv term in the damped function. Shown in equation 17 is the damped
transfer function [25].
G (s) =
X (s)
=
F (s)
Ms
2
1
+ fvs + K
(17)
Another difference is that the input force to the system was changed. It
was realized that since the system is not attached to a fixed object, but rather is
moving itself, that change must be accounted for. Shown in equation 18 is the
input force to the system. “y” is the position of the system in space, and is
calculated by taking the double integral of the acceleration of the system. “x” is
the position of the spring in relation to the system. Therefore, the spring
extension is the difference between “y” and “x”.
F ( s ) = Ky + f v y&
(18)
Determination of the Damping Constant
The next task was to determine the damping constant of the internal
damping of the material. There is one type of sensor which closely resembles
the resonator being examined. This sensor is also a mass-spring mechanical
40
system like the resonator, in which the mechanical damping of the resonator is
calculated. In research material discussing this sensor, a series of formulas
which allow the internal damping to be calculated from the observed resonance
frequency are provided [1]. This data was implemented into the model and the
resonator system.
ω
ωd =
k
m
=
(
(19)
s
)
(
k
1 − ϑ 2 = ω0 1 − ϑ 2
ms
ϑ
where:
0
=
)
α
2 m
(21)
s
ϑ = fading constant
⎛ d 2x ⎞
⎛ dx ⎞
ms ⎜⎜ 2 ⎟⎟ + α ⎜ ⎟ + kx = F (t )
⎝ dt ⎠
⎝ dt ⎠
where:
(20)
ms - mass; α - damping constant; k - spring constant
Fig 20 – Damped Force Simulation at Resonant Frequency
(22)
41
MATLAB/Simulink Implementation
Time-Domain System Conversion
With the transfer function created, it is now possible to relate the force
input to the extension of the spring. The problem arose however of the fact that
the transfer function is implemented in the frequency domain, and all simulations
were to be completed in the time domain as the input acceleration data is based
in the time domain. This made it necessary to convert the transfer function to the
time domain using the inverse Laplace transform.
The process of converting the transfer function is shown is the series of
equations below. First, the transfer function is rewritten, as shown in eq 23.
Then the inverse Laplace transform is taken, as shown in eq 24. Next the state
variables are chosen. These variables are the representations of the differential
equation of varying orders. These equations are shown in eq 25. Next, the state
and output equations are calculated. This is done by using the state variables,
and differentiating both sides of the equation. This is shown in eq 26. Finally,
x(t) is calculated from eq 27 [25].
(s 2 +
fv
K
1
s + ) X (s) =
F (S )
M
M
M
&x& +
fv
K
1
x& +
x=
f
M
M
M
x 1 = &x&
x 2 = x&
(23)
(24)
(25)
42
x&1 = x2
K
x1
M
fv
x2
M
1
f
M
(26)
f
M
1
( &x& + v x& −
f (t )) = x(t )
K
M
M
(27)
x& 2 = −
−
+
x = x1
−
where:
M – Mass; K – Spring Constant; fv – Damping Constant;
f(t) – Input Force
Generating the Model
The mass-spring-damper system was integrated as a whole to complete
the system level model. Since the input data to be used in simulations is the
measured acceleration data, and the models all work on force data, this input
had to be converted to a force. The input acceleration is first converted to
position data by integrating it twice. The position data is then multiplied by the
spring constant. The damping constant is then multiplied by the velocity data,
and then these two values are summed together to calculate the input force.
Using state equations, the equations of motion were calculated for the
system. Using the frequency-based equations of motion, which represent how
the mass will move continuously for any input force, it is easy to calculate the
force impingent on the piezoelectric material by multiplying the spring constant by
the spring deflection. The spring deflection is calculated from the difference
between the position of the system during flight (y) and the position of the end of
the spring during flight (x).
43
1
fin
2
m
Fin/m
1
s
1
s
Integrator
Integrator1
1
unlimited spring output
2
3
Fv/M
fv/m
K/M
k/m
vx
4
Figure 21 – Time Domain Mechanical System Representation
Model Verification
Using the damping equations as mentioned earlier, the mass-springresonator system was tested to ensure that it was working properly. A step input
acceleration was used as the system input acceleration. The peak of this
acceleration was 30,000 g’s. This was done because information from Omnitek
stated that for this acceleration, the type 3000 resonator would have a deflection
of .5 mm. This was verified as the simulator produced a deflection of .55 mm,
and thus confirmed that the resonator model was indeed working properly. The
output for the tests is shown in figure 22.
Fig 22 – Model verification based on resonator specifications
44
Piezoelectric Device Models
The device models for the piezoelectric materials are simple electrical
equivalent circuits consisting of a voltage source connected in series with a
capacitance and a loss resistance.
The value of the voltage source in the equivalent circuit model is directly
related to two things, the area of the piezoelectric material and the compressive
force applied to the material. This information, along with the physical properties
of the material allows the material’s output voltage to be predicted. The
capacitance is calculated from the relative dielectric constant of the piezoelectric
material, and the height and area of the material. The loss resistance represents
the losses from the current traveling across the surfaces of the material to the
electrical leads. The leakage resistance represents the losses as current travels
through the material. As a rule, the loss resistance is relatively small, on the
order of tens of ohms, and the leakage resistance is high, on the order of
megaohms, depending on the thickness of the material.
The loss resistance of the material is the resistance seen as current
moves out of the material. It is defined by the loss tangent of the piezoelectric
material, the operating frequency and the capacitance of the material [18].
Rloss =
C stack =
tan(∂ )
ωC stack
ε oε r A
h piezo
(28)
(29)
45
The electrical model for the material is shown in figure 23. Rleakage is
measured experimentally, and Rloss and Cstack are calculated as above. Va is
calculated, and the formula is derived later in this paper.
Figure 23 - Electrical Model for Piezo Material [18]
Deriving the Voltage Source Model
Following Keawboonchuay and Engel a mechanical model for the
piezoelectric material, based on a mass-spring-damper system representation,
as shown in fig 24 was derived [18]. The mechanical system of equations were
written for this system. These are shown in equation 30.
m piezo &x&piezo + c piezo x& piezo + k piezo x piezo = F
(30)
In this equation, mpiezo is the mass of the piezoelectric material, cpiezo is the
internal damping of the piezoelectric material, and kpiezo is the spring constant of
the piezoelectric material [18].
46
Figure 24 - Mechanical Representation of the Piezo Material [18]
For any given compression, the mechanical energy stored in the system is
shown in equation 31. By relating Young’s modulus to the spring constant of the
system, it is possible to rewrite the stored mechanical energy of the system in
terms of the piezoelectric constants. This is shown in equation 32 [18].
Wmech = Fx piezo
Wmech
2
1 F h piezo
=
2 YA
(31)
(32)
The next step is to evaluate the electrical energy generated in the
material. This is shown in equation 33. By equating the mechanical energy to
the electrical energy, and solving, it is possible to calculate the internal voltage
generation. This is shown in equation 34 [18].
47
Welec =
Va =
1 q2
2 C stack
k 33 Fh piezo
A
(.5Yε o ε r ) −1 / 2
(33)
(34)
Using the Model
The piezoelectric system model takes the input compressive force
generated by the mechanical resonator model and static input data, such as the
material’s physical properties and electrical properties, and uses the information
to compute the voltage waveform. This block uses the electrical model to
calculate the voltage generated by the piezoelectric material. This electrical
model uses material properties and impingent forces to convert the mechanical
energy to electrical energy.
For simplicity, and because this is a two part model (mechanical and
electrical components), only the voltage generation characteristics of the material
are accounted for in Matlab/Simulink, not the internal losses inherent to the
piezoelectric material. It was decided that these losses would be accounted for
when the design work was completed in PSpice. This decision was also made
because any coupling issues between the generator and the load can also be
simulated in PSpice, making the simulation more accurate.
The model was created using MATLAB with Simulink. To use the model,
the user must first have one set of data, the input acceleration data as a function
of time. If a comparison to an existing set of test data is to be completed, an
output voltage data set as a function o time is also necessary. Figure 25 shows
the complete piezoelectric model as implemented in Matlab/Simulink.
48
In1
.69
In2
k33
In3
8.43e10
youngsmod
In4
Out1
In5
Vout
.002
In6
Product1 del\R3output_dr
hpiezo (m)
Vout
In7
1800
er
ln8
In9
0
Piezo System
Lpiezo (m)
0
Wpiezo
L
W
Or
.006
Ir
fcn
0
C
er
Outer Radius (m)
Cp (Farads)
h
Piezo Capacitance
.002
Inner Radius (m)
.003
Loss Tangent
lt
c
fcn
0
Rl
f
Rloss (ohms)
Loss Resistance
1200
rloss
Operating Frequency
fcn V0ratio
0
rleakage
L
Or
Ir
.45
Conductivity
Voltage Divider
Ratio Output
Voltage Divider
Ratio
W
fcn
0
R
p
Rleakage (ohms)
h
Leakage Resistance
Figure 25 – Electrical System
Model Verification
The final task in the development of the model was to verify its operation.
Using the information and test data taken by the researchers who developed the
piezoelectric electrical model, the Simulink model was tested [18]. First, an input
force was created as a pulse. This pulse was fed into the model, and using
material properties given, the output was generated. This output is shown in
49
figure 26. The output from the model was compared to that given in the research
paper, shown in figure 27 [18].
Figure 26 – MATLAB Test Data
Figure 27 – Measured Test Data [18]
50
The Simulink simulation showed a peak output voltage of 88 volts. This is
the output from the internal voltage source, and therefore does not account for
internal losses. The stimulus for this test was a pulse representing a
compressive force of 500 Newtons, the same peak force measured in the
reference data [18]. The reference data showed a measured peak output of
approximately 70 volts for the same input force. The data in the research paper,
however, takes into account internal losses.
In comparison, there was a difference between the reference data, and
the data generated by the model developed. This difference was attributed to the
difference in accounting of losses between the two data sets. With this
difference in mind, it is determined that the model is working.
51
Model Derivation
The overall system model was generated by integrating the mechanical
model and the electrical model. As these two models were developed
separately, they needed to be interconnected and tested to verify their operation.
The two individual models were placed into the same Simulink workspace, and
then interconnected, as shown in figure 28. Then the testing of the total
simulator commenced.
X(t)
Xt
F(t)
A(t) g's
Fin
A(t)
F(t) Piezo
Length Limit
Fin
Position
M
K
fv
y
Force
vy
tor input data\R
-9.8
Subtract
a
f in
k
y
Gain
fv
0
Step
f_piezo
1
vy
FPiezo
Coupling Factor
Resonator System
Y System
.699
k33
k31
Data Mean
0
162.9
Lpiezo (m)
m
fcnf 0
k
f0
0
Wpiezo
1250
.006
fd
fv
fcn
ms
k
Embedded
MATLAB Function1
Observed Resonant Frequency (Hz)
Outer Radius (m)
.00375
.002
M resonator (Kg)
hpiezo
hpiezo (m)
3676
f0 (Hz)
fv
Vout
.000067
L
W
Or
Ir
fcnVstack
or output data\R
A
fcn
Vout
A
Area Calc
43.10e9
y oungsmod
Vout_ref
er
Y33
Force to Voltage conversion
Inner Radius (m)
1050
2e6
er3
A
K resonator (N/m)
Created:
Thu Apr 14 15:23:25 2005
Model Version: 2.224
Last Modified: 05-Feb-2006 23:01:22
T his model is designed to simulate the Omnitech Piezoelectric resonator
-Developed by: Sean Pearson
-Input acceleration should be in meters per second squared
-If acceleration is in g's, adjust the gain on the input to 9.8, if m/s^2, make it 1
-if output is of wrong polarity, input acceleration may be inverted using
gain stage to correct problem
0.0001005
er
A (m^2)
h
fcn
1.394e-008
C
.5e-3
Spring Extension Limit (m)
Cp (Farads)
Piezo Capacitance
.003
Loss Tangent
lt
c
fcn
27.4
Rl
f
Rloss (ohms)
Loss Resistance
l
a
10e10
Resistivity
fcn
6.665e+010
R
p
RLeakage(ohms)
Leakage Resistance
Figure 28 – Complete System Model
Data was taken from the resonator, comprising of the voltage vs, time
measurements. This data was taken with the resonator open-circuited. Then all
of the relevant parameters were input into the model. These parameters are
items such as the mass and spring constant of the resonator, the physical
dimensions of the material, and the actual material properties such as the
52
coupling coefficient, dielectric constant and Young’s modulus. Simulations were
run, and the voltage output was generated.
Once the system was integrated, several small problems appeared which
needed to be solved. Once of these problems was an order of magnitude
difference between the output of the model and that which had been measured in
the lab. The difference between the measured output and the simulated output is
shown in figure 29.
Figure 29 – Incorrect Simulator Output
After extensive research, it was found that this error stems from the
internal construction of the Noliac CMAR3 material. Shown in figure 30 is a cut
away drawing of the material. The material is not uniform throughout its vertical
axis, but rather is constructed of layered thin piezoelectric materials. After
53
communicating with the engineers at Noliac, it was found that these materials are
made of 24 thin piezoelectric rings, each being 67 microns thick. The rest of the
space in the material is filled with inactive material.
Figure 30 - Noliac CMAR Material Cutaway Drawing
These changes were implemented into the model by changing the height
of the material from 2 cm, to 67 microns. The rest of the constants, such as k33
and Young’s modulus were assumed to still be constant throughout the material.
The results from the new simulation are shown in figure 31. The simulated
results are the dashed line, and the measured are the solid line. The peak
voltages do not match up exactly, but they are very close with one another. The
expected voltage is 0.69 volts, and the model is producing a peak of .55 volts.
This is an overall root mean square error of approximately 2.91%. To
compensate for this small difference, a correction factor was placed in between
54
the mechanical and electrical stages. This is a linear adjustment, and is
approximately 1.255 for the type 3000 resonator tested. Using the correction
factor, the output can be artificially corrected so that further simulations and
extrapolations are accurate.
0.6
0.5
0.4
0.3
0.2
0.1
0
-0.1
0.33
0.331
0.332
0.333
0.334
0.335
0.336
0.337
0.338
0.339
Figure 31 – MATLAB Simulink Output, Type 3000 Resonator
Another resonator was tested, a type 2000, and the results were similar.
The measured peak voltage was 1.005 volts, and the simulated peak voltage
was 0.61. The root mean squared error is 3.62%, and the correction factor is
1.64.
1
0.8
0.6
0.4
0.2
0
0.315
0.32
0.325
0.33
0.335
0.34
0.345
0.35
0.355
0.36
Figure 32 – MATLAB Simulink Output, Type 2000 Resonator
55
The correction factors were designed to compensate for a small difference
between the measured material voltage output and that produced by the
simulator. It was seen that the model was very sensitive to the physical
constants of the material. For example, a 20 percent increase in the thickness of
piezoceramic to 80 microns for a type 3000 resonator yielded an almost perfect
match at the peak voltage point, however the overall root mean squared error
was 3.13%. A 6 percent increase in the type 3000 resonator mass to 4 grams
yielded similar results, with an overall root mean square error of 2.97%. It was
therefore decided that the inaccuracies noted were due to these effects.
Final verification of the accuracy of the model came in the form of the
internal circuit parameters calculated by the Simulink model. The Simulink model
calculated the internal capacitance of the material to be 12.12 nF. The datasheet
for CMAR3 states that the capacitance of the material is 350 nF + 15%. This
gives a capacitance range of 298 nF to 402 nF. If 24 of these thin piezoelectric
rings are connected in parallel, the capacitances will sum to form the total
capacitance. To calculate this, the internal capacitance of a single plate needs to
be multiplied by 24. Therefore, the total capacitance of the material is 290.88 nF.
This is close to the range specified by the material datasheets. Using the
nominal value of 350pF, the percent error is approximately 17%. Using the
closest value in the range, 298pF, the percent error is 2.68%.
56
PSpice Simulations
Another issue with the Simulink model is that the voltage generator
implemented in Simulink does not simulate the open circuit voltage of a material,
it simulates the internal voltage generator, shown in figure 33 as V4. It is
therefore necessary to develop a model that can simulate the terminal voltage of
the material, and, better yet, be able to accommodate any additional circuitry. To
accomplish this, PSpice was examined as a possible alternative.
The first task was to find a way to get the voltage output from Simulink into
PSpice. This was accomplished using the VPWL_File voltage source. This
source will take a comma separated value (*.csv) file and import the data into
PSpice. Adding the capability for the Simulink model to calculate the loss
resistance R_Loss (see figure 33) and material capacitance C_Stack (see figure
X) completes the PSpice model for the material. With all of this done, PSpice
could be used to determine the terminal voltage for the device.
Figure 33 – PSpice Piezoelectric Material Model
57
Once the material model was implemented, simulation could begin. The
user must set the time length of the simulation. This length can be either shorter,
the same length, or longer than the input data. If the simulation length is longer,
PSpice will make the voltage source equal to 0 after the input data ends. The
length of the input data can be found from the time length of the MATLAB®
simulation, or it can be seen in the last data value for the input data set.
The user can then add any type of circuit elements that they choose.
Common components are a full bridge rectifier, utilizing low turn-on voltage
germanium diodes or silicon Schottky diodes, a filter capacitor, and then a load.
Another type of loading is to use a DC to DC converter on the output of the
device. This will allow the high output voltage of the piezoelectric material to be
chopped and then rectified and used as a stable value with good source current
capabilities.
58
Using the Model
All data necessary to use this model must be input using “.mat“ files.
These are the files that MATLAB® uses to store the data it generates. In the lab
at Villanova, all of this data was collected using the Agilent® 54622D oscilloscope
with the GPIB interface. This data collection system allows the data collected by
the oscilloscope to be interfaced with Microsoft® Excel©. The data collection tool
is shown in figure 34. An Excel© file has been created to accept this input data.
The file is labeled template.xls. There is one place to input the raw data, and the
spreadsheet takes care of the remaining calculations. The spreadsheet
automatically calculates the converts the acceleration data from volts to
meters/second2 and calculates the peak input acceleration.
Figure 34 – Data Retrieval Tool
59
When the data is placed into the spreadsheet, the user must enter two
pieces of additional information. The first is on the first sheet, titled “Acceleration
Data”. Cell F5 contains the parameter which relates the voltage data to the
acceleration units. This data comes from the collection device, which in the tests
that we conducted was the Bruel & Kjaer Charge Amplifier Type 2635. Normal
values for this parameter were 1 mV / (m/s2). The second piece of information
needs to be entered on the worksheet titled “Voltage Data” and this is the load
placed on the resonator. This data is used to determine the power output. The
maximum power transfer load was previously determined by the load impedance
tests. When this is all done, the file should be saved with an appropriate file
name. The template sheet is shown in figure 35.
Figure 35 – Microsoft Excel Data Collection Sheet
60
With this information now in place, all the data is correctly formatted, and
the conversion to mat files can now occur. The next step is to locate the file
called “inputtemplate.xls”. This sheet is shown in figure 36. This file is located in
the same folder as the model files. With this file open, three sets of information
need to be copied into it, overwriting the existing data. Column A is the time data
measured, in seconds. Column B is the acceleration data, in either units of
m/s^2 or g’s, and finally column C is the voltage data, in volts. When pasting the
data into the file, use the paste special command and only paste the values, not
the formulas. This file should then be saved under the same file name. In cell
E4 of this file is a MATLAB command line, this should be first edited so that it has
the appropriate file and directory name of where the inputtemplate.xls file is
located, and then the command should be copied into MATLAB.
Figure 36 – MATLAB® Data Input Sheet
61
When the command is entered into MATLAB, it will be executed
immediately. Two new files will appear in the workspace after execution. The
MATLAB user window is shown in figure 37 after data load. One will be called
input, and the other output. These files will be automatically saved to the
directory outlined in the command as input.mat and output.mat. Appropriate file
names are selected, and the files are renamed. The file naming format is
month.day.year_test number_material type_material number_input or output_accelerations units_terminal load.mat.
Now open up the file titled “sysmod_v4.mdl” is opened. Simulink will start and
open the file.
Figure 37 – MATLAB Window after Data Load
Before executing the simulation, several modifications must be made to
the Simulink file. The first is to modify the input path. This is the leftmost box in
the model. Double click on the box, and edit the file name and path to the
appropriate one for the input file being used. The input box window is shown in
62
figure 38. In addition, the sample time for the input data needs to be adjusted to
fit the data which is being used. If the sample time is unknown, input -1. The
same must be done then for the output file. Locate the output file box on the
right hand top part of the screen, again double click. Perform the same action as
before, although modify the output filename this time. The output dialog box is
shown in figure 39.
Figure 38 – Input File Window
Figure 39 – Output File Window
63
The simulation configuration parameters must also be adjusted. This is
located in the toolbar section of the program, in the center of the screen. The
configuration box is shown in figure 40. Default units are seconds, and the user
simply needs to enter the time length of their data into this spot. The user must
also choose the type of solver that they wish to use. A fixed time solver is
necessary since the PSpice is unable to accurately recognize the data produced
by the variable time solvers. The final adjustment is the type of input
acceleration units used. The input units to the model must be meters per second
squared. If the measurement units are in g’s, the gain parameter in the model
must be 9.8 to convert to meters per second squared. If the measurement units
are already in meters per second squared, then the gain parameter should be 1.
With these operations performed, the simulation is ready to commence.
64
Figure 40 – Simulink Configuration Screen
The output from the simulation comes in two forms, graphs and data sent
to the workspace. The main output form is the output graphs, and an example of
these is shown in figure 41. These compare the voltage data measured to the
data produced from the model. From this data, the user can easily ascertain how
accurate the model is and what changes need to be made to improve this
accuracy.
65
Figure 41 – Output Data Graph
The simulation results must first be taken from Simulink, and imported into
PSpice. This is completed by using Microsoft Excel as an intermediary. To do
this, the user needs to execute the following command;
output = tout; output(:,2) = Vout;
csvwrite('h:\research\model\pspice\input_data\input.csv',output);
This command will copy the “Tout” workspace file from MATLAB® into the first
column in Excel. Next, it will copy the “Vout” workspace file into Excel, placing
the data into the second column. With this completed, the command will save
the file using the “csvwrite” command. This is necessary since PSpice will not
66
recognize the .mat files that MATLAB® uses, nor will it recognize a ".xls" file that
excel uses. It will, however recognize the ".csv" file. The user should then locate
the file just created and rename it using the same naming convention used for
the “.mat” files previously. The MATLAB® user window after simulation is shown
in figure 42.
Figure 42 – Matlab Window After Simulation
With these steps completed, the next step is to open up PSpice. Look for
the file titled “PIEZO”, it should be in the PSpice subdirectory of the MATLAB®
model file. When this is open, navigate to the schematic page, and examine it,
there should be at a minimum four components on the page, the piezoelectric
capacitor, the loss and leakage resistors, and the piezoelectric voltage source.
The first step is to check the voltage source. Check the file name to make sure
67
that it is pointing to the “.csv” file that was just created. If this information is
correct, the user must then change the component values to those provided by
the MATLAB® Simulink simulation, so that the model parameters for the
piezoelectric material are correct. The PSpice window is shown in figure 43,
ready for simulation.
Figure 43 – PSpice Window
68
Experimental Setup
The drop test was used to provide very high impact accelerations, greater
than 15,000 g’s. The drop platform itself is approximately 2 meters tall, and is
constructed of two steel plates, one which acts as the base plate, and one which
acts as the drop plate. From the base plate, two polished metal pipes extend,
and are held in parallel by a wooden clamp at the top. The second steel plate
rides on these pipes using two ball bearing sleeves.
The impact force can be applied through a cushion, which is designed to
extend the force of the impact to better resemble the acceleration curve
experienced in the gun environment. To do this, some of the acceleration
amplitude must be sacrificed, but since piezoelectric device behavior is linear
with force, it is easy to extrapolate the laboratory output to that of the gun
environment. The cushion is positioned between the base plate and the drop
plate. If the test material must also be placed between the base plate and the
drop plate, the cushion is placed on top of the material. Figure 44 shows the
drop platform.
69
Figure 44 – Drop Test Setup
The cushion is made of rubber, layered, and held together with electrical
tape.
Many materials such as wood, foam, and wax were examined to be used
as cushions. These materials were found to dampen the acceleration to a point
where it became useless. The rubber material acted more like a spring, storing
and real easing the energy of the drop, effectively reproducing the acceleration
curve.
Figure 45 shows the accelerometers mounted on the drop platform. When
drop testing a resonator, the optimal method to excite the device is to apply
acceleration to it. This action will set the resonator into oscillation, thus
producing a voltage output. This is easy to do by simply mounting the resonator
to the top of the drop plate. When dropping it, the impact of the plate will provide
an acceleration to excite the resonator. This will set the resonator oscillating,
70
and thus generate a voltage output. Table 3 shows the channel assignment for
the data recorder.
Figure 45 – Drop Platform Mounting with Resonators
71
Table 3 - Test Connection Chart
Channel
Measurement
1
Acceleration (.945 mV/g)
2
Resonator 1
3
Resonator 2
4
Resonator 3
5
Resonator 4 (center, un-limited resonator)
6
Resonator 5
7
Resonator 6
9
Resonator 7
The tests were all conducted with the material terminals open-circuited.
Probes were attached and all data was recorded. The tests were conducted
using the Nicolet Vision data retrieval system, along with PCB Piezotronics
480E09 and 480E10 signal conditioners. The accelerometer was PCB
Piezotronics 350B04 shock accelerometer. The accelerometer is shown in figure
46. The data retrieval system is shown in figure 47.
72
Figure 46 – Accelerometer and Charge Amplifier
Figure 47 – Nicolet Data Recorder
73
Results
Below are some test results that were taken on July 21, 2005 at Picatinny
Arsenal. Two series of 5 drops were conducted, one for each signal conditioner,
and then two additional drops were completed using the 480E09 signal
conditioner along with the drop cushion. A total of 8 channels were used on the
Nicolet, channels 1-7 and 9 (channel 8 would not couple correctly). A sampling
rate of 100,000 samples/second was used. The data retrieval system is shown
in figure 47. Operation of the system is very similar to that of a personal
computer, and the retrieval system is actually based on a Windows 98 core.
Figure 48 shows a sample of the data recorded from the materials.
Shown in figure 48 are the results for a type 3000 resonator after it had had been
run through the Simulink model. Figure 49 shows the results from the PSpice
simulation of the model data. The experimental data was taken using the test
setup above, with the rubber cushion in place. This data is for the R3 resonator,
and was taken on the third test drop. The piezoelectric material was opencircuited. The maximum sampling rate of 100,000 samples per second was
used.
74
Figure 48 – Type 3000 Resonator Matlab simulation Output
Figure 49 – Type 3000 Resonator PSpice Output
75
Tests were also completed for one of the type 2000 resonators tested. Figure 50
shows the Matlab comparison between the measured data and the simulated
data. The peak for the measured data was approximately 1 volt, and the peak
for the simulated data was .61 volts. To correct the simulator output for this
difference, the correction factor used was 1.66. Using the corrected data, the
PSpice output is shown in figure 51. The peak for the corrected output is 1 volt,
matching the measured data. The experimental data was taken using the test
setup above, with the rubber cushion in place. This data is for the R5 resonator,
and was taken on the third test drop. The piezoelectric material was opencircuited. The maximum sampling rate of 100,000 samples per second was
used.
76
Figure 50 – Type 2000 Resonator Matlab simulation Output
Figure 51 – Type 2000 Resonator PSpice Output
77
Figure X shows the results completed for one of the hard drop tests. In
this test, the rubber drop cushion was removed, and the impact was metal
against metal. This produces a much higher impact acceleration, but with much
higher frequency oscillation. Figure 52 shows the results for the hard drop test.
The red is the measured vales, and the yellow is the simulated results. The
peaks occur at very similar magnitudes, although the graphs do not bear a lot of
resemblance. The sampling rate for these tests was 100,000 samples/second.
Looking at figure 52, something of note are the sharp peaks of the purple plot.
The signal does really have such sharp transitions, but this is due to an under
sampling of the data. This under sampling is then translated into the model data
through the acceleration data, which experiences the same effect. This will
therefore distort the output from the model, making the test results less accurate.
Figure 53 shows the PSpice output from the simulations.
78
Figure 52 – Hard Drop Test
Figure 53 – PSpice Output
79
The next simulations completed were to see what the results were if the
material were subjected to the firing acceleration. Figure 54 shows the
acceleration that was used to excite the resonator. To generate the acceleration
data, a graph of the firing acceleration for a 155mm gun was sampled and input
into Microsoft Excel. Then a fifth order polynomial was fit to the data. The
equation for the polynomial was then used to generate a new data set, with a
higher data sampling rate, allowing for more accurate simulation.
A new Simulink simulation profile was created to allow for the simulation of
the device in the gun environment. In this profile, the ability to compare the
model data with the measured data was removed. This was done because there
is no measured data, since the user is simulating device response in an unknown
environment. The new simulation file is called “sysmod_simulator”. The PSpice
output for this simulation is shown in figure 55.
80
Figure 54 – MATLAB Simulink Output
Figure 55 – PSpice Output
81
The final test was to complete a new design. The goal was to charge a 47
μFarad capacitor to a voltage of 6.00 Volts. At this voltage, the energy stored in
the capacitor will be 846 mJoules. To complete this design, the mass and spring
constant of the resonator, the outer radius of the piezoelectric material, and the
electrical circuitry connected to the material were able to be modified. The
change was to increase the mass of the resonator in order to induce a higher
compressive force on the material. With this completed, the spring constant was
increased to keep the spring extension to a reasonable length, around .5 mm.
The outer radius of the material was extended to allow the material to source a
higher current. Simulations were completed, and two things were noted. The
spring extension of the resonator peaked at .58mm, only slightly longer than the
requirements set forth in the specifications for the existing resonators, and the
output voltage was much higher, around 70 volts. Figure 56 shows the
acceleration of the resonator. Figure 57 shows the extension of the resonator
spring. Figure 58 shows the output voltage of the resonator.
Figure 56 - Resonator Acceleration
82
Figure 57 - Resonator Spring Extension
Figure 58 - Output Voltage
The final spring parameters were a mass of 100 grams and a spring
constant of 2*107 N/m. The new outside radius of the piezoelectric ring material
was 14mm, with an inner radius of 2 mm. The thickness and construction was
kept identical to that of the noliac piezoceramic material. This is 24 stacked
layers of 67μmeter piezoceramic material. With this construction, the resonator
83
had an output of 70 volts at an acceleration of 116.3 m/s2. This is 11.86 kg’s.
Using this data PSpice was used to create a design to best harness this energy.
Because of the high voltages produced by the Piezoceramic material, a
transformer was used to step down the AC voltage to something that can be
used practically. The added effect of this is that it steps up the charging current
to allow the capacitor to charge quicker. The turns ratio of the transformer was
found experimentally to be approximately 7.07. Using a full bridge rectifier to
rectify the AC voltage, and a 47 μFarad capacitor to store the energy, a circuit
was constructed, shown in figure 59.
R_Loss
500mH
TX1
7.293
Vin
D9
10mH
D1N4001
D1N4001
w:\Research\Model\PSPICE\input_data\input.csv
R_Leakage
D12
D10
4620000
C2
C1
1.7u
V
D1N4001
47u
Riso
D11
100000k
D1N4001
R3
1k
0
Figure 59 - PSpice Circuit
During simulations, a 47 μFarad capacitor was charged to a peak voltage
of 7.25 volts, shown in figure 60. At this voltage, the stored energy is 1.235
mJoules. In addition, a 1 kiloohm resistor was placed in parallel with the
capacitor to discharge it. The peak current through this resistor is 7.25 mA,
shown in figure 61. The peak power dissipated through the resistor is 53 mW,
shown in figure 62. This design meets all the criteria laid out for the design, and
since the peak acceleration is lower than that seen in the actual munition firings,
higher currents, voltages and powers are likely to be seen.
84
Figure 60 - Capacitor Voltage
Figure 61 - Resistor Current
Figure 62 - Resistor Power Dissipation
85
Conclusions
In conclusion, this project has reached its goals of examining Piezoelectric
materials, characterizing them, validating the mathematical equations for them,
and then developing a real-time model for the materials. The work completed in
the independent study involving the characterization and testing of piezoelectric
devices was extended into the research demonstrated in this report.
The development of the model realizes the goal of determining a
technique for optimizing the materials, and also developing the ability to simulate
them in a circuit simulator such as PSpice. This model is comprehensive,
allowing the simulation of the materials of both the mechanical and electrical
components of the piezoelectric material. In addition, it allows the future
development of electrical energy conversion components in a low cost simulation
environment.
Suggestions for Further Work
Further work on this project would concentrate on the development and
streamlining of the modeling tool, and utilizing the model to design a better
resonator, with an emphasis on optimizing the power output.
Currently the modeling tool is rather complicated to use, with many steps
involved, and many areas for user error. Streamlining and automating the
process would greatly improve the model and make it much easier for the user to
use. It would allow for faster simulations, which would improve the effectiveness
of the model.
86
Another area for further work would involve better evaluation of the
piezoelectric materials, and more development of the electrical model used.
Better determination of the material properties such as young’s modulus and the
dielectric constant would yield a much more accurate simulation.
An advantage of the model is that it quickly correlates the mechanical
input to the electrical output in real time. Using this information, one can take
data measured for a specific environment, and determine the optimal resonator
parameters for that environment. Then they can find the optimal piezoelectric
material and optimize its physical characteristics. Developing the techniques for
this would be a great area of improvement and future work.
87
REFERENCES
[1]
Gautschi, Gustav. “Piezoelectric Sensorics”. Berlin: Springer – Verlag,
2004
[2]
Curie, Jaques. Curie, Pierre. “C. R. Academy of the Sciences 91 (1880)
294.” Bull.soc.min.de France 3 (1880) 90
[3]
Gabriel J., Lippmann, “Principe de la conservation de l’´electricit´e ou
second principe de la theorie des ph´enomênes ´electriques,” Annales de
chimie et de physique, 24 (1881): 145–177,
[4]
Prechtl, Eric Frederick. “Development of a Piezoelectric Serrvo-Flap
Actuator for Helicoptor Rotor.” Massachusetts Institute of Technology:
123 pgs. 4 Apr 1994
[5]
Phillips, James R. "Piezoelectric Technology Primer." CTS Wireless
Components: 17 pgs. 6 Dec 2005
<www.ctscorp.com/components/Datasheets/piezotechprimer.pdf>.
[6]
Arnau, Antonio., ed. “Piezoelectric Transducers and Applications”. Berlin:
Springer – Verlag, 2004
[7]
Pozar, David M. “Microwave Engineering”. New York: John Wiley &
Sons, 2003
[8]
Limitations - Piezoelectric Tutorial 11 Morgan Electro Ceramics
Piezoelectric Tutorial 11. Morgan ElectroCeramics. 6 Dec 2005.
<http://www.morganelectroceramics.com/piezoguide18.html>
[9]
Noliac.com. Noliac Inc. 6 Dec 2005
<http://www.noliac.com/index.asp?id=98>.
88
[10]
Seacor Piezoelectric Ceramics – Definitions and Terminology. Seacor
Piezoelectric Ceramics. 8 Dec 2005
<http://www.seacorpiezo.com/defin_terms/symbol.html>
[11]
Lin, C.H. et al. "Preliminary Attempt to Create a Smart Bridge Design and
Implimentation" National Taiwan University: 12 pgs. 6 Dec 2005
< http://www.engineering.ucsb.edu/~lin/publications/bridge.pdf>.
[12]
Strain Energy Harvesting for Strain Energy Harvesting for Wireless Sensor
Wireless Sensor Networks. Microstrain Inc. 13 April 2006
<http://www.microstrain.com/white/pdf/strainenergyharvesting.pdf >.
[13]
Hosono, Y. Yamashita, Y. and Ichinose, N. “Piezoelectric Materials
Pb(In1/2Nb1/2)O3-Pb(Mg1/3Nb1/3)O3-PbTiO3 with High Curie Temperatures
and Large Piezoelectric constants” 2003 IEEE Ultrasonics Symposium.
pp 770-773
[14]
Ferrari, Marco. Ferrari, Vittorio. Marioli, Daniele. Taroni, Andrea.
“Modeling, fabrication and performance measurements of a piezoelectric
energy converter for power harvesting in autonomous microsystems.”
Instrumentation and Measurment Technology COnfrence, 2005. pp.18621866
[15]
Ottman, G.K. Hofmann, H.F. Bhatt, A.C. “Adaptive piezoelectric energy
harvesting circuit for wireless remote power supply”. Lesieutre, G.A.;
IEEE Transactions on Power Electronics, Volume 17, Issue 5, Sept.
2002 Page(s):669 - 676
89
[16]
Ottman, G.K.; Hofmann, H.F.; Lesieutre, G.A. “Optimized piezoelectric
energy harvesting circuit using step-down converter in discontinuous
conduction mode”. IEEE Transactions on Power Electronics, Volume 18,
Issue 2, March 2003 Page(s):696 - 703
[17]
Tayahi, Moncef B. Johnson, Bruce. Holtzman, Melinda. Cadet, Gardy.
“Piezoelectric Materials for Powering Remote Sensors.” Performance,
Computing, and Communications Conference, 2005. IPCCC 2005. 24th
IEEE International. pp 383-386
[18]
Keawboonchuay, C. Engel, T.G. “Electrical power generation
characteristics of piezoelectric generator under quasi-static and dynamic
stress conditions.” IEEE Transactions on Ultrasonics, Ferroelectrics and
Frequency Control, vol. 50, Issue 10, pp.1377 – 1382, Oct. 2000
[19]
Keawboonchuay, C. Engel, T.G. “Maximum power generation in a
piezoelectric pulse generator.” IEEE Transactions on Plasma Science,
vol. 31, Issue 1, Part 2, pp. 123 – 128, Feb. 2003
[20]
Engel, T.G.; Keawboonchuay, C.; Nunnally, W.C. “Energy conversion and
high power pulse production using miniature piezoelectric compressors.”
IEEE Transactions on Plasma Science, Volume 28, Issue 5, Oct. 2000
Page(s):1338 – 1341
[21]
Keawboonchuay, C.; Engel, T.G. “Design, modeling, and implementation
of a 30-kW piezoelectric pulse generator.” IEEE Transactions on Plasma
Science, Volume 30, Issue 2, Part 2, April 2002 Page(s):679 – 686
90
[22]
Keawboonchuay, C.; Engel, T.G. “Scaling relationships and maximum
peak power generation in a piezoelectric pulse generator.” IEEE
Transactions on Plasma Science, Volume 32, Issue 5, Part 1, Oct. 2004
Page(s):1879 - 1885
[23]
Advanced Cerametrics Incorporated. <
http://www.advancedcerametrics.com/ >
[24]
Omnitek Incorporated < http://www.omnitek-usa.com/ >
[25]
Nise, Norman. Control Systems Engineering. New York: John Wiley &
Sons, Inc. 2000
91
Appendix 1 – CMAR 3, S1 Material
Symbol
Unit
H1
ε1,r
ε3,rX
ε1,rS
ε3,rS
X
S1
S2
1193.04
1795.99
2438.00
1325.63
1802.77
2874.16
828.30
1129.69
1341.00
699.67
913.73
1221.61
0.003
0.017
0.016
330
350
235
kp
0.568
0.592
0.643
tan δ
TC >
(3X)
ºC
kt
0.471
0.469
0.524
k31
0.327
0.327
0.370
k33
0.684
0.699
0.752
k15
0.553
0.609
0.671
d31
C/N
-1.28E-10
-1.70E-10
-2.43E-10
d33
C/N
3.28E-10
4.25E-10
5.74E-10
d15
C/N
3.27E-10
5.06E-10
7.24E-10
dh
C/N
V
m/N
V
m/N
V
m/N
7.24E-11
8.50E-11
8.82E-11
-0.0109
-0.0107
-0.0096
0.0280
0.0267
0.0226
g31
g33
g15
e31
e33
0.0389
0.0373
0.0321
2
-2.80
-3.09
-5.06
2
14.7
16.0
21.2
2
11.64
3.82E+08
13.40
4.68E+08
C/m
C/m
e15
C/m
h31
V/m
9.86
4.52E+08
h33
V/m
2.37E+09
1.98E+09
1.96E+09
h15
V/m
1.34E+09
1.16E+09
1.13E+09
Np
m/s
2209.94
2011.08
1970.47
Nt
m/s
2038
1953
1966
N31
m/s
1500
1400
1410
N33
m/s
1800
1500
1500
N15
m/s
1018
896
822
776
89
76
74
7700
0.389
195
7460
0.340
Qm,p
ρ
σE
kg/m
373
7700
0.334
s11E
m2/N
1.30E-11
1.70E-11
1.70E-11
s12E
s13E
2
m /N
-4.35E-12
-6.60E-12
-5.78E-12
2
-7.05E-12
-8.61E-12
-8.79E-12
Qm,t
3
m /N
92
s33E
s44E =
s55E
m2/N
1.96E-11
2.32E-11
2.29E-11
m2/N
3.32E-11
4.35E-11
5.41E-11
s66
2
m /N
3.47E-11
4.71E-11
4.56E-11
s11D
m2/N
1.16E-11
1.51E-11
1.47E-11
2
m /N
-5.74E-12
-8.41E-12
-8.10E-12
2
m /N
-3.47E-12
-4.08E-12
-3.30E-12
2
m /N
1.05E-11
1.19E-11
9.94E-12
m2/N
2.31E-11
2.73E-11
2.98E-11
2
1.68E+11
1.47E+11
1.34E+11
2
1.10E+11
1.05E+11
8.97E+10
2
9.99E+10
9.37E+10
8.57E+10
2
N/m
1.23E+11
1.13E+11
1.09E+11
N/m2
3.01E+10
2.30E+10
1.85E+10
s12D
s13D
s33D
s44D =
s55D
c11E
c12E
c13E
c33E
c44E =
c55E
N/m
N/m
N/m
c66
2
N/m
2.88E+10
2.12E+10
2.20E+10
c11D
N/m2
1.69E+11
1.49E+11
1.36E+11
c12D
N/m2
1.12E+11
1.06E+11
9.21E+10
2
9.33E+10
8.75E+10
7.58E+10
2
N/m
1.58E+11
1.44E+11
1.51E+11
N/m2
4.34E+10
3.66E+10
3.36E+10
GPa
76.93
58.98
58.82
GPa
50.92
43.10
43.65
GPa
86.16
66.04
68.13
GPa
95.61
84.25
100.57
c13D
c33D
c44D =
c55D
Y11E
Y33E
Y11D
Y33D
N/m
93
Appendix 2 – PZT Type 5a Material
94
Appendix 3 – PZT Type 8 Material
95
Appendix 4 – Matlab Simulink Code
96
97
98