Discrete-time signals and systems 1 Discrete-time signals
advertisement

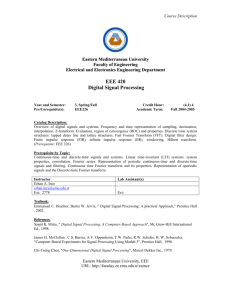
Discrete-time signals and systems x[−3] x[−2] x[−4] x[−1] See Oppenheim and Schafer, Second Edition pages 8–93, or First Edition pages 8–79. x[4] x[0] 1 ... −4 −3 −2 ... 2 3 −1 0 4 x[1] 1 Discrete-time signals n x[3] x[2] A discrete-time signal is represented as a sequence of numbers: x D fxŒng; (This can be plotted using the MATLAB function stem.) The value xŒn is undefined for noninteger values of n. 1 < n < 1: Here n is an integer, and xŒn is the nth sample in the sequence. Discrete-time signals are often obtained by sampling continuous-time signals. In this case the nth sample of the sequence is equal to the value of the analogue signal xa .t / at time t D nT : xŒn D xa .nT /; Sequences can be manipulated in several ways. The sum and product of two sequences xŒn and yŒn are defined as the sample-by-sample sum and product respectively. Multiplication of xŒn by a is defined as the multiplication of each sample value by a. A sequence yŒn is a delayed or shifted version of xŒn if 1 < n < 1: yŒn D xŒn The sampling period is then equal to T , and the sampling frequency is fs D 1=T . with n0 an integer. The unit sample sequence xa .1T / ... n0 ; 1 ... t x[1] is defined as For this reason, although xŒn is strictly the nth number in the sequence, we often refer to it as the nth sample. We also often refer to “the sequence xŒn” when we mean the entire sequence. Discrete-time signals are often depicted graphically as follows: 1 n 0 ıŒn D 8 <0 n¤0 :1 n D 0: This sequence is often referred to as a discrete-time impulse, or just impulse. It plays the same role for discrete-time signals as the Dirac delta function does for continuous-time signals. However, there are no mathematical 2 complications in its definition. The unit step is related to the impulse by An important aspect of the impulse sequence is that an arbitrary sequence can be represented as a sum of scaled, delayed impulses. For example, the sequence a a a 2 a 1 −2 −1 0 2 C D 2 3 ıŒn k: Conversely, the unit sample sequence can be expressed as the first backward difference of the unit step sequence n 4 a1 1 X kD0 a3 ıŒn D uŒn a2 uŒn 1: Exponential sequences are important for analysing and representing discrete-time systems. The general form is can be represented as 4 ıŒn 1 C ıŒn ... 1 −3 uŒn D ıŒn C ıŒn a4 a0 ... xŒn D a ıŒk: kD 1 Alternatively, this can be expressed as 3 4 −4 n X uŒn D C 4 C a 3 ıŒn C 3 C a Ca1 ıŒn 2 ıŒn 1 C a2 ıŒn C 2 C a 2 C a3 ıŒn 1 ıŒn C 1 C a0 ıŒn 3 C a4 ıŒn If A and ˛ are real numbers then the sequence is real. If 0 < ˛ < 1 and A is positive, then the sequence values are positive and decrease with increasing n: In general, any sequence can be expressed as xŒn D 1 X xŒn D A˛ n : 4: xŒkıŒn k: ... kD 1 ... The unit step sequence 0 n 1 For 1 < ˛ < 0 the sequence alternates in sign, but decreases in magnitude. For j˛j > 1 the sequence grows in magnitude as n increases. n 0 is defined as A sinusoidal sequence ... uŒn D 8 <1 n0 :0 n < 0: 3 0 4 n ... has the form Thus the discrete-time sinusoid is only periodic if xŒn D A cos.!0 n C / for all n; with A and real constants. The exponential sequence A˛ n with complex ˛ D j˛je j!0 and A D jAje j can be expressed as xŒn D A˛ n D jAje j j˛jn e j!0 n D jAjj˛jn e j.!0 nC/ n A cos.!0 n C / D A cos.!0 n C !0 N C /; which requires that !0 N D 2k for k an integer: n D jAjj˛j cos.!0 n C / C j jAjj˛j sin.!0 n C /; so the real and imaginary parts are exponentially weighted sinusoids. When j˛j D 1 the sequence is called the complex exponential sequence: xŒn D jAje j.!0 nC/ D jAj cos.!0 n C / C j jAj sin.!0 n C /: The frequency of this complex sinusoid is !0 , and is measured in radians per sample. The phase of the signal is . The index n is always an integer. This leads to some important differences between the properties of discrete-time and continuous-time complex exponentials: Consider the complex exponential with frequency .!0 C 2/: xŒn D Ae j.!0 C2/n D Ae j!0 n e j 2 n D Ae j!0 n : The same condition is required for the complex exponential sequence C e j!0 n to be periodic. The two factors just described can be combined to reach the conclusion that there are only N distinguishable frequencies for which the corresponding sequences are periodic with period N . One such set is !k D 2k ; N k D 0; 1; : : : ; N Additionally, for discrete-time sequences the interpretation of high and low frequencies has to be modified: the discrete-time sinusoidal sequence xŒn D A cos.!0 n C / oscillates more rapidly as !0 increases from 0 to , but the oscillations become slower as it increases further from to 2. Thus the sequence for the complex exponential with frequency !0 is exactly the same as that for the complex exponential with frequency .!0 C 2/. More generally, complex exponential sequences with frequencies .!0 C 2 r/, where r is an integer, are indistinguishable from one another. Similarly, for sinusoidal sequences xŒn D A cosŒ.!0 C 2 r/n C D A cos.!0 n C /: In the continuous-time case, sinusoidal and complex exponential sequences are always periodic. Discrete-time sequences are periodic (with period N) if xŒn D xŒn C N for all n: 5 1: 6 2 Discrete-time systems !0 D 0 1 0 A discrete-time system is defined as a transformation or mapping operator that maps an input signal xŒn to an output signal yŒn. This can be denoted as −1 !0 D 8 1 yŒn D T fxŒng: 0 −1 T fg !0 D 4 1 x[n] 0 −1 y[n] Example: Ideal delay !0 D 1 0 yŒn D xŒn nd W !0 D 15 8 !0 D 7 4 −1 1 x[n] ... 0 ... −1 1 −3 −2 −1 0 1 2 3 n 0 −1 −8 −6 −4 −2 0 2 4 6 8 The sequence corresponding to !0 D 0 is indistinguishable from that with !0 D 2. In general, any frequencies in the vicinity of !0 D 2k for integer k are typically referred to as low frequencies, and those in the vicinity of !0 D . C 2k/ are high frequencies. y[n]=x[n−2] ... ... −1 0 1 2 3 This operation shifts input sequence later by nd samples. 7 8 4 5 n yŒn D xŒn Example: Moving average yŒn D M2 X 1 xŒn M1 C M2 C 1 k nd is not unless nd D 0. 2.2 Linear systems kD M1 For M1 D 1 and M2 D 1, the input sequence A system is linear if the principle of superposition applies. Thus if y1 Œn is the response of the system to the input x1 Œn, and y2 Œn the response to x2 Œn, then linearity implies y[3] Additivity: x[n] ... T fx1 Œn C x2 Œng D T fx1 Œng C T fx2 Œng D y1 Œn C y2 Œn ... −1 0 1 2 3 4 5 n Scaling: T fax1 Œng D aT fx1 Œng D ay1 Œn: y[2] yields an output with These properties combine to form the general principle of superposition T fax1 Œn C bx2 Œng D aT fx1 Œng C bT fx2 Œng D ay1 Œn C by2 Œn: :: : 1 yŒ2 D .xŒ1 C xŒ2 C xŒ3/ 3 1 yŒ3 D .xŒ2 C xŒ3 C xŒ4/ 3 :: : In all cases a and b are arbitrary constants. This property generalises to many inputs, so the response of a linear system to P P xŒn D k ak xk Œn will be yŒn D k ak yk Œn. 2.3 Time-invariant systems In general, systems can be classified by placing constraints on the transformation T fg. A system is time invariant if a time shift or delay of the input sequence causes a corresponding shift in the output sequence. That is, if yŒn is the response to xŒn, then yŒn n0 is the response to xŒn n0 . 2.1 Memoryless systems For example, the accumulator system A system is memoryless if the output yŒn depends only on xŒn at the same n. For example, yŒn D .xŒn/2 is memoryless, but the ideal delay 9 yŒn D n X kD 1 10 xŒk is time invariant, but the compressor system yŒn D xŒM n for M a positive integer (which selects every M th sample from a sequence) is not. 2.4 Causality is an example of an unbounded system, since its response to the unit step uŒn is 8 n <0 X n<0 uŒn D yŒn D :n C 1 n 0; kD 1 which has no finite upper bound. 3 Linear time-invariant systems A system is causal if the output at n depends only on the input at n and earlier inputs. For example, the backward difference system yŒn D xŒn xŒn 1 is causal, but the forward difference system yŒn D xŒn C 1 xŒn If the linearity property is combined with the representation of a general sequence as a linear combination of delayed impulses, then it follows that a linear time-invariant (LTI) system can be completely characterised by its impulse response. Suppose hk Œn is the response of a linear system to the impulse ıŒn n D k. Since ( 1 ) X yŒn D T xŒkıŒn k ; k at kD 1 is not. the principle of superposition means that yŒn D 2.5 Stability 1 X xŒkT fıŒn kg D Bounded input: jxŒnj Bx < 1 yŒn D kD 1 11 1 X xŒkhŒn k is k: kD 1 For example, the accumulator n X If the system is additionally time invariant, then the response to ıŒn hŒn k. The previous equation then becomes yŒn D Bounded output: jyŒnj By < 1. xŒkhk Œn: kD 1 kD 1 A system is stable if every bounded input sequence produces a bounded output sequence: 1 X xŒn This expression is called the convolution sum. Therefore, a LTI system has the property that given hŒn, we can find yŒn for any input xŒn. Alternatively, yŒn is the convolution of xŒn with hŒn, denoted as follows: yŒn D xŒn hŒn: 12 The previous derivation suggests the interpretation that the input sample at n D k, represented by xŒkıŒn k, is transformed by the system into an output sequence xŒkhŒn k. For each k, these sequences are superimposed to yield the overall output sequence: hŒn xŒn h[k] −2 5 0 Reflect h[−k] 1 −1 0 n 0 k −5 n k 0 2 h[n−k] Shift xŒ 1hŒn C 1 xŒ 1ıŒn C 1 k n−5 −1 0 n xŒ1ıŒn 0 n xŒ1hŒn 1 1 1 0 n 0 yŒn D xŒ 1hŒn C 1 C xŒ1hŒn 0 n 1 n A slightly different interpretation, however, leads to a convenient computational form: the nth value of the output, namely yŒn, is obtained by multiplying the input sequence (expressed as a function of k) by the sequence with values hŒn k, and then summing all the values of the products xŒkhŒn k. The key to this method is in understanding how to form the sequence hŒn k for all values of n of interest. The sequence hŒn to k D n. 0 n+2 k is then obtained by shifting the origin of the sequence To implement discrete-time convolution, the sequences xŒk and hŒn k are multiplied together for 1 < k < 1, and the products summed to obtain the value of the output sample yŒn. To obtain another output sample, the procedure is repeated with the origin shifted to the new sample position. Example: analytical evaluation of the convolution sum Consider the output of a system with impulse response 8 <1 0nN 1 hŒn D :0 otherwise to the input xŒn D an uŒn. To find the output at n, we must form the sum over all k of the product xŒkhŒn k. To this end, note that hŒn k D hŒ .k n/. The sequence hŒ k is seen to be equivalent to the sequence hŒk reflected around the origin: 13 n 14 4 Properties of LTI systems x[n] 1 All LTI systems are described by the convolution sum 0.5 yŒn D 0 −10 −5 0 k 5 xŒkhŒn k: kD 1 10 Some properties of LTI systems can therefore be found by considering the properties of the convolution operation: 1 h[n−k] 1 X Commutative: xŒn hŒn D hŒn xŒn 0.5 0 −10 Distributive over addition: xŒn .h1 Œn C h2 Œn/ D xŒn h1 Œn C xŒn h2 Œn: −5 n−(N−1) 0 k n 5 10 Cascade connection: Since the sequences are non-overlapping for all negative n, the output must be zero: yŒn D 0; For 0 n N follows that n X h1 Œn k D ak , so it 0nN 1: kD0 x[n] h2 Œn h1 Œn y[n] Parallel connection: Finally, for n > N 1 the product terms are xŒkhŒn k D ak as before, but the lower limit on the sum is now n N C 1. Therefore yŒn D y[n] yŒn D hŒn xŒn D h1 Œn h2 Œn xŒn D h2 Œn h1 Œn xŒn. ak ; n X h2 Œn n < 0: 1 the product terms in the sum are xŒkhŒn yŒn D x[n] h1 Œn x[n] k a ; n>N y[n] h2 Œn 1: kDn N C1 yŒn D .h1 Œn C h2 Œn/ xŒn D hp Œn xŒn. Additional important properties are: A LTI system is stable if and only if S D 15 16 P1 kD 1 jhŒkj < 1. The ideal delay system hŒn D ıŒn average system hŒn D D nd is stable since S D 1 < 1; the moving hŒn D an uŒn; M2 X 1 ıŒn k M1 C M2 C 1 kD M1 8 1 < M nM 1 M1 CM2 C1 :0 otherwise; hŒn D n X 8 <1 :0 nD0 jan j nD0 1 X jajn D nD0 1 1 jaj <1 (it is the sum of an infinite geometric series). Consider the system Forward difference One−sample delay ıŒn/ ıŒn n0 D ıŒn 1 ıŒn C 1 n<0 D ıŒn ıŒn uŒn D 1. A LTI system is causal if and only if hŒn D 0 for n < 0. The ideal delay system is causal if nd 0; the moving average system is causal if M1 0 and M2 0; the accumulator and backward difference systems are causal; the forward difference system is noncausal. Systems with only a finite number of nonzero values in hŒn are called Finite duration impulse response (FIR) systems. FIR systems are stable if each impulse response value is finite. The ideal delay, the moving average, and the forward and backward difference described above fall into this class. Infinite impulse response (IIR) systems, such as the accumulator system, are more difficult to analyse. For example, the accumulator system is unstable, but the 17 1 X hŒn D .ıŒn C 1 D uŒn P1 SD which has ıŒk kD 1 D jaj < 1 is stable since 2 the forward difference system hŒn D ıŒn C 1 ıŒn, and the backward difference system hŒn D ıŒn ıŒn 1 are stable since S is the sum of a finite number of finite samples, and is therefore less than 1; the accumulator system is unstable since S D IIR system ıŒn 1 1 ıŒn 1: This is the impulse response of a backward difference system: One−sample delay Forward difference Backward difference Here a non-causal system has been converted to a causal one by cascading with a delay. In general, any non-causal FIR system can be made causal by cascading with a sufficiently long delay. Consider the system consisting of an accumulator followed by a backward difference: 18 we obtain the recursion representation Backward difference Accumulator x[n] y[n] One−sample delay The impulse response of this system is hŒn D uŒn .ıŒn ıŒn 1/ D uŒn uŒn 1 D ıŒn: The output is therefore equal to the input because xŒn ıŒn D xŒn. Thus the backward difference exactly compensates for (or inverts) the effect of the accumulator — the backward difference system is the inverse system for the accumulator, and vice versa. We define this inverse relationship for all LTI systems: hŒn hi Œn D ıŒn: where at n we add the current input xŒn to the previously accumulated sum yŒn 1. Example: difference equation representation of moving average Consider now the moving average system with M1 D 0: hŒn D 5 Linear constant coefficient difference equations ak yŒn k D M X bm xŒn yŒn D x[n] y[n] Backward difference M2 X 1 xŒn M2 C 1 hŒn D 1 .ıŒn M2 C 1 ıŒn x[n] x[n] + M2 1/ uŒn x1 Œn 1=.M2 C 1/ .M2 C 1/ 19 k; so Attenuator Here yŒn yŒn 1 D xŒn, which can be written in the desired form with N D 1, a0 D 1, a1 D 1, M D 0, and b0 D 1. Rewriting as yŒn D yŒn 1/: which is a LCCDE with N D 0, a0 D 1, and M D M2 , bk D 1=.M2 C 1/. Using the sifting property of ıŒn, m: Example: difference equation representation of the accumulator Take for example the accumulator Accumulator M2 kD0 mD0 kD0 uŒn The output of the system is Some LTI systems can be represented in terms of linear constant coefficient difference (LCCD) equations N X 1 .uŒn M2 C 1 sample delay 1 C xŒn 20 − Accumulator y[n] Here x1 Œn D 1=.M2 C 1/.xŒn xŒn yŒn yŒn 1 D x1 Œn. Therefore yŒn yŒn 1 D M2 1 .xŒn M2 C 1 1/ and for the accumulator xŒn M2 Complex exponentials 1/; which is again a (different) LCCD equation with N D 1, a0 D 1, a1 D b0 D bM2 C1 D 1=.M2 C 1/. xŒn D e j!n ; 1<n<1 1, As for constant coefficient differential equations in the continuous case, without additional information or constraints a LCCDE does not provide a unique solution for the output given an input. Specifically, suppose we have the particular output yp Œn for the input xp Œn. The same equation then has the solution yŒn D yp Œn C yh Œn; where yh Œn is any solution with xŒn D 0. That is, yh Œn is an homogeneous solution to the homogeneous equation N X Fourier transform. Its properties are recapped here (with examples) to show nomenclature. are eigenfunctions of LTI systems: yŒn D 1 X hŒke j!.n k/ De 1 X j!n hŒke j!k kD 1 kD 1 ! : Defining H.e j! / D 1 X j!k hŒke kD 1 j! j!n we have that yŒn D H.e /e D H.e j! /xŒn. Therefore, e j!n is an eigenfunction of the system, and H.e j! / is the associated eigenvalue. The quantity H.e j! / is called the frequency response of the system, and ak yh Œn k D 0: kD0 It can be shown that there are N nonzero solutions to this equation, so a set of N auxiliary conditions are required for a unique specification of yŒn for a given xŒn. If a system is LTI and causal, then the initial conditions are initial rest conditions, and a unique solution can be obtained. H.e j! / D HR .e j! / C jHI .e j! / D jH.e j! /je j ^H.e The frequency response is therefore 21 j!nd Alternatively, for the ideal delay hŒn D ıŒn H.e j! / D The Fourier transform considered here is strictly speaking the discrete-time Fourier transform (DTFT), although Oppenheim and Schafer call it just the : Example: frequency response of ideal delay: Consider the input xŒn D e j!n to the ideal delay system yŒn D xŒn the output is yŒn D e j!.n nd / D e j!nd e j!n : H.e j! / D e 6 Frequency-domain representation of discrete-time signals and systems j! / 1 X ıŒn nd e : nd , j!n De j!nd nD 1 The real and imaginary parts of the frequency response are 22 : nd : HR .e j! / D cos.!nd / and HI .e j! / D sin.!nd /, or alternatively Hlp .e j! / 1 jH.e j! /j D 1 ^H.e j! / D !nd : 2 !c The frequency response of a LTI system is essentially the same for continuous and discrete time systems. However, an important distinction is that in the discrete case it is always periodic in frequency with a period 2: H.e j.!C2/ /D D D 1 X nD 1 1 X nD 1 1 X hŒne j.!C2/n hŒne j!n hŒne j!n e !c 0 Only required part Due to the periodicity in the response, it is only necessary to consider one frequency cycle, usually chosen to be the range to . Other examples of ideal filters are: j 2 n Hhp .e j! / 1 Highpass D H.e j! /: nD 1 0 !c This last result holds since e ˙j 2 n D 1 for integer n. The reason for this periodicity is related to the observation that the sequence ˚ j!n e ; 1<n<1 has exactly the same values as the sequence n o e j.!C2/n ; 1 < n < 1: !c ! j! 1 Hbs .e / Bandstop !b 0 !a 1 !a Hbp .e j! / !b ! Bandpass A system will therefore respond in exactly the same way to both sequences. Example: ideal frequency selective filters The frequency response of an ideal lowpass filter is as follows: ! 2 !b !a 0 !a !b ! In these cases it is implied that the frequency response repeats with period 2 outside of the plotted interval. Example: frequency response of the moving-average system 23 24 The frequency response of the moving average system 8 1 < M1 n M2 hŒn D M1 CM2 C1 :0 otherwise 7 Fourier transforms of discrete sequences The discrete time Fourier transform (DTFT) of the sequence xŒn is X.e j! / D is given by H.e j! / D xŒne j!n : nD 1 1 e j!.M2 CM1 C1/=2 e j!.M2 CM1 C1/=2 e M1 C M2 C 1 1 e j! e j!.M2 CM1 C1/=2 e j!.M2 CM1 C1/=2 1 e M1 C M2 C 1 e j!=2 e j!=2 sinŒ!.M1 C M2 C 1/=2 j!.M2 M1 / 1 2 : e D M1 C M2 C 1 sin.!=2/ D j!.M2 2 M1 C1/ j!.M2 M1 / 2 This is also called the forward transform or analysis equation. The inverse Fourier transform, or synthesis formula, is given by the Fourier integral Z 1 X.e j! /e j!n d!: xŒn D 2 The Fourier transform is generally a complex-valued function of !: X.e j! / D XR .e j! / C jXI .e j! / D jX.e j! /je j ^X.e For M1 D 0 and M2 D 4, j! / : The quantities jX.e j! /j and ^X.e j! / are referred to as the magnitude and phase of the Fourier transform. The Fourier transform is often referred to as the Fourier spectrum. jH.e j! /j 1 Since the frequency response of a LTI system is given by 0 2 2 5 0 2 5 2 ! ^H.e j! / 1 X 0 2 ! This system attenuates high frequencies (at around ! D ), and therefore has the behaviour of a lowpass filter. 25 hŒke j!k ; it is clear that the frequency response is equivalent to the Fourier transform of the impulse response, and the impulse response is Z 1 H.e j! /e j!n d!: hŒn D 2 0 1 X kD 1 2 H.e j! / D A sufficient condition for the existence of the Fourier transform of a sequence P xŒn is that it be absolutely summable: 1 nD 1 jxŒnj < 1. In other words, P1 the Fourier transform exists if the sum nD 1 jxŒnj converges. The Fourier transform may however exist for sequences where this is not true — a rigorous mathematical treatment can be found in the theory of generalised functions. 26 8 Symmetry properties of the Fourier transform Sequence xŒn Transform X.e j! / x Œn Any sequence xŒn can be expressed as xŒn D xe Œn C xo Œn; where xe Œn is conjugate symmetric (xe Œn D xe Œ n) and xo Œn is conjugate antisymmetric (xo Œn D xo Œ n). These two components of the sequence can be obtained as: 1 .xŒn C x Œ n/ D xe Œ n 2 1 xo Œn D .xŒn x Œ n/ D xo Œ n: 2 X .e j! / x Œ n X .e j! / RefxŒng Xe .e j! / j ImfxŒng Xo .e j! / xe Œn XR .e j! / xo Œn jXI .e j! / xe Œn D If a real sequence is conjugate symmetric, then it is an even sequence, and if conjugate antisymmetric, then it is odd. j! Similarly, the Fourier transform X.e / can be decomposed into a sum of conjugate symmetric and antisymmetric parts: X.e j! / D Xe .e j! / C Xo .e j! /; Most of these properties can be proved by substituting into the expression for the Fourier transform. Additionally, for real xŒn the following also hold: xŒn 1 ŒX.e j! / C X .e 2 1 Xo .e j! / D ŒX.e j! / X .e 2 Xe .e j! / D j! j! / X.e j! / D X .e j! xŒn XR .e xŒn XI .e j! / D xŒn jX.e j! /j D jX.e xŒn where Transform X.e j! / Real sequence xŒn ^X.e j! j! / D XR .e /D j! ^X.e xe Œn XR .e xo Œn jXI .e j! / / j! XI .e j! / j! / /j j! / / /: 9 Fourier transform theorems With these definitions, and letting X.e j! / D XR .e j! / C jXI .e j! /; the symmetry properties of the Fourier transform can be summarised as follows: 27 Let X.e j! / be the Fourier transform of xŒn. The following theorems then apply: 28 Sequences xŒn, yŒn Transforms X.e j! /, Y .e j! / Property axŒn C byŒn aX.e j! / C bY .e j! / Linearity xŒn e j!0 n nd e xŒn j!nd X.e xŒ n j.! !0 / X.e nxŒn j X.e j! / j! 1 2 xŒnyŒn / Frequency shift / Time reversal dX.e j! / Frequency diff. d! j! xŒn yŒn Time shift j! X.e /Y .e / R j j.! / /d X.e /Y .e Convolution Modulation Some useful Fourier transform pairs are: Sequence Fourier transform ıŒn ıŒn 1 n0 1 . 1 < n < 1/ n a uŒn .jaj < 1/ uŒn .n C 1/an uŒn .jaj < 1/ sin.!c n/ n xŒn D 8 <1 :0 e P1 kD 1 2ı.! C 2k/ 1 1 ae j! P 1 C 1 kD 1 ı.! C 2k/ 1 e j! 1 8.1 ae j! /2 X.e j! / D <1 :0 0nM j!j < !c !c < j!j sinŒ!.M C1/=2 e j!M=2 sin.!=2/ otherwise e j!n0 P1 j!0 n kD 1 29 2ı.! !0 C 2k/