7.2.2 Mini-Project - The Klein Model
advertisement

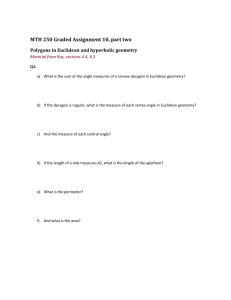
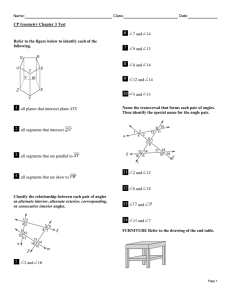
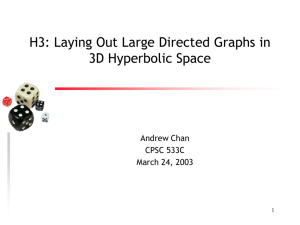
7.2. MODELS OF HYPERBOLIC GEOMETRY 7.2.2 271 Mini-Project - The Klein Model The Poincaré model preserves the Euclidean notion of angle, but at the expense of defining lines in a fairly strange manner. Is there a model of hyperbolic geometry, built within Euclidean geometry, that preserves both the Euclidean definition of lines and the Euclidean notion of angle? Unfortunately, this is impossible. If we had such a model, and ∆ABC was any triangle, then the angle sum of the triangle would be 180 degrees, which is a property that is equivalent to the parallel postulate of Euclidean geometry [Exercise 2.1.8 in Chapter 2]. A natural question to ask is whether it is possible to find a model of hyperbolic geometry, built within Euclidean geometry, that preserves just the Euclidean notion of lines. In this project we will investigate a model first put forward by Felix Klein, where hyperbolic lines are segments of Euclidean lines. Klein’s model starts out with the same set of points we used for the Poincaré model, the set of points inside the unit disk. However, lines will be defined differently. A hyperbolic line (or Klein line) in this model will be any chord of the boundary circle (minus its points on the boundary circle). Here is a collection of Klein lines. Exercise 7.2.1. Show that Euclid’s first two postulates are satisfied in this model. In order to verify Euclid’s third postulate, we will need to define a distance function. 272 CHAPTER 7. NON-EUCLIDEAN GEOMETRY Definition 7.4. The hyperbolic distance from P to Q in the Klein model is dK (P, Q) = ¯ ¯ 1 ¯¯ (P S) (QR) ¯¯ ln( ) 2 ¯ (P R) (QS) ¯ (7.2) where R and S are the points where the hyperbolic line (chord of the circle) through P and Q meets the boundary circle. Note the similarity of this definition to the definition of distance in the Poincaré model. We will show at the end of this chapter that the Klein and Poincaré models are isomorphic. That is, there is a one-to-one map between the models that preserves lines and angles and also preserves the distance functions. Just as we did in the Poincaré model, we now define a circle as the set of points a given (hyperbolic) distance from a center point. Exercise 7.2.2. Show that Euclid’s third postulate is satisifed with this definition of circles. [Hint: Use the continuity of the logarithm function, as well as the fact that the logarithm is an unbounded function.] Euclid’s fourth postulate deals with right angles. Let’s skip this postulate for now and consider the hyperbolic postulate. It is clear that given a line and a point not on the line, there are many parallels (non-intersecting lines) to the given line through the point. Draw some pictures on a piece of paper to convince yourself of this fact. Now, let’s return to the question of angles and, in particular, right angles. What we need is a notion of perpendicularity of lines meeting at a point. Let’s start with the simplest case, where one of the lines, say l, is a diameter of the Klein disk. Suppose we define another line m to be (hyperbolically) perpendicular to l at a point P if it is perpendicular to l in the Euclidean sense. 273 7.2. MODELS OF HYPERBOLIC GEOMETRY Shown here are several Klein lines perpendicular to the Klein line l, which is a diameter of the boundary circle. O l It is clear that we cannot extend this definition to non-diameter chords directly. If we did so, then right angles would have the same meaning in the Klein model as they do in the Euclidean plane, which would mean that parallels would have to satisfy the Euclidean parallel postulate. The best we can hope for is an extension of some property of perpendiculars to a diameter. If we consider the extended plane, with the point at infinity attached, then all the perpendicular lines to the diameter l in the figure above meet at the point at infinity. The point at infinity is the inverse point to the origin O, with respect to the unit circle (as was discussed at the end of Chapter 2). Also, O has a unique position on l—it is the Euclidean midpoint of the chord defining l. If we move l to a new position, say to line l 0 , so that l0 is no longer a diameter, then it makes sense that the perpendiculars to l would also move to new perpendiculars to l 0 , but in such a way that they still intersected at the inverse point of the midpoint of the chord for l 0 . This inverse point is called the pole of the chord. Definition 7.5. The pole of chord AB in a circle c is the inverse point of the midpoint of AB with respect to the circle. From our work in Chapter 2, we know that the pole of chord AB is also the intersection of the tangents at A and B to the circle. 274 CHAPTER 7. NON-EUCLIDEAN GEOMETRY Here we see a Klein line with Euclidean midpoint M and tangents at A and B (which are not actually points in the Klein model) meeting at pole P . Notice that the three chords (m1, m2, and m3) inside the circle have the property that, when extended, they pass through the pole. It makes sense to extend our definition of perpendicularity to state that these three chords will be perpendicular (in the hyperbolic sense) to the given line (AB) at the points of intersection. B m1 m2 O M P m3 A Definition 7.6. A line m is perpendicular to a line l (in the Klein model) if the Euclidean line for m passes through the pole P of l. Exercise 7.2.3. Use this definition of perpendicularity to sketch some perpendicular lines in the Klein model. Then, use this definition to show that the common perpendicular to two parallel Klein lines exists in most cases. That is, show that there is a Klein line that meets two given parallel Klein lines at right angles, except in one special case of parallels. Describe this special case. Given a Klein line l (defined by chord AB) and a point P not on l, there are two chords BC and AD, both passing through P and parallel to l (only intersections are on the boundary). These two parallels possess the interesting property of dividing the set of all lines through P into two subsets: those that intersect l and those that are parallel to l. These special parallels (AD and BC) will be called limiting parallels to l at P . (A precise definition of this property will come later.) C P D B l A 275 7.3. BASIC RESULTS IN HYPERBOLIC GEOMETRY From P drop a perpendicular to l at Q as shown. Consider the hyperbolic angle ∠QP T , where T is a point on the hyperbolic ray from P to B. This angle will be called the angle of parallelism for l at P . C D P T Q B l A Pole(AB) Exercise 7.2.4. Considering the figure above, explain why the angle made by QP T (the angle of parallelism) cannot be a right angle. Then use this result, and the fact that AD and BC are limiting parallels, to show that the angle of parallelism cannot be greater than a right angle. 7.3 Basic Results in Hyperbolic Geometry We will now look at some basic results concerning lines, triangles, circles, and the like, that hold in all models of hyperbolic geometry. Just as we use diagrams to aid in understanding the proofs of results in Euclidean geometry, we will use the Poincaré model (or the Klein model) to draw diagrams to aid in understanding hyperbolic geometry. However, we must be careful. Too much reliance on figures and diagrams can lead to hidden assumptions. We must be careful to argue solely from the postulates or from theorems based on the postulates. One aid in our study of hyperbolic geometry will be the fact that all results in Euclidean geometry that do not depend on the parallel postulate (those of neutral geometry) can be assumed in hyperbolic geometry immediately. For example, we can assume that results about congruence of triangles, such as SAS, will hold in hyperbolic geometry. In fact, we can assume the first 28 propositions in Book I of Euclid (see Appendix A). Also, we can assume results on isometries, including reflections and rotations, found in sections 5.1, 5.2, and 5.4, as they do not depend on the parallel postulate. These results will hold in hyperbolic geometry, assuming that we have a distance function that is well defined. We also assume basic