Analyzing a Novel Expertise: An Unmarked Road
advertisement

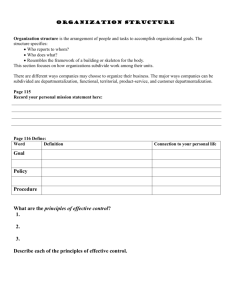
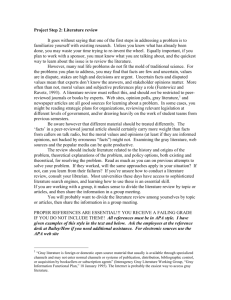
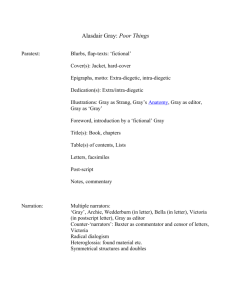
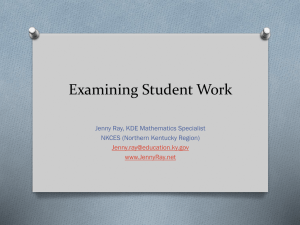
Running Head: Analyzing A Novel Expertise Analyzing a Novel Expertise: An Unmarked Road Wayne D. Gray George Mason University & Susan S. Kirschenbaum Naval Undersea Warfare Center Division Newport Gray, W. D., & Kirschenbaum, S. S. (in press). Analyzing a novel expertise: An unmarked road. In J. M. C. Schraagen, S. F. Chipman, & V. L. Shalin (Eds.), Cognitive task analysis . Mahwah, NJ: Erlbaum. Please send all correspondence to: Wayne D. Gray George Mason University MSN 3f5 Fairfax, VA 22030 1-703-993-1357 gray@gmu.edu Gray & Kirschenbaum Analyzing a Novel Expertise page 2 Analyzing a Novel Expertise: An Unmarked Road There are many varieties of task analysis-each with its advantages and disadvantages, each with its adherents and detractors (e.g. see the recent collections published by Annett & Stanton, 1998; Kirwan & Ainsworth, 1992). Most published descriptions focus on how to apply the technique or why it is a good technique to apply. Few accounts written by advocates of a technique are specifically directed at problems and pitfalls in applying the technique. This account is different. Although we are unabashedly enthusiastic advocates of the theory-driven combination of task analysis and protocol analysis that we employ, we hope that by identifying problems and obstacles that we encountered that more people will be better prepared and, therefore, more successful at applying these techniques. Beware—knowing that the road is narrow, winding, and unmarked does not make the trip easy. It might, however, discourage someone from setting out in the family sedan. For those who are better equipped, knowledge of the hazards ahead may help them avoid blindly plunging forward into a known problem. It is in this spirit that we write this chapter. The following section provides a brief overview of the techniques we employ. It then introduces the known obstacles to these techniques. The main part of the chapter discusses these obstacles in the context of a specific project—Project Nemo. Theory-Driven Task Analysis and Protocol Analysis Theory-driven task analysis decomposes the procedural and declarative knowledge required to perform a task into components supported by the theory. With some additional work on the part of the analyst, the control structure provided by the theory can use the elements of the analysis Gray & Kirschenbaum Analyzing a Novel Expertise page 3 to form a model of how a user performs the task. Theories with weak or rigid control structures, such as keystroke-level GOMS or CPM-GOMS (for an overview, see John & Kieras, 1996a; John & Kieras, 1996b), may produce models that are only capable of performing the exact task that was analyzed. Theories with more powerful control structures, such as NGOMSL, ACT-R, Soar, or EPIC (see Gray, Young, & Kirschenbaum, 1997b), may respond adaptively to perform variations of the analyzed task. Cognitive theories provide constraints to the final form of the analysis—that is, for how the components must fit together. However, the components per se vary widely, and the analysis of expertise into such components is an underconstrained problem. For example, the expertise exhibited by a chess master in plotting his next move is different from that shown by a medical expert diagnosing a rare disease (VanLehn, 1989). Once the components (i.e., the knowledge structures and strategies) of expertise have been delineated, they can be cast into the mechanisms of a cognitive theory. However, existing cognitive theory provides few a priori constraints for deriving the components of a hitherto unstudied expertise. Given a rare form of expertise, one that has been subject to few published reports (Kirschenbaum, 1990; 1992; 1994), how does the analyst proceed? The method adopted here is a form of bootstrapping. As shown in Figure 1, an initial task analysis1 guides a protocol analysis. The task analysis is revised and used as the basis of the next round of protocol analysis. When the analyst deems that the results of the analysis are as good as the existing data permit, the analyst moves to the next phase of the effort. Gray & Kirschenbaum Analyzing a Novel Expertise page 4 Initial Task Analysis Protocol Analysis Results of Analysis As good as the data permit? No Revise Task Analysis Yes Next Phase Figure 1: Bootstrapping The story told in this chapter is the story of an iterative loop around the stages shown in Figure 1. The project has now moved to the next phase. The story of the next phase is ongoing; its outlines are given in Ehret, Kirschenbaum, and Gray (1998) and Ehret, Gray, and Kirschenbaum (1999). Dead Ends and Wrong Turns Studying an expertise that has not been extensively analyzed is like traveling on an unmarked Gray & Kirschenbaum Analyzing a Novel Expertise page 5 road – one with many intersections and forks. What aspects of the expertise are important for the goals of the analysis? Can knowledge of the components of other expertise guide and inform the current analysis or does this knowledge serve to lead us astray? If the expertise is a dynamic expertise – problem solving that takes place over a period of time and that is responsive to events in the environment – what is the best way to capture key aspects of the expertise without distorting it due to artifacts of data collection? These problems are common in analyzing expertise. Indeed, others have warned that an almost inevitable danger of doing the first, deep-level cognitive analysis of a hitherto unstudied expertise is that “the final interpretation of the data and its matching against the theory [i.e., task analysis] may appear to reflect mainly hindsight – pulling out of the data the hypotheses that have been implicitly hidden in it by the data interpretation process” (Ericsson & Simon, 1993, p. 286). Although we have read (and heeded) the warnings, what we have not read is a detailed discussion by analysts of their encounters with problems that threaten the validity of their conclusions. This chapter fills that void. In it, we provide an autobiographic description of the problems encountered in our analyses for Project Nemo. We feel no shame at admitting to having problems. Indeed, when the road is rocky and unmarked, problems must be expected. The shame lies not in having problems, but in not recognizing problems. The shame falls to the analyst who mistakes a dead end for the end of the trip or a wrong turn for the right path. The Task and Our Goals in Analyzing It Different cognitive task analyses may have different goals. The goal of Project Nemo was to analyze the knowledge and cognitive processes used by submarine approach officers (AOs) as Gray & Kirschenbaum Analyzing a Novel Expertise page 6 they tried to localize an enemy submarine hiding in deep waters. The project is a collaboration between a navy and a university researcher. An important role played by the navy researcher was to feed the results of the project, as they came in, to those parts of the submarine research community that could make the most use of them. From the beginning of the project, the most interested parties have been the designers of the command workstation for the next-generation submarine. Knowing that the results of the analysis would be used for interface design provided an important constraint on the knowledge and cognitive processes that Project Nemo analyzed. The AO possesses specialized knowledge that is acquired over a 20-year period. Rather than focus on the acquisition, depth, and breadth of this knowledge, we focused on how it is used as the AO makes progress in his goal of localizing the enemy submarine. Our effort focused on the knowledge, structures, and strategies unique to the dynamic problem-solving process of localizing an enemy submarine hiding in deep water.2 Any given task takes place in the context of the artifacts and organization used to perform the task. The goal of many task analyses, including most GOMS analyses, is to analyze task interactions at this activity level. Such analyses can either assess the problems with the current way of performing the task or provide specifications for a new system. The goal of the current analysis is different. We are neither involved in critiquing the current system nor directly involved in designing the new system. Rather, our intent is to provide the designers of the new system with a detailed description of the information processing performed by the AO as he Gray & Kirschenbaum Analyzing a Novel Expertise page 7 localizes an enemy submarine. Hence, in our analysis, we seek to abstract from the activity level to the functional level (Gray, John, & Atwood, 1993, pp. 244-257). Issues We had two sets of problems in understanding AO expertise. The first set included issues in understanding the control structure of the cognitive processes used by the AO to perform the localizing task. The second set entailed understanding the nature and limits to the data we had collected. The Control Structure of AO Expertise A common metaphor is to conceptualize problem solving as search in a problem space (Newell & Simon, 1972). Tasks involving expertise are often thought of as being both wide and deep. At each step in the problem space, there are many alternative next steps (width). Solving a problem involves solving many subproblems, and each subproblem can be decomposed into another subproblem that needs to be solved (depth). In contrast to expertise, the accepted wisdom is that, for everyday tasks, the search space is limited. The problem spaces for everyday tasks are either shallow and wide (like choosing a flavor from the menu in an ice cream store) or narrow and deep (like following a recipe from a cookbook) (Norman, 1989). Clearly, localizing targets hiding in deep water is not an everyday activity. Therefore, we reasoned that rather than being shallow and wide or narrow and deep that the AOs’ expertise must be both wide and deep. This bias led us to make our first and most fundamental mistake regarding the control structure of the AOs’ cognitive processes for this task. Gray & Kirschenbaum Analyzing a Novel Expertise page 8 Matrix? Subgoals? One of the most basic control structures used in cognitive task analysis is hierarchical, or goalsubgoal, decomposition. From discussions with experts, however, it was clear that AOs kept track of many different pieces of several different tasks. Hence, a classic, hierarchical control structure did not seem accurate. Our alternative was a matrix goal structure. Although we abandoned the matrix notion before working out the details, its basic elements were as follows. Imagine a cube with AO goals along the x axis, information elements about the target, own ship, and ocean conditions along the y axis, and rules that capture the AOs’ procedural knowledge along the z axis. A given rule would yield information regarding one or more information element. In turn, a given information element would be applicable to one or more AO goals. In such a system, one could imagine that the rules that fired (i.e., the actions that the AOs take) would be those rules that yielded the greatest amount of new information for the greatest number of AO goals. Unfortunately, for our preconceptions, we found little in our data that would support a matrix organization. We gradually abandoned this idea and, for a while, ignored this issue to concentrate on the issue of how and why one rule rather than another is selected. Our explorations of these control structure issues led us, albeit a bit unwillingly, to the realization that most AO actions could be characterized as small steps in a shallow goal hierarchy. However, unlike the everyday task of choosing one flavor from a wide but shallow ice cream store menu, AOs make many successive choices. It is the nature of these successive choices that characterize the AOs’ procedural expertise. Gray & Kirschenbaum Analyzing a Novel Expertise page 9 Our current theory of how AOs solve the localizing problem can be summarized by the rather awkward phrase “schema-directed problem solving with shallow and adaptive subgoaling” (SDPSSAS). The schema is the task-relevant knowledge accumulated over 20 years of experience as a submariner (half of it at sea). It is a knowledge structure3 that contains both declarative and procedural knowledge. An implication of shallow subgoaling is that the knowledge available to AOs is so rich that the steps required to supplement this knowledge can be fairly shallow. The second implication is that the problem the AO is constantly solving is “what is the state of the world – NOW” (where NOW is somewhere on the order of 30 to 300 s). The AO is trying to find a quiet target hiding in a noisy environment while remaining covert and undetected himself. What we see him doing is taking short steps that either (a) assess the noise from the environment or signal from the target – NOW, or (b) attempt to reduce the noise or increase the signal from the target by maneuvering own ship. As shown in Figure 2, these short steps result in shallow subgoaling. When a subgoal pops, the schema is reassessed. The result of this reassessment directs the next step (i.e., selects the next subgoal). This step is accomplished, it returns information to the schema, the schema is reassessed, and so on The process of subgoaling is adaptive in two senses. First, the subgoal that is chosen next reflects the current reassessment of the schema. Second, this choice is sensitive to both the longterm importance of the subgoal as well as its recent history of success or failure. Regardless of a goal’s long-term importance, AOs will not continue to attempt a goal if successive tries fail. Instead, they will choose another goal and return to the more important goal later.4 Gray & Kirschenbaum Analyzing a Novel Expertise page 10 The dynamic aspect of the AO's task plays an important role in this view of schema-directed problem solving with shallow and adaptive subgoaling. First, the state of the AO's world is continually changing – both own ship and target are moving at a given depth, direction, and speed. For own ship, the value of these attributes can be changed, but neither own ship nor the target can be stopped. Consequently, time is an important part of the picture. Second, subgoals are not accomplished once and then discarded. In the AO's world, subgoals bring in certain types of information or accomplish certain changes to own ship. As the world changes, any given subgoal may be revisited (e.g., DET-BEARING in Figure 2). LOCATESUB (t) DETBEARING LOCATESUB (t+1) EVALSNR LOCATESUB (t+2) LOCATESUB (t+3) SETTRACKER LOCATESUB (t+4) DETBEARING LOCATESUB (t+n) TMA-SOL Time (t) Figure 2: Schema-Directed Problem-Solving with Shallow and Adaptive Subgoaling (SDPSSAS) Choosing What to Do Next: Goal-Driven? Event-Driven? When we put aside the issue of the larger organization of the AO's actions – subgoal or matrix (at this point, we had not hit on SDPSSAS) – we focused on the more local issue of how or why an individual rule was chosen. For problems such as arithmetic, physics problems, and Tower of Hanoi, the pacing of the solution is entirely under the control of the person solving the problem. The problem can be decomposed into a deep and increasingly wide series of goals and subgoals. Gray & Kirschenbaum Analyzing a Novel Expertise page 11 At any given place in this goal-subgoal hierarchy, the action chosen next completely depends on the plans and knowledge of the problem solver. Such tasks are said to be goal-driven. We recognized from the beginning that the AO’s problem is not simply goal-driven in that the problem state changes without the intervention of the person. Some part of what the AO does is clearly an event-driven process. The issue is not event-driven versus goal-driven, but what combination of the two controls the AO's problem-solving behavior and how this combination can be represented in a cognitively plausible manner. As we were struggling with the goal-driven versus event-driven interpretations, we were having problems supporting another early idea – localizing a target as a diagnostic process. The literature suggests that an important first stage in solving many tasks is diagnosing the problem. This stage ends when the correct schema is selected (VanLehn, 1989). We fully expected that the first stage of localizing the target would entail diagnosing the situation to determine the correct target-finding schema. Indeed, for about the first 18 months, our encodings had a goal called IDENTIFY-POSSIBLE-INITIAL-SCHEMA. Believing that the “absence of evidence is not evidence of absence,” we struggled mightily to find support for a diagnostic process. However, we could not find evidence in our protocols or elsewhere (e.g., from any of the other AOs and experts whom we consulted) that we could interpret as evidence that schema selection required extended deliberation. Our tenacity in clinging to the notion of schema selection is, in part, attributable to evidence that suggested that AOs used different schemas when the target was a submarine than when the target was a merchant. Unfortunately, this evidence turned out to be bogus. Gray & Kirschenbaum Analyzing a Novel Expertise page 12 In brief, our analyses indicate that when LOCATE-MERCHANT was the goal, fewer subgoals were pushed and popped than when LOCATE-SUBMARINE was the goal (see the left side of Figure 3). More important, most of the subgoals for LOCATE-MERCHANT were similar to, but qualitatively different from, those for LOCATE-SUBMARINE. As discussed later, what turned out to be bogus was the apparent qualitative difference between similar subgoals for different goals. Once this spurious qualitative difference was eliminated, we concluded that the same LOCALIZE-THE-TARGET schema guided the processing of localizing either a hostile submarine or a friendly merchant. This conclusion converged with our failure to find any evidence of schema selection. We currently believe that schema selection is not a problem. Whether the goal is LOCATE-SUBMARINE or LOCATE-MERCHANT, our expert AOs have one schema, LOCALIZE-THE-TARGET, that is automatically chosen. Schema-directed Problem Solving Conceptualizing the AOs’ task as schema instantiation, not selection, was the key to a parsimonious account of the general structure of the AOs’ cognitive processes. Localizing the target was not driven by goals or events, but was directed by a schema. The data gathered were used to instantiate attributes of this schema. On each cycle of problem solving, the schema was reevaluated, the currently most critical attribute-value pair was identified, and instantiating this pair became the current subgoal. New events were incorporated into the schema and affect problem solving only to the extent that they affect the identification of the currently most critical attribute-value pair. Gray & Kirschenbaum Analyzing a Novel Expertise page 13 subgoal per goal operators per subgoal 8 number 6 4 2 0 LOC-MERC LOC-SUB LOC-MERC LOC-SUB Figure 3: Mean number of subgoals per goal (left two) and mean number of operators per subgoal (right two) for LOCALIZE-MERC and LOCALIZE-SUB. Also shown are the 95% confidence intervals for the standard error of the mean. This view of schema instantiation as schema-directed problem solving fits in nicely with our emerging awareness of shallow subgoaling. Each time the AO returned to the top-level goal (LOCATE-SUBMARINE in Figure 2), the schema was reevaluated. The subgoal chosen was one that would return information regarding one attribute-value pair. Hence, localizing a target is a wide and shallow task. The width is represented by a well-learned schema. The shallowness is represented by shallow subgoaling. Localizing the target involves dozens of iterations of schema evaluation and shallow subgoaling. These iterations continue until the AO has confidence that the schema as currently instantiated provides accurate information regarding the target’s location. Gray & Kirschenbaum Analyzing a Novel Expertise page 14 Data Analysis: Levels of Analysis and Limits to the Data Changes in our taxonomy of goals, subgoals, and operators were driven by three sources: our changing understanding of the general structure of AO cognition (discussed earlier), our failure to understand the limits to our data (discussed next), and our tendency to embed specifics of interacting with the simulation in our analysis of the task – that is, a failure to distinguish between task and artifact (discussed later). Distinctions Not Supported Our final encodings resulted in nine categories of operators (Gray, Kirschenbaum, & Ehret, 1997a; Kirschenbaum, Gray, & Ehret, 1997). Each of these categories can be considered as representing many subcategories. For example, at one time, we tried to distinguish subcategories of things that could be queried and sources from which information could be received. An AO could query a display, the own ship operator5, his own memory, an instrument reading, and so on. Likewise, information could be received from long-term memory, from short-term memory, from reading a table, from viewing a graphic, from inferring a relationship among other information, from the own ship operator, and so on. At one time or another, each of these subcategories was considered – if only briefly – as a candidate for inclusion in the analysis. In deriving our encoding categories, we focused on two transcripts, one from each of two AOs. New encoding categories could be proposed by any of our three encoders. Typically, the encoder would present a rationale for why the subcategory was needed, along with a particular instance from the transcript that the encoder felt represented that subcategory. If the other two encoders were convinced by the instance, much discussion would be spent defining criteria by which other instances could be identified. Two or three of the encoders would together go through one of the Gray & Kirschenbaum Analyzing a Novel Expertise page 15 two sample transcripts. New instances of the encoding category would be identified and debated until consensus was achieved. After this, two or three of the encoders would independently go through the other sample transcript in an attempt to identify instances of the new category. More often than not, each independent encoding would yield a handful of instances (out of about 300 encoded operators) that could be considered members of the new category. However, there would be little or no agreement about which encodings were exemplars of the new category and which were not. At this point, the candidate would be abandoned. We considered it a plausible distinction, but a distinction for which the data were at too coarse of a level to support. Problem Solving the Tool as Opposed to Problem Solving the Task We collected data from AOs who localized targets presented on a dynamic simulation of the ocean environment – CSEAL (for more information, see Gray et al., 1997a; or Kirschenbaum et al., 1997). However, our task was not to describe how AOs’ used the simulation (the artifact or tool) to localize the target (the task), but to separate the specifics of the simulation from the more general aspects of their problem-solving process (i.e., a functional level of analysis). Time and again, we found ourselves encoding specifics of using the simulator to localize targets rather than simply localizing targets. We attempted to encode every segment of the transcript, but realized early on that a significant number of segments simply had nothing to do with the problem. The fact that many of the segments in a verbal protocol have nothing to do with the problem being solved is not news and, indeed, we expected this. These NAs (not applicable) were easy to identify because they represented comments about the desirability of eating lunch soon, the drive to the base, the Gray & Kirschenbaum Analyzing a Novel Expertise page 16 weather, the room in which the simulation was run, and so on. Of the 2,882 segments encoded, 946 were in this NA category. More difficult to distinguish were the segments that did not refer to solving the problem but to some aspect of the simulation. An analogy to this is talking to a co-author about how to format a table in Microsoft Word™ as opposed to discussing the data that would go into the table. A simple example is represented by the following query from the AO to the own ship operator asking about the units (relative or true) in which a particular display represented the data. Protocol: “and so this [display] is relative or true? (AO points to TB16 block)?” At some point, we realized that what we were seeing was a ubiquitous phenomenon that was not limited to our paradigm, but that represented a type of usability issue. We saw this as problem solving in the tool space, as opposed to the task space, and proposed the tool:task ratio as a usability metric (Kirschenbaum, Gray, Ehret & Miller, 1996). Following this insight, our transcripts were recoded with a new operator, instrumentation. As per the prior example, most of the instrumentation operators were found in groups of one to three amid a series of task operators. These small groups of instrumentation operators are essentially asides that are embedded among operators concerned with a particular task goal. Occasionally, both the AO and the own ship operator abandoned the task of localizing the target and became engaged in an episode of collaborative problem solving – attempting to figure out how to get the simulation to take a particular input or to display a particular type of data. Such episodes were recoded as a new goal – that of supervising the use of the tool (supervisory). Gray & Kirschenbaum Analyzing a Novel Expertise page 17 Over our entire set of encoded data, 421 goals and 2,882 operators were required to encode the nine scenarios from our six AOs (for more details, see Gray, Kirschenbaum, et al., 1997 or Kirschenbaum et al., 1997). After removing all supervisory goals, their operators, all instrumentation operators, and all NA operators, we were left with 397 goals and 1,269 operators. We refer to this remainder as our clean set. The clean set of encodings was used in all subsequent analyses. The significance of this reduction cannot be overstated; over half of our encoded utterances had nothing to do with localizing per se. Having these in the analyses confounded our efforts to make sense of the data. Once these were removed, regularities that had been obscured became apparent. For example, the scenarios we studied involved two targets: a hostile submarine and a friendly merchant. Given the shallow subgoaling we were beginning to believe in, it made sense to us that there would be more subgoals involved in localizing the quiet submarine than in localizing the noisy merchant. Indeed, this is what our encodings suggested (see the left two data points in Figure 3). However, the same subgoal seemed to involve many more steps if its supergoal was LOCATE-SUBMARINE rather than LOCATE-MERCHANT. More steps were needed for a subgoal such as determine the signal-to-noise ratio (determineSNR) when determine-SNR was a subgoal of LOCATE-SUBMARINE than when it was a subgoal of LOCATE-MERCHANT, and this did not seem unreasonable. Indeed, as discussed earlier, such differences supported our belief that different schemas were used for different targets. By inference, this finding supported the belief that schema selection was an important component of the AO's problem-solving process. Gray & Kirschenbaum Analyzing a Novel Expertise page 18 However, once the instrumentation operators and supervisory goals were removed, regularities appeared. As shown in the right two data points of Figure 3, the subgoals used in LOCATEMERCHANT required the same number of operators as the subgoal of LOCATESUBMARINE. (An extended discussion of this point is provided in both Gray et al., 1997a; and Kirschenbaum et al., 1997.) Completed versus Successful Goals Another part of our struggle to define the number of levels and depth of the goal stack resulted from an implicit assumption that a completed goal was synonymous with a successful goal. In our initial attempts to shoehorn reality, we viewed a completed goal as one that returned the information queried. For example, if the AO queried the bearing rate on a particular target, this goal would not be completed until the target’s bearing rate was determined. Attempting to trace the path from initial query to completion led us to postulate a tangled web of semi-infinite subgoaling. Stepping back and listening to the data led to a different conclusion. We discovered that, for the AO, knowing that, at a given point in time under current conditions, the bearing rate (or course, speed, etc.) cannot be determined is an important and complete piece of information. The insight that a goal can be considered completed without being considered successful supports the shallow subgoaling component of schema-directed problem-solving. The AO launches a continuing stream of short queries. Each query returns some information. In the early stages of localizing (immediately after the target has been detected), the information typically is something such as the data are too noisy to answer that question (the SNR is literally too low). This leads the AO to take actions to increase the SNR. Gray & Kirschenbaum Analyzing a Novel Expertise page 19 Summary of Issues Understanding the control structure of the AOs’ cognition, together with understanding the nature and limits of the data, were major obstacles in our attempts to do a cognitive analysis of the AOs’ task. Before beginning this project, we knew that understanding the control structure of cognition would be the key to the cognitive task analysis (this concern was reflected in the original proposal to ONR). At each iteration around the loop (see Figure 1), each component of our analysis seemed plausible. What troubled us were our efforts to fit the parts together into a coherent whole. Although during this period we were not building ACT-R models, we were constantly asking ourselves how the disparate parts could fit into an ACT-R model. It was the failure to answer this question positively that kept driving us around the loop and deeper into the data. At this point, we have exited the loop (Figure 1) and moved onto the next phase of the project. Although the current hypothesis – schema-directed problem solving with shallow and adaptive subgoaling – is coherent, we are collecting additional data in the hopes of capturing finer grained data on key aspects of AO problem solving in a dynamic environment. Conclusions The current chapter has concentrated on the difficulties of doing a deep-level cognitive task analysis of a novel expertise. The difficulties are all the more notable in that our team of researchers brought to the study considerable expertise in cognitive theory and in applying cognitive theory to real-world tasks. Prior to working on Project Nemo, the co-authors of this chapter conducted research on COBOL programmers, HAWK Air Defense maintenance workers, Gray & Kirschenbaum Analyzing a Novel Expertise page 20 small-unit tactical team training, phone company operators, as well as more traditional decisionmaking studies of submariners and school children. Although the road was difficult and unmarked, we have arrived at our destination. Our current characterization of the AOs’ expertise – schema-directed problem solving with shallow and adaptive subgoaling – is both simpler and more profound than what we had envisioned when we began our journey. As far as we can tell, this characterization is unlike any that appears in the literature on expert performance. As such, it is important that those who are designing the command workstation understand this characterization of the AOs’ expertise rather than designing an interface that will support the consideration of multiple hypotheses (as in medical diagnoses) or the in-depth exploration of several alternative courses of action (as in chess playing). Instead of telling stories about how difficult our trip was, we would rather give the reader a sure-fire guide to plotting a safe path to any destination, on any road, marked or unmarked. We do not know if such a guide can be written. However, we are sure that we cannot write one. Unfortunately, the truth remains that, whatever may be done differently, the task of understanding a hitherto unstudied expertise will never be quick or easy. The problems discussed in this chapter can be anticipated but not avoided. Notes Acknowledgment More than usual, we thank our agency sponsors and our scientific officer for understanding that if we knew what we were doing, it would not be called research. We believe that the emerging Gray & Kirschenbaum Analyzing a Novel Expertise page 21 results justify their long-term support of this effort. However, we also understand that there were times when they might have thought that a successful outcome was unlikely. We thank Brian D. Ehret who joined our project about two thirds of the way through the events recounted here. Brian was the third encoder on each of the final encodings of the transcripts. His diagnoses have guided the current phase of data collection. The work on this project at George Mason University was supported by a grant from the Office of Naval Research (#N00014-95-1-0175) to Wayne D. Gray. Susan S. Kirschenbaum’s work has been jointly sponsored by Office of Naval Research (ONR) (Program element 61153N) and by Naval Undersea Warfare Center's Independent Research Program as Project A10328. Authors present address Wayne D. Gray can be reached at Human Factors and Applied Cognitive Program, George Mason University, MSN 3f5, Fairfax, VA 22030, USA. E-Mail: gray@gmu.edu. Susan S. Kirschenbaum can be reached at Naval Undersea Warfare Center Division Newport, 1176 Howell St., Code 2211, Building 1171/1, Newport, RI 02841-1708, USA. Email: kirschenbaumss@csd.npt.nuwc.navy.mil. End Notes 1 The initial task analysis can be as informal as it has to be, but should be as formal as possible. For Project Nemo, the initial task analysis was based on the published literature (Kirschenbaum, 1990; 1992; 1994). 2 After a target is detected, it must be localized. Detection tells the AO that a target is out there. Localizing tells him where it is in terms of bearing from own ship, range, course, and Gray & Kirschenbaum Analyzing a Novel Expertise page 22 speed. Due, in part, to the physics of sound transmission underwater and the need to remain covert, localizing a target is a mathematically underconstrained problem. Passive sonar is the only tool available to the AO. From passive sonar, the AO can directly compute the bearing of the target. Computing the target’s range, course, and speed is a difficult process. 3 As we think of the schema in terms of ACT-R mechanisms, the schema would be a body of task-specific, declarative memory elements and productions. Any given declarative memory element is relatively small and limited. However, the set of task-relevant, declarative memory elements have high interitem association values (see Anderson & Lebiére, 1998). 4 As described by Lovett (1998), this adaptive subgoaling can be modeled in ACT-R 4.0 as the temporary depression and recovery of the expected value of a goal. 5 The simulation required extensive training to operate. Rather than teaching AOs this esoteric task, the simulation was run by an experimenter in the role of own ship operator. This arrangement mimicked procedures onboard submarines and was acceptable to all of the AOs. References Anderson, J. R., & Lebiére, C. (Eds.). (1998). Atomic components of thought. Hillsdale, NJ: Erlbaum. Annett, J., & Stanton, N. (1998). Introduction to this Special Issue on Task Analysis. Ergonomics, 41(11), 1529-1536. Ehret, B. D., Gray, W. D., & Kirschenbaum, S. S. (1999). Scaled worlds and computational cognitive models as tools to increase the usefulness of cognitive task analysis. manuscript submitted for publication. Gray & Kirschenbaum Analyzing a Novel Expertise page 23 Ehret, B. D., Kirschenbaum, S. S., & Gray, W. D. (1998). Contending with complexity: the development and use of scaled worlds as research tools, Human Factors and Ergonomics Society 42th Annual Meeting . Santa Monica, CA: Human Factors and Ergonomics Society. Ericsson, K. A., & Simon, H. A. (1993). Protocol analysis: Verbal reports as data. (Revised ed.). Cambridge, MA: The MIT Press. Gray, W. D., John, B. E., & Atwood, M. E. (1993). Project Ernestine: Validating a GOMS analysis for predicting and explaining real-world performance. Human-Computer Interaction, 8(3), 237-309. Gray, W. D., Kirschenbaum, S. S., & Ehret, B. D. (1997a). The précis of Project Nemo, phase 1: Subgoaling and subschemas for submariners, Nineteenth Annual Conference of the Cognitive Science Society (pp. 283-288). Hillsdale, NJ: Erlbaum. Gray, W. D., Young, R. M., & Kirschenbaum, S. S. (1997b). Introduction to this Special Issue on Cognitive Architectures and Human-Computer Interaction. Human-Computer Interaction, 12(4), 301-309. John, B. E., & Kieras, D. E. (1996a). The GOMS family of user interface analysis techniques: Comparison and contrast. ACM Transactions on Computer-Human Interaction, 3(4), 320351. John, B. E., & Kieras, D. E. (1996b). Using GOMS for user interface design and evaluation: Which technique? ACM Transactions on Computer-Human Interaction, 3(4), 287-319. Kirschenbaum, S. S. (1990). Command Decision Making: Lessons Learned (NUSC TM No. Gray & Kirschenbaum Analyzing a Novel Expertise page 24 902149): Naval Underwater Systems Center. Kirschenbaum, S. S. (1992). The effect of level of experience on information gathering strategies. Journal of Applied Psychology, 77, 343-352. Kirschenbaum, S. S. (1994). Command Decision-Making: A Simulation Study (Technical Report 10,350): Naval Undersea Warfare Center Division Newport. Kirschenbaum, S. S., Gray, W. D., & Ehret, B. D. (1997). Subgoaling and subschemas for submariners: Cognitive models of situation assessment (Technical Report 10,764-1). Newport, RI: NUWC-NPT. Kirwan, B., & Ainsworth, L. K. (Eds.). (1992). A guide to task analysis. Washington, DC: Taylor & Francis. Lovett, M. (1998). Choice. In J. R. Anderson & C. Lebiére (Eds.), Atomic components of thought (pp. 255-296). Hillsdale, NJ: Erlbaum. Newell, A., & Simon, H. A. (1972). Human problem solving. Englewood Cliffs, NJ: PrenticeHall, Inc. Norman, D. A. (1989). The design of everyday things. New York: DoubleDay. VanLehn, K. (1989). Problem solving and cognitive skill acquisition. In M. I. Posner (Ed.), Foundations of Cognitive Science (pp. 527-579). Cambridge, MA: The MIT Press.