Loss Control in Behavioural Portfolio Selection Dr. Hanqing Jin Mathematical Institute
advertisement

Loss Control in Behavioural Portfolio Selection
Dr. Hanqing Jin
A Joint work with Xun Yu Zhou and Song Zhang
Mathematical Institute
&
Oxford-Man Institute of Quantitative Finance
University of Oxford
Loss Control in Behavioural Portfolio Selection – p. 1/27
Behavioural Preference
• Reference point B
• S -shaped utility u(·): u(x) = u+ (x+ ) − u− (x− ) with u± (·)
concave, ↑ and u± (0) = 0
• Probability distortion T± (·): T± (0) = 0, T± (1) = 1, ↑
Loss Control in Behavioural Portfolio Selection – p. 2/27
Behavioural Preference
• Reference point B
• S -shaped utility u(·): u(x) = u+ (x+ ) − u− (x− ) with u± (·)
concave, ↑ and u± (0) = 0
• Probability distortion T± (·): T± (0) = 0, T± (1) = 1, ↑
• Behavioural criterion: for a r.v. Y ,
V (Y ) =
Z
+∞
u(y)d[−T+ (P (Y ≥ y))] +
0
Z
0
u(y)d[T− (P (Y ≤ y))]
−∞
Loss Control in Behavioural Portfolio Selection – p. 2/27
Behavioural Preference
• Reference point B
• S -shaped utility u(·): u(x) = u+ (x+ ) − u− (x− ) with u± (·)
concave, ↑ and u± (0) = 0
• Probability distortion T± (·): T± (0) = 0, T± (1) = 1, ↑
• Behavioural criterion: for a r.v. Y ,
V (Y ) =
Z
+∞
Z
+∞
u(y)d[−T+ (P (Y ≥ y))] +
0
=
0
T+ (P (u+ (Y + ) ≥ y))dy −
Z
0
u(y)d[T− (P (Y ≤ y))]
−∞
Z +∞
T− (P (u− (Y − ) ≥ y))dy
0
Loss Control in Behavioural Portfolio Selection – p. 2/27
Behavioural Preference
• Reference point B
• S -shaped utility u(·): u(x) = u+ (x+ ) − u− (x− ) with u± (·)
concave, ↑ and u± (0) = 0
• Probability distortion T± (·): T± (0) = 0, T± (1) = 1, ↑
• Behavioural criterion: for a r.v. Y ,
V (Y ) =
Z
+∞
Z
+∞
u(y)d[−T+ (P (Y ≥ y))] +
0
=
0
T+ (P (u+ (Y + ) ≥ y))dy −
Z
0
u(y)d[T− (P (Y ≤ y))]
−∞
Z +∞
T− (P (u− (Y − ) ≥ y))dy
0
• Behavioural Preference: compare V (X − B)
Loss Control in Behavioural Portfolio Selection – p. 2/27
Continuous time portfolio selection
• A market in a finite time horizon: t ∈ [0, T ]
• Arbitrage free and complete with pricing kernel ρt
Loss Control in Behavioural Portfolio Selection – p. 3/27
Continuous time portfolio selection
• A market in a finite time horizon: t ∈ [0, T ]
• Arbitrage free and complete with pricing kernel ρt
◦ A contingent claim ξ at time T is obtainable from initial
wealth x0 if and only if
• lower bounded, E[ξρT ] ≤ x0 .
Loss Control in Behavioural Portfolio Selection – p. 3/27
Continuous time portfolio selection
• A market in a finite time horizon: t ∈ [0, T ]
• Arbitrage free and complete with pricing kernel ρt
◦ A contingent claim ξ at time T is obtainable from initial
wealth x0 if and only if
• lower bounded, E[ξρT ] ≤ x0 .
◦ Black-scholes market: ρt = e
2
−(r+ (µ−r)
)t− µ−r
W (t)
σ
2σ 2
.
Loss Control in Behavioural Portfolio Selection – p. 3/27
Continuous time portfolio selection
• A market in a finite time horizon: t ∈ [0, T ]
• Arbitrage free and complete with pricing kernel ρt
◦ A contingent claim ξ at time T is obtainable from initial
wealth x0 if and only if
• lower bounded, E[ξρT ] ≤ x0 .
◦ Under some condition, the completeness can be
relaxed.
Loss Control in Behavioural Portfolio Selection – p. 3/27
Continuous time portfolio selection
• A market in a finite time horizon: t ∈ [0, T ]
• Arbitrage free and complete with pricing kernel ρt
◦ A contingent claim ξ at time T is obtainable from initial
wealth x0 if and only if
• lower bounded, E[ξρT ] ≤ x0 .
• Denote ρ = ρT . Portfolio selection with criterion U (·):
Maximize U(X)
X is lower bounded, X ∈ A
s.t.
E[Xρ] ≤ x0
where A is a constraint on portfolio
Loss Control in Behavioural Portfolio Selection – p. 3/27
Outline of this talk
• Unconstraint behavioural portfolio selection
• Behavioural portfolio selection with controlled loss
• Examples for the latter
Loss Control in Behavioural Portfolio Selection – p. 4/27
Behavioural portfolio selection problem
Maximize V (X − B)
X is lower bounded, X ∈ A
s.t.
E[Xρ] ≤ x0
Loss Control in Behavioural Portfolio Selection – p. 5/27
Behavioural portfolio selection problem
Maximize V (X − B)
X is lower bounded, X ∈ A
s.t.
E[Xρ] ≤ x0
Suppose the reference is lower bounded. Rewrite the problem
by changing variable X̃ = X − B ,
Maximize V+ (X̃ + ) − V− (X̃ − )
X̃ is lower bounded, X ∈ A
s.t.
E[X̃ρ] ≤ x̃0 := x0 − E[ρB]
where V± (Y ) =
R +∞
0
T± (P (u± (y) ≥ y))dy .
Loss Control in Behavioural Portfolio Selection – p. 5/27
Unconstraint case — Property of optimal solution
• Split X̃ into X̃ + − X̃ −
Loss Control in Behavioural Portfolio Selection – p. 6/27
Unconstraint case — Property of optimal solution
• Split X̃ into X̃ + − X̃ −
• Key property: Given V (X̃) only depends on the distribution
of X̃ increasingly, X̃ ∗ must be a decreasing function of ρ.
• {X̃ ∗ ≥ 0} = {ρ ≤ c∗ }, x̃∗+ := E[(X̃ ∗ )+ ρ] ≥ x̃+ .
0
Loss Control in Behavioural Portfolio Selection – p. 6/27
Unconstraint case — Property of optimal solution
• Split X̃ into X̃ + − X̃ −
• Key property: Given V (X̃) only depends on the distribution
of X̃ increasingly, X̃ ∗ must be a decreasing function of ρ.
• {X̃ ∗ ≥ 0} = {ρ ≤ c∗ }, x̃∗+ := E[(X̃ ∗ )+ ρ] ≥ x̃+ . Furthermore,
0
(X̃ ∗ )+ is optimal for
max V+ (X̃+ )
X̃+ ≥ 0
s.t.
X̃ = 0 when ρ > c∗
E[X̃+ ρ] = x̃∗+
Loss Control in Behavioural Portfolio Selection – p. 6/27
Unconstraint case — Property of optimal solution
• Split X̃ into X̃ + − X̃ −
• Key property: Given V (X̃) only depends on the distribution
of X̃ increasingly, X̃ ∗ must be a decreasing function of ρ.
• {X̃ ∗ ≥ 0} = {ρ ≤ c∗ }, x̃∗+ := E[(X̃ ∗ )+ ρ] ≥ x̃+ . Furthermore,
0
(X̃ ∗ )+ is optimal for
max V+ (X̃+ )
X̃+ ≥ 0
s.t.
X̃ = 0 when ρ > c∗
E[X̃+ ρ] = x̃∗+
(X̃ ∗ )− is optimal for
min V− (X̃− )
X̃− ≥ 0, X̃− is bounded
s.t.
X̃− = 0 when ρ < c∗
E[X̃− ρ] = x̃∗+ − x̃0
Loss Control in Behavioural Portfolio Selection – p. 6/27
Unconstraint case — Splitting
• Splitting: for any c ∈ (essinfρ, esssupρ), x̃+ ≥ x̃+ , solve the
0
following problems to get their value function v± (c, x̃+ )
max V+ (X̃+ )
X̃+ ≥ 0
s.t.
X̃ = 0 when ρ > c
E[X̃+ ρ] = x̃+
(Positive Part Problem)
min V− (X̃− )
X̃− ≥ 0, X̃− is bounded
s.t.
X̃− = 0 when ρ < c
E[X̃− ρ] = x̃+ − x̃0
(Negative Part Problem)
Loss Control in Behavioural Portfolio Selection – p. 7/27
Unconstraint case — Splitting
• Splitting: for any c ∈ (essinfρ, esssupρ), x̃+ ≥ x̃+ , solve the
0
following problems to get their value function v± (c, x̃+ )
max V+ (X̃+ )
X̃+ ≥ 0
s.t.
X̃ = 0 when ρ > c
E[X̃+ ρ] = x̃+
(Positive Part Problem)
min V− (X̃− )
X̃− ≥ 0, X̃− is bounded
s.t.
X̃− = 0 when ρ < c
E[X̃− ρ] = x̃+ − x̃0
(Negative Part Problem)
• Then find the optimal splitting c∗ and x̃∗+ by solving
Maximizec∈(essinfρ,esssupρ),x̃+ ≥x+0 v+ (c, x̃+ ) − v− (c, x̃+ ).
Loss Control in Behavioural Portfolio Selection – p. 7/27
Recovery of optimal contingent claim
• If
◦ c∗ , x̃∗+ is an optimal splitting
∗ , X̃ ∗ are optimal for the two subproblems respectively
◦ X̃+
−
with parameters c∗ , x̃∗+ ,
∗1
∗
then X = X̃+
ρ≤c∗ − X̃− 1ρ>c∗ + B is optimal
Loss Control in Behavioural Portfolio Selection – p. 8/27
Recovery of optimal contingent claim
• If
◦ c∗ , x̃∗+ is an optimal splitting
∗ , X̃ ∗ are optimal for the two subproblems respectively
◦ X̃+
−
with parameters c∗ , x̃∗+ ,
∗1
∗
then X = X̃+
ρ≤c∗ − X̃− 1ρ>c∗ + B is optimal
• If any of them fails to exist, then there is no optimal
contingent claim
Loss Control in Behavioural Portfolio Selection – p. 8/27
Positive part problem
Consider the problem
R +∞
max V+ (Y ) = 0 T+ (P (u+ (Y ) ≥ y))dy
Y ≥0
max-Y
s.t.
E[Y ρ] = a
with constant a > 0.
Loss Control in Behavioural Portfolio Selection – p. 9/27
Positive part problem
Consider the problem
R +∞
max V+ (Y ) = 0 T+ (P (u+ (Y ) ≥ y))dy
Y ≥0
max-Y
s.t.
E[Y ρ] = a
with constant a > 0.
Theorem 1
Suppose this problem admits an optimal solution Y ∗ ,
with cumulative distribution function G(·), then
Y ∗ = G−1 (1 − Fρ (ρ)), a.s.,
where Fρ (·) is the distribution function of ρ.
Loss Control in Behavioural Portfolio Selection – p. 9/27
Positive part problem
Denote Z = 1 − Fρ (ρ), then Z ∼ U (0, 1), and the problem can be
written into
max v1 (G(·)) =
s.t.
R +∞
0
T (P {u+ (G−1 (Z)) > y})dy
G(·) is a CDF with G(0) = 0
E[G−1 (Z)Fρ−1 (1 − Z)] = a
Loss Control in Behavioural Portfolio Selection – p. 10/27
Positive part problem
Denote Z = 1 − Fρ (ρ), then Z ∼ U (0, 1), and the problem can be
written into
max v1 (G(·)) =
s.t.
R +∞
0
T (P {u+ (G−1 (Z)) > y})dy
G(·) is a CDF with G(0) = 0
E[G−1 (Z)Fρ−1 (1 − Z)] = a
Change optimization variable from G(·) to g(·) = G−1 (·),
max v̄1 (g(·)) := E[u+ (g(Z))T ′ (1 − Z)]
(max-g)
s.t.
E[g(Z)Fρ−1 (1 − Z)] = a
g(·) is a qunatile function with g(0+) ≥ 0
Loss Control in Behavioural Portfolio Selection – p. 10/27
Positive part problem — The optimal solution
Assumption 1 : (1) Fρ (·) is continuous; (2)
−xu′′+ (x)
on [0, 1]; (3) lim inf u′ (x) > 0; (4)
+
x→+∞
E[u+ ((u′+ )−1 ( T ′ (Fρρ (ρ)) ))T ′ (Fρ (ρ))]<
Fρ−1 (·)
T+′ (·)
is increasing
+∞.
Loss Control in Behavioural Portfolio Selection – p. 11/27
Positive part problem — The optimal solution
Assumption 1 : (1) Fρ (·) is continuous; (2)
−xu′′+ (x)
on [0, 1]; (3) lim inf u′ (x) > 0; (4)
+
x→+∞
E[u+ ((u′+ )−1 ( T ′ (Fρρ (ρ)) ))T ′ (Fρ (ρ))]<
Theorem 2
Fρ−1 (·)
T+′ (·)
is increasing
+∞.
Suppose Assumption 1 holds. Then for any
c ∈ (essinfρ, esssupρ] and x̃+ ≥ x̃+
0 , the optimal solution for the
positive part problem is
∗
X̃+
The optimal value is
=
(u′+ )−1 (λ
ρ
)1ρ≤c .
′
T+ (F (ρ))
v+ (c, x̃+ ) = E[u+ ((u′+ )−1 (λ
ρ
′
))T
+ (F (ρ))1ρ≤c ],
′
T+ (F (ρ))
∗
feasible.
where λ is the unique one making X̃+
Loss Control in Behavioural Portfolio Selection – p. 11/27
Negative part problem — Unconstraint case
Consider the problem
(min-Y)
min V− (Y ) =
s.t.
R +∞
0
T− (P {u− (Y ) > y})dy
E[Y ρ] = a, Y ≥ 0
Loss Control in Behavioural Portfolio Selection – p. 12/27
Negative part problem — Unconstraint case
Consider the problem
(min-Y)
min V− (Y ) =
s.t.
R +∞
0
T− (P {u− (Y ) > y})dy
E[Y ρ] = a, Y ≥ 0
Similar to the positive part problem, denoting Z = Fρ (ξ), we can
translate the problem into
min v̄2 (g(·)) := E[u− (g(Z))T−′ (1 − Z)]
(min-g)
s.t.
g(·) is a quantile function with g(0+) ≥ 0
E[g(Z)Fρ−1 (Z)] = a.
Loss Control in Behavioural Portfolio Selection – p. 12/27
Negative part problem — Unconstraint case
Consider the problem
(min-Y)
min V− (Y ) =
s.t.
R +∞
0
T− (P {u− (Y ) > y})dy
E[Y ρ] = a, Y ≥ 0
Similar to the positive part problem, denoting Z = Fρ (ξ), we can
translate the problem into
min v̄2 (g(·)) := E[u− (g(Z))T−′ (1 − Z)]
(min-g)
s.t.
g(·) is a quantile function with g(0+) ≥ 0
E[g(Z)Fρ−1 (Z)] = a.
• If g ∗ (·) is optimal, then Y ∗ := g ∗ (Fρ (ρ)) is optimal
Loss Control in Behavioural Portfolio Selection – p. 12/27
Negative part problem — Unconstraint case
• Problem (min-g) is to minimize a concave objective over a
convex set
Theorem 3
If Problem (min-g) admits optimal solutions, then one
of them is in the form g(x; c) =
a
E[ρ1ρ≥c ] 1x≥Fρ (c) .
• g ∗ (·) is a two-piece step function
• Only need to solve the problem
(minV-c)
min u− ( E[ρ1aρ≥c ] )T− (P (ρ > c))
s.t.
c ∈ [essinfρ, esssupρ)
• The optimal solution Y ∗ , if exists, is automatically bounded.
Loss Control in Behavioural Portfolio Selection – p. 13/27
Negative part problem — Unconstraint case
Theorem 4
For any c ∈ [essinfρ, esssupρ), x̃+ > x̃+
0 , the optimal
value of the negative part problem is
x̃+ − x̃0
v− (c, x̃+ ) =
inf
u− (
)T− (1 − F (c2 )).
Eρ1ρ>c2
c2 ∈[c,esssupρ)
Furthermore, if c∗2 achieves the optimal value v− (c, x̃+ ), then
∗
X̃−
x̃+ − x̃0
=
1ρ≥c∗2 .
Eρ1ρ>c∗2
Loss Control in Behavioural Portfolio Selection – p. 14/27
Unconstraint case — Final optimal solution
The optimal splitting c∗ , x̃∗+ can be determined by
(sp)
x̃+ −x̃0
max v+ (c, x̃+ ) − u− ( E[ρ1
)T− (1 − F (c))
ρ>c ]
s.t.
x̃+ ≥ x̃0 , c ∈ [essinfρ, esssupρ)
Loss Control in Behavioural Portfolio Selection – p. 15/27
Unconstraint case — Final optimal solution
The optimal splitting c∗ , x̃∗+ can be determined by
(sp)
x̃+ −x̃0
max v+ (c, x̃+ ) − u− ( E[ρ1
)T− (1 − F (c))
ρ>c ]
s.t.
Theorem 5
x̃+ ≥ x̃0 , c ∈ [essinfρ, esssupρ)
Suppose Assumption 1 hold.
(i) If (c∗ , x̃∗+ ) is optimal for Problem (sp), then
∗
x̃
ρ
+ − x̃0
′ −1
∗
X = (u+ ) (λ ′
)1ρ≤c∗ −
1ρ>c∗ + B
T+ (F (ρ))
E[ρ1ρ>c∗ ]
is an optimal contingent claim.
Loss Control in Behavioural Portfolio Selection – p. 15/27
Unconstraint case — Final optimal solution
The optimal splitting c∗ , x̃∗+ can be determined by
(sp)
x̃+ −x̃0
max v+ (c, x̃+ ) − u− ( E[ρ1
)T− (1 − F (c))
ρ>c ]
s.t.
Theorem 5
x̃+ ≥ x̃0 , c ∈ [essinfρ, esssupρ)
Suppose Assumption 1 hold.
(i) If (c∗ , x̃∗+ ) is optimal for Problem (sp), then
∗
x̃
ρ
+ − x̃0
′ −1
∗
X = (u+ ) (λ ′
)1ρ≤c∗ −
1ρ>c∗ + B
T+ (F (ρ))
E[ρ1ρ>c∗ ]
is an optimal contingent claim.
(ii) If there is no optimal (c, x̃+ ), then there is no optimal
contingent claim.
Loss Control in Behavioural Portfolio Selection – p. 15/27
Loss control
• For the optimal contingent, the loss (X̃ ∗ )− , although finite,
can be very large.
Loss Control in Behavioural Portfolio Selection – p. 16/27
Loss control
• For the optimal contingent, the loss (X̃ ∗ )− , although finite,
can be very large.
• An exogenous constraint X̃ − ≤ L controls the loss. ( L is a
positive number)
Loss Control in Behavioural Portfolio Selection – p. 16/27
Loss control
• For the optimal contingent, the loss (X̃ ∗ )− , although finite,
can be very large.
• An exogenous constraint X̃ − ≤ L controls the loss. ( L is a
positive number)
• X̃ − ≤ L is the same as X ≥ B − L
◦ No bankruptcy constraint if L = B
Loss Control in Behavioural Portfolio Selection – p. 16/27
Loss control
• For the optimal contingent, the loss (X̃ ∗ )− , although finite,
can be very large.
• An exogenous constraint X̃ − ≤ L controls the loss. ( L is a
positive number)
• X̃ − ≤ L is the same as X ≥ B − L
◦ No bankruptcy constraint if L = B
• Consider the problem with controlled loss
Maximize V (X̃)
X̃ ≥ −L
s.t.
E[X̃ρ] ≤ x̃0
Loss Control in Behavioural Portfolio Selection – p. 16/27
Negative part problem
• With the controlled loss
◦ splitting of the problem still holds
Loss Control in Behavioural Portfolio Selection – p. 17/27
Negative part problem
• With the controlled loss
◦ splitting of the problem still holds
◦ positive part problem is formally the same
Loss Control in Behavioural Portfolio Selection – p. 17/27
Negative part problem
• With the controlled loss
◦ splitting of the problem still holds
◦ positive part problem is formally the same
◦ Difficulty exists in the negative part problem
min V− (X̃− )
X̃− ≥ 0, X̃− ≤ L
(cnp)
s.t.
X̃− = 0 when ρ < c
E[X̃− ρ] = x̃+ − x̃0
where (c, x̃+ ) is a splitting.
Loss Control in Behavioural Portfolio Selection – p. 17/27
Negative part problem with constraint
Consider the problem
min V− (Y )
Y ≥ 0, Y ≤ L
s.t.
E[Y ρ] = a
Loss Control in Behavioural Portfolio Selection – p. 18/27
Negative part problem with constraint
Consider the problem
min V− (Y )
Y ≥ 0, Y ≤ L
s.t.
E[Y ρ] = a
• By the same transformation, it is equivalent to solve
min v̄2 (g(·)) := E[u− (g(Z))T−′ (1 − Z)]
g(·) is a quantile function with g(0+) ≥ 0
s.t.
g(·) ≤ L on [0, 1)
E[g(Z)Fρ−1 (Z)] = a.
Loss Control in Behavioural Portfolio Selection – p. 18/27
Negative part problem with constraint
• With the constraint g(·) ≤ L, the boundary of the feasible
region changed.
Loss Control in Behavioural Portfolio Selection – p. 19/27
Negative part problem with constraint
• With the constraint g(·) ≤ L, the boundary of the feasible
region changed.
Theorem 6
If there are optimal g(·), then one of them is in the
form g(x; c1, c2 ) = q(c1 , c2 ; a)1x∈[Fρ (c1 ),Fρ (c2 )) + L1x≥Fρ (c2 ) , where
q(c1 , c2 ; a) =
a−LE[ρ1ρ≥c2 ]
E[ρ1ρ∈[c1 ,c2 ) ] .
Loss Control in Behavioural Portfolio Selection – p. 19/27
Negative part problem with constraint
• With the constraint g(·) ≤ L, the boundary of the feasible
region changed.
Theorem 6
If there are optimal g(·), then one of them is in the
form g(x; c1, c2 ) = q(c1 , c2 ; a)1x∈[Fρ (c1 ),Fρ (c2 )) + L1x≥Fρ (c2 ) , where
q(c1 , c2 ; a) =
a−LE[ρ1ρ≥c2 ]
E[ρ1ρ∈[c1 ,c2 ) ] .
L
q
Fρ (c1 )
Fρ (c2 )
Loss Control in Behavioural Portfolio Selection – p. 19/27
Negative part problem with constraint
• With the constraint g(·) ≤ L, the boundary of the feasible
region changed.
Theorem 6
If there are optimal g(·), then one of them is in the
form g(x; c1, c2 ) = q(c1 , c2 ; a)1x∈[Fρ (c1 ),Fρ (c2 )) + L1x≥Fρ (c2 ) , where
q(c1 , c2 ; a) =
a−LE[ρ1ρ≥c2 ]
E[ρ1ρ∈[c1 ,c2 ) ] .
• Only need to solve the problem
(min-c)
min v̄2 (g(·; c1 , c2 ))
s.t.
essinfρ ≤ c1 < c2 ≤ esssupρ
Loss Control in Behavioural Portfolio Selection – p. 19/27
Negative part problem with constraint
Theorem 7
For any c ∈ [essinfρ, esssupρ), x̃+ > x̃+
0 , the optimal
value of the Problem (cnp) is
where
v− (c, x̃+ ) =
inf
c≤c1 <c2 ≤esssupρ)
v3 (c1 , c2 ; c, x̃+ ),
v3 (· · · ) = u− (q(c1 , c2 , x̃+ − x̃0 ))(T− (P (ρ ≥ c2 )) − T− (P (ρ ≥ c1 )))
+u− (L)T− (P (ρ ≥ c2 )).
Furthermore, if v− (c, x+ ) is obtained at (c∗1 , c∗2 ), then
∗
= q(c∗1 , c∗2 ; x̃∗+ − x̃0 )1ρ∈[c∗1 ,c∗2 ) + L1ρ≥c∗2
X̃−
is an optimal solution for Problem (cnp).
Loss Control in Behavioural Portfolio Selection – p. 20/27
Optimal contingent with constraint
The optimal splitting c∗ , x̃∗+ can be determined by
(sp’)
max v+ (c, x̃+ ) − v3 (c, c2 ; c, x̃+ )
s.t.
x̃+ ≥ x̃0 , essinfρ ≤ c < c2 ≤ esssupρ
Loss Control in Behavioural Portfolio Selection – p. 21/27
Optimal contingent with constraint
The optimal splitting c∗ , x̃∗+ can be determined by
(sp’)
max v+ (c, x̃+ ) − v3 (c, c2 ; c, x̃+ )
s.t.
Theorem 8
x̃+ ≥ x̃0 , essinfρ ≤ c < c2 ≤ esssupρ
Suppose Assumption 1 hold.
(i) If (c∗ , c∗2 , x̃∗+ ) is optimal for Problem (sp’), then
ρ
′ −1
∗
)1ρ≤c∗ −q(c∗ , c∗2 ; x̃∗+ − x̃0 )1ρ∈[c∗ ,c∗2 ) −L1ρ≥c∗2 +B
X = (u+ ) (λ ′
T+ (F (ρ))
is an optimal contingent claim.
Loss Control in Behavioural Portfolio Selection – p. 21/27
Optimal contingent with constraint
The optimal splitting c∗ , x̃∗+ can be determined by
(sp’)
max v+ (c, x̃+ ) − v3 (c, c2 ; c, x̃+ )
s.t.
Theorem 8
x̃+ ≥ x̃0 , essinfρ ≤ c < c2 ≤ esssupρ
Suppose Assumption 1 hold.
(i) If (c∗ , c∗2 , x̃∗+ ) is optimal for Problem (sp’), then
ρ
′ −1
∗
)1ρ≤c∗ −q(c∗ , c∗2 ; x̃∗+ − x̃0 )1ρ∈[c∗ ,c∗2 ) −L1ρ≥c∗2 +B
X = (u+ ) (λ ′
T+ (F (ρ))
is an optimal contingent claim.
(ii) If there is no optimal (c, c2 , x̃+ ), then there is no optimal
contingent claim.
Loss Control in Behavioural Portfolio Selection – p. 21/27
Example: power value function
• Generally, X ∗ is a three-piece function of ρ
Loss Control in Behavioural Portfolio Selection – p. 22/27
Example: power value function
• Generally, X ∗ is a three-piece function of ρ
• Consider the example with u+ (x) = xα , u− (x) = kxα for
some k > 1 and α ∈ (0, 1)
◦ In this example, optimal solution always exists
Loss Control in Behavioural Portfolio Selection – p. 22/27
Example: power value function
• Generally, X ∗ is a three-piece function of ρ
• Consider the example with u+ (x) = xα , u− (x) = kxα for
some k > 1 and α ∈ (0, 1)
◦ In this example, optimal solution always exists
• Define f1 = 1 − Fρ , f2 (x) = E[ρ1ρ≥x ], f (x) = f2 (f −1 (x))
1
Loss Control in Behavioural Portfolio Selection – p. 22/27
Example: power value function
• Generally, X ∗ is a three-piece function of ρ
• Consider the example with u+ (x) = xα , u− (x) = kxα for
some k > 1 and α ∈ (0, 1)
◦ In this example, optimal solution always exists
• Define f1 = 1 − Fρ , f2 (x) = E[ρ1ρ≥x ], f (x) = f2 (f −1 (x))
1
Theorem 9
If h(x) = T− (f −1 (x))) is a convex function, then the
optimal splitting (c∗ , c∗2 , x∗+ ) satisfies c∗ = c∗2 . Hence the optimal
contingent claim is
∗
X =
(u′+ )−1 (λ
ρ
)1ρ≤c∗2 − L1ρ≥c∗2 + B.
′
T+ (F (ρ))
Loss Control in Behavioural Portfolio Selection – p. 22/27
Example: power value function
• Consider the case h(x) = xβ with β > 0
• If β < 1, Theorem 9 does not apply
Loss Control in Behavioural Portfolio Selection – p. 23/27
Example: power value function
• Consider the case h(x) = xβ with β > 0
• If β < 1, Theorem 9 does not apply
Theorem 10
Given h(x) = xβ for some β > 0. Then
• If β ≥ α, then c∗2 = c∗ , and
X ∗ = (u′+ )−1 (λ T ′ (Fρ (ρ)) )1ρ≤c∗2 − L1ρ≥c∗2 + B.
+
Loss Control in Behavioural Portfolio Selection – p. 23/27
Example: power value function
• Consider the case h(x) = xβ with β > 0
• If β < 1, Theorem 9 does not apply
Theorem 10
Given h(x) = xβ for some β > 0. Then
• If β ≥ α, then c∗2 = c∗ , and
X ∗ = (u′+ )−1 (λ T ′ (Fρ (ρ)) )1ρ≤c∗2 − L1ρ≥c∗2 + B.
+
• If β < α, then c∗2 = +∞, and
X∗
=
(u′+ )−1 (λ T ′ (Fρ (ρ)) )1ρ≤c∗
+
−
x̃∗+ −x̃0
∗
Eρ1ρ≥c∗ 1ρ≥c
+ B.
Loss Control in Behavioural Portfolio Selection – p. 23/27
Example: power value function
• Consider the case h(x) = xβ with β > 0
• If β < 1, Theorem 9 does not apply
Theorem 10
Given h(x) = xβ for some β > 0. Then
• If β ≥ α, then c∗2 = c∗ , and
X ∗ = (u′+ )−1 (λ T ′ (Fρ (ρ)) )1ρ≤c∗2 − L1ρ≥c∗2 + B.
+
• If β < α, then c∗2 = +∞, and
X∗
=
(u′+ )−1 (λ T ′ (Fρ (ρ)) )1ρ≤c∗
+
−
x̃∗+ −x̃0
∗
Eρ1ρ≥c∗ 1ρ≥c
+ B.
In any case, X ∗ is a two-piece function of ρ.
Loss Control in Behavioural Portfolio Selection – p. 23/27
Example: power value function
• Is the optimal solution always two-piece for power value
function?
Loss Control in Behavioural Portfolio Selection – p. 24/27
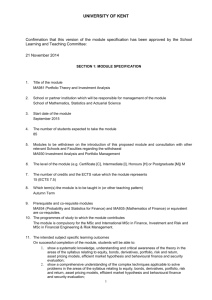
Example: power value function
• Is the optimal solution always two-piece for power value
function?
• An three-piece example:
◦ L = 10, x̃0 = −1, β = 0.85, α = 0.88, k = 2.25,
ρ ∼ Lognormal(−0.045, 0.09)
◦ h(x) =
0.5x
x ∈ [0, 0.05]
β (x − 0.05) + 0.025(0.1 − x) x ∈ [0.05, 0.1]
20
∗
0.1
xβ
x ∈ [0.1, 1]
◦ The optimal solution X̃ ∗ = X ∗ − B is as in the next figure
Loss Control in Behavioural Portfolio Selection – p. 24/27
Example: power value function
x
10
5
0.5
1.0
1.5
2.0
2.5
3.0
rho
-5
-10
Loss Control in Behavioural Portfolio Selection – p. 25/27
Summary
• Without loss control, the unconstrained optimal contingent
claim is a two-piece function of ρ
Loss Control in Behavioural Portfolio Selection – p. 26/27
Summary
• Without loss control, the unconstrained optimal contingent
claim is a two-piece function of ρ
• With loss control, the unconstrained optimal contingent
claim is a three-piece function of ρ
Loss Control in Behavioural Portfolio Selection – p. 26/27
Summary
• Without loss control, the unconstrained optimal contingent
claim is a two-piece function of ρ
• With loss control, the unconstrained optimal contingent
claim is a three-piece function of ρ
• For power value function, the three-piece optimal contingent
claim merge to two-piece function in many case
Loss Control in Behavioural Portfolio Selection – p. 26/27
Thank you very much!
Loss Control in Behavioural Portfolio Selection – p. 27/27