Course Review, part 2
advertisement

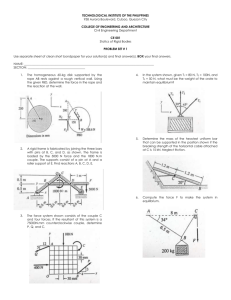
Course Review, part 2 ● ● ● Topics to be covered: ● Screws ● Frames ● Machines ● 3D Rigid Bodies ● Particle Equilibrium Others as time permits Course evaluation today (end of period 1, beginning of period 2) Screws ● ● In general, we treat screws in a similar way to a block sliding on an inclined plane. There are two angles of importance: ● ● The Lead angle which is found by the inverse tangent of L, the Lead, or amount the screw moves in one turn, divided by the circumference of the screw. This angle is usually designated α. The friction angle, which is found by the inverse tangent of the coefficient of friction. This angle is usually designated as ϕ. Screws (cont) ● ● ● Te resultant force, R, acts on the thread at a total angle of (α + ϕ) for upward motion of a jack, for example, and an angle of ( ϕ - α) for downward motion. We must consider the total force exerted by all of the threads, ΣR. The moment of R about the axis of the screw is Rrsin (α + ϕ) and the total moment due to all reactions of the screw threads is ΣRrsin (α + ϕ) Screws (cont) ● This is illustrated below: ● The moment then becomes : Pa= [rsin (α + ϕ)]ΣR Screws (cont) ● Equilibrium of forces in the axial direction requires: W = ΣR [cos (α + ϕ)] ● Dividing Pa by W gives: Pa = W tan (α + ϕ) ● To lower the jack requires a moment: Pa = W tan (ϕ – α) if ϕ > α ● If the reverse were true, the screw would unwind by itself and require a moment to keep it from unwinding of: Pa = W tan (α - ϕ) Screws (cont) 1. A square threaded screw jack is used to lower a 7000 pound load. A normal force of 80 pounds applied to the end of a 20 inch long jack handle is required for impending motion. The screw has 6 threads per inch and a mean diameter of 1.5 inches. Determine the coefficient of friction in the threads. Free body diagram of the unwrapped thread... ● You were asked to determine the friction coefficient given that M is 1600 lb-in to lower the jack, and the screw radius is 0.75 in. Screws (concluded) Frames—Example Problem 3. Determine the horizontal component of the reaction at Pin A of the pin connected frame shown below. (25 points) Another Frame Example ● A two foot diameter cylinder weighs 500 pounds and is cradled between a fixed surface and a rigid bar AB, which is pinned at A. A rope, CB, supports the rigid bar. All surfaces are frictionless. Determine the tension in rope CB. 6 feet B C 60o 60o A Example (cont) ● 500 lb FBD of cylinder: ● Rl sin 30 + Rr sin 30 = 500 ● Rl = Rr = 500 lb Rl Rr 1/tan 30 = 1.73 ● FBD of bar AB ● Σ Ma = 0 ● Tcb (5.20) = 1.73(500) ● Tcb = 166 lb Tcb 500 1.73' 6 cos 30=5.20 ft Machines ● Machines transmit and modify forces.. ● Identify the parts of the machine ● Make each a free body ● Identify two force members, consider these first ● Next, consider the multi-force members ● Solve the equations of equilibrium ● Reassemble the machine ● Check your results by means of an equation of equilibrium that you have not already used... Machines ● Machines transmit and modify forces.. ● Identify the parts of the machine ● Make each a free body ● Identify two force members, consider these first ● Next, consider the multi-force members ● Solve the equations of equilibrium ● Reassemble the machine ● Check your results by means of an equation of equilibrium that you have not already used... Three Dimensional Rigid Bodies ● ● There are now six equations of equilibrium: ● Σ Fx = 0 , Σ Fy = 0 , Σ Fz = 0 ● Σ Mx = 0 , Σ My = 0 , Σ Μz = 0 Remember that there are different reaction forces associated with different mounting methods ● A roller on a rail or rough surface has two forces ● A ball and socket has three forces 3D Rigid Bodies (cont) ● ● A fixed support has three forces and three couples Always remember to look for axes about which to compute moments that will simplify the problem ● ● Usually passing axes through mount points does this by removing many of the unknown forces from consideration. Remember, rigid bodies can have couples acting on them... the moment vector is movable and can be placed anywhere on the body... Particle Equilibrium ● ● Remember, when the resultant of all forces acting on a particle is ZERO, the particle is in equilibrium! Remember, always sketch a FREE BODY DIAGRAM ! Example: Additional Topics ● ● You will be responsible for knowing how to perform vector operations in three dimensions The calculation of centroids of composite areas will be expected ● The theorems of Pappas Guldinas should be part of your tool kit ● Friction in its many manifestations ● Supports in two and three dimensions ● Conditions for statically determinate supports Additional Topics (cont) ● Moments and force couples ● ● ● A moment vector is a free vector and can be placed anywhere on the body The sign convention...counterclockwise is positive, clockwise is negative The rules governing equivalent systems of forces ● Forces with the same line of action can be moved anywhere on the body, along that line of action Final Exam--reminder ● ● First part of the exam will cover the recent material ● Beams and cables ● Moments of Inertia ● Friction The second part of the exam will cover the entire course content