Synchronous Machines in Power Systems and Drives phase
advertisement

Synchronous Machines in Power Systems
and Drives
Most of the electrical power generators are threephase synchronous generators
Synchronous motors are competitive in higher
power ranges because of efficiency and lower costs
Reluctance and permanent motors are popular at
lower power ranges
Synchronous generator in power systems
transient stability study: maintain synchronism from
large oscillations caused by a transient disturbance
dynamic stability study: small signal behavior and
stability about some operating point
long-term dynamic energy balance study: dynamics of
slower acting components
Stability Studies
Sub-transient time constant of machine is between
0.03 to 0.04 second, shorter than
electromechanical oscillation
Electromechanical oscillation frequency between
synchronous generators in a power system lies
between 0.5 to 3 Hz (0.33 to 2 second)
Transient time constant of machine is between 0.5
to 10 second which is longer than the period of
electromechanical oscillation
Slower acting component with longer time
constants such as boilers and AGC response may
need more time between 10sec to 2 min
Different model shall fit into the different analysis
Basic Dynamics of Synchronous Generators
Basic dynamic behavior of synchronous generator
in transient situations:
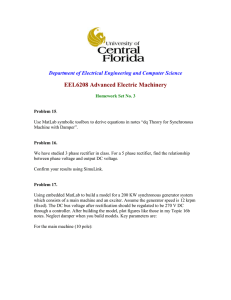
voltage behind the transient reactance of a generator
and network
E’=Eth+ j Xt I, Xt = X’d + Xth
jX’d
AC
Network
One-line diagram
jX’th
E’
E’th
Circuit Equivalent
take Thevenin’s voltage as reference phasor
Eth= Eth ∠0, and E’=E ∠δ
Basic Dynamics of Synchronous Generators
electrical output power of the generator
E ' Eth
Pgen= R(E’I*) =
pu
sin δ
Xt
from the above equation, we can see that power transfer
characteristic for the system is a sine wave with max value E’Eth/Xt
the rotor motion without damping
Pmech-Pgen= 2 H dω
pu
ωb dt
replace the dω/dt with d2δ/dt2, we obtain swing equation
Pmech − Pgen
2 H d 2δ
=
ωb dt 2
ω
dδ
pu or = b
2H
dt
2
∫ (P
mech
− Pgen )dδ
If machine was to maintain synchronism, excursion of δ would be
bounded and (dδ/dt) would have return to zero
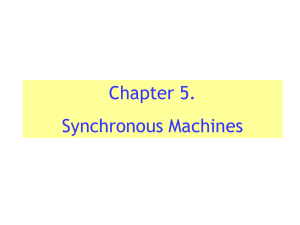
Transient Power Angle Characteristics
δ max
∫δ
min
Pmech1
transient power angle characteristics
( Pmech − Pgen )dδ = ∫
δ ss
δ min
A2
( Pmech − Pgen )dδ + ∫
δ max
δ ss
( Pmech − Pgen )dδ
A2max
A1
Pmech1
δmax
δSS
Pmech0
δ0
δ0 δSS δmax
π-δSS
Equal Criteria: A1 = A2
A1 < A2max
A1 = A2max
A1 > A2max
Stable
Critically Stable
Unstable
t0
t
Transient Power Curve And Dynamics
Without damping loss, rotor oscillates about δSS. Otherwise, δ eventually settles
to δSS.
The gain in rotor momentum could carry δ beyond critical angle π- δSS which
Pmech1>Pgen and rotor accelerates to lose synchronism
For purpose of determining the synchronism of the machine, area of A2max
should be larger than area of A1 (area of A2max is from δSS to π- δSS)
Transient power angle curve may be raised by increasing the excitation control
of E’
As a need to give a high speed control of E’ would introduce a negative
damping and adversely affect the dynamic stability, see [103]
The power system stabilizer (PSS) is introduced to obtain a better transient
performance over the control of excitation system
adverse impact of PSS: interaction of PSS and torsional mode of turbine shaft
gives rise to sub-synchronous oscillations
Transient stability study is mainly concerned in the synchronous generator, to
switch from motor notation to generator notation, it is required to invert the
sign of all stator currents in the voltage equation, flux linkage equation, and
torque equations.
Transient Model with d,q Field Windings
In this chapter, there are two more models to express the synchronous
machine dynamics: transient model and sub-transient model
The model difference between transient model in this chapter and that
in chapter 7 is that transient model in this chapter uses more machine
parameters directly obtained from standard tests, such as reactances
and time constants
For derivation of transient model equations, please see pp. 468-474
Transient model (without damper winding): state variable λd, λq
stator winding equations
dλq
rs − Ed'
− λq +
vq = − '
+ ωr λd
Lq ω
dt
rotor winding equations
'
dE
Ld − L'd
Ld '
q
'
Tdo
+ ' Eq = E f +
'
dt
Ld
Ld
Torque
ωr λd
r
vd = − s'
Ld
dλd
Eq'
ω − λd + dt − ωr λq
'
'
−
L
L
L
dE
q
q
q
'
'
d
ωr λq
+ ' Ed = − E g −
Tqo
'
dt
Lq
Lq
'
3 P λd Ed' λq Eq 1
1
+
− ' − ' λd λq
Tem =
'
'
2 2 ωr Lq ωr Ld Ld Lq
Transient Model with d,q Field Windings
Simplification of transient model
in the transient analysis, damper windings are no longer
active
in transient stability prediction, rotor winding transient
are dominant.
first swing of the rotor would be the interval of interest,
and the rotor transients vary at the rate of Tdo’ and Tqo’
the rotor transient would impact speed voltage term,
ωrλd, ωrλq, and greater than that of dλq/dt, dλd/dt.
Therefore, the effect of dλq/dt, dλd/dt could be
neglected
the transient model can be further simplified by
neglecting dλq/dt, dλd/dt
Transient Model Equations
Simplified transient model equations (ωr=ωe except for
rotor mechanical dynamics)
Stator winding equations (see pp.473 )
inputs : vq , Eq' , vd , Ed'
vd = − rsid + xq' iq + Ed'
outputs : iq , id
Rotor winding equations
vq = − rsiq − xd' id + Eq'
Tdo'
dEq'
+ Eq' = E f − ( xd − xd' )id
dt
'
' dEd
Tqo
+ Ed' = − E g + ( xq − xq' )iq
dt
Torque Equation:
Tem = −
inputs : E f , E g , id , iq
outputs : Ed' , Eq'
3 P
{
Eq' iq + Ed' id + ( xq' − xd' )id iq }
2 2ωe
N.m
Transient Model Equations
Rotor equations
dωrm
J
= Tem + Tmech − Tdamp (N.m)
dt
inputs : Tem + Tmech − Tdamp
d {(ωr − ωe ) / ωb }
= Tem ( pu ) + Tmech ( pu ) − Tdamp ( pu ) (pu)
2H
dt
output : ωr
dδ e
= ωr − ωe ,
dt
P
ωr = ωrm
2
Transient Model Block Diagram
Stator Block
Transient Model Block Diagram
Rotor Block
Transient Model Block Diagram
Field voltage
equation
d axis
q axis
Transient Model Block Diagram
Overall block diagram
from excitation
system
Synchronous machine model in Chap 7
Overall block diagram
Project 10-1 Fault tests of Synchronous Machine
(Homework): You are given a synchronous machine model with the
machine parameters given in Table 10.7 Set 1 to construct the
transient synchronous machine model. The machine is connected to
the following source:
v1=1√2sin(120πt+0) pu
v2=1√2sin(120πt-2π/3) pu
v3=1√2sin(120πt+2π/3) pu
1.
With excitation reference voltage Ef= 1pu, Tmech = 1 pu
(mechanical torque), apply three-phase bolted fault to
ground at t=10 sec, fault clear at t=10.25 sec, observe
and plot
a.
b.
c.
d.
e.
f.
vq, vd, iq, id, in one figure
ia, ib, ic in one figure
Pgen, Tem, δ, ω in one figure
Qgen, If’, in one figure
Show the critical fault clearing time and plot δ vs. time with
stable and unstable conditions
discuss what you see on the plots (ex. observe transient in field
current and qd, abc current)
Project 10-1 Fault tests of Synchronous Machine
2.
With excitation reference voltage Ef = 1pu, Tmech = 1 pu
(mechanical torque), apply single phase to ground fault on
phase c at t=10 sec, fault clear at t=10.25 sec, observe
and plot
1)
2)
3)
4)
5)
vq, vd, iq, id, in one figure
ia, ib, ic in one figure
Pgen, Tem, δ, ω in one figure
Qgen, If’, in one figure
discuss what you see on the plots (ex. observe transient in field
current and qd, abc current)
Suggestion:
the figure time scale can be shown starting from t=9 sec
through the time when system becomes stable after the
fault cleared
EXCITATION SYSTEMS
Scheme of Excitation systems contains
pilot exciter
main exciter to provide field winding voltage/current of synchronous machine
slip rings (optional)
automatic voltage regulator
Classification of excitation systems
dc excitation
primary excitation power is from dc generator whose field winding is on the same shaft
as rotor of synchronous generator
rotating
part
EXCITATION SYSTEMS
Classification of excitation systems
ac excitation (static)
field winding of alternator is on the same shaft as the rotor of the
synchronous machine
alternator’s stator and rectifier are stationary
EXCITATION SYSTEMS
Classification of excitation systems
ac excitation (rotary)
armature of alternator and rectifier are on the same shaft as the
rotor of the synchronous machine
alternator’s rotor field winding is stationary
EXCITATION SYSTEMS
Classification of excitation systems
ac excitation (from ac bus)
pilot exciter function is replaced by ac bus voltage
use controllable rectifier to adjust dc excitation
EXCITATION SYSTEMS
Overall scheme of excitation systems
detector, regulator, exciter, stabilizer, diode bridge, power
system stabilizer components
exciter
detector
diode bridge
regulator
COMPONENTS OF EXCITATION SYSTEMS
voltage transducer and load compensation circuit
voltage transducer and rectifier are modeled by a
single time constant with unity gain
compensation of excitation voltage due to internal
load is represented by RC+jXC
compensator
transducer
COMPONENTS OF EXCITATION SYSTEMS
voltage regulator
consists of an error amplifier with limiter
transient gain reduction can be achieved by adding a zero-pole
compensator
stabilizer
signal
stabilizer
feedback
signal
error amplifier with limiter
transient gain
reduction Tc<TB
zero-pole (lead-lag) compensator
COMPONENTS OF EXCITATION SYSTEMS
Exciter
output signal from regulator must be
amplified by the exciter before it is
used to excite the field winding of
the synchronous machine
the resistance and inductance of the
armature winding of exciter is
neglected due to the small number
of turns
voltage of the field winding and
armature winding in exciter are:
v f = i f rf +
dλ f (i f )
,
v x = f (i f , ix )
dt
v x is armature voltage of exciter
field current can be expressed in
terms of saturation function Se and
armature voltage vx
saturation part
if =
vx
+ Se v x ,
Rag
where Se = Aex exp Bev x
COMPONENTS OF EXCITATION SYSTEMS
Stabilizer
provide more phase margin in the open-loop frequency response of
regulator/exciter loop (add zero to increase stability)
transient gain reduction (to counter negative damping) can be achieved by
adding a zero-pole compensator with a proper value of TF or in TC and TB
PSS
regulator
exciter
stabilizer
COMPONENTS OF EXCITATION SYSTEMS
Exciter
substitute if in vf equation and we get vfpu equation
r
dv
v fpu = K E + f Sepu (v xpu )v xpu + τ E xpu
Rbase
dt
where
dλ f (v xpu )
rf
τE =
, KE =
, Rbase = Rag
dv xpu
Rbase
transfer function of the exciter, integrate (1)
rf
dv xpu
∫ v fpu dt = ∫ K E + Rbase Sepu (vxpu )vxpu dt + ∫ τ E dt dt
rf
1
v xpu = ∫ v fpu dt − ∫ K E +
S epu (v xpu )v xpu dt
Rbase
τE
(1)
COMPONENTS OF EXCITATION SYSTEMS
Exciter
transfer function of the exciter
v xpu
v xpu
rf
1
= ∫ v fpu dt − ∫ K E +
S epu (v xpu )v xpu dt
τE
Rbase
rf
1
(
)
=
−
+
v
K
S
v
E
fpu
epu xpu v xpu dt
∫
τE
Rbase
block diagram of the exciter
KE
COMPONENTS OF EXCITATION SYSTEMS
Diode bridge (optional)
mode 1: dc voltage output: Vd=Vdo-RCId
mode 2: dc voltage output:
Vd =
end of mode 3:
3Vdo
2
2X I
1 − C d
3VS
where Vdo =
2
I d = 2 I s 2 / 3 = Vs / ωe LC
range of three modes of a diode bridge rectifier
3 3
π
VS
COMPENSATION OF EXCITATION SYSTEMS
Instability problem of exciter
Solution to the instability of exciter
even the amplifier gain KA is small, AVR step response would be likely cause system
unstable
introduce a controller which add a zero to AVR open loop transfer function
How to add a zero to AVR open loop transfer function?
add a rate feedback to the control system by properly adjust KF and τF
regulator
model of rate feedback
PSS
exciter
stabilizer
Why to we need the Power System Stabilizer (PSS)
As a need to give a high speed control of E’ would introduce a negative damping and
adversely affect the dynamic stability, see [103]
The power system stabilizer (PSS) is introduced to obtain a better transient
performance over the control of excitation system
adverse impact of PSS: interaction of PSS and torsional mode of turbine shaft gives
rise to sub-synchronous oscillations
COMPENSATION OF EXCITATION SYSTEMS
Power system stabilizer (PSS)
filter to suppress the frequency component in the input signal that could
excite undesirable interactions
wash-out circuit for reset action to eliminate steady offset
two phase (lead-lag) compensator to make phase compensation (phase
margin), compensation center frequency at 1 / 2π T1T2 , 1 / 2π T3T4
limiter to prevent output of PSS from driving exciter into heavy saturation
prevent
saturation
compensate
frequency bandwidth
eliminate
dc offset
suppress
undesired frequency
PSS
stabilizer
SIMULATION OF EXCITATION SYSTEMS
Overall scheme of simplified excitation systems
regulator, exciter, stabilizer components
exciter
PSS
regulator
VF
stabilizer
Project 10-2 Excitation tests of Synchronous
Machine
1.
(Homework): You are given a synchronous machine model
with the machine parameters given in Table 10.7 Set 1 to
construct the transient synchronous machine model with
the excitation system. The machine is connected to the
following source:
v1=1√2sin(120πt+0) pu
v2=1√2sin(120πt-2π/3) pu
v3=1√2sin(120πt+2π/3) pu
With excitation reference voltage Vref= 1pu, Tmech = 1 pu
(mechanical torque), change Vref= 0.5pu at t=10 sec,
observe and plot
a.
b.
c.
d.
e.
vq, vd, iq, id, in one figure
ia, ib, ic in one figure
Pgen, Tem, δ, ω in one figure
Qgen, If’, in one figure
discuss what you see on the plots (ex. observe transient in field
current and qd, abc current)
Project 10-2 Fault tests of Synchronous Machine
2. With excitation reference voltage Vref= 1pu, Tmech = 1 pu
(mechanical torque), change Vref= 1.5pu at t=10 sec,
observe and plot
a.
b.
c.
d.
e.
vq, vd, iq, id, in one figure
ia, ib, ic in one figure
Pgen, Tem, δ, ω in one figure
Qgen, If’, in one figure
discuss what you see on the plots (ex. observe transient in
field current and qd, abc current)
Suggestion:
the figure time scale can be shown starting from t=9 sec
through the time when system becomes stable after the
fault cleared
Case 1: Transient Models (single machine)
Case: one machine is connected to a simple external
network: Vz = (re+ j xe) IZ
I
VZ
re
+
jxe
Such a phasor quantity could be expressed in qd
components of synchronous reference frame: Vz = vqze – j
vdze and Iz = iqe – j ide
To incorporate with generator side parameter in rotor frame,
bus voltage of synchronous reference frame should be
transformed from synchronous frame into rotor frame by
multiplying e-jδ
The rotor frame voltage can be expressed as:
vqr – jvdr = e-jδ (vqze – j vdze)= (re+ j xe) e-jδ (iqe – j ide )
= (re+ j xe) (iqr – j idr)
Case 1: Transient Models (single machine)
The external line drop of re+ j xe can be directly
added to the stator winding voltage equations.
vq = −( rs + re )iq − ( xd' + xe )id + Eq'
vd = −( rs + re )id + ( xq' + xe )iq + Ed'
The infinite bus voltages in phasor quantity should
be expressed in qd quantities and the synchronous
frame needs to be transformed into rotor frame
~ e
~
e
v − jv = 2Va , iq − jid = 2 I a
~
for Va = Va ∠0o , vqe = 2 Va , vde = 0
e
q
e
d
vqr – jvdr = e-jδ (vqe – j vde)
steady state to qd
from synchronous
frame to rotor frame
Case 1: Transient Models (single machine)
Stator module with external network
stator resistor: rs+re
stator reactance: x’d+xe, x’q+xe
1
1
=
DZ (rs + re )2 + (xd' + xe )(xq' + xe )
Case 1: Transient Models (single machine)
qd synchronous to rotor frame module
transform bus voltage of synchronous reference to rotor
reference value
Case 1: Transient Models (single machine)
Overall synchronous generator transient model
rotor winding
rotor winding
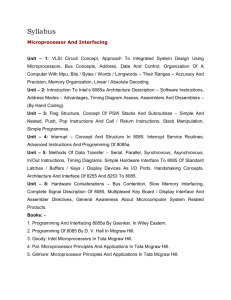
Case 2: Multi-machines System
Main interests in the study of multi-machine
examine the interactions between generators
transients of the electro-mechanical oscillations
check whether the generators will maintain in synchronism
Case study, two machines interconnected with external
buses
Four bus test system
4
r14
3
r34
jx14 1
gen1
jx34
∞ bus
I1
I4
load4
r24
jx24 2
gen2
I2
Case 2: Multi-machines System
Model setup:
network is expressed by [ ie ]=[ Y ][ Ve ] in synchronous reference frame
machine model is in rotor reference frame
needs a module between stator and network to convert quantities (v, i) of
synchronous frame to rotor frame
network matrix should have voltages (Eqd, Vqd) or injected currents (iqd) as
inputs and associated currents iqd as outputs to feed the inputs of
generator model or voltages (vqd) as output of injected bus (load bus)
i qe1
Eqpe1
Eqpe2
i de1
1.
T2
vqe3
T3
i qe4
i qe2
Edpe1
Edpe2
i de2
0
T4
vde3
T5
i de4
network
Case 2: Multi-machines System
Incorporate stator voltage equation into network equation
stator voltage equation is in rotor frame
network equation is in synchronous frame and expressed in phasor form
to incorporate these two sets of equations together, transform stator
equation in synchronous frame whose q-axis is aligned with reference
phasor
stator voltage in synchronous frame and phasor form:
( vqe − jvde ) = −( rs + jxd' )(iqe − jide ) + e jδ ( Eq' − jEd' )
~
~
~
V
= − ( rs + jxd' ) I
+
E'
the fixed stator impedance of (rs+jxd’) can now easily added into Zbus or
Ybus of the network matrix
~
E ' can be obtained from simulation of rotor field winding equation if
Thevenin equivalent circuit is used
Case 2: Multi-machines System
Incorporate stator voltage equation into network
equation
combine stator admittance with network admittance
4
3
g34
load4
jb14 1
jb34
ggen1
jbgen1
g24
jb24 2
Eq1’-jEd1’
gen1
I1
I4
g14
ggen2 jbgen2
I2
Y11=(g14+ggen1)+j(b14+bgen1) Y14=Y41=-(g14+jb14)
Y22=(g24+ggen2)+j(b24+bgen2) Y24=Y42=-(g24+jb24)
Eq2’-jEd2’
gen2
Case 2: Multi-machines System
Bus admittance matrix of the network including transient admittance of
two generators
iqe1 − jide1 Y
11
e
e
iq 2 − jid 2 Y21
=
e
e
iq 3 − jid 3 Y31
i e − ji e Y41
d4
q4
Y12 Y13
Y22 Y23
Y32 Y33
Y42 Y43
'e
'e
E
jE
−
q
d
1
1
Y14
'e
'e
Y24 Eq 2 − jEd 2
Y34 vqe3 − jvde 3
Y44 v e − jv e
d4
q4
choose bus 4 voltage as output and bus 4 injecting current as input for
load or fault current
iqe1 − jide1
e
e
iq 2 − jid 2
=
e
e
iq 3 − jid 3
v e − jv e
d4
q4
Eq'e1 − jEd'e1
'e
'e
Eq 2 − jEd 2
gyrated vqe3 − jvde 3
i e − ji e
d4
q4
Y
Case 2: Multi-machines System
Model setup:
network is expressed in [ ie ]=[ Y ][ Ve ], Y is complex
matrix with Gij+jBij (conductance and susceptance), ie is
matrix with iqe+jide, Ve is matrix with Vqe+jVde
need to separate xq+jyd components into q, d
components
method to separate complex quantities
(iq - jid)=(G + jB)(vq - jvd) into q, d quantities:
B vq
iq G
=
v
−
B
G
i
d
d
matrix gyration to reform input and output components
base VA ratio of network and generator
inet S sys
=
igen S gen
Case 2: Multi-machines System
Overall model diagram
ide1
U(E)
Scope
U
y1
Selector1
Sbratio(1)
Sys/Gen1VA_
T o Workspace
Mux
Mux
vref(1)
Initialize
and plot
Vref1
m2
Clock
T
Eqpe1
Edpe1
T mech1
tmodel
Sys/Gen1VA
iqe1
-K-
Sys/Gen2VA
iqe2
-K-
U(E)
Scope1
U
y2
Selector
Eqpe2
T o Workspace1
Mux
Mux_
1.
vref(2)
T3
iqe4
Vref2
Edpe2
0
T1
T4
vde3
T mech(2)
T mech2
T2
vqe3
Clock1
tmodel1
T5
ide4
ide2
network
Sbratio(2)
Sys/Gen2VA_
Case 2: Multi-machines System
Model setup:
Network module
Case 2: Multi-machines System
Inside generator model :
generator model
Ef
1
Exc_sw(1)
Exc_sw
in_Vref
|Vt|
vqt
Sw
1
vdt
1
s
1/Tpdo(1)
sum
exciter
1/Tpdo
xd(1)-xpd(1)
out_|Vt|
Eqp_
3
2
out_|I|
Eqp
out_Pgen
id_
4
out_Qgen
VIPQ
stator_wdg
Gain2
delta
2
5
out_delta
in_iqe
iq
6
3
id
out_puslip
in_ide
7
qde2qdr
4
iq_
out_Tem
in_Tmech
xq(1)-xpd(1)
Rotor
Gain
8
1/Tpqo(1)
Sum
Gain1
1
s
out_Eqpe
9
Edp
qdr2qde
out_Edpe
Case 2: Multi-machines System
Inside generator model:
stator module inputs: Eq’, Ed’, iq, id not Eq’, Ed’, vq, vd
stator module outputs: vq, vd
Case 2: Multi-machines System
Inside generator model :
excitation system: Ef => (vref-vfb), (1/s) and
feedback loop.
Case 2: Multi-machines System
Inside generator model :
exciter
Case 2: Multi-machines System
Inside generator model :
rotor block
ωr
Case 2: Multi-machines System
Inside generator model :
generator model
Ef
1
Exc_sw(1)
Exc_sw
in_Vref
|Vt|
vqt
Sw
1
vdt
1
s
1/Tpdo(1)
sum
exciter
1/Tpdo
xd(1)-xpd(1)
out_|Vt|
Eqp_
3
2
out_|I|
Eqp
out_Pgen
id_
4
out_Qgen
VIPQ
stator_wdg
Gain2
delta
2
5
out_delta
in_iqe
iq
6
3
id
out_puslip
in_ide
7
qde2qdr
4
iq_
out_Tem
in_Tmech
xq(1)-xpd(1)
Rotor
Gain
8
1/Tpqo(1)
Sum
Gain1
1
s
out_Eqpe
9
Edp
qdr2qde
out_Edpe
Case 2: Multi-machines System
Overall model diagram
ide1
U(E)
Scope
U
y1
Selector1
Sbratio(1)
Sys/Gen1VA_
T o Workspace
Mux
Mux
vref(1)
Initialize
and plot
Vref1
m2
Clock
T
Eqpe1
Edpe1
T mech1
tmodel
Sys/Gen1VA
iqe1
-K-
Sys/Gen2VA
iqe2
-K-
U(E)
Scope1
U
y2
Selector
Eqpe2
T o Workspace1
Mux
Mux_
1.
vref(2)
T3
iqe4
Vref2
Edpe2
0
T1
T4
vde3
T mech(2)
T mech2
T2
vqe3
Clock1
tmodel1
T5
ide4
ide2
network
Sbratio(2)
Sys/Gen2VA_
Project 10-3 Multi-synchronous machines Project
Read carefully on project 2 in 10.9.2: multi-machines system
Use the simulation model (machine parameters are in Set 1 of TABLE 10.7) to
run the simulation as follow:
run the simulation to create plots as figure 10.24 (a), (b), and (c). In this case,
step changes in torque is applied at generator 2. As you can see in the figure,
machine originally operate in Tmech = 0.8pu, a step change in torque to 0.9pu at
t=7 sec, then a step change to 0.7pu at t=15 sec, finally a step change to 0.8 pu
at t=22 sec. Use the line impedances (in pu) as follow: z14 = 0.004+j0.1, z24 =
0.004+j0.1, z34 = 0.008+j0.3, y40=1.2-j0.6, report and comment on the figures.
run the similar simulation as above but increase the line impedance of z14 =
0.016+j0.4, z24 = 0.016+j0.4 (decrease the electrical strength), plot results
similar to figure 10.24(a,b,c) and observe the interaction of generator 1 and 2
due to the change of electrical strength z14 and z24, report on the difference due
to the change of electrical strength
Tmech2 = 0.8pu and Tmech1 = 0pu, a fault current of iq4e-jid4e = -(2-j2) pu is to be
introduced at t=5 sec.
the fault duration is 0.15 seconds. Use the line impedances (in pu) as follow: z14
= 0.004+j0.1, z24 = 0.004+j0.1, z34 = 0.008+j0.3, plot results similar to figure
10.25(a,b,c) , plot all the bus voltages vs. time, and report the interaction of
generator 1 and 2 due to the fault
Observe how long the duration of the fault is so that the generator 2 will be out
of synchronism?