[00:00:17] Today we're gonna talk about trigonometry in engineering
advertisement

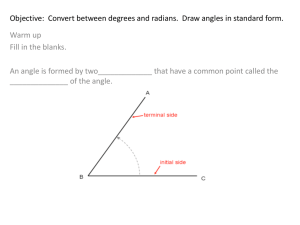
[00:00:17] Today we’re gonna talk about trigonometry in engineering. And the example we like to use for that is what we call the one-link robot. So I want you to picture, [00:00:27] what if we had a robotic manipulator. And I’m just gonna draw it mounted here, say, in a two-dimensional kind of plane. And so, what the robot will really consist of is, essentially, it will be a rotating link that is controlled by a motor. And this is actually pretty [00:00:47] typical in engineering robotic systems. When you start with a onedimensional robotic manipulator, [00:00:54] then what you’re talking about is a single link controlled by a motor at the center. And so, let’s just go ahead and locate the center of the motor there. And so, this guy over here is gonna be my motor. And then I’ll have a link that has a length, l. And so, that can be oriented at any point in the plane here, but I’ll go ahead and draw it in this orientation. And so, there is my link with a length, l. And so if I think about the location of that link in an x-y plane, then I would think about the vertical as y and the horizontal as x. And so, at any point if I would like to locate the tip of the robotic manipulator, then that would be some point, P, which I will call coordinates x and y. So, [00:01:48] the most basic way you can think about the job of an engineer with a [00:01:52] one-link robot like this, is can I locate the coordinates of the end point of the robot, based on what it is that I [00:02:00] control. So as the engineer, I’m controlling the motor and [00:02:04] what that motor does, is it cause the link to rotate in the plane. So what I’d like to do is label that rotation as shown, I’m gonna call that an angle theta. So the angle theta is defined as shown in the picture. It’s measured counterclockwise from the x-axis. And so given the angle theta [00:02:24] and the length of the link, l, can I locate the coordinates of the end of that robot? So, if you think about the picture, [00:02:35] what you can see is that in the coordinate system here, that [00:02:39] link essentially makes a triangle where [00:02:42] the adjacent side of the triangle is the coordinate value, x, and the opposite side of that triangle is the coordinate value, y. And similarly, what I can do is I can measure theta all the way around in any quadrant by thinking about rotations in either of two directions. I can do a positive theta which is a counterclockwise rotation measured from the x-axis, or I can rotate the other way and I can call that a negative angle of theta and that would be a clockwise rotation. And so, those are [00:03:22] the standard definitions of angle in terms of orientation that we use in terms of an x-y coordinate system as show in the figure. So, thinking about the angles to sweep out that entire plane. If you look at this then essentially [00:03:39] you have a positive angle of theta, which would be measured anywhere from 0, that would be starting on the x-axis, and so it would be anywhere between 0 less than or equal to theta, less than or equal to 180 degrees. And so, 180 degrees would bring you all the way back to the other side on the negative x-axis. Similarly, I can locate that angle in terms of another measure. And so, instead of degrees, it is common in many cases to use the measure radians. And so, you may recall that the total number of radians in 180 degrees is the number pi. And so, there’s pi radians between 0 and 180 degrees. [00:04:28] That’s the definition of positive theta. I can also think about [00:04:32] negative theta defined in a similar way. And so, the angle negative theta would be essentially everywhere between 0, as the greatest value algebraically. That’s greater than equal to theta which is then greater than equal to negative 180 degrees. And again, if I want to work in radians, then I would say, 0 greater than or equal to theta, which is greater than or equal to negative pi radians. And so at this point, it’s useful to think about: why is it that we consider multiple measures [00:05:10] of angle? And I want you to think really, as this [00:05:15] maybe as an aside. But the question of really what is a radian? comes to play. And maybe I’d like to motivate that by [00:05:24] thinking about what is the history of angle measurement to begin with? And why do we need more than one measure of an angle? And so, for example, [00:05:33] if I’m thinking about angles measured in the plane and we’ve decided that this angle here is 180 degrees. You might ask the question, why is it not, for example, an angle that is measured here, and say, why isn’t this, say 200 degrees? Why not? And so, there’s some sense that this measurement of degrees where each quadrant of the circle here, or each quadrant of the plane, is a right angle that we call 90 degrees. And if you look [00:06:13] back at the reason for that, that’s really a historical reason that goes all the way back to astrology and to the Greeks and the reality is, measurement in degrees is arbitrary. And so, what we need in engineering is a measurement of angles that’s not arbitrary. And again, if I was making this up from scratch I might say that this is [00:06:33] 100 degrees, 200 degrees, 300 degrees, and maybe 400 degrees over here. As opposed [00:06:41] to what we’ve gone with conventionally, [00:06:44] 90 degrees, 180 degrees, 270 degrees, 360 degrees. And so again, why this measure of radians then instead of degrees? It’s because degrees is a counter [00:06:56] that essentially is made up. And so, the question I guess is: why is it that a radian is not made up? And if you think about what a radian really is, [00:07:06] it is recognizing that as I rotate, say the link, through a certain angle that all points on the tip of the robot fall actually on a circle. And so, as I rotate this thing around, I will have a circle that has a radius l. And so, if you recall, sweeping out any particular arc length on a circle gives me a relationship between the angle theta that results in that arc length. And if you recall back, that s, the arc length, is equal to l times the angle, theta. Or if this is any radius, r, you may recall s equals r [00:07:57] theta as the relationship. And so, this idea that the measure of angle in radians is not arbitrary. [000:08:05] This is if theta is defined by definition as s divided by l and if you think about the physical units [00:08:14] of that, s is a length, it’s an arc length and because that’s a length it will be measured in units of inches or meters. And similarly, the length of the [00:08:26] link l is a length. And so, when I divide length by length, I get no dimension at all. And so, a dimensionless measure of angle that’s based on a ratio of two distances is in fact the only definition of angle that has physical meaning. So, why [00:08:45] again do we have pi radians in 180 degrees? Well, [00:08:49] recall that the definition of the circumference of a circle is 2 pi times the radius, in this case, l. That’s equal to the circumference. And so, the question is: what angle is the circumference? [00:09:11] And so, the way to think about that, if 2 pi r gives me all the way around the circle, then what is the corresponding theta? [00:09:21] Well, theta is the s, that’s 2 pi r, excuse me, 2 pi times l, divided by the radius itself, which is l. And so, what happens is, the l cancels out and the answer is 2 pi radians. And so, [00:09:45] by definition of the physical measurement, how much it takes to go all the way around in terms of the radius. That answer says that the total angle around the circle is 2 pi radians. [00:09:59] So, if we then arbitrarily say that theta equals 360 degrees is all the way around the circle. Then, 360 degrees equal 2 pi radians. Then, the answer would be then that 180 degrees is equal to pi radians, which is the same statement that we had previously. So the [00:10:23] fact that an angle theta equals pi equals 180 is halfway around. That is a physical result that stems from the fact that is takes exactly t2 pi times the radius, or in this case the length of the link, in order to make is all the way around the circle. So, that is a an artifact of physical geometry. It is not made up and it’s the reason why every measure of angle in engineering that actually is based on a physical derivation, has no units and we label those units as radians.