Parametric cubic spline airfoil
advertisement

Practical parametric geometry for aircraft design
26 May, 2015
J. Philip Barnes
“Regenosoar” regen-electric aircraft rendered with
Blender 3D open-source graphics software and 100%
math modeled with parametric equations via
Blender’s integrated Python programming language
J. Philip Barnes www.HowFliesTheAlbatross.com
Abstract
Practical parametric geometry for aircraft design
J. Philip Barnes, Technical Fellow, Pelican Aero Group
Theory and application of practical methods for aircraft geometry
parameterization and visualization are described. The methods, characterizing
the surface geometry of complete aircraft, wings, fuselages, ducts, and new or
existing airfoils, include fidelities ranging from “rapid visualization” to “high
fidelity.” We apply two integrated programming and visualization platforms. The
first is EXCEL and Visual Basic and the second is Blender 3D (open-source)
with its resident Python programming language. In all cases, we characterize
Cartesian coordinates (x,y,z) with parametric coordinates (u,v).
For “rapid synthesis,” we introduce modified trigonometric functions capable of
quickly approximating an airfoil, wing, or fuselage with just a handful of
parameters. We also introduce a “cubic quadrant” method for for fuselage cross
section design. For “good fidelity” modeling of new or existing airfoils, we
introduce a “parametric Fourier series” method satisfying specified leading edge
radius, max&min vertical coordinates, upper&lower afterbody slopes, and aftedge thickness. A “fine tuning” parameter allows further subtle adjustments.
Upper and lower surfaces can also be modeled separately for greater control.
For “high fidelity,” we describe the theory and application of the cubic spline
which is unique in its class by passing through, not just near, all specified points
while preserving C2 continuity. Although the cubic spline not C3 continuous, we
show that airfoil surface velocity distributions remain smooth with cubic-spline
parameterization of the airfoil geometry. We also apply the cubic spline to
characterize wings and fuselages. Core algorithms and code blocks are listed or
otherwise made available to ensure ready access to the methods.
J. Philip Barnes www.HowFliesTheAlbatross.com
Presentation Contents ~ Practical parametric geometry
Air vehicle
Applications
Objectives
&Rationale
Cubic spline
Theory & App.
EXCEL/VB
Blender/Python
“Rapid vis”
Trigonometric
Airfoil Geom.
Fourier-series
J. Philip Barnes www.HowFliesTheAlbatross.com
Blender 3D rendering of python-programmed geometry
Python window
Rendering window
J. Philip Barnes www.HowFliesTheAlbatross.com
Getting started: EXCEL as a scientific spreadsheet
• Purpose (typical):
•
•
•
•
Read input and/or data from spreadsheet
Edit & run algorithm; generate new data
Write to spreadsheet cells & plot results
Copy all data & plots as new sheet; re-run
• One-time setup:
1)
2)
3)
4)
EXCEL Options ~ Formulas ~ R1C1 ...
Trust Ctr. ~ settings ~ macro ~ enable & trust
Toolbar ~ more... ~ all ... ~ Visual Basic ~ Add
Set VB editor window to float on spreadsheet
• Typical operations:
1)
2)
3)
4)
5)
6)
Type in the column headers, i.e. t, x, y, z
VB ~ insert ~ module ~ Type: sub example
Enter or edit code ~ save file as *.xlsm
Click run icon (note: module stays with the file)
Highlight applicable columns & plot the results
New case: Copy sheet, revise inputs, repeat 4)
Powerful Parametrics
for Airfoil Geometry
J. Philip Barnes
U
June, 2015
W
Cubic Spline
W
J. Philip Barnes www.HowFliesTheAlbatross.com
Airfoil parametric geometry
• Objectives and Applications
– Closely match/smooth existing airfoils
– Geometric design of new airfoils
– Option: modest-fidelity rapid vizualization
• Three methods herein
– Trigonometric (“Rapid viz”)
– Fourier Series (good fidelity)
– Parametric cubic spline (high fidelity)
• Common approach
–
–
–
–
–
–
One or two parametric surfaces
Set LE radius, 1-to-3 midpoints, aft slope
X(W) parametric, 0 ≤ W ≤ 1, front to back
Z(U) Fourier, or Z(W) polynomial or spline
“Fine tuning” via one or more aux. params.
EXCEL files included herein, each method
J. Philip Barnes www.HowFliesTheAlbatross.com
“Rapid viz” airfoil shaping: Hybrid Cartesian & trig. functions
X = 1 - sin(pu) ; Z = c sin(2pu)
DZ = c sin2(2pu)
1. simple wave, Z(u)
X = 1 - (1-g) sin(pu) + g sin(3pu)
2. reshape X(u)
DZ = c sin (X3p)
4. add camber
DZ = c sin (X3p)
5. lower negative cusp
DZ = c sin (X3p)
3. add aftbody cusp
6. opposite-sign cusps
J. Philip Barnes www.HowFliesTheAlbatross.com
“Higher” fidelity ~ Parametric Fourier-series airfoil
U
•
•
•
•
•
•
•
•
•
•
•
•
•
•
Fourier Series terms z(u)
Best used for one curve Z(U), not two Z(W)
Add 8 sinusoidal terms plus aft-edge width
Single L.E. rad.(R), max/min (X,Z) , two aft (b)
Use upper & lower fine-tune parameters (g)
Continuous in all derivatives
Solve eight eqns. for Fourier amplitudes
Satisfy end slopes (dW/dZ) & max/min
Compact “airfoil-sharing” formula
Airfoil construction sequence:
U = 0 to 1 ; W = if(U < 0.5, 1 - 2U, 2U - 1)
g = gb + (gt - gb) cos2 (pU/2)
X = 1 - (1-g) cos(pW/2) – g cos(3pW/2)
Z = S m=1 to 8 {am sin(mpU)} + Za(1-2U)
W
Fourier Series
W
1
Parameterization
for X(W)
X
0
g
“fine-tune”
parameter
0
Z
0
J. Philip Barnes www.HowFliesTheAlbatross.com
W
1
First 4 terms
of the series
U
Parametric Fourier-Series airfoil ~ NLF(1)-0416 ~ match
Fwd fine tuning, g inputs:
Upper gu
0.070
Lower gL
0.130
0.20
Z(X)
0.15
0.10
0.05
L.E. rad., R = r/c
0.0180
NLF(1)-0416
0.00
-0.05
-0.10
Upp. max. position, Xu
0.3000
Low. min. position, XL
0.3500
Upp. max. elevation, Zu
0.1045
Low. min. elevation, ZL
-0.0555
-0.15
0.0
0.1
0.2
0.3
0.4
0.5
0.6
1.0
0.8
X(u)
0.6
0.4
Upp. aft slope, bu, deg
13.00
Low. aft slope, bL, deg
-10.00
0.2
0.0
0.0
Half trailing-edge, Za
0.0030
0.2
0.3
0.4
0.5
0.6
0.15
0.17245
0.09366
0.30000
0.37500
0.12403
0.08208
0.25000
0.40000
0.08190
0.06715
0.20000
0.42500
0.04734
0.05008
0.15000
0.45000
0.02153
0.03232
0.10000
0.47500
0.00548
0.01527
0.05000
0.50000
0.00000
0.00000
0.00000
0.52500
0.00560
-0.01290
0.05000
0.55000
0.02243
-0.02337
0.10000
0.57500
0.05031
-0.03177
0.15000
0.60000
0.08864
-0.03863
0.20000
0.62500
0.13645
-0.04443
0.25000
0.65000
0.19246
-0.04935
0.30000
0.67500
0.25506
-0.05316
0.35000
0.70000
0.32250
-0.05529
0.40000
0.72500
0.39288
-0.05499
0.45000
0.75000
0.46431
-0.05163
0.50000
0.77500
0.53503
-0.04499
0.55000
0.80000
0.60345
-0.03545
0.60000
0.82500
0.66831
-0.02405
0.65000
0.85000
0.72871
-0.01231
0.70000
0.87500
0.78419
-0.00201
0.75000
0.90000
0.83469
0.00529
0.80000
0.92500
0.88060
0.00857
0.85000
0.95000
0.92269
0.00767
0.90000
0.7
0.97500
0.8
0.96206
0.9
0.00331
1.0
0.95000
1.00000
1.00000
-0.00300
1.00000
0.7
Z(u)
0.10
RUN
0.1
0.35000
0.8
0.9
1.0
specifications
Fourier Series
0.16
Z(X)
Fourier Series
0.14
Target Airfoil
specifications
0.12
0.10
0.08
0.06
0.04
0.02
0.00
-0.02
-0.04
0.05
0.00
-0.06
Trailing edge notes
No airfoil can have zero
trailing-edge thickness;
nor should it. Assume
0.001 aft-edge thickness,
unless input otherwise
Fourier Coefficients
2.2794E-02
6.9443E-02
1.8405E-02
-1.6762E-02
1.3916E-03
-4.7482E-03
5.7805E-03
-8.0577E-05
-0.05
-0.08
-0.10
0.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
Upper & Lower 1st Derivatives, dZ/dW Vs. W
0.6
0.0
1.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1.0
0.9
1
Upper and Lower 2nd Derivatives, d2Z/dW2
5.0
4.0
0.4
3.0
0.2
2.0
1.0
0
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0.0
0
-0.2
0.1
0.2
0.3
0.4
-1.0
-2.0
-0.4
-3.0
-0.6
-4.0
J. Philip Barnes www.HowFliesTheAlbatross.com
0.5
0.6
0.7
0.8
Parametric Fourier-Series airfoil ~ PCS-001 ~ new design
Fwd fine tuning, g inputs:
Upper gu
0.200
Lower gL
0.100
0.20
Z(X)
0.15
0.10
PCS-001
0.05
L.E. rad., R = r/c
0.0115
0.00
-0.05
-0.10
Upp. max. position, Xu
0.4140
Low. min. position, XL
0.3500
Upp. max. elevation, Zu
0.1465
Low. min. elevation, ZL
-0.0210
-0.15
0.0
0.1
0.2
0.3
0.4
0.5
0.6
1.0
0.8
X(u)
0.6
0.4
Upp. aft slope, bu, deg
7.00
Low. aft slope, bL, deg
4.30
0.2
0.0
0.0
Half trailing-edge, Za
0.0005
0.1
0.2
0.3
0.4
0.5
0.6
0.25
0.20
0.35000
0.23585
0.12542
0.30000
0.37500
0.16765
0.10526
0.25000
0.40000
0.10905
0.08159
0.20000
0.42500
0.06190
0.05708
0.15000
0.45000
0.02757
0.03422
0.10000
0.47500
0.00686
0.01486
0.05000
0.50000
0.00000
0.00000
0.00000
0.52500
0.00667
-0.01022
0.05000
0.55000
0.02606
-0.01639
0.10000
0.57500
0.05695
-0.01953
0.15000
0.60000
0.09782
-0.02075
0.20000
0.62500
0.14694
-0.02101
0.25000
0.65000
0.20250
-0.02098
0.30000
0.67500
0.26270
-0.02096
0.35000
0.70000
0.32583
-0.02099
0.40000
0.72500
0.39037
-0.02097
0.45000
0.75000
0.45502
-0.02076
0.50000
0.77500
0.51875
-0.02025
0.55000
0.80000
0.58079
-0.01941
0.60000
0.82500
0.64064
-0.01826
0.65000
0.85000
0.69803
-0.01680
0.70000
0.87500
0.75295
-0.01501
0.75000
0.90000
0.80552
-0.01286
0.80000
0.92500
0.85606
-0.01030
0.85000
0.95000
0.90498
-0.00732
0.90000
0.7
0.97500
0.8
0.95278
0.9
-0.00401
1.0
0.95000
1.00000
1.00000
-0.00050
1.00000
0.7
Z(u)
0.8
0.9
1.0
specifications
Fourier Series
0.15
0.18
Z(X)
Fourier Series
0.16
Target Airfoil
specifications
0.14
0.12
0.10
0.08
0.06
0.04
0.02
0.00
0.10
0.05
RUN
-0.02
0.00
-0.05
-0.04
-0.10
0.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1.0
0.9
1
Upper and Lower 2nd Derivatives, d2Z/dW2
Upper & Lower 1st Derivatives, dZ/dW Vs. W
0.6
0.0
1.0
5.0
4.0
0.4
3.0
0.2
2.0
1.0
0
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0.0
0
-0.2
0.1
0.2
0.3
-1.0
-2.0
-0.4
-3.0
-0.6
-4.0
J. Philip Barnes www.HowFliesTheAlbatross.com
0.4
0.5
0.6
0.7
0.8
Cubic spline ~ Parametric u(t) or Cartesian y(x)
•
•
•
•
•
•
•
Get smooth curve passing through (1_to_n) points
VB array dim. (n) elements: 0_to_n ~ ignore 0th elem.
1st & 2nd derivative Continuity (3rd is not continuous)
Independently control L/R-end slope or 2nd derivative
Internal-node continuity yields tri-diagonal system
End constraints are applied in first and last rows
Parametric x(t) ; v “velocity”; a “acceleration”
x
i-1
i
i+1
cubic
t
x
n
vdx/dt
parabolic
2
3
t
1
a ≡ d2x/dt2
t
linear
t
1 0
p q
2 2
0 p3
:
0 ...
: ...
0 0
0 0
0 0
0 ... 0 0 0 0 a1 0
r2 0 0...
0 a2 s2
q3 r3 0 0...
0 : s3
ai-1 :
0 pi qi ri 0...
0 ai si
ai1 :
... 0 pn-2 qn 2 rn 2 0 : sn 2
...0 0 pn-1 qn 1 rn 1 an-1 sn 1
0 0...0 0 0 1 an 0
• Set ends; Solve linear EQs. for internal-knot accelerations (a)
Parametric cubic spline ~ Various end constraints
“Stiff” ends
“Flexible” ends
“Flat” ends
Parametric cubic spline airfoil
U
•
•
•
•
•
•
•
•
•
•
•
•
•
•
•
Cubic spline(s) pass through all set points
Wider design space including “unusual”
Match 0th, 1st, 2nd derivatives, ea. node
Discontinuous 3rd derivative
Input LE rad.(R), 3 pts. (X,Z) , aft slope (b)
g can be varied but is normally fixed (0.1)
Solves 5 eqns. spline-knot 2nd derivatives
Gauss-Seidel in lieu of Gaussian Diag.
3 midpoints versus single midpoint
Any position, not necessarily max/min
Less compact “airfoil-sharing package”
U = 0 to 1 ; W = if(U < 0.5, 1 - 2U, 2U - 1)
X = 1 - (1-g) cos(pW/2) – g cos(3pW/2)
EXCEL solves for cubic splines, Z(W)
Package: sol’n data block & interpolator
W
Cubic Spline
W
1
g
X
0
0
W
1
Z
+
0
0
J. Philip Barnes www.HowFliesTheAlbatross.com
W
1
Parametric cubic spline airfoil
Sample Gauss-Seidel convergence
J. Philip Barnes www.HowFliesTheAlbatross.com
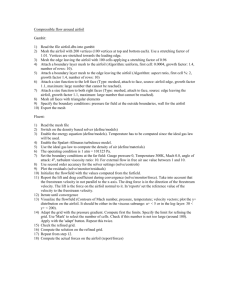
Parametric cubic spline airfoil ~ 13-point match
Parametric cubic spline
(blue) closely matches
target (white points)
J. Philip Barnes www.HowFliesTheAlbatross.com
Parametric cubic-spline airfoil ~ NLF(1)-0416 ~ 9-pt match
Upp. L.E. rad., Ru=r/c
0.0130
Low. L.E. rad., RL=r/c
0.0130
0.20
fwd upper, Xfu
0.1500
fwd lower, XfL
0.1500
0.05
fwd upper, Zfu
0.0900
fwd lower, ZfL
-0.0480
mid upper, Xmu
0.4500
mid lower, XmL
0.4500
mid upper, Zmu
0.0950
mid lower, ZmL
-0.0520
0.14286
0.70700
0.06143
0.71429
0.15306
0.68289
0.06538
0.69388
0.16327
0.65830
0.06926
0.67347
0.17347
0.63324
0.07304
0.65306
0.18367
0.60774
0.07671
0.63265
0.10
0.19388
0.58182
0.08025
0.61224
0.20408
0.55555
0.08363
0.59184
0.21429
0.52896
0.08683
0.57143
0.22449
0.50211
0.08984
0.55102
0.23469
0.47507
0.09263
0.53061
0.24490
0.44791
0.09519
0.51020
0.25510
0.42072
0.09747
0.48980
0.06
0.26531
0.39356
0.09944
0.46939
0.27551
0.36654
0.10104
0.44898
0.28571
0.33974
0.10219
0.42857
0.29592
0.31326
0.10286
0.04
0.40816
0.30612
0.28721
0.10298
0.38776
0.31633
0.26168
0.10249
0.36735
spline
0.32653
0.23678
0.10133
0.34694
Target Airfoil
0.33673
0.21261
0.09945
0.32653
0.34694
0.18927
0.09679
0.30612
0.35714
0.16688
0.09330
0.28571
0.36735
0.14552
0.08891
0.00
0.26531
0.12530
0.08362
0.24490
0.38776
0.10631
0.07757
0.22449
0.40816
0.07238
0.06371
0.18367
0.41837
0.05760
0.05618
0.16327
specifications
0.42857
0.04438
0.04844
0.14286
0.43878
spline
0.03279
0.04063
0.12245
-0.04
0.44898
0.02288
0.03288
0.10204
0.45918
0.01470
0.02534
0.08163
0.46939
0.00829
0.01814
0.06122
0.47959
0.00369
0.01142
Aft lower
0.04082
0.48980
0.00092
0.00533
0.02041
0.50000
0.00000
0.00000
0.00000
0.50000
0.8
0.00000
0.9
0.00000
1.0
0.000000.0
0.51020
0.00092
-0.00481
0.02041
0.52041
Upper & Lower 1st Derivatives, dZ/dW Vs. 0.53061
W
0.00369
-0.00945
0.04082
0.00829
-0.01389
0.54082
0.01470
-0.01815
0.06122
5.0
0.08163
0.55102
0.02288
-0.02221
0.10204
4.0
0.56122
0.03279
-0.02609
0.57143
0.04438
-0.02976
0.12245
3.0
0.14286
0.58163
0.05760
-0.03323
0.59184
0.07238
-0.03650
0.60204
0.08864
-0.03956
0.61224
0.8
0.62245
0.10631
0.9
0.12530
-0.04241
1
-0.04505
0.63265
0.14552
-0.04747
0.64286
0.16688
-0.04967
0.65306
0.18927
-0.05163
0.66327
0.21261
-0.05333
0.30612
-2.0
0.32653
0.67347
0.23678
-0.05473
0.34694
-3.0
0.68367
0.26168
-0.05580
0.69388
0.28721
-0.05654
0.36735
-4.0
0.38776
Z(X)
0.15
W
0.10
NLF(1)-0416
0.00
-0.05
W
-0.10
-0.15
0.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
1.00
0.75
Upper
X(u)
Lower
0.50
0.25
1
W
0
W 0.37755
0.00
aft upper, Xau
0.8000
aft lower, XaL
0.8000
aft upper, Zau
0.0450
aft lower, ZaL
0.0000
Upp. aft slope, bu, deg
14.00
Low. aft slope, bL, deg
-14.00
Half trailing-edge, Za
0.0030
0.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.15
Z(u)
0.10
0.05
0.00
Aft upper
-0.05
0
U
0.9
0.08864
1.0
1
1.0
0.07088
1
0.1
0.6
0.2
0.3
0.4
0.5
0.6
0.7
0.2
0
0
-0.2
-0.4
-0.6
Z(X)
0.08
0.02
specifications
0.20408
-0.02
-0.06
-0.08
0.0
Phil's web site
RUN
0.8
0.39796
0.9
-0.10
0.4
Public Domain
J. Philip Barnes
0.8
0.12
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1.0
0.9
1
Upper and Lower 2nd Derivatives, d2Z/dW2
0.16327
2.0
0.18367
0.20408
1.0
0.22449
0.0
0.24490
0
0.26531
-1.0
0.28571
0.1
0.2
0.3
J. Philip Barnes www.HowFliesTheAlbatross.com
0.4
0.5
0.6
0.7
0.8
Parametric cubic-spline airfoil ~ PCS-001 ~ new design
X = 1 - (1 - g) cos (pW/2) - g cos (3pW/2)
Upp. L.E. rad., Ru=r/c
0.0120
Low. L.E. rad., RL=r/c
0.0120
fwd upper, Xfu
0.1500
fwd lower, XfL
0.1500
fwd upper, Zfu
0.1000
fwd lower, ZfL
-0.0204
mid upper, Xmu
0.5800
mid lower, XmL
0.4500
mid upper, Zmu
0.1345
mid lower, ZmL
-0.0200
0.20
W
Z(X)
0.15
0.10
PCS-001
0.05
0.00
W
-0.05
-0.10
-0.15
0.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
1.00
0.75
Upper
X(u)
Lower
0.50
0.25
1
W
0
0.00
aft upper, Xau
0.8000
aft lower, XaL
0.8000
aft upper, Zau
0.0630
aft lower, ZaL
-0.0130
Upp. aft slope, bu, deg
8.00
Low. aft slope, bL, deg
3.50
Half trailing-edge, Za
0.0010
0.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.15
Z(u)
0.10
0.05
0.00
Aft upper
-0.05
0.09871
0.71429
0.15306
0.68289
0.10702
0.69388
0.16327
0.65830
0.11486
0.67347
0.17347
0.63324
0.12209
0.65306
spline
0.18367
0.60774
0.12856
0.63265
0.14
Target Airfoil
0.19388
0.58182
0.13415
0.61224
0.20408
0.55555
0.13872
0.59184
0.21429
0.52896
0.14227
0.57143
0.22449
0.50211
0.14485
0.55102
0.23469
0.47507
0.14649
0.53061
0.24490
0.44791
0.14722
0.51020
0.25510
0.42072
0.14708
0.48980
0.10
0.26531
0.39356
0.14610
0.46939
0.27551
0.36654
0.14433
0.44898
0.28571
0.33974
0.14179
0.42857
0.29592
0.31326
0.13852
0.08
0.40816
0.30612
0.28721
0.13456
0.38776
0.31633
0.26168
0.12995
0.36735
0.32653
0.23678
0.12471
0.34694
0.33673
0.21261
0.11889
0.32653
0.34694
0.18927
0.11251
0.30612
0.35714
0.16688
0.10563
0.28571
0.36735
W
0.37755
0.14552
0.09826
0.04
0.26531
0.12530
1
0.09047
0.38776
0.10631
0.08236
0.40816
0.07238
0.06554
0.18367
0.41837
0.05760
0.05704
0.16327
specifications
0.42857
0.04438
0.04861
0.14286
0.43878
spline
0.03279
0.04035
0.12245
0.00
0.44898
0.02288
0.03236
0.10204
0.45918
0.01470
0.02475
0.08163
0.46939
0.00829
0.01760
0.06122
0.47959
0.00369
0.01103
0.04082
0.00513
0.02041
0.8
0.8
0.39796
0.9
0.9
0.08864
Aft lower
0.00092
1.0
1.0
0.07401
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.2
0
-0.4
-0.6
specifications
0.12
0.06
0.24490
0.22449
0.20408
0.02
-0.02
0.00000
0.00000
0.00000
0.50000
0.8
0.00000
0.9
0.00000
1.0
0.000000.0
0.51020
0.00092
-0.00436
0.02041
0.52041
Upper & Lower 1st Derivatives, dZ/dW Vs. W
0.6
-0.2
Z(X)
-0.04
0.0
0
0.16
0.50000
-0.10
Phil's web site
RUN
0.70700
0.48980
0.4
Public Domain
J. Philip Barnes
0.14286
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.00369
-0.00805
0.04082
0.53061
0.00829
-0.01113
0.54082
0.01470
-0.01365
0.06122
5.0
0.08163
0.55102
0.02288
-0.01567
4.0
0.10204
0.56122
0.03279
-0.01724
0.57143
0.04438
-0.01842
0.12245
3.0
0.14286
0.58163
0.05760
-0.01927
0.59184
0.07238
-0.01983
0.60204
0.08864
-0.02017
0.61224
0.8
0.62245
0.10631
0.9
0.12530
-0.02034
1
-0.02040
0.63265
0.14552
-0.02040
0.64286
0.16688
-0.02039
0.65306
0.18927
-0.02039
0.66327
0.21261
-0.02040
0.30612
-2.0
0.32653
0.67347
0.23678
-0.02040
-3.0
0.34694
0.68367
0.26168
-0.02040
0.69388
0.28721
-0.02039
0.36735
-4.0
0.38776
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1.0
0.9
1
Upper and Lower 2nd Derivatives, d 2Z/dW2
0.16327
2.0
0.18367
0.20408
1.0
0.22449
0.0
0.24490
0
0.26531
-1.0
0.28571
0.1
0.2
0.3
J. Philip Barnes www.HowFliesTheAlbatross.com
0.4
0.5
0.6
0.7
0.8
Laminar airfoil study ~ integrated geometric/aero design
f
Theodorsen
Angle (f)
Parametric
cubic spline
• Velocity ratio
Discontinuous 3rd-deriv.
of cubic spline does not
disrupt smooth airflow
• Pressure coefficient
Parametric Fuselage – cubic spline & trig. compared
cubic-spline basis
Trig. functions provide 99% desired
result with just 1% of computation
J. Philip Barnes www.HowFliesTheAlbatross.com
Parametric wing: cubic spline throughout (EXCEL/VB)
symbol
c
bo0
bo1
u
Z=z/c
Ev_
v
wo
do
s
xb
yb
zb
g
TBD
description
local chord
v→
chord, c
Ev0↓
0
0.0000
1.0000
0.2000
0.6600
0.4000
0.3800
0.7500
0.1800
1.0000
0.0200
Ev1↓
1
u
x
y
z
upper tr. edge boattail angle
station, v = 0:1 →
bo0
0
7.0000
9.0000
9.9000
10.0000
10.0000
1
0
0.5
0
0.0015
lower tr. edge boattail angle
c'clockwise from upper t.e., 0:1
foil vertical coord. (local)
bo1
u1
Z1
u2
Z2
u3
Z3
u4
Z4
u5
Z5
0
0
0
0
0
0
0
0
0
0
0
13.0000
0.0000
0.001
0.25
0.1
0.5
0
0.75
-0.05
1
-0.001
11.0000
0.0000
0.001
0.25
0.1
0.5
0
0.75
-0.05
1
-0.001
10.1000
0.0000
0.001
0.25
0.1
0.5
0
0.75
-0.05
1
-0.001
10.0000
0.0000
0.001
0.25
0.1
0.5
0
0.75
-0.05
1
-0.001
10.0000
0.0000
0.001
0.25
0.1
0.5
0
0.75
-0.05
1
-0.001
1
1
1
1
1
1
1
1
1
1
1
0.049734
0.103766
0.165539
0.236968
0.318051
0.406877
0.5
0.593123
0.681949
0.763032
0.834461
0.399053
0.283219
0.137789
-0.04563
-0.25242
-0.42884
-0.5
-0.42884
-0.25242
-0.04564
0.137787
0
0
0
0
0
0
0
0
0
0
0
0.023936
0.05198
0.081196
0.099866
0.088465
0.047867
0.0005
-0.02937
-0.0435
-0.05047
-0.05302
washout (trailing-edge up)
wo
0
0
1
3.2
6.1
8
1
0.896235 0.283217
dihedral (local x-rotation)
spar chord sta. (x-xLE)/c (local)
spar backbone x (global coord.)
spar backbone y
spar backbone z
0.0:0.10 option moves Zmax aft
spare parameter
do
s
xb
yb
zb
g
0
0
0
1
0
0
0
1
0.5
0
0
0.0900
0
1
0.35
0.2
0.034
0.0900
0
1
0.35
0.4
0.074
0.0900
0
1
0.46
0.75
0.09
0.0900
0
1
0.54
1
0.09
0.0900
1
1
1
1
1
1
0.950266 0.399052
1
0.499999
spline start/end edge constraints
sparwise parameter, 0:1
Edit columns 4-10, open VB editor and click the Run icon
1.25
zp(xp)
0.75
0.25
zp
c
1
z1
0.001
u2
0.25
z2
0.1
u3
0.5
z3
0
u4
0.75
0
0.001
0.25
0.1
0.5
0
0.75
0.351654
0.258874
0.131747
-0.04623
-0.26756
-0.46766
-0.54374
-0.45139
-0.25246
-0.04341
0.124879
12.3367
y(x)
11.77222
11.21597
10.76135
10.44225
10.23963
10.12844
10.06526
10.02352
10.00142
9.994773
0
0
0
0
0
0
0
0
0
0
0
0.001
0.001
0.001
0.001
0.001
0.001
0.001
0.001
0.001
0.001
0.001
0.25
0.25
0.25
0.25
0.25
0.25
0.25
0.25
0.25
0.25
0.25
0.1
0.1
0.1
0.1
0.1
0.1
0.1
0.1
0.1
0.1
0.1
0.5
0.5
0.5
0.5
0.5
0.5
0.5
0.5
0.5
0.5
0.5
0
0
0
0
0
0
0
0
0
0
0
0.75
0.75
0.75
0.75
0.75
0.75
0.75
0.75
0.75
0.75
0.75
0
-0.04648 0.249268 0.086731 0.702586 0.203931 10.00303 9.996974
0
0.001
0.25
0.1
0.5
0
0.75
0
0
0
0
0
0
0
0
0
0.001
0.001
0.001
0.001
0.001
0.001
0.001
0.25
0.25
0.25
0.25
0.25
0.25
0.25
0.1
0.1
0.1
0.1
0.1
0.1
0.1
0.5
0.5
0.5
0.5
0.5
0.5
0.5
0
0
0
0
0
0
0
0.75
0.75
0.75
0.75
0.75
0.75
0.75
0.094122
0.137865
0.180979
0.225
0.271468
0.321684
0.376489
0.436094
0.5
0.566996
0.635267
0.894321
0.800195
0.701419
0.610098
0.530646
0.461477
0.401712
0.350225
0.306187
0.268707
0.235607
0
0.049734
0.103766
0.165539
0.483562
0.385768
0.27355
0.132667
0.048455
0.048455
0.048455
0.048455
0.236968
0.318051
0.406877
0.5
0.593123
0.681949
0.763032
-0.5
0.834461
0.896235
0.950266
1
z(y)
-0.045
-0.24527
-0.41609
-0.48496
-0.416
-0.24512
-0.04484
0
0.132812
0.273656
0.385825
0.483563
0.048455
0.048455
0.048455
0.048455
0.048455
0.048455
0.048455
0.048455
0.048455
0.048455
0.048455
0.099023
0.08762
0.048145
0.00225
-0.02667
-0.0402
-0.04658
0.5
-0.04857
-0.04193
-0.02524
0.002376
-0.07843
-0.28996
-0.48009
-0.5521
-0.46415
-0.27423
-0.07371
1
0.088442
0.208591
0.300795
0.380288
0.097187
-0.01059
-0.13695
-0.21505
-0.19955
-0.11924
-0.02676 1.5
0.050896
0.114697
0.172157
0.231259
0
0.446655
0.049734 0.356289
0.00 0.103766 0.252592
0.165539 0.122426
0.236968 -0.04168
-0.25
0.318051 -0.22657
-1
-0.75
-0.5
0.406877 -0.38419
0.094122
0.094122
0.094122
0.094122
0.094122
0.094122
-0.25
0.094122
0.01115
0.031961
0.056873
0.082011
0.097215
0.08584
0
0.048998
0.321105
0.251539
0.16695
0.052472
-0.10497
-0.29704
0.25
-0.46825
0.248783
0.232826
0.214296
0.183813
0.126737
0.029879
0.5
0.75
-0.0832
-0.25
-0.75
RUN
-1.25
-1
0.50
b1
13
u1
0
0.190995
0.168472
0.132356
0.065076
-0.04973
-0.1841
-0.2664
-0.24846
-0.16176
-0.06294
0.019427
v
0
-0.0293 0.344731 0.147184 0.766574 0.171026
-0.0005 0.427217 0.209342 0.825 0.136872
0.876085 0.104408
0.004313 0.380554 0.232849 0.918767 0.075956
0.026299 0.306532 0.214557 0.952901 0.052623
0.053419 0.216183 0.193818 0.979357 0.034331
0.081408 0.092947 0.160205 1.000001
0.02
Phil Barnes, 08 Mar 2015
Summary
The table above represents one half wing.
Half-wing geometry is parametric with (u,v) using cubic splines, airfoil c'clockwise Vs. u, sparwise Vs. v
Input one column per wing "sparwise" station, including the local airfoil as a column (5-points for now)
Spline-edge integer constraints are [not] used for the airfoil ; set the boattail slopes (+ for typical foil)
x/c for the airfoil is an output: x/c = 1-sin(pu), given (u) as an input. x/c is optionally modified with g.
Airfoil "spline Left and Right" (lower t.e., upper t.e.) edge slopes (dz/du) are then given by -p tanb
Spline-edge constraints are used versus sparwise position for all other parameters, i.e. c(v), b(v),...
Sparwise position (v) has an airfoil "backbone" point at xb,yb,zb (global)
The spar backbone chordwise station s = (x-xLE)/c, nominally 0.25, is anywhere from 0.0-to-1.0
The airfoil is first translated such that its backbone is anchored to the backbone global position
The airfoil is then "washed out" (trailing edge up), rotating about a local y-axis thru the backbone pt.
The airfoil is then rotated about a local x-axis thru the backbone point by the dihedral angle (d).
xp
b0
7
0.427531 0.210985 0.048455 0.968519 7.200982 12.79902
1.25
7.663301
8.227776
1.00
8.784027
9.238646
9.557754
0.75
9.760373
9.871555
9.934743
0.50
9.976475
9.998582
0.25
10.00523
0.00
9.999158
9.997489
9.99737
-0.25
9.997956
9.998722
-0.50
9.999423
10
10.00084
10.00251
10.00263
10.00204
10.00128
10.00058
10
-0.75
-1.00
-1.25
-1
2
-0.75
-0.5
-0.25
0
0.25
0.5
0.75
1
-0.5
-0.25
0
0.25
0.5
0.75
1
0.50
z(x)
0.25
0.25
J. Philip Barnes www.HowFliesTheAlbatross.com
0.00
-0.25
1
-1
-0.75
Application: Dynamic soaring in the jet stream
Energy From an Atmosphere in Motion - Dynamic Soaring and Regen-electric Flight Compared
J. Philip Barnes www.HowFliesTheAlbatross.com
22
Application: Regen of electrical power in ridge lift
J. Philip Barnes www.HowFliesTheAlbatross.com
About the Author
Phil Barnes has a Master’s Degree in Aerospace Engineering
from Cal Poly Pomona and BSME from the University of
Arizona. He is a Principal Engineer and 34-year veteran of
air vehicle and subsystems performance analysis at
Northrop Grumman, where he presently supports both
mature and advanced tactical aircraft programs. Author of
several SAE and AIAA technical papers, and often invited to
lecture at various universities, Phil is presently leading
several Northrop Grumman-sponsored university research
projects including an autonomous thermal soaring
demonstration, passive bleed-and-blow airfoil wind-tunnel
test, and application of Blender 3D software for flight
simulation. This presentation includes highlights of one such
collaboration (public domain) using EXCEL/Visual Basic and
Blender 3D with its resident Python programming language
to parameterize and visualize aircraft geometry. Outside of
work, Phil is a leading expert on dynamic soaring, and he is
pioneering the science of regen-electric flight.
J. Philip Barnes www.HowFliesTheAlbatross.com