Evolutionary multi-objective optimization
advertisement

Evolutionary Multi-objective
Optimization – A Big Picture
Karthik Sindhya, PhD
Postdoctoral Researcher
Industrial Optimization Group
Department of Mathematical Information Technology
Karthik.sindhya@jyu.fi
http://users.jyu.fi/~kasindhy/
Objectives
The objectives of this lecture are to:
1. Discuss the transition: Single objective optimization
to Multi-objective optimization
2. Review the basic terminologies and concepts in use
in multi-objective optimization
3. Introduce evolutionary multi-objective optimization
4. Goals in evolutionary multi-objective optimization
5. Main Issues in evolutionary multi-objective
optimization
Reference
• Books:
– K. Deb. Multi-Objective Optimization using
Evolutionary Algorithms. Wiley, Chichester, 2001.
– K. Miettinen. Nonlinear Multiobjective
Optimization. Kluwer, Boston, 1999.
Transition
Minimize: Cost
Single objective: Maximize Performance
Maximize: Performance
Basic terminologies and concepts
• Multi-objective problem is usually of the form:
Minimize/Maximize f(x) = (f1(x), f2(x),…, fk(x))
subject to
gj(x) ≥ 0
Multiple objectives,
hk(x) = 0
constraints and decision
variables
xL ≤ x ≤ xU
Decision space
Objective space
Basic terminologies and concepts
– solution a dominates
solution b, if
• a is no worse than b in
all objectives
• a is strictly better than
b in at least one
objective.
1
2
5
f2 (minimize)
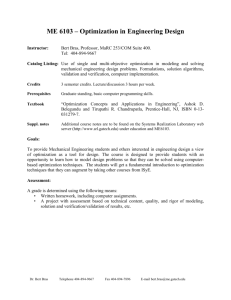
• Concept of nondominated solutions:
3
4
2
3
2
4
5
6
f1 (minimize)
• 3 dominates 2 and 4
• 1 does not dominate 3 and 4
• 1 dominates 2
Basic terminologies and concepts
• Properties of dominance relationship
– Reflexive: The dominance relation is not reflexive.
• Since solution a does not dominate itself.
– Symmetric: The dominance relation is not symmetric.
• Solution a dominates b does not mean b dominated a.
• Dominance relation is asymmetric.
• Dominance relation is not antisymmetric.
– Transitive: The dominance relation is transitive.
• If a dominates b and b dominates c, then a dominates c.
• If a does not dominate b, it does not mean b
dominates a.
Basic terminologies and concepts
• Finding Pareto-optimal/non-dominated solutions
– Among a set of solutions P, the non-dominated set of
solutions P’ are those that are not dominated by any
member of the set P.
• If the set of solutions considered is the entire feasible
objective space, P’ is Pareto optimal.
– Different approaches available. They differ in
computational complexities.
• Naive and slow
– Worst time complexity is 0(MN2).
• Kung et al. approach
– O(NlogN)
Basic terminologies and concepts
• Kung et al. approach
5
• Ascending order for
minimization objective
2
P = {5,1,3,2,4}
f2 (minimize)
– Step 1: Sort objective 1
based on the descending
order of importance.
1
2
3
4
3
5
2
4
5
f1 (minimize)
6
Basic terminologies and concepts
P = {5,1,3,2,4}
Front = {5}
T = {5,1,3}
{5,1}
{5}
B = {2,4}
{3}
Front = {5}
{1}
Front(P) = {5}
{2}
Front = {2,4}
{4}
Basic terminologies and concepts
• Non-dominated sorting of population
– Step 1: Set all non-dominated fronts Pj , j = 1,2,…
as empty sets and set non-domination level
counter j = 1
– Step 2: Use any one of the approaches to find the
non-dominated set P’ of population P.
– Step 3: Update Pj = P’ and P = P\P’.
– Step 4: If P ≠ φ, increment j = j + 1 and go to Step
2. Otherwise, stop and declare all non-dominated
fronts Pi, i = 1,2,…,j.
Basic terminologies and concepts
f2 (minimize)
1
4
5
3
f1 (minimize)
Front 2
f2 (minimize)
Front 3
Front 1
2
f1 (minimize)
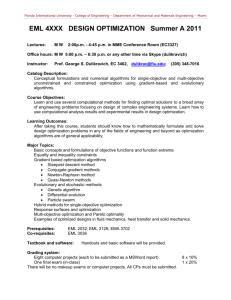
Basic terminologies and concepts
• Pareto optimal fronts (objective space)
– For a K objective problem, usually Pareto front is K-1 dimensional
Min-Max
Max-Max
Min-Min
Max-Min
Basic terminologies and concepts
• Local and Global Pareto optimal front
– Local Pareto optimal front: Local dominance check.
Objective space
Decision space
Locally Pareto optimal front
– Global Pareto optimal front is also local Pareto
optimal front.
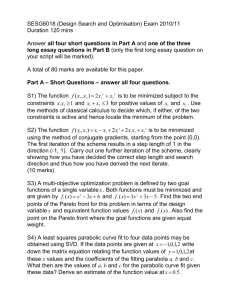
Basic terminologies and concepts
• Ideal point:
– Non-existent
– lower bound of the Pareto front.
Objective space
– Upper bound of the Pareto front.
f2
• Nadir point:
Znadir
Min-Min
• Normalization of objective vectors:
– fnormi = (fi - ziutopia )/(zinadir - ziutopia )
• Max point:
– A vector formed by the maximum objective ε
function values of the entire/part of objective
space.
– Usually used in evolutionary multi-objective
optimization algorithms, as nadir point is
difficult to estimate.
– Used as an estimate of nadir point and
updated as and when new estimates are
obtained.
Zmaximum
Zideal
Zutopia
ε
f1
Basic terminologies and concepts
• What are evolutionary
multi-objective
optimization algorithms?
– Evolutionary algorithms
used to solve multiobjective optimization
problems.
• EMO algorithms use a
population of solutions to
obtain a diverse set of
solutions close to the Pareto
optimal front.
Objective space
Basic terminologies and concepts
• EMO is a population based approach
– Population evolves to finally converge on to the
Pareto front.
• Multiple optimal solutions in a single run.
• In classical MCDM approaches
– Usually multiple runs necessary to obtain a set of
Pareto optimal solutions.
– Usually problem knowledge is necessary.
Goal in evolutionary multi-objective optimization
• Goals in evolutionary multi-objective
optimization algorithms
– To find a set of solutions as close as possible to
the Pareto optimal front.
– To find a set of solutions as diverse as possible.
– To find a set of satisficing solutions reflecting the
decision maker’s preferences.
• Satisficing: a decision-making strategy that attempts to
meet criteria for adequacy, rather than to identify an
optimal solution.
Goal in evolutionary multi-objective optimization
Objective space
Convergence
Diversity
Goal in evolutionary multi-objective optimization
Objective space
Convergence
Goal in evolutionary multi-objective optimization
• Changes to single objective evolutionary
algorithms
– Fitness computation must be changed
– Non-dominated solutions are preferred to
maintain the drive towards the Pareto optimal
front (attain convergence)
– Emphasis to be given to less crowded or isolated
solutions to maintain diversity in the population
Goal in evolutionary multi-objective optimization
• What are less-crowded solutions ?
– Crowding can occur in decision space and/or objective
phase.
• Decision space diversity sometimes are needed
– As in engineering design problems, all solutions would look the
same.
Objective space
Min-Min
Decision space
Main Issues in evolutionary multi-objective optimization
• How to maintain diversity and obtain a diverse
set of Pareto optimal solutions?
• How to maintain non-dominated solutions?
• How to maintain the push towards the Pareto
front ? (Achieve convergence)
EMO History
• 1984 – VEGA by Schaffer
• 1989 – Goldberg suggestion
• 1993-95 - Non-Elitist methods
– MOGA, NSGA, NPGA
• 1998 – Present – Elitist methods
– NSGA-II, DPGA, SPEA, PAES etc.