Thread
advertisement

Thread
Thread
•
A basic unit of CPU utilization. It comprises a thread ID, a program counter, a register set, and
a stack. It is a single sequential flow of control within a program
•
It shares with other threads belonging to the same process its code section, data section, and
other OS resources, such as open files and signals
•
A traditional (or heavyweight) process has a single thread of control
•
If a process has multiple threads of control, it can perform more than one task at a time.
Threads are a way for a program to split itself into two or more simultaneously running tasks.
That is the real excitement surrounding threads
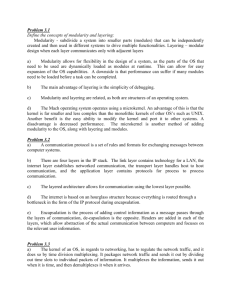
Single and Multithreaded
Processes
Thread Examples
A word processor may have a thread for displaying
graphics, another thread for responding to
keystrokes from the user, and a third thread for
performing spelling and grammar checking in the
background
Thread Example: Multithreaded
Server Architecture
Single-Threaded Example
• Imagine the following C program
main() {
ComputePI(“pi.txt”);
PrintClassList(“clist.text”);
}
• What is the behavior here?
Use of Threads
• Version of program with Threads
main() {
CreateThread(ComputePI(“pi.txt”));
CreateThread(PrintClassList(“clist.text”));
}
• What does “CreateThread” do?
– Start independent thread running given procedure
• What is the behavior here?
– This should behave as if there are two separate CPUs
CPU1
CPU2
Time
CPU1
CPU2
CPU1
CPU2
Memory Footprint of Two-Thread Example
• If we stopped this program and examined it
with a debugger, we would see
Stack 1
– Two sets of CPU registers
Heap
Global Data
Code
Address Space
– Two sets of Stacks
Stack 2
Per Thread State
• Each Thread has a Thread Control Block (TCB)
– Execution State: CPU registers, program counter, pointer to stack
– Scheduling info: State (more later), priority, CPU time
– Accounting Info
– Various Pointers (for implementing scheduling queues)
– Pointer to enclosing process (PCB)
– Etc
Benefits
• Responsiveness
• Resource Sharing
• Economy
• Utilization of MP Architectures
Multithreading Models
• Support for threads may be provided either at the user level,
for user threads (supported above the kernel and managed
without kernel support), or by the kernel, for kernel threads
(supported and managed directly by the OS)
• Three common ways of establishing relationship between
user and kernel threads
– Many-to-One
– One-to-One
– Many-to-Many
User Threads
• Thread management done by user-level
threads library
• Three primary thread libraries:
– POSIX Pthreads
– Win32 threads
– Java threads
Kernel Threads
• Supported by the Kernel
• Examples
– Windows XP/2000
– Solaris
– Linux
– Tru64 UNIX
– Mac OS X
Many-to-One (User-Level Threads)
• Many user-level threads mapped to single kernel thread
Many-to-One (User-Level Threads)
• Basically, the kernel is not aware of the existence of threads.
Thread switching does not require kernel mode privileges and
scheduling is application specific. Thread management is done
by the thread library in user space, so it is efficient
• Just as a uniprocessor provides the illusion of parallelism by
multiplexing multiple processes on a single CPU, user-level
threads packages provide the illusion of parallelism by
multiplexing multiple user threads on a single kernel thread
Many-to-One (User-Level Threads)
• Since there is only one kernel thread, if a user thread executes
a blocking system call, the entire process blocks, since no
other user thread can execute until the kernel thread (which
is blocked in the system call) becomes available
• Multithreaded programs will run no faster on multiprocessors
than they run on uniprocessors. The single kernel thread acts
as a bottleneck, preventing optimal use of the multiprocessor
Many-to-One (User-Level Threads)
• Advantages
– Thread switching does not involve kernel no mode switching
– Scheduling can be application specific choose best algorithm
– ULTs can run on any OS only needs a thread library
• Disadvantages
– Most system calls are blocking and the kernel blocks processes all
threads within the process will be blocked
– Kernel can only assign processes to processors threads within same
process cannot run simultaneously on processors
One-to-One (Kernel-Level Threads)
• Each user-level thread maps to kernel thread
One-to-One (Kernel-Level Threads)
• Because each kernel thread is actually a different kernel-schedulable
entity, multiple threads can run concurrently on different processors
– Can achieve significant speedups when migrated from uniprocessors to
multiprocessors
• Unlike the many-to-one model, threads blocking in the kernel do not
impede process progress under the one-to-one model. When one user
thread and its kernel thread block, the other user threads can continue to
execute since their kernel threads are unaffected
• The only drawback is that creating a user thread requires creating the
corresponding kernel thread
– Overhead of creating kernel threads can burden the performance of the
application
Many-to-Many Model
• Allows many user-level threads to be mapped to many kernel
threads
• Idea is to combine the best of both approaches
Solaris combines both ULT and KLT
Thread Libraries
• A thread library provides the programmer with an API for
creating and managing threads
• Two primary ways of implementing a thread library
– Provide the library entirely in user space with no kernel support. All
code and data structures for the library exist in user space. Invoking a
function in the library results in a local function in user space and not
a system call
– Implement kernel-level library supported directly by the OS. In this
case, code and data structures for the library exist in kernel space.
Invoking a function results in a system call to the kernel
– Three main thread libraries in use today: (1) POSIX Pthreads, (2)
Win32, and (3) Java
Pthreads
• Example: Design a multithreaded program
that performs the following summation in a
separate thread
N
sum = i
i=0
Pthreads
#include <pthread.h>
#include <stdio.h>
int sum; //this data is shared by the thread(s)
void *runner(void *param); // the thread
main(int argc, char* argv[])
{
pthread_t tid; // the thread identifier
pthread_create(&tid,NULL,runner,argv[1]); // create thread
pthread_join(tid,NULL); // now wait for the thread to exit
printf("sum = %d\n",sum);
}
Pthreads
void *runner(void *param) {
int upper = atoi(param);
int i;
sum = 0;
if (upper > 0) {
for (i = 1; i <= upper; i++)
sum += i;
}
pthread_exit(0);
}
Threading Issues
• Semantics of fork() and exec()
system calls
• Thread cancellation of target thread
– Asynchronous or deferred
•
•
•
•
Signal handling
Thread pools
Thread-specific data
Scheduler activations
Thread Cancellation
• Terminating a thread before it has
finished
• Two general approaches:
– Asynchronous cancellation
terminates the target thread
immediately
– Deferred cancellation allows the
target thread to periodically check if
it should be cancelled
Semantics of fork()and exec()
• If one thread in a program calls fork(), does the new
process duplicate only the calling thread or all threads?
– Some UNIX systems provide two versions of fork()
– One duplicates all threads
– The other duplicates only the thread that invoked fork()
• The exec() system call typically works in the same way as
described before. That is, if a thread invokes exec(), the
program specified in the parameter to exec() will replace
the entire process – including all threads
Signal Handling
•
•
Signals are used in UNIX systems to notify a
process that a particular event has occurred
A signal handler is used to process signals
1. Signal is generated by particular event
2. Signal is delivered to a process
3. Signal is handled
•
Options:
– Deliver the signal to the thread to which the signal
applies
– Deliver the signal to every thread in the process
– Deliver the signal to certain threads in the process
– Assign a specific thread to receive all signals for the
process
Thread Pools
• Create a number of threads in a pool
where they await work
• Advantages:
– Usually slightly faster to service a request
with an existing thread than create a new
thread
– Allows the number of threads in the
application(s) to be bound to the size of
the pool
Thread Specific Data
• Allows each thread to have its own
copy of data
• Useful when you do not have
control over the thread creation
process (i.e., when using a thread
pool)
Scheduler Activations
• Both M:M and Two-level models require
communication to maintain the
appropriate number of kernel threads
allocated to the application
• Scheduler activations provide upcalls - a
communication mechanism from the
kernel to the thread library
• This communication allows an
application to maintain the correct
number kernel threads
Operating System Examples
• Windows XP Threads
• Linux Thread
Windows XP Threads
Linux Threads
Windows XP Threads
• Implements the one-to-one mapping, kernel-level
• Each thread contains
–
–
–
–
A thread id
Register set
Separate user and kernel stacks
Private data storage area
• The register set, stacks, and private storage area
are known as the context of the threads
• The primary data structures of a thread include:
– ETHREAD (executive thread block)
– KTHREAD (kernel thread block)
– TEB (thread environment block)
Linux Threads
• Linux refers to them as tasks
rather than threads
• Thread creation is done
through clone() system call
• clone() allows a child task to
share the address space of
the parent task (process)