slides
advertisement

Machine Learning for Signal
Processing
Fundamentals of Linear Algebra
Class 2. 22 Jan 2015
Instructor: Bhiksha Raj
3/23/2016
11-755/18-797
1
Overview
•
•
•
•
Vectors and matrices
Basic vector/matrix operations
Various matrix types
Projections
3/23/2016
11-755/18-797
2
Book
• Fundamentals of Linear Algebra, Gilbert Strang
• Important to be very comfortable with linear algebra
– Appears repeatedly in the form of Eigen analysis, SVD, Factor
analysis
– Appears through various properties of matrices that are used in
machine learning
– Often used in the processing of data of various kinds
– Will use sound and images as examples
• Today’s lecture: Definitions
– Very small subset of all that’s used
– Important subset, intended to help you recollect
3/23/2016
11-755/18-797
3
Incentive to use linear algebra
• Simplified notation!
xT A y
y x a
j
j
i ij
i
• Easier intuition
– Really convenient geometric interpretations
• Easy code translation!
for i=1:n
for j=1:m
c(i)=c(i)+y(j)*x(i)*a(i,j)
end
end
3/23/2016
11-755/18-797
C=x*A*y
4
And other things you can do
Frequency
From Bach’s Fugue in Gm
Time
Rotation + Projection +
Scaling + Perspective
•
•
•
•
Decomposition (NMF)
Manipulate Data
Extract information from data
Represent data..
Etc.
3/23/2016
11-755/18-797
5
Scalars, vectors, matrices, …
• A scalar a is a number
– a = 2, a = 3.14, a = -1000, etc.
• A vector a is a linear arrangement of a collection of scalars
3.14
a 1 2 3, a
32
• A matrix A is a rectangular arrangement of a collection of
scalars
3.12 10
A
10.0
2
3/23/2016
11-755/18-797
6
Vectors in the abstract
• Ordered collection of numbers
– Examples: [3 4 5], [a b c d], ..
– [3 4 5] != [4 3 5] Order is important
• Typically viewed as identifying (the path from origin to) a location in an
N-dimensional space
(3,4,5)
5
(4,3,5)
3
z
y
4
x
3/23/2016
11-755/18-797
7
Vectors in reality
• Vectors usually hold sets of
numerical attributes
– X, Y, Z coordinates
[-2.5av 6st]
[1av 8st]
• [1, 2, 0]
– [height(cm) weight(kg)]
– [175 72]
– A location in Manhattan
• [3av 33st]
• A series of daily temperatures
[2av 4st]
• Samples in an audio signal
• Etc.
3/23/2016
11-755/18-797
8
Matrices
• Matrices can be square or rectangular
a b
a b
S
,
R
d e
c d
c
,
f
M
– Can hold data
• Images, collections of sounds, etc.
• Or represent operations as we shall see
– A matrix can be vertical stacking of row vectors
R da be
c
f
– Or a horizontal arrangement of column vectors
R da be
3/23/2016
c
f
11-755/18-797
9
Dimensions of a matrix
• The matrix size is specified by the number of rows and
columns
a
c b , r a b c
c
– c = 3x1 matrix: 3 rows and 1 column
– r = 1x3 matrix: 1 row and 3 columns
a b
a b
S
,
R
d e
c d
c
f
– S = 2 x 2 matrix
– R = 2 x 3 matrix
– Pacman = 321 x 399 matrix
3/23/2016
11-755/18-797
10
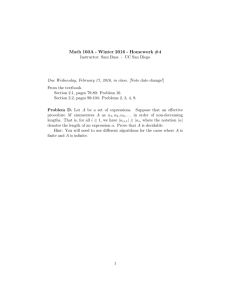
Representing an image as a matrix
• 3 pacmen
• A 321 x 399 matrix
– Row and Column = position
• A 3 x 128079 matrix
– Triples of x,y and value
• A 1 x 128079 vector
Y
X
v
1 1 . 2 . 2 2 . 2 . 10
1 2 . 1 . 5 6 . 10 . 10
1 1 . 1 . 0 0 . 1 . 1
1
1 . 1 1 . 0 0 0 . . 1
Values only; X and Y are
implicit
– “Unraveling” the matrix
• Note: All of these can be recast as the
matrix that forms the image
– Representations 2 and 4 are equivalent
• The position is not represented
3/23/2016
11-755/18-797
11
Basic arithmetic operations
• Addition and subtraction
– Element-wise operations
a1 b1 a1 b1
a1 b1 a1 b1
a b a2 b2 a2 b2 a b a2 b2 a2 b2
a3
b3
a3 b3
a3
b3
a3 b3
a11 a12 b11 b12 a11 b11 a12 b12
A B
a
a
b
b
a
b
a
b
21 22 21 22 21 21 22 22
3/23/2016
11-755/18-797
12
Vector Operations
3
(3,4,5)
5
-2
(3,-2,-3)
-3
4
(6,2,2)
3
• Operations tell us how to get from origin to the
result of the vector operations
– (3,4,5) + (3,-2,-3) = (6,2,2)
3/23/2016
11-755/18-797
13
Vector norm
• Measure of how long a vector is:
– Represented as x
a
(3,4,5)
Length = sqrt(32 + 42 + 52)
5
b ... a2 b2 ...2
• Geometrically
the shortest
distance to travel from the origin
to the destination
– As the crow flies
– Assuming Euclidean Geometry
4
3
[-2av 17st]
[-6av 10st]
• MATLAB syntax:
norm(x)
3/23/2016
11-755/18-797
15
Transposition
• A transposed row vector becomes a column (and vice versa)
a
y a b c , y T b
c
a
x b , x T a b c
c
• A transposed matrix gets all its row (or column) vectors
transposed in order
a b
X
d e
a
c T
, X b
f
c
• MATLAB syntax: a’
3/23/2016
d
e
f
M
11-755/18-797
, MT
16
Vector multiplication
• Multiplication by scalar
d a b c da db dc
a
ad
b .d bd
c
cd
• Dot product, or inner product
– Vectors must have the same number of elements
– Row vector times column vector = scalar
d
a b c e a d b e c f
f
• Outer product or vector direct product
– Column vector times row vector = matrix
a
a d a e a f
b d e f b d b e b f
c
c d c e c f
3/23/2016
11-755/18-797
17
Vector dot product
• Example:
– Coordinates are yards, not ave/st
– a = [200 1600],
b = [770 300]
[200yd 1600yd]
norm ≈ 1612
• The dot product of the two vectors
relates to the length of a projection
– How much of the first vector have we
covered by following the second one?
– Must normalize by the length of the
“target” vector
770
a b
a
T
3/23/2016
200 1600 300
393yd
200 1600
11-755/18-797
norm
≈ 393yd
[770yd 300yd]
norm ≈ 826
18
Vector dot product
E
C2
Sqrt(energy)
C
frequency
11
9 . 0 54 1 . . . 1
frequency
3
. 24 . . 16 . 14 . 1
frequency
0
. 0 . 3 0 . 13 . 0
• Vectors are spectra
– Energy at a discrete set of frequencies
– Actually 1 x 4096
– X axis is the index of the number in the vector
• Represents frequency
– Y axis is the value of the number in the vector
• Represents magnitude
3/23/2016
11-755/18-797
19
Vector dot product
E
C2
Sqrt(energy)
C
frequency
11
9 . 0 54 1 . . . 1
frequency
3
. 24 . . 16 . 14 . 1
frequency
0
. 0 . 3 0 . 13 . 0
• How much of C is also in E
– How much can you fake a C by playing an E
– C.E / |C||E| = 0.1
– Not very much
• How much of C is in C2?
– C.C2 / |C| /|C2| = 0.5
– Not bad, you can fake it
• To do this, C, E, and C2 must be the same size
3/23/2016
11-755/18-797
20
Vector outer product
• The column vector is the spectrum
• The row vector is an amplitude modulation
• The outer product is a spectrogram
– Shows how the energy in each frequency varies with time
– The pattern in each column is a scaled version of the spectrum
– Each row is a scaled version of the modulation
3/23/2016
11-755/18-797
21
Multiplying a vector by a matrix
• Generalization of vector scaling
a
ad
b .d bd
c
cd
– Left multiplication: Dot product of each vector pair
a1
AB
a 2
a1 b
b
a 2 b
– Dimensions must match!!
• No. of columns of matrix = size of vector
• Result inherits the number of rows from the matrix
3/23/2016
11-755/18-797
22
Multiplying a vector by a matrix
• Generalization of vector multiplication
d.a b c da db dc
– Right multiplication: Dot product of each vector
pair
A B a b1 b 2 a.b1 a.b 2
– Dimensions must match!!
• No. of rows of matrix = size of vector
• Result inherits the number of columns from the matrix
3/23/2016
11-755/18-797
23
Multiplication of vector space by matrix
0.3 0.7
Y
1.3 1.6
• The matrix rotates and scales the space
– Including its own vectors
3/23/2016
11-755/18-797
24
Multiplication of vector space by matrix
0.3 0.7
Y
1.3 1.6
• The normals to the row vectors in the matrix become the
new axes
– X axis = normal to the second row vector
• Scaled by the inverse of the length of the first row vector
3/23/2016
11-755/18-797
25
Matrix Multiplication
a
b
c
d
e
f
g
h
i
• The k-th axis corresponds to the normal to the hyperplane represented
by the 1..k-1,k+1..N-th row vectors in the matrix
– Any set of K-1 vectors represent a hyperplane of dimension K-1 or less
• The distance along the new axis equals inner product with the k-th row
vector
– Expressed in inverse-lengths of the vector
3/23/2016
11-755/18-797
26
Matrix Multiplication: Column space
a b
d e
x
c
a
b c
y x y z
f
d
e f
z
• So much for spaces .. what does multiplying a
matrix by a vector really do?
• It mixes the column vectors of the matrix
using the numbers in the vector
• The column space of the Matrix is the
complete set of all vectors that can be formed
by mixing its columns
3/23/2016
11-755/18-797
27
Matrix Multiplication: Row space
x
a b
y
d e
c
xa b c yd
f
e
f
• Left multiplication mixes the row vectors of
the matrix.
• The row space of the Matrix is the complete
set of all vectors that can be formed by mixing
its rows
3/23/2016
11-755/18-797
28
Matrix multiplication: Mixing vectors
X
1 3 0
. . 0
9 24 .
. . 1
Y
1
2
1
7
.
=
.
2
• A physical example
– The three column vectors of the matrix X are the spectra of
three notes
– The multiplying column vector Y is just a mixing vector
– The result is a sound that is the mixture of the three notes
3/23/2016
11-755/18-797
29
Matrix multiplication: Mixing vectors
200 x 200
200 x 200
200 x 200
0.25
0.75
2x1
40000 x 2
40000 x 1
• Mixing two images
– The images are arranged as columns
• position value not included
– The result of the multiplication is rearranged as an image
3/23/2016
11-755/18-797
30
Multiplying matrices
• Simple vector multiplication: Vector outer
product
a1
a1b1 a1b2
ab b1 b2
a
a
b
a
b
2 2
2
2 1
3/23/2016
11-755/18-797
31
Multiplying matrices
• Generalization of vector multiplication
– Outer product of dot products!!
a1
A B
a 2
a1 b1 a1 b2
b
b
2
1
a 2 b1 a 2 b2
– Dimensions
must match!!
• Columns of first matrix = rows of second
• Result inherits the number of rows from the first matrix
and the number of columns from the second matrix
3/23/2016
11-755/18-797
32
Multiplying matrices: Another
view
• Simple vector multiplication: Vector inner
product
ab a1
3/23/2016
b1
a2 a1b1 a2b2
b2
11-755/18-797
33
Matrix multiplication: another view
b1
A B a1 a 2 .
b2
a11
a
21
.
aM 1
a 2b 2 a 2b 2
. . a1N
a1N
a11
a12
b
.
b
11
NK
.
.
.
. . a2 N
b
b . b ...
. . . b11 . b1K
. bNK
21
2K
. N1
.
.
. .
.
bN 1 . bNK
. . aMN
a
a
a
M1
M2
MN
The outer product of the first column of A and the first row of
B + outer product of the second column of A and the second
row of B + ….
Sum of outer products
3/23/2016
11-755/18-797
34
Why is that useful?
1
.
9
.
0
0
.
. 1
3
.
24
0 0.5 0.75 1 0.75 0.5 0 . . . . .
1 0.9 0.7 0.5 0 0.5 . . . . . .
0.5 0.6 0.7 0.8 0.9 0.95 1 . . . . .
Y
X
• Sounds: Three notes modulated
independently
3/23/2016
11-755/18-797
35
Matrix multiplication: Mixing modulated
spectra
1
.
9
.
0
0
.
. 1
3
.
24
0 0.5 0.75 1 0.75 0.5 0 . . . . .
1 0.9 0.7 0.5 0 0.5 . . . . . .
0.5 0.6 0.7 0.8 0.9 0.95 1 . . . . .
Y
X
• Sounds: Three notes modulated
independently
3/23/2016
11-755/18-797
36
Matrix multiplication: Mixing modulated
spectra
1
.
9
.
0
0
.
. 1
3
.
24
0 0.5 0.75 1 0.75 0.5 0 . . . . .
1 0.9 0.7 0.5 Y0 0.5 . . . . . .
0.5 0.6 0.7 0.8 0.9 0.95 1 . . . . .
X
• Sounds: Three notes modulated
independently
3/23/2016
11-755/18-797
37
Matrix multiplication: Mixing modulated
spectra
1
.
9
.
0
0
.
. 1
3
.
24
0 0.5 0.75 1 0.75 0.5 0 . . . . .
1 0.9 0.7 0.5 0 0.5 . . . . . .
0.5 0.6 0.7 0.8 0.9 0.95 1 . . . . .
X
• Sounds: Three notes modulated
independently
3/23/2016
11-755/18-797
38
Matrix multiplication: Mixing modulated
spectra
1
.
9
.
0
0
.
. 1
3
.
24
0 0.5 0.75 1 0.75 0.5 0 . . . . .
1 0.9 0.7 0.5 0 0.5 . . . . . .
0.5 0.6 0.7 0.8 0.9 0.95 1 . . . . .
X
• Sounds: Three notes modulated
independently
3/23/2016
11-755/18-797
39
Matrix multiplication: Mixing modulated
spectra
• Sounds: Three notes modulated
independently
3/23/2016
11-755/18-797
40
Matrix multiplication: Image
transition
i1
i
2
.
.
.
j1
j2
.
.
.
1 .9 .8 .7 .6 .5 .4 .3 .2 .1 0
0 .1 .2 .3 .4 .5 .6 .7 .8 .9 1
• Image1 fades out linearly
• Image 2 fades in linearly
3/23/2016
11-755/18-797
41
Matrix multiplication: Image
transition
i1
i
2
.
.
.
1 .9 .8 .7 .6 .5 .4
0 .1 .2 .3 .4 .5 .6
i1 0.9i1 0.8i1 . .
i2 0.9i2 0.8i2 . .
.
.
.
. .
.
.
. .
.
i 0.9i 0.8i . .
N
N
N
j1
j2
.
.
.
• Each column is one image
.3
.7
.
.
.
.
.
.2
.8
. .
. .
. .
. .
. .
.1
.9
.
.
.
.
.
0
1
0
0
0
0.
0
– The columns represent a sequence of images of decreasing
intensity
• Image1 fades out linearly
3/23/2016
11-755/18-797
42
Matrix multiplication: Image
transition
i1
i
2
.
.
.
j1
j2
.
.
.
1 .9 .8 .7 .6 .5 .4 .3 .2 .1 0
0 .1 .2 .3 .4 .5 .6 .7 .8 .9 1
• Image 2 fades in linearly
3/23/2016
11-755/18-797
43
Matrix multiplication: Image
transition
i1
i
2
.
.
.
j1
j2
.
.
.
1 .9 .8 .7 .6 .5 .4 .3 .2 .1 0
0 .1 .2 .3 .4 .5 .6 .7 .8 .9 1
• Image1 fades out linearly
• Image 2 fades in linearly
3/23/2016
11-755/18-797
44
The Identity Matrix
1 0
Y
0 1
• An identity matrix is a square matrix where
– All diagonal elements are 1.0
– All off-diagonal elements are 0.0
• Multiplication by an identity matrix does not change vectors
3/23/2016
11-755/18-797
45
Diagonal Matrix
2 0
Y
0 1
• All off-diagonal elements are zero
• Diagonal elements are non-zero
• Scales the axes
– May flip axes
3/23/2016
11-755/18-797
46
Diagonal matrix to transform images
• How?
3/23/2016
11-755/18-797
47
Stretching
2 0 0 1 1 . 2 . 2 2 . 2 . 10
0 1 0 1 2 . 1 . 5 6 . 10 . 10
0 0 1 1 1 . 1 . 0 0 . 1 . 1
• Location-based
representation
• Scaling matrix – only scales
the X axis
– The Y axis and pixel value are
scaled by identity
• Not a good way of scaling.
3/23/2016
11-755/18-797
48
Stretching
D=
1 .5
0 .5
A 0 0
0 0
. .
Newpic
0 0
1 .5
0 .5
0 0
. .
DA
.
.
.
( Nx 2 N )
.
.
N is the width
of the original
image
• Better way
• Interpolate
3/23/2016
11-755/18-797
49
Modifying color
R G
P
1
Newpic P 0
0
B
0
2
0
0
0 1
• Scale only Green
3/23/2016
11-755/18-797
50
Permutation Matrix
0 1 0 x y
0 0 1 y z
1 0 0 z x
(3,4,5)
Z (old X)
5
Y
3
Y (old Z)
Z
4
X
3
5
X (old Y) 4
• A permutation matrix simply rearranges the axes
– The row entries are axis vectors in a different order
– The result is a combination of rotations and reflections
• The permutation matrix effectively permutes the
arrangement of the elements in a vector
3/23/2016
11-755/18-797
51
Permutation Matrix
0 1 0
P 1 0 0
0 0 1
0 1 0
P 0 0 1
1 0 0
1 1 . 2 . 2 2 . 2 . 10
1 2 . 1 . 5 6 . 10 . 10
1 1 . 1 . 0 0 . 1 . 1
• Reflections and 90 degree rotations of images
and objects
3/23/2016
11-755/18-797
52
Permutation Matrix
0 1 0
P 1 0 0
0 0 1
0 1 0
P 0 0 1
1 0 0
x1
y
1
z1
x2
y2
z2
. . xN
. . y N
. . z N
• Reflections and 90 degree rotations of images and objects
– Object represented as a matrix of 3-Dimensional “position” vectors
– Positions identify each point on the surface
3/23/2016
11-755/18-797
53
Rotation Matrix
x' x cos q y sin q
y ' x sin q y cos q
(x,y)
Y
cos q
Rq
sin q
sin q
cos q
x
X
y
x'
X new
y '
Rq X X new
(x’,y’)
y’
y
(x,y)
q
Y
X
X
x’ x
• A rotation matrix rotates the vector by some angle q
• Alternately viewed, it rotates the axes
– The new axes are at an angle q to the old one
3/23/2016
11-755/18-797
54
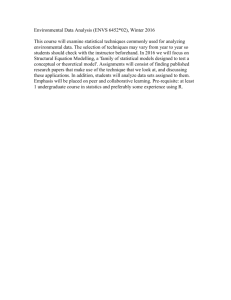
Rotating a picture
cos 45 sin 45 0
R sin 45 cos 45 0
0
0
1
0
2
1
1 1 . 2 . 2 2 . 2 . .
1 2 . 1 . 5 6 . 10 . .
1 1 . 1 . 0 0 . 1 . 1
2
3 2
1
.
2
. 3 2
.
1
. 3 2
. 7 2
.
0
4 2
8 2
0
. 8 2
. 12 2
.
1
• Note the representation: 3-row matrix
– Rotation only applies on the “coordinate” rows
– The value does not change
– Why is pacman grainy?
3/23/2016
11-755/18-797
55
. .
. .
. 1
3-D Rotation
Xnew
Ynew
Z
Y
Znew
a
q
X
• 2 degrees of freedom
– 2 separate angles
• What will the rotation matrix be?
3/23/2016
11-755/18-797
56
Orthogonal/Orthonormal vectors
x
A y
z
A.B 0
u
B v
w
xu yv zw 0
•
Two vectors are orthogonal if they are perpendicular to one another
– A.B = 0
– A vector that is perpendicular to a plane is orthogonal to every vector on the
plane
•
Two vectors are orthonormal if
– They are orthogonal
– The length of each vector is 1.0
– Orthogonal vectors can be made orthonormal by normalizing their lengths to 1.0
3/23/2016
11-755/18-797
57
Orthogonal matrices
All 3 at 90o to
on another
0.5
0.5
0
0.125
0.125
0.75
0.375
0.375
0.5
• Orthogonal Matrix : AAT = ATA = I
– The matrix is square
– All row vectors are orthonormal to one another
• Every vector is perpendicular to the hyperplane formed by all other vectors
– All column vectors are also orthonormal to one another
– Observation: In an orthogonal matrix if the length of the row vectors
is 1.0, the length of the column vectors is also 1.0
– Observation: In an orthogonal matrix no more than one row can
have all entries with the same polarity (+ve or –ve)
3/23/2016
11-755/18-797
58
Orthogonal and Orthonormal Matrices
Ax
q
• Orthogonal matrices will retain the length and relative
angles between transformed vectors
– Essentially, they are combinations of rotations, reflections and
permutations
– Rotation matrices and permutation matrices are all orthonormal
3/23/2016
11-755/18-797
59
Orthogonal and Orthonormal Matrices
1
0.5
0
0.0675
0.125
0.75
0.1875
0.375
0.5
• If the vectors in the matrix are not unit length, it cannot
be orthogonal
– AAT != I, ATA != I
– AAT = Diagonal or ATA = Diagonal, but not both
– If all the entries are the same length, we can get AAT = ATA = Diagonal, though
• A non-square matrix cannot be orthogonal
– AAT=I or ATA = I, but not both
3/23/2016
11-755/18-797
60
Matrix Operations: Properties
• A+B = B+A
• AB != BA
3/23/2016
11-755/18-797
61
Matrix Inversion
• A matrix transforms an
N-dimensional object to a
different N-dimensional
object
• What transforms the new
object back to the original?
– The inverse transformation
0.8
T 1.0
0.7
0
0.8
0.9
0.7
0.8
0.7
? ? ?
Q ? ? ? T 1
? ? ?
• The inverse transformation is
called the matrix inverse
3/23/2016
11-755/18-797
62
Matrix Inversion
T-1
T
T 1TD D T 1T I
• The product of a matrix and its inverse is the
identity matrix
– Transforming an object, and then inverse
transforming it gives us back the original object
TT 1D D TT 1 I
3/23/2016
11-755/18-797
63
Matrix inversion (division)
• The inverse of matrix multiplication
– Not element-wise division!!
• Provides a way to “undo” a linear transformation
– Inverse of the unit matrix is itself
– Inverse of a diagonal is diagonal
– Inverse of a rotation is a (counter)rotation (its transpose!)
3/23/2016
11-755/18-797
64
Projections
• What would we see if the cone to the left were transparent if we
looked at it from above the plane shown by the grid?
– Normal to the plane
– Answer: the figure to the right
• How do we get this? Projection
3/23/2016
11-755/18-797
65
Projection Matrix
90degrees
W2
W1
projection
• Consider any plane specified by a set of vectors W1, W2..
– Or matrix [W1 W2 ..]
– Any vector can be projected onto this plane
– The matrix A that rotates and scales the vector so that it becomes its
projection is a projection matrix
3/23/2016
11-755/18-797
66
Projection Matrix
90degrees
W2
W1
projection
• Given a set of vectors W1, W2, which form a matrix W = [W1 W2.. ]
• The projection matrix to transform a vector X to its projection on the plane is
– P = W (WTW)-1 WT
• We will visit matrix inversion shortly
• Magic – any set of vectors from the same plane that are expressed as a matrix
will give you the same projection matrix
– P = V (VTV)-1 VT
3/23/2016
11-755/18-797
67
Projections
• HOW?
3/23/2016
11-755/18-797
68
Projections
•
Draw any two vectors W1 and W2 that lie on the plane
– ANY two so long as they have different angles
•
•
•
•
Compose a matrix W = [W1 W2]
Compose the projection matrix P = W (WTW)-1 WT
Multiply every point on the cone by P to get its projection
View it
– I’m missing a step here – what is it?
3/23/2016
11-755/18-797
69
Projections
• The projection actually projects it onto the plane, but you’re still seeing
the plane in 3D
– The result of the projection is a 3-D vector
– P = W (WTW)-1 WT = 3x3, P*Vector = 3x1
– The image must be rotated till the plane is in the plane of the paper
• The Z axis in this case will always be zero and can be ignored
• How will you rotate it? (remember you know W1 and W2)
3/23/2016
11-755/18-797
70
Projection matrix properties
•
The projection of any vector that is already on the plane is the vector itself
– Px = x if x is on the plane
– If the object is already on the plane, there is no further projection to be performed
•
The projection of a projection is the projection
– P (Px) = Px
– That is because Px is already on the plane
•
Projection matrices are idempotent
– P2 = P
3/23/2016
• Follows from the above
11-755/18-797
71
Projections: A more physical meaning
• Let W1, W2 .. Wk be “bases”
• We want to explain our data in terms of these “bases”
– We often cannot do so
– But we can explain a significant portion of it
• The portion of the data that can be expressed in terms of
our vectors W1, W2, .. Wk, is the projection of the data
on the W1 .. Wk (hyper) plane
– In our previous example, the “data” were all the points on a
cone, and the bases were vectors on the plane
3/23/2016
11-755/18-797
72
Projection : an example with sounds
• The spectrogram (matrix) of a piece of music
How much of the above music was composed of the
above notes
I.e. how much can it be explained by the notes
3/23/2016
11-755/18-797
73
Projection: one note
M=
• The spectrogram (matrix) of a piece of music
W=
M = spectrogram; W = note
P = W (WTW)-1 WT
Projected Spectrogram = P * M
3/23/2016
11-755/18-797
74
Projection: one note – cleaned up
M=
• The spectrogram (matrix) of a piece of music
W=
Floored all matrix values below a threshold to zero
3/23/2016
11-755/18-797
75
Projection: multiple notes
M=
• The spectrogram (matrix) of a piece of music
W=
P = W (WTW)-1 WT
Projected Spectrogram = P * M
3/23/2016
11-755/18-797
76
Projection: multiple notes, cleaned up
M=
• The spectrogram (matrix) of a piece of music
W=
P = W (WTW)-1 WT
Projected Spectrogram = P * M
3/23/2016
11-755/18-797
77
Projection and Least Squares
• Projection actually computes a least squared error estimate
• For each vector V in the music spectrogram matrix
– Approximation: Vapprox = a*note1 + b*note2 + c*note3..
a
b
c
note1
note2
note3
Vapprox
– Error vector E = V – Vapprox
– Squared error energy for V e(V) = norm(E)2
– Total error = sum over all V { e(V) } = SV e(V)
• Projection computes Vapprox for all vectors such that Total error
is minimized
– It does not give you “a”, “b”, “c”.. Though
• That needs a different operation – the inverse / pseudo inverse
3/23/2016
11-755/18-797
78
Perspective
• The picture is the equivalent of “painting” the viewed scenery on a
glass window
• Feature: The lines connecting any point in the scenery and its
projection on the window merge at a common point
– The eye
– As a result, parallel lines in the scene apparently merge to a point
3/23/2016
11-755/18-797
79
An aside on Perspective..
• Perspective is the result of convergence of the image to a point
• Convergence can be to multiple points
– Top Left: One-point perspective
– Top Right: Two-point perspective
– Right: Three-point perspective
3/23/2016
11-755/18-797
80
Representing Perspective
• Perspective was not always understood.
• Carefully represented perspective can create
illusions..
3/23/2016
11-755/18-797
81
Central Projection
x’,y’,z’
Y
x,y
z
z
z'
x ax '
y ay'
a
X
x y z
Property of a line through origin
x ' y' z '
• The positions on the “window” are scaled along the line
• To compute (x,y) position on the window, we need z (distance of
window from eye), and (x’,y’,z’) (location being projected)
3/23/2016
11-755/18-797
82
Homogeneous Coordinates
ax a ' x'
x’,y’
Y
ay a ' y '
a
x x'
a'
x,y
X
• Represent points by a triplet
–
–
–
–
Using yellow window as reference:
(x,y) = (x,y,1)
(x’,y’) = (x,y,c’) c’ = a’/a
Locations on line generally represented as (x,y,c)
a
x x'
a'
a
y y'
a'
• x’= x/c’ , y’= y/c’
3/23/2016
11-755/18-797
83
Homogeneous Coordinates in 3-D
x1’,y1’,z1’
x1,y1,z1
x2,y2,z2
x2’,y2’,z2’
ax1 a ' x1 '
ax 2 a ' x 2 '
ay1 a ' y1 '
ay2 a ' y2 '
az1 a ' z1 '
az2 a ' z2 '
• Points are represented using FOUR coordinates
– (X,Y,Z,c)
– “c” is the “scaling” factor that represents the distance of the actual
scene
• Actual Cartesian coordinates:
– Xactual = X/c, Yactual = Y/c, Zactual = Z/c
3/23/2016
11-755/18-797
84
Homogeneous Coordinates
• In both cases, constant “c” represents distance along the line
with respect to a reference window
– In 2D the plane in which all points have values (x,y,1)
• Changing the reference plane changes the representation
• I.e. there may be multiple Homogenous representations
(x,y,c) that represent the same cartesian point (x’ y’)
3/23/2016
11-755/18-797
85
Matrix Rank and Rank-Deficient Matrices
P * Cone =
• Some matrices will eliminate one or more dimensions during
transformation
– These are rank deficient matrices
– The rank of the matrix is the dimensionality of the transformed
version of a full-dimensional object
3/23/2016
11-755/18-797
86
Matrix Rank and Rank-Deficient Matrices
Rank = 2
Rank = 1
• Some matrices will eliminate one or more dimensions during
transformation
– These are rank deficient matrices
– The rank of the matrix is the dimensionality of the transformed
version of a full-dimensional object
3/23/2016
11-755/18-797
87
Non-square Matrices
x1
y
1
x2 . . xN
y2 . . y N
X = 2D data
.8 .9
.1 .9
.6 0
xˆ1
yˆ1
zˆ
1
P = transform
xˆ2 . . xˆ N
yˆ 2 . . yˆ N
zˆ2 . . zˆ N
PX = 3D, rank 2
• Non-square matrices add or subtract axes
– More rows than columns add axes
• But does not increase the dimensionality of the dataaxes
• May reduce dimensionality of the data
3/23/2016
11-755/18-797
88
Non-square Matrices
x1
y
1
z1
x2
y2
z2
. . xN
. . y N
. . z N
X = 3D data, rank 3
.3 1 .2
.5 1 1
xˆ1
yˆ1
P = transform
xˆ2 . . xˆ N
yˆ 2 . . yˆ N
PX = 2D, rank 2
• Non-square matrices add or subtract axes
– More rows than columns add axes
• But does not increase the dimensionality of the data
– Fewer rows than columns reduce axes
• May reduce dimensionality of the data
3/23/2016
11-755/18-797
89
The Rank of a Matrix
.8 .9
.1 .9
.6 0
.3 1 .2
.5 1 1
• The matrix rank is the dimensionality of the transformation of a fulldimensioned object in the original space
• The matrix can never increase dimensions
– Cannot convert a circle to a sphere or a line to a circle
• The rank of a matrix can never be greater than the lower of its two
dimensions
3/23/2016
11-755/18-797
90
Are Projections Full-Rank?
M=
W=
P = W (WTW)-1 WT ; Projected Spectrogram = P*M
The original spectrogram can never be recovered
P is rank deficient
P explains all vectors in the new spectrogram as a mixture of
only the 4 vectors in W
There are only a maximum of 4 linearly independent bases
Rank of P is 4
3/23/2016
11-755/18-797
91
The Rank of Matrix
M=
Projected Spectrogram = P * M
Every vector in it is a combination of only 4 bases
The rank of the matrix is the smallest no. of bases required to
describe the output
E.g. if note no. 4 in P could be expressed as a combination of notes 1,2
and 3, it provides no additional information
Eliminating note no. 4 would give us the same projection
The rank of P would be 3!
3/23/2016
11-755/18-797
92
Matrix rank is unchanged by transposition
0.9 0.5 0.8
0.1 0.4 0.9
0.42 0.44 0.86
0.9 0.1 0.42
0.5 0.4 0.44
0.8 0.9 0.86
• If an N-dimensional object is compressed to a
K-dimensional object by a matrix, it will also
be compressed to a K-dimensional object by
the transpose of the matrix
3/23/2016
11-755/18-797
93
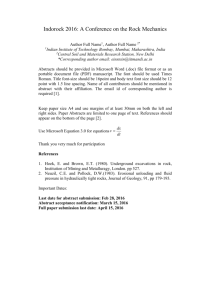
Inverting rank-deficient matrices
0
0
1
0
.25
0.433
0 0.433 0.75
• Rank deficient matrices “flatten” objects
– In the process, multiple points in the original object get mapped to the same
point in the transformed object
• It is not possible to go “back” from the flattened object to the original
object
– Because of the many-to-one forward mapping
• Rank deficient matrices have no inverse
3/23/2016
11-755/18-797
94
Rank Deficient Matrices
M=
The projection matrix is rank deficient
You cannot recover the original spectrogram from the
projected one..
Rank deficient matrices have no inverse
3/23/2016
11-755/18-797
95
Matrix Determinant
(r1+r2)
(r2)
(r1)
(r2)
(r1)
• The determinant is the “volume” of a matrix
• Actually the volume of a parallelepiped formed from its
row vectors
– Also the volume of the parallelepiped formed from its column
vectors
• Standard formula for determinant: in text book
3/23/2016
11-755/18-797
96
Matrix Determinant: Another Perspective
Volume = V1
Volume = V2
0.8
1.0
0.7
0
0.8
0.9
0.7
0.8
0.7
• The determinant is the ratio of N-volumes
– If V1 is the volume of an N-dimensional sphere “O” in N-dimensional
space
• O is the complete set of points or vertices that specify the object
– If V2 is the volume of the N-dimensional ellipsoid specified by A*O,
where A is a matrix that transforms the space
– |A| = V2 / V1
3/23/2016
11-755/18-797
97
Matrix Determinants
• Matrix determinants are only defined for square matrices
– They characterize volumes in linearly transformed space of the same
dimensionality as the vectors
• Rank deficient matrices have determinant 0
– Since they compress full-volumed N-dimensional objects into zerovolume N-dimensional objects
• E.g. a 3-D sphere into a 2-D ellipse: The ellipse has 0 volume (although it
does have area)
• Conversely, all matrices of determinant 0 are rank deficient
– Since they compress full-volumed N-dimensional objects into
zero-volume objects
3/23/2016
11-755/18-797
98
Multiplication properties
• Properties of vector/matrix products
– Associative
A (B C) (A B) C
– Distributive
A (B C) A B A C
– NOT commutative!!!
A B BA
• left multiplications ≠ right multiplications
– Transposition
3/23/2016
A B
T
BT AT
11-755/18-797
99
Determinant properties
• Associative for square matrices
ABC A B C
– Scaling volume sequentially by several matrices is equal to scaling
once by the product of the matrices
• Volume of sum != sum of Volumes
(B C) B C
• Commutative
– The order in which you scale the volume of an object is irrelevant
AB B A A B
3/23/2016
11-755/18-797
100
Revisiting Projections and Least Squares
• Projection computes a least squared error estimate
• For each vector V in the music spectrogram matrix
– Approximation: Vapprox = a*note1 + b*note2 + c*note3..
a
Vapprox T b
c
note1
note2
note3
T
– Error vector E = V – Vapprox
– Squared error energy for V
e(V) = norm(E)2
• Projection computes Vapprox for all vectors such that Total error is
minimized
• But WHAT ARE “a” “b” and “c”?
3/23/2016
11-755/18-797
101
The Pseudo Inverse (PINV)
a
Vapprox T b
c
a
V T b
c
• We are approximating spectral vectors V as the
transformation of the vector [a b c]T
– Note – we’re viewing the collection of bases in T as a
transformation
• The solution is obtained using the pseudo inverse
– This give us a LEAST SQUARES solution
• If T were square and invertible Pinv(T) = T-1, and V=Vapprox
3/23/2016
11-755/18-797
102
Explaining music with one note
M=
X =PINV(W)*M
W=
Recap: P = W (WTW)-1 WT, Projected Spectrogram = P*M
Approximation: M = W*X
The amount of W in each vector = X = PINV(W)*M
W*Pinv(W)*M = Projected Spectrogram
W*Pinv(W) = Projection matrix!!
3/23/2016
11-755/18-797
PINV(W) = (WTW)-1WT
103
Explanation with multiple notes
M=
X=PINV(W)M
W=
X = Pinv(W) * M; Projected matrix = W*X = W*Pinv(W)*M
3/23/2016
11-755/18-797
104
How about the other way?
M=
V=
W=
?
U=
?
W = M Pinv(V)
3/23/2016
U = WV
11-755/18-797
105
Pseudo-inverse (PINV)
• Pinv() applies to non-square matrices
• Pinv ( Pinv (A))) = A
• A*Pinv(A)= projection matrix!
– Projection onto the columns of A
• If A = K x N matrix and K > N, A projects N-D vectors
into a higher-dimensional K-D space
– Pinv(A) = NxK matrix
– Pinv(A)*A = I in this case
• Otherwise A * Pinv(A) = I
3/23/2016
11-755/18-797
106
Matrix inversion (division)
• The inverse of matrix multiplication
– Not element-wise division!!
• Provides a way to “undo” a linear transformation
–
–
–
–
Inverse of the unit matrix is itself
Inverse of a diagonal is diagonal
Inverse of a rotation is a (counter)rotation (its transpose!)
Inverse of a rank deficient matrix does not exist!
• But pseudoinverse exists
• For square matrices: Pay attention to multiplication side!
1
1
A B C, A C B , B A C
• If matrix is not square use a matrix pseudoinverse:
3/23/2016
A B C, A C B , B A C
11-755/18-797
107