Two stage Economic Dispatches is a practical approach used to
advertisement

DECLARATION OF ORIGINALITY
NAME OF STUDENT: BANA AMMON CLIFFORD
REGISTRATION NUMBER: F17/2086/2010
COLLEGE: Architecture and Engineering
FACULTY/SCHOOL/INSTITUTE: Engineering
DEPARTMENT: Electrical and Information Engineering
COURSE NAME: Bachelor of Science in Electrical and Electronic Engineering
TITLE OF WORK: TWO STAGE ECONOMIC DISPATCH USING DIFFERENTIAL
EVOLUTION METHOD
1. I understand what plagiarism is and I am aware of the university policy in this regard.
2. I declare that this final year project report is my original work and has not been
submitted elsewhere for examination, award of a degree or publication. Where other
people’s work or my own work has been used, this has properly been acknowledged
and referenced in accordance with the University of Nairobi’s requirements.
3. I have not sought or used the services of any professional agencies to produce this work
4. I have not allowed, and shall not allow anyone to copy my work with the
intention of passing it off as his/her own work.
5. I understand that any false claim in respect of this work shall result in disciplinary
action, in accordance with University Anti-plagiarism policy.
Signature
…………………………………………………………………………………………………
Date
…………………………………………………………………………………………………
i
CERTIFICATION
This project has been submitted to the Department of Electrical and Information Engineering
at the University of Nairobi with my approval as writer;
Prof. Nicodemus Abungu Odero
Date: ……………………………………………..
ii
DEDICATION
To my family, especially my dad and mom for always believing in me.
iii
ACKNOWLEDGEMENTS
First of all, I would like to thank the Almighty Father above for being with me throughout the
five years of my campus life.
I would like to express my sincere gratitude to all those who helped this project come to
fruition. However, it would not have been possible without the kind support and help of many
individuals and organizations. I would like to extend my sincere thanks to all of them.
I would like to thank my supervisor, Prof. Nicodemus A. Odero for his unending motivation
and continuous correction tendencies that enabled me do take this project to the top most level
that I could.
I am highly indebted to Mr. Peter Musau for his guidance and constant supervision as well as
for providing necessary information regarding the project and also for his support in completing
the project.
I would like to express my special gratitude to my classmates, Billy Ochieng, Joseph Kimathi,
Kennedy Wanjahi, Elijah Kimani and Kiplimo for their help in understanding the project.
Finally I would like to thank my family for always being there for me. You guys are the best.
iv
Table of Contents
DECLARATION OF ORIGINALITY ................................................................................... i
CERTIFICATION ...................................................................................................................ii
DEDICATION........................................................................................................................ iii
ACKNOWLEDGEMENTS ................................................................................................... iv
LIST OF FIGURES ...............................................................................................................vii
LIST OF TABLES ............................................................................................................... viii
LIST OF ABBREVIATION................................................................................................... ix
ABSTRACT .............................................................................................................................. x
CHAPTER 1 ............................................................................................................................. 1
Introduction ............................................................................................................................ 1
1.1 Two Stage Economic Dispatch..................................................................................... 1
1.1.1 Economic Dispatch ................................................................................................ 1
1.1.2 Two- Stage Economic Dispatch............................................................................. 1
1.1.3 Differential Evolution Method ............................................................................... 1
1.2 Optimization Methods .................................................................................................. 2
1.2.1 Conventional Optimization Method ...................................................................... 2
1.2.2 Intelligence Search Methods .................................................................................. 3
1.2.3 Application of Fuzzy Set Theory ........................................................................... 8
1.3 Summary....................................................................................................................... 9
1.4 Problem Statement ........................................................................................................ 9
1.4.1 Project Objectives .................................................................................................. 9
1.5 Project Organization ................................................................................................... 10
CHAPTER 2 ........................................................................................................................... 11
Literature Review ................................................................................................................. 11
2.1 Literature Review on Two-Stage Economic Dispatch ............................................... 11
2.1.1 What is Two Stage Economic Dispatch? ............................................................. 11
v
2.2 Literature Review on Differential Evolution (DE) ..................................................... 19
CHAPTER 3 ........................................................................................................................... 25
3.1 Formulation of Two Stage Economic Dispatch for DE Solution ............................... 25
3.1.1 First Stage (Classical Economical Dispatch) ....................................................... 25
3.1.2 Second Stage ........................................................................................................ 25
3.2 DE Algorithm for Two - Stage Economic Dispatch................................................... 27
3.3 DE Flowchart for Two - Stage Economic Dispatch ................................................... 29
CHAPTER 4 ........................................................................................................................... 30
Results .................................................................................................................................. 30
4.1 Case 1: 14 Bus System (5 Unit System) ..................................................................... 30
4.2 Case 2: 30 Bus System (6 Unit System) ..................................................................... 32
Analysis and Discussion ................................................................................................... 34
CHAPTER 5 ........................................................................................................................... 38
Conclusions and Recommendations..................................................................................... 38
5.1 Conclusions ................................................................................................................ 38
5.2 Recommendation ........................................................................................................ 38
REFERENCES ....................................................................................................................... 39
APPENDIX ............................................................................................................................. 41
vi
LIST OF FIGURES
Figure 2. 1 Input-Output Characteristic of a Generating Unit ................................................. 13
Figure 3. 1 DE Flowchart for Two-Stage Economic Dispatch ................................................ 29
Figure 4. 1Single Line Diagram for the IEEE 14 – Bus System [20] ...................................... 30
Figure 4. 2 Single Line Diagram for the IEEE 30 – Bus System [20] ..................................... 32
Figure 4. 3 14-Bus Variation of Fuel Cost With Power Demand for First and Second Stage
ED ............................................................................................................................................ 34
Figure 4. 4 30-Bus Variation of Fuel Cost With Power Demand for First and Second Stage
ED ............................................................................................................................................ 34
Figure 4. 5 14 Bus Real Power Loss Variation with Power Demand ...................................... 35
Figure 4. 6 30 Bus Real Power Loss Variation with Power Demand ...................................... 35
vii
LIST OF TABLES
Table 2. 1 Explanation of Differential Evolution Terms ......................................................... 23
Table 4. 1 Differential Evolution Parameters .......................................................................... 30
Table 4. 2 Optimal Generation for 1st and 2nd Stage using DE, Demand = 147.10MW ....... 31
Table 4. 3 Optimal Generation for 1st and 2nd Stage using DE, Demand = 259.00 MW ...... 31
Table 4. 4 Optimal Generation for 1st and 2nd Stage using DE, Demand = 189.20 MW ...... 33
Table 4. 5 Optimal Generation for 1st and 2nd Stage using DE, Demand = 308.30 MW ...... 33
viii
LIST OF ABBREVIATION
ACO
Ant Colony Optimization
DE
Differential Evolution
ED
Economic Dispatch
GA
Genetic Algorithm
IEEE
Institute of Electrical and Electronic Engineering
LP
Linear Programming
MW
Mega-Watts
PSO
Particle Swarm optimization
QP
Quadratic Programming
SA
Simulated Annealing
TS
Tabu Search
IP
Interior Point
EA
Evolutionary Algorithm
AHP
Analytic Hierarchical Process
NLP
Non-Linear Programming
ES
Evolutionary Strategies
MATLAB
Matrix Laboratory
ix
ABSTRACT
Economic Dispatch (ED) is the process of allocating the required load demand between the
available generation units such that the cost of operation is minimized. Two Stage Economic
dispatch consists of two implementation stages; the first stage involving classic economic
power dispatch without considering network loss, where the initial generation plans of the
generator units are determined according to the rank of fuel consuming characteristic of the
units or the principal of equal incremental rate. The second stage involves economic dispatch
considering network loss and security constraints, where two objectives are proposed for the
second stage; cost and loss minimization. There have been many algorithms proposed for
economic dispatch out of which Differential Evolution is discussed in this paper. Differential
Evolution (DE) is a simple and efficient evolutionary algorithm for function optimization over
continuous space. The algorithm tries to locate the global optimum solution for the two stage
ED problem by iterated refining of the population through reproduction and selection. In this
paper, Differential Evolution (DE) technique is presented to solve the two stage economic
dispatch problem, which is a non-linear function of generated power as illustrated in fig 2.1.
The algorithm is analysed and demonstrated on standard IEEE 14 and 30 bus system consisting
of five and six generating units respectively. The minimized cost and loss reduction in the
second stage, as compared to the first stage, is illustrated in the analysis. Test results give the
first and second stage costs to be $257.5012 and 256.4836 for a demand of 147.10 MW and
$434.7735 and $428.5465 respectively for a demand of 259.00 for the 14 Bus case. The rest of
the results (including for the 30 Bus case) are contained in tables 4.2, 4.3, 4.4 and 4.5. These
results show that the two stage dispatch method can not only reduce the system fuel
consumption, but also the system losses.
x
CHAPTER 1
Introduction
1.1 Two Stage Economic Dispatch
1.1.1 Economic Dispatch
Economic Dispatch is the operation of generation facilities in order to produce energy at the
lowest cost possible while considering operational limitations of the generating facilities [1].
1.1.2 Two- Stage Economic Dispatch
Two stage Economic Dispatches is a practical approach used to implement economic power
operation situation of power system. This method consists of two stages. The first stage
involves the classic economic power dispatch without considering network loss, where the
generation plans of the generator units are determined according to the rank of fuel consuming
characteristics of the units or the principal of equal incremental rate. The second stage involves
economic dispatch with consideration of system power loss and network security constraints
[2,3].
1.1.2.1 Classical Economic Dispatch
Classical Economic Dispatch is the determination of the power output of each generating unit
under the constraint condition of the system load demands so as to minimize the operating costs
of the power system. Line security constraints are usually in most cases ignored. The
fundamentals of the economic dispatch problem [2].
1.1.3 Differential Evolution Method
Differential Evolution (DE) is an efficient and powerful population based stochastic search
technique for solving optimization problems over continuous space. The success of DE in
solving a specific problem crucially depends on appropriately choosing trial vector generation
and strategies and their associated control parameter values. Differential Evolution is capable
of handling nonlinear, multimodal objective and non-differentiable functions. A fixed number
of vectors are defined randomly for a population of potential solutions within a nondimensional search space, which are then evolved, over-time to explore the search space and
1
hence is identity specifically the minima of the objective function. Since DE is an evolutionary
computation technique and an optimization algorithm that utilizes the differential information
to guide its further search, it is known to effectively solve large scale optimization problem that
have been widely applied in power system [4].
1.2 Optimization Methods
Optimization is a technology of achieving the most suitable or acceptable solution to a
perceived problem with the aim of making it better than it previously was.
Optimization methods in economic dispatch are categorized broadly into 3 groups, which
include both the traditional and modern optimization methods.
1. Conventional Optimization methods: - These include non-linear programming (NLP),
Quadratic programming (QP), Linear Programming (LP), Newton-Raphson Method, Interior
Point (IP) methods [2].
2. Intelligence Search Methods which includes:- Tabu Search (TS), Particle Swam
Optimization (PSO), Evolutionary Algorithms (EAs), e.g. – Analytic Hierarchical Process
(AHP), Fuzzy Set Applications etc. [2].
1.2.1 Conventional Optimization Method
1.2.1.1 Linear Programming
Linear programming (LP) based technique is used to linearism the non-linear power system
optimization problem, so that objective function and constraints of power system optimization
have linear form [2]. Advantages include reliability, guide identification of feasibility and
accommodation of a wide variety of power systems operating limits. Demerits include less
accurate when dealing with a non-linear power system model.
1.2.1.2 Newton-Raphson Method
This is an iterative method which approximates the set of non-linear simultaneous equations to
a set of linear equations using Taylor’s series expansion and the terms are restricted first order
2
approximation because of quadratic convergence, this method is less prone to divergence with
ill conditional problems [5].
1.2.1.3 Quadratic Programming
Is a special form of nonlinear programming? The objective function of QP optimization model
is quadratic and the constraints are in linear form, quadratic programming has higher accuracy
than linear programming approaches [2].
1.2.2 Intelligence Search Methods
1.2.2.1 Tabu Search (TS)
Tabu search is a meta-heuristic that guides a local heuristic search procedure to explore the
solution spaces beyond local optimality. It makes use of adaptive behavior/memory, creating a
much flexible social behaviors. These memory based strategies used in Tabu search form a
fundamental part of the implementation strategy, founded on agues for intergrading principles
hence creates effective strategies for exploiting the same. The basic form of TS was built on
earlier work by Fred Glover [6].
TS is able to eliminate local minimal and to search areas beyond a local minimum and is used
is solve simplified OPF problems such as unit commitment and reactive problem [2].
Tabu search Algorithm function with four major step: - Initialization, mutation, recombination,
eradiation and selection. The various steps of the solving the economic dispatch problem are
deserted as below:
Initialization of Parent Population
Consider the ith parent, Ii = [PG1, PG2……….PGNG] (committed generating units are NG) of the
population size, NP.
Components of Ii are generated as;
PGj - µ(PGimin, PGimax), J = 1, 2, …………., NG
(1.1)
3
where;
µ(PGimin, PGimax) denotes a uniform random variable ranging over [PGimin, PGimax]
The remaining parents are generated in the same way.
Fitness function of each percent of the initial population is computed using;
lim
𝑁𝐿𝐾
Rlim
Fi = FTi + k1PGilim + k2∑𝑁𝐿𝐾
+ ks ∑𝑁𝑂
𝑅=1 ∑𝑡=1 IPk
𝑘=1 𝑃
(1.2)
Where;
k1, k2, k2= penalty factors for constraint violation
N0= number of single-line outages
FTi- Total fuel cost for the ith parent
NLL – Number of limiting lines
PGj – power output of j-th generator
FT – Total fuel cost
IPk – MVA line flow of k-th line
Mutation
An offspring population denoted by I; can be formulated from the initial, formulated parent I
as
Ii = [PG1,……..PGNG] ii= NP + 1, NP + 2,………..NP + NM
(1.3)
Where:
PGj = PGj + N (0,0j2); j = 1, 2,…………..NG
(1.3.1)
Subject to
PGj =
PGjmin if PGj < PGjmin ;
j = 1, 2,……….NG
PGjmax if PGjmax ;
j = 1, 2,……….NG
(1.3.2)
4
Where Nm is the number of mutated individuals randomly selected, N (0, 0j2) represents normal
random variable with mean zero and standard deviation 0j.
Recombination
This mechanism aims to generate a new offspring by using a combination of two parent
individuals Ii1 and Ii2 selected randomly. The offspring therefore inherits characteristics from
the parents. The recombination function is given as:Ii = Ii + µ(0, µ, (Ii,)I = NP + Nm + 1, NP+ NM + 2 , ………2NP = [PGi ……., PGj,………PGNG];
j = 1, 2, …………, NG
(1.3.4)
Nm and Nr were both initialized to ½ Np, Nm and Nr must satisfy the following condition
NM _ Nr = NP
Nm, min ≤ Nm ≤ Nm, max
Nr, min ≤ Nr ≤ Nr, max
(1.3.5)
Evaluation and selection
The calculated fitness as assigned the rank, RC to individuals of the combined population with
parent and offspring population forming 2NP individuals.
The highest rank then becomes RC; = 1. To present an individual from being trapped at a local
minima, the concept of distance is added to the weight value of each individual. This answer
that survived of each individual is decided by its weight. Formula for calculating the weight
is;WI = RC; T α RD; I = 1, 2, ………, 2NP
(1.3.6)
Where:
RDi – is the rank of Di assigned to the ith individual
Di – sum of distances from the individual to each solution in the tabu list i.
Di = ∑𝑇𝐿𝑆
𝑡−1 |Ii - Itabu, t|
TLS - Tabu list size [20].
5
1.2.2.2 Particle Swarm Optimization (PSO)
Particle Swarm Optimization belongs to the field of swarm intelligence and collective
intelligence and is a sub-field of computational intelligence. PSO is related to other swam
intelligence Algorithms such as Ant colony optimization (ACO).
PSO was described as a stochastic global optimization method for continuous function in 1995
by Eberhart and Kennedy [7,8].
The inspiration behind PSO is the social foraging behavior of some animal such as flocking
behavior of birds and the schooling behavior of fish. Particle in the swarm fly through an
environment following the fitter members of historically good areas of the environment [7].
The goal of the algorithm is to have all the particles locate the optima in a multi-dimensional
hyper-volume. This is achieved by assigning initially random position to all particles in the
space and small initial random realities. The algorithm is then executed like a simulation
advancing the position of each particle in turn base on its velocity, the best known global
position in the problem space and the best known to the particle PSO has the problem of
dependency on initial point and parameters and the finding their optimal design parameters and
the stochastic characteristics of the final outputs. The main advantage are, easy implementation,
cheaper in comparison to other methods, simple concept and robustness [2,9].
PSO consists of a population refining its knowledge of the given search space. PSO is inspired
by particles moving around in the search space. The individuals in a PSO thus have their own
position and velocities. These individuals are denoted as particles. Traditionally PSO has no
cross-over between individuals and has no mutation. Each particle remember, its own left
position found so far in the explanation. This position called personnel best and is denoted by
Pbit, Additionally, among there Ptbi there’s only are particle that has the best fitness, called the
global best, which is denoted by Ptgbi. The velocity and position update equations of PSO are:Vit = wVit-1 + C1 X V1 X (Pbit-1 – Xt+1) + C2 x V2 x (Psbit-1 – Xit-1)
Xit = Xit-1 + Vit
i= 1,…………Np
(1.4)
(1.5)
Where;
W= the inertia weight
C1, C2 – Acceleration coefficients
ND- The dimension of the optimization problem (No. of decision variables)
6
V1, V2- Two separately generated uniformly distributed random numbers between 0 and 1.
X- Position of the particle
Vi- The velocity of the in dimensions
Implementation
The mathematical model of the Unit Commitment (UC) problem can be expressed as:Min f(x)
(1.5.6)
h; (x) = 0
j= 1, ……….., m
j; (x) ≥ 0
i = 1, …….…, k
To handle the infeasible solution, the cost function is used to evaluate a feasible solution, that
is
Фx (x) = f (x)
The constraint violation measure Фµ(x) for the r + m constraints are usually defined as
Фµ(x) = ∑𝑟𝑖=1 𝑔i(x) + ∑𝑟𝑖=1 │hj +(x) │
(1.6)
Or
2
Фµ(x) = ½[ ∑𝑟𝑖=1(𝑔i(x)2 + ∑𝑚
𝑖=1(h; +(x)) ]
Where s;+(x); The magnitude of the violation of the ith inequality constraint.
hj+(x) : The magnitude of the violation of the jth equality constraint
r: The number of inequality constraints
m: The number of equality constraints
The total evaluation of an individual x, which can be interpreted as the error (for a
minimization) problem of an individual x, as obtained as;
Ф(x) = Фf(x) + γФµ(x)
Where γ is a penalty parameter of a positive or negative constant for the minimization problem
respectively.
7
From the above question we formulate the UC problem as a consignation of total production
costs as the main objective with power balance and spinning reserve as inequality constraints
then we get [2];
𝛾
Ф(x) = F(PtG,xti) + 2 ∑𝑡𝑡=1[𝑐1(PtD –∑𝑛𝑖=1 𝑃 tGi Xit)2 + C2(PtD+Ptk – ∑ℎ𝑖=1 𝑃 tGi(max) Xit)2] (1.7)
1.2.2.3 Evolutionary Algorithms (EAs)
Evolutionary Algorithms are stochastic search and optimization methods that mimic natural
evolution through genetic operators like cross over and mutation. They work with a population
of points each one representing a possible solution in the search space [8].
Natural evolution is a population based optimization process. Evolutionary Algorithms are
different from the conventional optimization methods in that they do not need to differentiate
cost functions and constraints. Theoretically, EA, converge to the global optimum solution.
Since EA require all information to be included in the fitness function, it is very difficult to
consider all OPF constrains. Thus, EAs are generally used to solve a simplified OPF problem
such as the classical economic dispatch, security constrained economic power dispatch and
reactive optimization problem [2].
Advantages of EAs are that it can handle huge search spaces, easy to combine with other
methods and can provide many alternative solutions some of the demerits are; has a weak
theoretical basis, needs extensive parameter tuning and often computationally expensive [8].
1.2.3 Application of Fuzzy Set Theory
The data and parameters used in power system operation are usually derived from many
sources with a wide variance in their occupancy, for example although the average load is
typically applied in power system operation problems; the actual load should follow some
uncertain variations. In addition, generator fuel cost, VAR compensators and peak power
8
saving, may be subject to uncertainty to some degree. To account for the uncertainties in
information and goals related to multiple and usually conflicting objectives in power system
optimization the use of probability theory, fuzzy set theory and analytic hierarchical process
may play a significant role in decision making. The fussy sets may be assigned not only to
objective functions, but also to constraints, especial the non-probabilistic uncertainty
associated with the reactive power demand in constraints [2].
1.3 Summary
Two stage economic dispatch as explained earlier, involve the division of the ED problem into
two stages, stage one and stage two. The first stage involves the classic economic dispatch
without considering the network losses while the second stage consists of classical economic
dispatch considering system power loss and network security constraints. The differential
Evolution method will be used in the optimization of this problem since it’s an EA with albeit
high accuracy and simple implementation as compared to the other optimization techniques.
The other EA, techniques e.g. TS, PSO with their demerits will not be applied.
1.4 Problem Statement
1.4.1 Project Objectives
Objective of this project is to divide the classical economic into two parts and solve it using
the Differential Evolution method (DE) to help increase efficiency. The two-stage economic
dispatch is first broken down into two stages and then solved to give optimal values using DE.
At the end of the project, we should be able to see that indeed the two-stage economic dispatch
solution using DE increases efficiency as compared to the single classical economic dispatch
problem solution by cost minimization and loss reduction.
9
1.5 Project Organization
The project has been organized in to five chapters as follows;
In Chapter 1, Two Stage Economic Dispatch is introduced as well as other optimization
method that can be used to solve it. The project objectives and statement are also discussed.
In Chapter 2, a literature review on two stage economic dispatch has been conducted focusing
on the two stages and how they are differentiated. Thereafter a review of Differential Evolution
has also been done and how it applies to the problem.
In Chapter 3, formulation of the two stage economic dispatch for DE solution has been
discussed in great detail. The pseudo code has been generated and as a flow chart is provided.
In Chapter 4, the simulated results are tabulated and the two stages are compared and discussed
as per the project objectives.
In Chapter 5, conclusions are presented and recommendation for further work stated.
10
CHAPTER 2
Literature Review
2.1 Literature Review on Two-Stage Economic Dispatch
2.1.1 What is Two Stage Economic Dispatch?
The two stages economic power dispatch is divided into two stages as the name suggests. The
first stage involving classical economic power dispatch without consideration of network
losses. The initial generation plans of the generator units are determined according to the rank
of fuel consumption characteristics of the units or the principle of equal incremental rates. The
second stage involves economic dispatch with consideration of system power loss and network
security constraints. Three objectives can be used for the second stage, these are:i)
Minimize fuel consumption
ii)
Minimize system loss
iii)
Minimize movement of generator output from the initial generation plans [2].
2.1.1.1 Economic Power Dispatch - Stage One
The aim of real power economic dispatch is to make the generator’s fuel consumption or the
operating cost of the whole system minimal by determining the power output of each
generating unit under the constraint condition of the system load demands. This is the
“CLASSICAL ECONOMIC DISPATCH”, in which the line security constraints are
neglected. The equal incremental principal can be used for the first stage of economic power
dispatch [2,9].
2.1.1.1.1 Principle of Equal Incremental Rate
Given a system that consists of two generators connected to a single bus serving a received
electrical lead PD. The input output-characteristics of two generating units are F1 (PG1) and F2
(PG2) respectively. The total fuel consumption of the system F is the sum of the fuel
consumptions of the two generating units. Assuming that there is no power output limitation
for both generators, the essential constraint on the operation of this system is that the sum of
the output powers must equal the load demand. The economic power dispatch problem of the
11
system, which is to minimize F under the above-mentioned constraint, can be expressed as
[2,9];
min F= F1(PG1) + F2(PG2)
(2.1)
PG1 + PG2 = PD - ∑𝑁𝐺
𝑖=1 𝑃 gl = PD
(2.2)
According to the principle of equal incremental rate, the total fuel consumption F will be
minimal if the incremental fuel rates of two generators are equal i.e. [2, 9].
𝑑𝐹1
𝑑𝑃𝑔1
=
𝑑𝐹2
𝑑𝑃𝑔2
= 𝜆
(2.3)
𝑑𝐹𝑖
Where is 𝑑𝑃𝑔𝑖the incremental fuel rate of generating unit i, which corresponds to the slope of
the input-output curve of the generating unit. If two generators operate under the different
𝑑𝐹1
𝑑𝐹2
incremental fuel rate, and𝑑𝑃𝑔1 > 𝑑𝑃𝑔2 , the total output powers maintain the same, if generator
1 reduces output power ∆P, generator 2 will increase output power ∆P. Then generator 1 will
𝑑𝐹1
𝑑𝐹2
reduce fuel consumption 𝑑𝑃𝑔1 ∆P, and generator 2 will increase fuel consumption𝑑𝑃𝑔2 ∆P.
The total savings of fuel consumption will be
𝑑𝐹1
𝑑𝐹2
𝑑𝐹1
𝑑𝐹2
∆F = 𝑑𝑃𝑔1 ∆P – 𝑑𝑃𝑔2 ∆P = {𝑑𝑃𝑔1 – 𝑑𝑃𝑔2 } ∆P > 0
(2.4)
𝑑𝐹1
𝑑𝐹2
It can be observed from equation (2.4) above that ∆F will be zero when 𝑑𝑃𝑔1 = 𝑑𝑃𝑔2 that is, the
incremental fuel rates of two generators are equal [9].
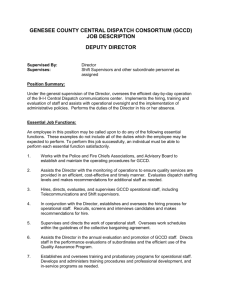
Input-Output Characteristics of Thermal Units
The input-output characteristic are here referred to as the operating cost function. The unit of
the thermal generating units is (MBTU/h). Other costs which are included as a fixed portion of
the operation cost, a part from the fuel consumption cost include:-
Labour cost
-
Maintenance cost
-
Fuel transportation cost
Since it’s generally difficult to express these costs as a function of the output of a unit, they are
usually lumped and included as a fixed cost of the total operation cost.
12
It can be observed that from the input-output characteristics of the generating unit that the
power output is limited by the minimal and maximal capacity of the generating unit [10].
PGmin ≤ Pa ≤ PGmax
As a result, the operating cost of the plant is of the form shown below;
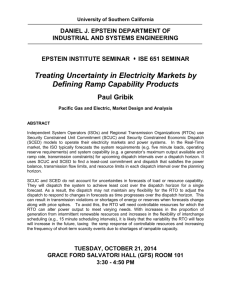
Figure 2. 1 Input-Output Characteristic of a Generating Unit [11]
For dispatching purposes the cost is usually approximated by one or more quadratic segments
so the fuel cost curve is modeled as a quadratic in the active power region.
F= aiP2Gi + biPGi + ci ($/L)
Where a, b, and c are the coefficient of the input-output characteristics, the constants c is
equivalent to the fuel consumption of the generating unit operation without power output. P Gimin
is the minimum loading limit below which it is uneconomical to operate the unit and P Gi max
is the maximum output limit.
The fuel cost curve may have a number of discontinuities which occur when the output power
has to be extended using additional equipment [11].
13
ED Problem in a Bus Bar.
Now assume that it’s a requirement for generators to be run to meet a particular load demand
in a station. Suppose there’s a station with N (or NG) generator committed to this and the entire
power load demand PD, is given. The real power generation (output) PGi for each generator has
to be allocated so as to minimize the total cost. The optimization cost can therefore be stated
as:
Minimize F(PGi) = ∑𝑁
𝑖=1 𝐹 i(PGi)
(2.4.1)
Subject to the following:
∑𝑁
𝑖=1 𝑃 Gi = PD;
energy balance equation
PGimin ≤ PGi ≤ PGimax
Inequality constraints
(2.4.2)
(2.4.3)
Where:
PGi – decision variable i.e. real power generator
PD – real power demand
N – Number of generation plants
Fi(PGi) – operating fuel cost at the ith plan given by:;
Fi(PGi) = GiP2Gi + biPGi + Ci ($/L)
The above constrained optimization problem is converted into an unconstrained optimization
problem. Lagrange multiplier method is used in which a function is minimized or maximized
with side conditions in the form of equality constraints. The augmented function then become:L(PGi, λ) = F(PGi) + λ[PD – ∑𝑁
𝑖=1 𝑃Gi]
λ – Lagrange multiplier
For the function F(PGi) to have a minimum at point PGi, subject to the aforementioned energy
balance constraint, is for the partial derivative of the Lagrange function defined by L = L(PGi;
λ) with respect to each of its arguments, must be equal to zero. The necessary conditions for
the optimization problem become
14
The above equation is the incremented fuel cost and is also the principle of equal incremental
rate.
2.1.1.1.2 Economic Dispatch without Network Losses
2.1.1.1.2.1 Neglecting the Constraints of Power Output
The equal incremental principle, discussed previously, can be used for a system with N
thermal- generating units given that the input-output characteristics of N generating units are
F1 (PG1), F2 (PG2), ………, Fn (PGN), respectively, the total system load is PD. The problem is
to minimize total fuel consumption F subject to the constraint that the sum of the power
generated must equal the received load that is:Min F = F1(PG1) + F2(PG2) + …….+ FN(PGN) = ∑𝑁
𝑖−1 𝐹𝑖 (PGi)
(2.5)
∑𝑁
𝑖−1 𝑃 Gi = PD
(2.6)
This is a constrained optimization problem, and it can be solved by various methods e.g.
Lagrange multiplier methods. First of all, the Lagrange function should be formed by adding,
the constraint function to the objective function after the constraint function has been multiplied
by an undetermined multiplier.
L = F + λ [PD – ∑𝑁
𝑖−1 𝑃 Gi]
(2.7)
Where λ is the Lagrange multiplier. The necessary conditions for the extreme value of the
Lagrange function are to set the first derivative of the Lagrange function with respect to each
of the independent variables equal to zero.
𝑑𝐿
𝑑𝑃𝑔𝑖
𝑑𝐹
= 𝑑𝑃𝑔𝑖 − 𝜆 = 0
i = 1, 2, …………., N
(2.8)
i = 1, 2, ………….., N
(2.9)
or
𝑑𝐹𝑖
𝑑𝑃𝑔𝑖
= 𝜆
Since the fuel consumption function of each generating unit is only related to its own power
output, we have;
𝑑𝐹𝑖
𝑑𝑃𝑔𝑖
= 𝜆
i = 1, 2, ………….., N
(2.10)
Therefore:15
𝑑𝐹1
𝑑𝑃𝑔1
=
𝑑𝐹2
𝑑𝑃𝑔2
= ⋯………..
𝑑𝐹𝑛
𝑑𝑃𝐺𝑁
= 𝜆
(2.11)
The above equation is the principle of equal incremental rate of economic power operation
for multiple generating units [2,9].
2.1.1.1.2.2 Considering the Constraints of Power Output
We have discussed the equal incremental principle of economic operation. We thus know that
the fundamental condition for normal thermal power system operation is for the incremental
fuel of all the generating units to be equal. Incremental fuel rates, also known as incremental
cost (IC) is the slope of the fuel cost curve and the unit is in dollars per megawatt hour (MWh).
IC tells us how much it will cost to operate a generator to produce an additional IMW of power
[2,12]
However, considering power output of each unit should be greater or equal to the minimum
power permitted and must also be less than or equal to the maximum power permitted on that
unit, the problem of economic dispatch can be written as equation 2.5 and 2.6.
The equal incremental principle can still be applied to the equation; the calculation process is
shown below;
i)
Neglect the inequality equation (PGimin ≤ PGI ≤ PGImax) According to the equal
incremental rate, distribute power among the units.
ii)
Using the inequality equation (PGimin ≤ PGI ≤ PGImax) check for the power output
limits. If the power output is out of the limits, set the power output equal to the
corresponding limit, that is:-
iii)
If PGK ≥ PGkmin, PGk = PGKmax
(2.1.1)
If PGk ≤ PGkmin, PGk = PGkmax
(2.1.2)
Handle the violated unit as a negative lead, i.e.
PDk = - PGk
iv)
k = 1, ………., nk
Recomputed the power balance equation as below
𝑛𝑘
∑𝑁
𝑖=1 𝑃 Gi = PD + ∑𝑘=1 𝑃Dk
v)
(2.1.3)
(2.1.4)
Go back to step (i) until all inequalities of units are met.
16
2.1.1.2 Economic Power Dispatch - Stage Two
The second stage of the economic power dispatch includes loss correction and network security
constraints on one hand, the system loss minimization or the fuel consumption minimization
can be selected as objective function. On the other hand, the operators expect optimal dispatch
points close to the economic operation points PGi obtained from the first stage. Thus the
following three objectives may be adopted [2,9].
i)
Minimize the fuel consumption
ii)
Minimize the system loss
iii)
Minimize the adjustment of generator output
The constraints include real power balance, generator power output limits, real power
generation regulations constraint, and branch power flow constraints i.e.
∑𝑖=𝑁𝐺 𝑃Gi = ∑𝑘=𝑁𝐷 𝑃Dk + PL
PGimin ≤ PGi ≤ PGimax
i=1,2, …………………, NG
│Pij│≤ Pijmax
ij= 1,2, ……………..…, NT
|PGi- PGi | ≤ ΔPGRCimax
i = 1, 2, …..………..…., NG
or
ΔPGRCimax + PGi ≤ PGi ≤ ΔPGRCimax + PGi
i=1, 2, ………………..., NG
Thermal Constraint
𝑁𝐺 𝑁𝐺
𝑁𝐺
𝑃𝑙 = ∑ ∑ 𝑃𝑖 𝐵𝑖𝑗 𝑃𝑗 + ∑ 𝐵0𝑖 𝑃𝑖 + 𝐵𝑜𝑜
𝑗=1 𝑖=1
𝑖=1
Where
PD – real power of load
Pij - power flow of transmission line ij
Pijmax – The power limits of transmission line ij.
PGimin – Minimal real power output at generator i
PGi – red power output at generator bus i
PGimax – Maximum real power output at generator i
17
Fi – Fuel consumption function
NG- Number of generators
NT- Number of transmission lines
PL – Network losses
Bij, Boi, Boo – Transmission Coefficients
From the above equations, the economic dispatch model for the second stage can be written as;
minF = h1F1 + h2F2 + h3F3
Where h1 + h2 + h3 = 1
h1 – The weighting factor of the fuel consumption objective function.
h2 – The weighting factor of the loss minimization objective function
h3 - The weighting factor of the generator output adjustment objective function
The weighting factors are determined according to the practical situation of the specific system.
For example if the network loss is the only concern, in a system we can select h2=1 and h1=
h3= 0. If network loss is not a concern and the economy is primary in a system, we can select
h1=1 and h2= h3 = 0 [2].
The economic dispatch model for second stage will be solved using differential evolution (DE)
as will be shown later.
2.1.1.3 Evaluation of System Total Fuel Consumption
This is divided into two main parts.
i)
Total fuel consumed by generator
ii)
Equivalent fuel consumption of system losses
Logically the reference point is taken as the total fuel consumption before optimization and as
such it’s expected that the total fuel consumed in stage two be less than that of the reference
point after optimization.
18
From power flow solutions the initial system power losses, designated PL, can be obtained from
the reference point. A branch flow relation is realized since line constraints before optimization
are not considered. The power violation for the system is hence calculated as:∆Pviol = ∑𝑁𝐼
𝑖𝑗=1(Pij – Pijmax)
(2.11)
NL in this case, is the set of violated branches. Equivalent fuel consumption for the power
violation is computed as;
Fviol = γ2 ∆Pviol
(2.12)
Thus the total fuel consumption of the system before optimization will be:F1T = ∑𝑁𝐺
𝑖=1 𝐹 i(PGi) + γ1PL + γ2∆Pviol
(2.13)
After the two stage economic dispatch the system power losses PL will be computed to find;
F2T = ∑𝑁𝐺
𝑖=1 𝐹 i(PGi) + γ1PL
(2.14)
Where
γ1, γ2- coefficients for converting the system power loss and branch power violation to the fuel
consumption respectively.
F2T ≤ F1T – This is the fundamental requirement of the two – stage economic dispatch where:
F2T- Systems final total fuel consumption
F1T- Systems initial total fuel consumption [2,11,13,14]
2.2 Literature Review on Differential Evolution (DE)
Differential Evolution (DE) is a stochastic search algorithm that was originally motivated by
the mechanism of natural selection, DE effectively solves optimization problem with nonsmooth objective functions. This is so because DE does not require derivative information.
The DE algorithm was first introduced by Storm and Price in 1995 [15]. It differs from
conventional genetic algorithms in the use of perturbing vectors-being the difference between
two parameter vectors, chosen randomly. This concept is borrowed from the simplex
optimization technique. The fundamental idea behind DE is a scheme by which it generates
trial parameter vectors. In each step, DE mutates vectors by adding weighted random vector
19
differentials to them. If the trial vector is better that that of the target, the target vector is
replaced by the trial if the cost of the trial vectors in the next generation [16].
Differential Evolution includes Evolution Strategies (ES) and conventional Genetic
Algorithms (GA). Since it’s a population based search algorithm, DE is therefore an improved
version of Genetic Algorithm. The convergence characteristics and the few control parameters
in DE make it one powerful algorithm for Evolutionary computation. Like other EAs, the first
generation is first initialized randomly and the proceeding generations evolve sequentially
through application of a certain evolutionary operator up to where a stopping criterion is
reached.
2.2.1 The Differential Evolution (DE) Process
The optimization process is carried out as shown below [17];
i)
Choice of Differential Evolution Strategy
ii)
Parameter Set Up/Initialization
iii)
Initialization of Population
iv)
Objective (Evaluation) Function
iii)
Differential Evolution Operators
iv)
Termination Criteria
i)
Choice of DE Strategy
The different variants of DE are classified using the following notation: DE/α|β|δ, where α
indicates the method for selecting the parent chromosome that will form the base of the mutated
vector, β indicates the number of difference vectors used to perturb the base chromosome and
δ indicates the recombination mechanism used to create the offspring population. The bin
acronym indicates that the recombination is controlled by a series of independent binomial
experiment. The Classical DE proposed by Price and Storn uses DE/rand/1/bin, with rand
meaning random [18]. Later variants of DE have since been proposed. The most commonly
used include;
1. DE/best/1/exp
20
2. DE/best/1/bin
3. DE/rand/1/exp
4. DE/rand/1/bin
5. DE/rand-to-best/1/exp
6. DE/rand-to-best/1/bin
7. DE/best/2/exp
8. DE/best/2/bin
9. DE/rand/2/exp
10. DE/rand/2/bin
ii)
Parameter Set Up/Initialization
The user must choose the key parameters that control the Differential Evolution process i.e.
population size (NP), boundary constraints of optimization variables (NG), mutation factor (F),
cross over rate (CR) and the stopping criterion of maximum number of iterations (tmax) [11].
iii)
Initialization of Population
An initial population of vectors (power outputs of generators) is generated randomly with a
uniform probability distribution in an n-dimension parameter space. The entire solution vector
population is initialized within the given upper and lower limits of the search space. In this
work, the power of generators Pi are represented as population individuals in DE.
iv)
Objective (Evaluation) Factor
This represents the requirements the DE algorithm is required to adapt to. It’s what acts as the
interface between Economic Dispatch and Differential Evolution (DE). DE assesses solutions
for their quality (suitable minimization outcome) according to the requirements produced by
this unit. In other words, it represents the task to solve, which in ED case is to minimize the
cost function of generation.
21
v)
Differential Evolution Operators
Mutation Operation
This is an operation that adds a vector differential to a population vector of individual. Mutation
operation using the difference between two randomly selected individuals may cause the
mutant individual to escape the search domain. If an optimized variable for the mutant
individual is outside of the domain search then this variable is replaced by its lower bound or
upper bound so that each individual can be restricted to remain within the search domain [19].
Cross-Over Operation
The cross over operation generates trial vectors (also known as offsprings) by mixing the
parameter of the mutant vectors with the target vectors (known as parents). For each parameter,
a random value based on binomial distribution is generated and compared against a user
defined constant referred as crossover constant (CR). If the random number is less that the
crossover constant the parameter will come from the mutant vector, otherwise the parameter
comes from target (parent) vector. The crossover operation maintains diversity in the
population, preventing local minima convergence [17].
Selection Operation
This is the operation through which better offspring are generated. The evaluation function of
an offspring is compared to that of its parent. The parent is replaced by its offspring if the
fitness of the offspring is better than that of its parent, while the parent is retained in the next
generation if the fitness of the offspring is worse than that of its parent. The selection operator
chooses the vector that is going to compose the population in the next generation, i.e. the one
with the smallest objective value in a minimization problem. The optimization process is
repeated for several generations. This allows individuals to improve fitness while exploring the
solution-space for optimal values [17,19].
Termination Criteria for DE
1. Maximum generations – The genetic algorithm stops when the specified number of
generations have been reached.
22
2. Elapsed time – The genetic process will end when a specified time has elapsed. If the
maximum number of generation has been reached before the specified time has elapsed,
the process will end.
3. No change in fitness – The genetic process will end if there is no change to the
population’s best fitness for a specified number of generations. If the maximum number
of generation has been reached before the specified number of generations with no
changes has been reached, the process will end.
Interface between DE and the Problem Area
DE generates a random population of variables using a uniform binomial distribution and this
represents the population. The population in the ED problem is represented as the output power
of the individual generators. This can be compared to chromosomes in GA which are what
form the basic solution of GA. The target vectors generated during mutation are basically
parents as represented in other EAs, while the trial vectors are offsprings which are a result of
crossover between randomly generated target (parent) vectors. The genes that make up a
chromosome are represented as part of the generators or generation schedules for power
generation.
Table 2. 1 Explanation of Differential Evolution Terms
Differential Evolution
Explanation
Target Vector
Parent
Trial Vector
Offspring
Phenotype
Decoded Solution/Possible Solution
Chromosome (generation schedule/generators)
Solution of optimization problem
Genes (Parts of generation schedule/generators)
Part of the solution of the optimization
problem
Genotype
Encoded
solution
of
the
optimization
problem
23
Advantages of Differential Evolution Method
-
Differential Evolution algorithm has the ability to find the true global minimum
regardless of the initial parameters.
-
Differential Evolution algorithm is fast and simple with regard to application.
-
The algorithm requires few control parameters.
-
It has parallel processing nature, leading to a fast convergence.
-
It is capable of providing multiple solutions in a single run.
-
The method is effective on integer, discrete and mixed parameter optimization.
-
The algorithm has the ability to find the optimal solution for a non-linear constrained
optimization problem with penalty functions.
Disadvantages of Differential Evolution Method
-
The algorithm does not always give an exact global optimum due to premature
convergence.
-
The algorithm ay require tremendously high-computation time because of a large
number of fitness evaluations.
-
In DE, there exists many trials vector generation strategies out of which a few may be
suitable for solving a particular problem.
24
CHAPTER 3
3.1 Formulation of Two Stage Economic Dispatch for DE Solution
3.1.1 First Stage (Classical Economical Dispatch)
Now assume that it’s a requirement for generators to be run to meet a particular load demand
in a station. Suppose there’s a station with N (or NG) generator committed to this and the entire
power load demand PD, is given. The real power generation (output) PGi for each generator has
to be allocated so as to minimize the total cost. The optimization cost can therefore be stated
as depicted by equation 2.4.1 subject to constraints 2.4.2 and 2.4.3 as shown below;
Minimize F(PGi) = ∑𝑁
𝑖=1 𝐹 i(PGi)
(3.1)
Subject to the following:
i.
energy balance equation
∑𝑁
𝑖=1 𝑃 Gi = PD;
ii.
(3.2)
Inequality constraints
PGimin ≤ PGi ≤ PGimax
(3.3)
The fitness function here is basically the Objective Function without the network losses while
taking into account the equality and inequality constraints.
Min Fi(PGi) = ∑𝑁𝐺
𝑖=1 𝐹 i(PG)
(3.3.1)
3.1.2 Second Stage
In the first stage, the network losses and network security constraints were neglected. The
second stage of economic power dispatch includes loss correction and network security
constraints. The following three objectives may hence be adopted here;
i)
Minimization of fuel consumption
Min Fi(PGi) = ∑𝑁𝐺
𝑖=1 𝐹 i(PG)
25
ii)
Minimize the system loss
Min F2 = PL
iii)
Minimize the adjustment of generator output
0
2
Min F3 = ∑𝑁𝐺
𝑖=1(PG – PGi)
The optimization problem hence becomes;
𝑁𝐺
∑𝑁𝐺
𝑖=1 𝑃 Gi = ∑𝑘=1 𝑃D + PL
(3.4)
Subject to the following constraints;
Inequality Constraint
PGi min ≤ PGi ≤ PGi max
i= 1, 2, ……….., NG
(3.4.1)
j = 1, 2, ………..,NT
(3.4.2)
Branch Power Flow Limits
|Pij| ≤ Pijmax
Real Power Generation Regulations Constraint,
|PGi- PGi | ≤ ΔPGRCimax
i = 1, 2, ………………., NG
(3.4.3)
Or
ΔPGRCimax + PGi ≤ PGi ≤ ΔPGRCimax + PGi
i= 1, 2, ……… ……..., NG
Thermal Constraint
𝑁𝐺
𝑁𝐺
𝑃𝑙 = ∑𝑁𝐺
𝑗=1 ∑𝑖=1 𝑃𝑖 𝐵𝑖𝑗 𝑃𝑗 + ∑𝑖=1 𝐵0𝑖 𝑃𝑖 + 𝐵𝑜𝑜
(3.4.4)
From the above equations, the economic dispatch model for the second stage can be written as;
Min F = h1F1 + h2F2 + h3F3
Where h1 + h2 + h3 = 1
h1 – The weighting factor of the fuel consumption objective function.
h2 – The weighting factor of the loss minimization objective function
h3 - The weighting factor of the generator output adjustment objective function
26
The weighting factors are determined according to the practical situation of the specific system.
For example if the network loss is the only concern, in a system we can select h2=1 and h1=
h3= 0. If network loss is not a concern and the economy is primary in a system, we can select
h1=1 and h2= h3 = 0. For this project, economy (fuel consumption factor) was the concern hence
h1 = 1 was chosen and h2 = h3 = 0 [2]. The fitness function is composed of, the objective
function (cost minimization function), the real power balance, generator power output limits,
branch power flow, real power generation regulation constraint, thermal constraints and line
flow constraint.
3.2 DE Algorithm for Two - Stage Economic Dispatch
Step 1: Parameter Set-Up
Initialize the number of generating units N and population size, NP; specify minimum and
maximum capacity of each generator, Pmin and Pmax respectively. Initialize DE parameters such
as cross over probability (CR), amplification factors (F), generation count, (G=0 or t=0), data
input e.g. cost coefficients.
Step 2: Initialization of the population
For a population size, NP and dimension D, an initial vector Ptij is randomly generated. D
represents the number of decision variables to be optimized. In Economic Dispatch D is the
number of generating units considered. Ptij is the real power value of jth unit of the ith population
randomly generated within the operating limits using;
Ptij = Pimin + rand (0, 1) (Pimax – Pimin)
(3.5)
Step 3: Evaluation of fitness function
Evaluate the fitness value of each individual vector Ptij. The fitness of each individual in the
population is evaluated according to the two fitness functions given for the first stage and for
the second stage. The fitness function here differs since the two stages have different
satisfaction criteria.
27
Step 4: Mutation Operation
Perform mutation operation on the target vectors to obtain new parameter vectors called mutant
vectors, given by the equation below;
Zij = Ptij + F(PtRij- PtRij)
(3.6)
F is the scaling (amplification) factor used to control the amplification of the differential
variation and adjust the perturbation size of the mutation.
Step 5: Cross over Operation
The crossover operation is performed to create the trial vectors, which are used in the selection
process. The mutant and target vector combines to form the trial vector. If the generated random
number value is less than or equal to the assumed value of the crossover constant, then the
mutant vector is chosen, else parent vector is chosen as given in equation 3.7. The assumed
crossover constant (CR) should be within the range of (0, 1).
Uijt+1 = {
𝑍𝑖𝑗,
𝑖𝑓 (𝑅4𝑗 ) ≤ 𝐶𝑅
𝑃𝑖𝑗,
𝑖𝑓 (𝑅4𝑗 ) > 𝐶𝑅
(3.7)
Step 6: Selection Operation
Members to constitute the population of the next generation (t + 1) or (G +1) are decided by
the cross-over operation equation. The new vector Uij(t+1) is selected based on the comparison
of fitness of both target vector, Pi and trial vector, Ui. If Pi is fitter (has the smallest cost
function) than Ui, it forms part of the next generation; while if Ui is fitter than Pi, it forms part
of the next generation. This continues generation after generation until a stopping criteria is
met.
Step 7: Verification of Stopping Criterion
Set the generation count t= t+1 or (G = G+1) go to step 3 until stepping criterion is reached.
The stopping criterion considered is usually maximum generation count, tmax (Gmax).
28
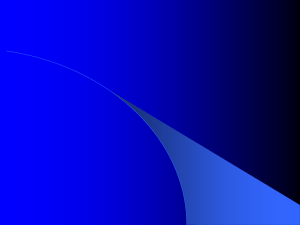
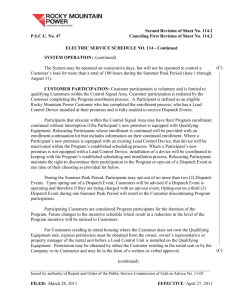
3.3 DE Flowchart for Two - Stage Economic Dispatch
START
Define Cost function variables and
Differential Evolution Parameters
Create initial random population
Perform Power Flow & Evaluate fitness of each
individual in population
Select target vectors (parents) from
current population
Increase number of iterations
Perform mutation (inject new
genetic material into population)
Perform cross-over operation to
generate trial vectors (offsprings)
Evaluate new population by
selection operation
Are there any
violations?
YES
NO
Is the number of
iterations max?
NO
YES
Print best population
output and cost
STOP
Figure
1DEforFlowchart
for Two-Stage
Fig 3.1
Flow 3.
Chart
DE Based 2-Stage
EconomicEconomic
Dispatch Dispatch
29
CHAPTER 4
Results
The differential evolution algorithm has been applied to two different test cases to verify its
feasibility. These are the 14 bus system and the 30 bus system. The results obtained here are
compared for the two stages to see which one is better and hence show that the two-stage
economic dispatch approach is better. A reasonable B-loss coefficients matrix of power
systems network has been employed to calculate transmission losses with a base of 100 MVA.
The program was written using MATLAB 14 software.
Table 4. 1 Differential Evolution Parameters
Population Size
Crossover Rate
Mutation (Amplification) Factor
No. of iterations
20
0.5
0.6
500
4.1 Case 1: 14 Bus System (5 Unit System)
The optimal generation of the five generating units, the optimal costs and the system losses are
shown in tables 4.2 and 4.3 for the system demand of 259.00 MW and 734.98 MW.
Figure 4. 1Single Line Diagram for the IEEE 14 – Bus System [20]
30
Table 4. 2 Optimal Generation for 1st and 2nd Stage using DE, Demand = 147.10MW
Generator No.
Stage One ED
Stage Two ED
P1
50.1200
50.0000
P2
20.0000
20.0100
P3
59.8121
58.8665
P4
10.0031
10.0000
P5
10.0203
10.0000
Total Generation (MW)
149.9555
148.8765
Total Real Power Losses (MW)
2.7356
1.7665
Total Generation Cost
257.5012
256.4836
Table 4. 3 Optimal Generation for 1st and 2nd Stage using DE, Demand = 259.00 MW
Generator No.
Stage One ED
Stage Two ED
P1
50.0010
50.0000
P2
98.3751
94.8168
P3
100.000
100.0000
P4
10.0000
10.0000
P5
10.0000
10.0000
Total Generation (MW)
268.3761
264.8168
Total Real Power Losses (MW)
9.3751
5.816
Total Generation Cost ($)
434.7735
428.5465
31
4.2 Case 2: 30 Bus System (6 Unit System)
The optimal generation of the six generating units, the optimal costs and the system losses are
shown in tables 4.4 and 4.5 for the system demand of 189.20 MW and 308.30 MW.
Figure 4. 2 Single Line Diagram for the IEEE 30 – Bus System [20]
32
Table 4. 2 Optimal Generation for 1st and 2nd Stage using DE, Demand = 189.20 MW
Generator No.
Stage One ED
Stage Two ED
P1
50.0000
50.0000
P2
20.0260
20.0000
P3
89.7974
90.1015
P4
10.5474
10.0000
P5
10.0000
10.0000
P6
12.0063
12.0000
Total Generation (MW)
192.3771
192.1015
Total real power Losses (MW)
3.1772
2.9015
Total Generation Cost ($)
325.3019
323.7436
Table 4. 4 Optimal Generation for 1st and 2nd Stage using DE, Demand = 308.30 MW
Generator No.
Stage One ED
Stage Two ED
P1
50.0000
50.0000
P2
135.3256
133.5899
P3
100.0000
100.0200
P4
10.0016
10.0000
P5
10.0007
10.0000
P6
12.0107
12.0000
Total Generation (MW)
317.3386
315.6099
Total Real Power Losses (MW)
9.0363
7.2899
Total Generation Cost ($)
535.04973
532.4243
33
Analysis and Discussion
500
450
Optimal Cost ($)
400
350
300
250
200
1ST STAGE
150
2ND STAGE
100
50
0
1ST STAGE
147.1
257.5012
259
434.7735
2ND STAGE
256.4836
428.5465
Demand (MW)
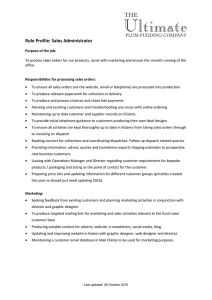
Figure 4. 3 14-Bus Variation of Fuel Cost With Power Demand for First and Second Stage ED
600
Optimal Cost ($)
500
400
300
1ST STAGE
200
2ND STAGE
100
0
1ST STAGE
189.2
325.3019
308.3
535.04937
2ND STAGE
323.7436
532.4243
Demand (MW)
Figure 4. 4 30-Bus Variation of Fuel Cost With Power Demand for First and Second Stage ED
34
14 Bus Real Power Losses Variation with Demand
10
Real Power Losses (MW)
9
8
7
6
5
4
3
2
1
0
147.1
259
First Stage
2.7356
9.3751
Second Stage
1.7665
5.816
Demand (MW)
Figure 4. 5 14 Bus Real Power Loss Variation with Power Demand
30 Bus Real Power Loss Variation with Power Demand
10
Real Power Losses (MW)
9
8
7
6
5
4
3
2
1
0
189.2
308.3
First Stage
3.1772
9.0363
Second Stage
2.9015
7.2899
Demand (MW)
Figure 4. 6 30 Bus Real Power Loss Variation with Power Demand
35
Fig. 4.3 shows the 14 bus variation of optimal fuel cost versus power demand for the first and
second stage ED. The optimal cost for the first stage is slightly higher than the optimal cost of
generation for the second stage. At a demand of 147.10 MW, the optimal cost for the first stage
is $257.5012 while for the same demand, the optimal cost for the second stage is $256.4836.
At a higher demand of 259.00 MW, the costs for the two stages are $434.7735 and $428.5465
respectively.
Fig. 4.4 shows the 30 bus variation of optimal fuel cost versus power demand for the first and
second stage ED. Like the 14 bus, the optimal cost for the first stage is slightly higher than that
of the second stage. At a demand of 189.20 MW, the optimal cost of the first stage is $325.3019
while for the same demand, the optimal cost for the second stage is $323.7436. At a higher
demand of 308.30 MW, the costs for the two stages are $535.04937 and $532.4243
respectively.
From these figures it is clear that the optimal cost of generation increases with increase in
demand. This is because, for low demands, power flow will be within limits or deviate slightly
from the limits but as demand increases, the system resources are stretched and power flows
rising above limits causes the cost to increase.
The cost for the second stage is slightly lower (in both 14 and 30 bus cases) than the first stage
cost. This is so because the first stage employs the classical economic dispatch without
considering network constraints e.g. line constraints. This causes branch flow violations,
leading to increase in cost. The second stage introduces network security constraints and loss
correction into the classical ED. The generating units operate optimally under these set
constraints, leading to a slightly reduced cost.
36
Fig 4.5 and Fig 4.6 show the variation of real power losses with demand. The losses in both
bus cases are higher in the first stage as compared to the second stage. Since the stage one
losses are obtained by power flow solutions, the power flow limits between buses is violated
leading to increase in system losses. The second stage employs loss correction and the system
constraints, hence power flow is within limits, leading to slightly reduced losses than those of
the first stage.
37
CHAPTER 5
Conclusions and Recommendations
5.1 Conclusions
The project scope involved the solution of two stage economic dispatch using DE. The
objectives were to divide the classical economic dispatch into two stages and solve it using DE
in order to effect loss minimization and power generation cost reduction after the second stage
of implementation, therefore increasing efficiency of the system. The results of the first stage
were to then be compared to those of the second stage to see if indeed this feat was achieved.
The proposed algorithm was successfully tested on the IEEE 14 and 30 buses systems and
results obtained.
The DE algorithm used together with introduction of security constraints and loss correction to
the classical ED in the second stage was found to not only reduce real power losses, but also
reduce the generation costs compared to the first stage. Differential Evolution (DE) is therefore
efficient in solving the two stage economic dispatch problem.
5.2 Recommendation
[1] A hybrid algorithm could be considered for the solution of the two stage economic
dispatch to further reduce the real power losses and optimal generation costs.
[2] The results obtained here could be compared to results obtained from the solution of
the two stage method using another Optimization Technique, e.g. PSO.
38
REFERENCES
[1] A. J. Wood and B. F. Wallenberg, Power Generation, Operation and Control, New York:
John Wiley and Sons, 1984.
[2] J. Zhu, Optimization of Power System Operation, New Jersey: John Wiley and Sons,
2009.
[3] J. Zhu, X. Xiaofu, L. Shan, L. Mingzhong, Y. Zhiqiang, S. Bin and L. Cheng, "Two Stage
Approach for Economic Power Dispatch,," Power and Energy Society General Meeting
- Conversion and Delivery of Electrical Energy in the 21st Century, 2008 IEEE, pp. 1-5,
20-24 July 2008.
[4] Y. Yare, G. Venayagamourthy and S. A.Y, "Economic Dispatch of a Differential
Evolution Based Generator Maintenance Scheduling of a Power System," Faculty
Research & Creative Works, 2009.
[5] D. Das, Electrical Power Systems, New Age International, 2007.
[6] F. Glover and M. Laguna, Tabu Search in Modern Heuristic Techniques fr Combinatorial
Problems, John Wiley and Sons, 1993.
[7] J. Kennedy and R. Eberhart, "Particle Swarm Optimization," in Proceedings of the IEEE
International Conference on Neural Networks, 1995.
[8] R. Eberhart and J. Kennedy, "A New Optimizer Using Particle Swarm Theory," in
Proceedings of the 6th International Symposium on Micromachine and Human Science,
1995.
[9] J. Brownlee, Clever Algorithms: Nature Inspired Programming Recipes, Lulu, 2011.
[10] A. Gaspar-Cunha and J. A. Covas, "The Use Of Evolutionary Algorithms To Solve
Practical Problems In Polymer Extrusion," Advances in Natural Computation, vol. 1, pp.
177-199, 2004.
[11] L. Kirchamayer, Economic Operation of Power Systems, New York: John Wiley and
Sons, 1958.
[12] R. Storn and K. Price, "Differential Evolution: A Simple and Efficient Adaptive Scheme
for Global Optimization over Continuous Space," Journal of Global Optimization, pp.
341-359, 1997.
[13] D. Kothari and S. Dhillon, Power System Optimization, PHI Learning Private, 2010.
[14] O. Donald, "Power System Economic Dispatch," 2010.
[15] R. Fletcher, Practical Methods of Optimization, John Wiley and Sons, 1987.
39
[16] J. Nanda and R. Narayan, "Application of Genetic Algorithm to Economic Load Dispatch
with Line Flow Constraints," Electrical Power and Energy Systems, vol. 24, pp. 723-729,
2002.
[17] R. Storn and K. Price, "Differential Evolution: A Simple and Efficient Adaptive Scheme
for Global Optimization over Continuous Space," International Computer Science
Institute, Berkeley, 1995.
[18] C. Leandro and V. Mariani, "Improved Differential Evolution Algorithm for Handling
Economic Dispatch Optimization with Generator Constraints," Energy Conversion and
Management, vol. 48, pp. 1631-1639, 2007.
[19] C. Kumar and T. Alswarmy, "Solution of Economic Dispatch Problem Using Differential
Evolution Algorithm," International Journal of Soft Computing anf Engineeering
(IJSCE), vol. 1, no. 6, pp. 2231-2307, 2012.
[20] K. Price, An Introduction to Differential Evolution, K. V. Price, Ed., London: McGraw
Hill, 1999.
[21] H. J. Huang and F. Wang, "Fuzzy Decision Making Designs of Chemical Plant Using
Mixed-Integer Hybrid Differential Evolution," Computer Chemical Engineering, vol. 26,
no. 12, pp. 1649-1660, 2002.
[22] T. N. Malik, "Economic Dispatch Using Hybrid Approaches," 2009.
[23] K. Price, R. Storn and J. Lampien, Differential Evolution - A Practical Approach to
Global Optimization, Springer-Verlag Berlin Heidelberg, 2005.
[24] A. K. Qin, V. L. Huang and P. N. Suganthan, "Differential Evolution Algorithm with
Strategy Adaptation for Global Numerical Optimization," Evolutionary Computation,
IEEE Transactions on, vol. 13, pp. 398-417, April 2009.
[25] T. Back, Evolutionary Algorithms in Theory and Practice, New York: Oxford University
Press, 1996.
[26] J. Jaser and A. Albert, "Differential Evolution with Random Scale Factor for Economic
Dispatch Considering Prohibited Operating Zones," PRZEGLAD ELEKTRTECHNICZY,
2013.
[27] N. Muthuselran and P. Somasundaram, "Application of Tabu Search Algorithm to
Security Constrained Economic Dispatch," Journal of Theoretical and Applied
Information Technology.
[28] O. Fred and A. Josiah, "Performance Evaluation of Multi Objective Differential
Evolution Algorithm (MDEA) Strategies," International Journal of Physical Sciences,
vol. 8, no. 9, pp. 315-326, 2013.
[29] P. Kothari and I. Nagrath, Modern Power System Analysis, Tata McGraw Hill Education
Private Limited, 2003.
40
APPENDIX
Table 1: IEEE 5-MACHINE 14-BUS SYSTEM GENERATOR’S COST CURVES [20]
Unit
ai
bi
$/(MW)2 $/(MW)
ci
PGImin
PGImax
$
(MW)
(MW)
QGImin
QGImax
(MVAR) (MVAR)
#1
0.0
2.00
0.00375
50
250
-40
100
#2
0.0
1.75
0.0175
20
160
-40
50
#3
0.0
1.00
0.0625
15
100
0
40
#6
0.0
3.25
0.00834
10
70
-6
24
#8
0.0
3.00
0.025
10
60
-6
24
Table 2: LOAD DATA FOR 14-BUS SYSTEM [20]
Bus No.
PD
QD
(MW)
(MVAR)
1
30.38
17.78
2
0.00
0.00
3
131.88
26.60
4
66.92
10.00
5
10.64
2.24
6
15.68
10.50
7
0.00
0.00
8
0.00
0.00
9
41.3
23.24
10
12.60
8.12
11
4.90
2.52
12
8.54
2.24
13
18.90
8.12
14
20.86
7.00
41
Table 3: IEEE 6-MACHINE 30-BUS SYSTEM GENERATOR’S COST CURVES [20]
Unit
ai
bi
$/(MW)2 $/(MW)
ci
PGImin
PGImax
$
(MW)
(MW)
QGImin
QGImax
(MVAR) (MVAR)
#1
0.0
2.00
0.00375
50
250
-40
200
#2
0.0
1.75
0.0175
20
160
-20
100
#5
0.0
1.00
0.0625
15
100
-15
80
#8
0.0
3.25
0.00834
10
70
-15
60
#11
0.0
3.00
0.025
10
60
-10
50
#13
0.0
3.00
0.025
12
80
-15
60
Table 4: LOAD DATA FOR 30-BUS SYSTEM [20]
Bus No.
PD
QD
(MW)
(MVAR)
1
0.0
0.0
2
21.7
3
Bus No.
PD
QD
(MW)
(MVAR)
16
3.5
1.6
12.7
17
9.0
5.8
2.4
1.2
18
3.2
0.9
4
7.6
1.6
19
9.5
3.4
5
94.2
19.0
20
2.2
0.7
6
0.0
0.0
21
17.5
11.2
7
22.8
10.9
22
0.0
0.0
8
3.0
30.0
23
3.2
1.6
9
0.0
0.0
24
8.7
6.7
10
5.8
2.0
25
0.0
0.0
11
0.0
0.0
26
3.5
2.3
12
11.2
7.5
27
0.0
0.0
13
0.0
0.0
28
0.0
0.0
14
6.2
1.6
29
2.4
0.9
15
8.2
2.5
30
10.6
1.9
42
PROGRAM LISTING
% First Stage Code for DE
clear;
clc;
tic;
format short;
global B Pd
% The data matrix should have 5 columns of fuel cost coefficients and plant
limits.
% 1.a ($/MW^2) 2. b $/MW 3. c ($) 4.lower limit(MW) 5.Upper limit(MW)
%no of rows denote the no of plants (n)
ieeetestcase=[0.0000
0.0000
0.0000
0.0000
0.0000
0.0000
2.0000
1.75000
1.0000
3.2500
3.0000
0.0000
0.00375
0.0175
0.0625
0.00834
0.0250
0.0000
50
20
15
10
10
0
250
160
100
70
60
0];
B=1e-2*0*[0.0223 0.0109 0.0003 -0.0011 0.0012 0.0013;
0.0109 0.0139 0.0010 -0.0019 0.0005 0.0008;
0.0003 0.0010 0.0314 -0.0155 -0.0050 -0.0207;
-0.0011 -0.0019 -0.0155 0.0298 0.0055 0.0114;
0.0012 0.0005 -0.0050 0.0055 0.0113 0.0005;
0.0013 0.0008 -0.0207 0.0114 0.0005 0.1248];
Pd = 147.10; % Pd = 259.00;
% Loss coefficients it should be squarematrix of size nXn where n is the no
% of plants
n=length(ieeetestcase(:,1));
% Initialization and run of differential evolution optimizer.
% A simpler version with fewer explicit parameters is in run0.m
%
% Here for Rosenbrock's function
% Change relevant entries to adapt to your personal applications
%
% The file ofunc.m must also be changed
% to return the objective function
%
% VTR
"Value To Reach" (stop when ofunc < VTR)
VTR = 1.e-6;
% D
number of parameters of the objective function
D = n-1;
% XVmin,XVmax
vector of lower and upper bounds of initial population
%
the algorithm seems to work well only if [XVmin,XVmax]
%
covers the region where the global minimum is expected
%
*** note: these are no bound constraints!! ***
XVmin=ieeetestcase(2:n,4)';
XVmax=ieeetestcase(2:n,5)';
% NP
number of population members
NP = 20;
43
% itermax
maximum number of iterations (generations)
itermax = 500;
% F
DE-stepsize F ex [0, 2]
F = 0.6;
% CR
crossover probability constant ex [0, 1]
CR = 0.5;
% strategy
%
%
%
%
1
2
3
4
5
-->
-->
-->
-->
-->
DE/best/1/exp
DE/rand/1/exp
DE/rand-to-best/1/exp
DE/best/2/exp
DE/rand/2/exp
6 -->
7 -->
8 -->
9 -->
else
DE/best/1/bin
DE/rand/1/bin
DE/rand-to-best/1/bin
DE/best/2/bin
DE/rand/2/bin
strategy = 1;
% refresh
%
%
refresh
intermediate output will be produced after "refresh"
iterations. No intermediate output will be produced
if refresh is < 1
= 10;
[x,f,nf] =
devec3('StageOneLossesCode',VTR,D,XVmin,XVmax,ieeetestcase,NP,itermax,F,CR,
strategy,refresh);
[ FirstStageCost, GenerationSchedule,
GenerationLosses]=StageOneLossesCode(x,ieeetestcase);
timer = toc;
%Stage One Losses Calculation/Formulation
function[ FirstStageCost, GenerationSchedule,
GenerationLosses]=StageOneLossesCode(x,data)
global Pd B
x=abs(x);
n=length(data(:,1));
for i=1:n-1
if x(i)<data(i+1,4)
x(i)=data(i+1,4);
else
end
if x(i)>data(i+1,5)
x(i)=data(i+1,5);
else
end
end
P=x;
B11=B(1,1);
B1n=B(1,2:n);
Bnn=B(2:n,2:n);
A=B11;
BB1=2*B1n*P';
B1=BB1-1;
C1=P*Bnn*P';
C=Pd-sum(P)+C1;
x1=roots([A B1 C]);
44
xx=abs(min(x1));
if xx>data(1,5)
xx=data(1,5);
else
end
if xx<data(1,4)
xx=data(1,4);
else
end
GenerationSchedule=[xx P];
for i=1:n
F1(i)=data(i,1)*
GenerationSchedule(i)^2+data(i,2)*GenerationSchedule(i)+data(i,3);
%quadratic cost curve
end
GenerationLosses=3.908*0.7;
%Initial Losses for the non-optimized
system
lam=abs(sum(GenerationSchedule)-Pd-GenerationLosses);
FirstStageCost=sum(F1)+1000*lam;
% Second Stage Code for DE
clear;
clc;
tic;
format short;
global B Pd
% The data matrix should have 5 columns of fuel cost coefficients and plant
limits.
% 1.a ($/MW^2) 2. b $/MW 3. c ($) 4.lower limit(MW) 5.Upper limit(MW)
%no of rows denote the no of plants (n)
ieeetestcase=[0.0000
0.0000
0.0000
0.0000
0.0000
0.0000
2.0000
1.75000
1.0000
3.2500
3.0000
0.0000
0.00375
0.0175
0.0625
0.00834
0.0250
0.0000
50
20
15
10
10
0
250
160
100
70
60
0];
B=1e-2*[0.0223 0.0109 0.0003 -0.0011 0.0012 0.0013;
0.0109 0.0139 0.0010 -0.0019 0.0005 0.0008;
0.0003 0.0010 0.0314 -0.0155 -0.0050 -0.0207;
-0.0011 -0.0019 -0.0155 0.0298 0.0055 0.0114;
0.0012 0.0005 -0.0050 0.0055 0.0113 0.0005;
0.0013 0.0008 -0.0207 0.0114 0.0005 0.1248];
Pd = 147.10; % Pd = 259.00;
% Loss coefficients it should be squarematrix of size nXn where n is the no
% of plants
n=length(ieeetestcase(:,1));
% Initialization and run of differential evolution optimizer.
% A simpler version with fewer explicit parameters is in run0.m
%
% Here for Rosenbrock's function
% Change relevant entries to adapt to your personal applications
%
% The file ofunc.m must also be changed
45
% to return the objective function
%
% VTR
"Value To Reach" (stop when ofunc < VTR)
VTR = 1.e-6;
% D
number of parameters of the objective function
D = n-1;
% XVmin,XVmax
vector of lower and upper bounds of initial population
%
the algorithm seems to work well only if [XVmin,XVmax]
%
covers the region where the global minimum is expected
%
*** note: these are no bound constraints!! ***
XVmin=ieeetestcase(2:n,4)';
XVmax=ieeetestcase(2:n,5)';
% NP
number of population members
NP = 20;
% itermax
maximum number of iterations (generations)
itermax = 500;
% F
DE-stepsize F ex [0, 2]
F = 0.6;
% CR
crossover probabililty constant ex [0, 1]
CR = 0.5;
% strategy
%
%
%
%
1
2
3
4
5
-->
-->
-->
-->
-->
DE/best/1/exp
DE/rand/1/exp
DE/rand-to-best/1/exp
DE/best/2/exp
DE/rand/2/exp
6 -->
7 -->
8 -->
9 -->
else
DE/best/1/bin
DE/rand/1/bin
DE/rand-to-best/1/bin
DE/best/2/bin
DE/rand/2/bin
strategy = 1;
% refresh
%
%
refresh
intermediate output will be produced after "refresh"
iterations. No intermediate output will be produced
if refresh is < 1
= 10;
[x,f,nf] =
devec3('StageTwoLossesCode',VTR,D,XVmin,XVmax,ieeetestcase,NP,itermax,F,CR,
strategy,refresh);
[ SecondStageCost, GenerationSchedule,
GenerationLosses]=StageTwoLossesCode(x,ieeetestcase);
timer = toc;
% Second Stage Losses Calculation/Formulatiom
function[ SecondStageCost, GenerationSchedule,
GenerationLosses]=StageTwoLossesCode(x,data)
global B Pd
x=abs(x);
n=length(data(:,1));
for i=1:n-1
if x(i)<data(i+1,4)
x(i)=data(i+1,4);
else
end
46
if x(i)>data(i+1,5)
x(i)=data(i+1,5);
else
end
end
P=x;
B11=B(1,1);
B1n=B(1,2:n);
Bnn=B(2:n,2:n);
A=B11;
BB1=2*B1n*P';
B1=BB1-1;
C1=P*Bnn*P';
C=Pd-sum(P)+C1;
x1=roots([A B1 C]);
xx=abs(min(x1));
if xx>data(1,5)
xx=data(1,5);
else
end
if xx<data(1,4)
xx=data(1,4);
else
end
GenerationSchedule=[xx P];
for i=1:n
F1(i)=data(i,1)*
GenerationSchedule(i)^2+data(i,2)*GenerationSchedule(i)+data(i,3);
%quadratic cost curve
end
GenerationLosses=GenerationSchedule*B*GenerationSchedule';
lam=abs(sum(GenerationSchedule)-PdGenerationSchedule*B*GenerationSchedule');
SecondStageCost=sum(F1)+1000*lam;
47