L11 Tensor properties, elastic anisotropy, part 4
advertisement

1
27-301
Microstructure-Properties
L11: Tensors and Anisotropy, Part 4
Profs. A. D. Rollett, M. De Graef
Processing
Performance
Microstructure Properties
Last modified: 25th Oct. ‘15
Please acknowledge Carnegie Mellon if you make public use of these slides
2
Objective
• The objective of this lecture is to provide a
mathematical framework for the description of
properties, especially when they vary with
direction.
• A basic property that occurs in almost
applications is elasticity. Although elastic
response is linear for all practical purposes, it is
often anisotropic (composites, textured
polycrystals etc.).
Please acknowledge Carnegie Mellon if you make public use of these slides
3
1.
2.
3.
4.
5.
Questions & Answers
Why is it useful to rotate/transform the compliance tensor or matrix? Often we
need to compute the elastic modulus in some particular direction that is not
[100] or [111]. Why do we compute the compliance rather than the stiffness in
the 1-direction? This is subtle: we use compliance because one can impose a
stress state that has only one non-zero component, from which we only need
the strain component parallel to it. Poisson’s ratio tells us that imposing a strain
in one direction automatically results in lateral strains (unless n=0), which means
that it is not possible to have one and only one strain component contributing to
a particular stress component.
How are the quantities in the equation for the rotated/transformed s11 related
to the same equation with the Young’s moduli in the <100> and <111>
directions? Comparison of the two formulae shows how to relate the three S
values to the Youngs’ moduli in the two directions.
What is Zener’s anisotropy ratio? C' = (C11 - C12)/2; Zener’s ratio = C44/C’.
Which materials are most nearly isotropic? W at room temperature is almost
isotropic and Al is not quite so close to being isotropic.
How do we apply the equations to calculate the variation in Young’s modulus
between [100] and [110] in a cubic metals such as Cu? Direction cosines are the
quantities that are needed to define the direction in relation to the crystal axes.
Please acknowledge Carnegie Mellon if you make public use of these slides
4
Q&A - 2
6.
7.
8.
9.
What are the Lamé constants? These are the two constants l and G that are
needed for isotropic elasticity. What do they have to do with isotropic elasticity?
G has its usual meaning of shear modulus, or C44: see the notes for how they
relate to C11 and C12. How do they relate to Young’s modulus, bulk modulus and
Poisson’s ratio? See the notes for the formulae.
How do we write the piezoelectric matrix for quartz? 6x3 matrix. What stimuli and
responses do each coefficient in the “d” matrix relate? Stimulus is the electric field
and the response is the strain. What are the “BT” and “AT” cuts of a quartz
crystal? These are cuts that maximize the usefulness of the thickness shear mode
of oscillation.
What equation describes the resonant frequency? See the notes. Why does
temperature matter here? Temperature matters because one prefers to have a
crystal that does not change its resonant frequency with temperature. Why does
the density vary as the sum of 2a11+a33? This sum is the trace of the matrix for the
coefficient of thermal expansion, i..e the variation in volume with change in T.
How does the angle q relate to the AT and BT cuts already described? This angle is
a rotation of the normal to the surface of the crystal in the y-z plane (i.e. rotation
about x). How do we set up the equation that tells us the variation in d66 with
angle of cut? The Eq we need is that which describes the rate of change of
resonant frequency with temperature.
Please acknowledge Carnegie Mellon if you make public use of these slides
5
Rotated compliance (matrix)
Given an orientation aij, we transform the compliance tensor,
using cubic point group symmetry:
Writing this out in full for the 1111 component:
Re-writing this with vector-matrix notation gives:
(
S1¢ 1 = S1 1 a141 + a142 + a143
(
)
)
+ 2S1 2 a1 2a1 3 + a1 1a1 2 + a1 1a1 3
(
2
2
2
2
2
2
+ S4 4 a1 2a1 3 + a1 1a1 2 + a1 1a1 3
2
2
2
2
2
2
)
Please acknowledge Carnegie Mellon if you make public use of these slides
6
Rotated compliance (matrix)
• This can be further simplified with the aid of the standard
relations between the direction cosines,
aikajk = 1 for i=j; aikajk = 0 for ij, (aikajk = ij)
to read as follows:
s1¢ 1 = s1 1 -
(
){
2 s1 1 - s1 2 - 1 s4 4 a12 a 22 + a 22 a 23 + a 32a 12
2
}
• By definition, the Young’s modulus in any direction is given by
the reciprocal of the compliance, E = 1/S’11.
• Thus the second term on the RHS is zero for <100> directions
and, for C44/C'>1, a maximum in <111> directions (conversely
a minimum for C44/C'<1).
Please acknowledge Carnegie Mellon if you make public use of these slides
7
Anisotropy in terms of moduli
• Another way to write the above equation is to
insert the values for the Young's modulus in the
soft and hard directions, assuming that the <100>
are the most compliant direction(s). (Courtney
uses a, b, and g in place of my a1, a2, and a3.)
The advantage of this formula is that moduli in
specific directions can be used directly.
ì 1
1
1
1 ü 2 2
2 2
2 2
=
- 3í
ý(a1 a 2 + a2 a 3 + a3 a1 )
Euvw E100 î E100 E111þ
Please acknowledge Carnegie Mellon if you make public use of these slides
8
Cubic crystals: anisotropy factor
• If one applies the symmetry elements of the
cubic system, it turns out that only three
independent coefficients remain: C11, C12 and
C44, (similar set for compliance). From these
three, a useful combination of the first two is
C' = (C11 - C12)/2
• See Nye, Physical Properties of Crystals
Please acknowledge Carnegie Mellon if you make public use of these slides
9
Zener’s anisotropy factor
• C' = (C11 - C12)/2 turns out to be the stiffness
associated with a shear in a <110> direction on a
{110} plane. In certain martensitic
transformations, this modulus can approach zero
which corresponds to a structural instability.
Zener proposed a measure of elastic anisotropy
based on the ratio C44/C'. This turns out to be a
useful criterion for identifying materials that are
elastically anisotropic.
Please acknowledge Carnegie Mellon if you make public use of these slides
10
Anisotropy in cubic materials
• The following table shows
that most cubic metals have
positive values of Zener's
coefficient so that <100>
is most compliant and
<111> is most stiff,
with the exceptions of V, Nb
and NaCl.
Material
Cu
Ni
A1
Fe
Ta
W (2000K)
W (R.T.)
V
Nb
b-CuZn
spinel
MgO
NaC1
C44/C'
3.21
2.45
1.22
2.41
1.57
1.23
1.01
0.78
0.55
18.68
2.43
1.49
0.69
E111/E100
2.87
2.18
1.19
2.15
1.50
1.35
1.01
0.72
0.57
8.21
2.13
1.37
0.74
Please acknowledge Carnegie Mellon if you make public use of these slides
11
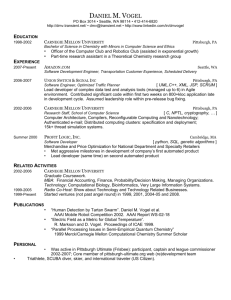
Stiffness coefficients, cubics
Units:
1010 Pa
or
10 GPa
Nb (niobium): beta1=17:60 (TPa)-1 , Bcub= 0.50. s11 = 6.56, s44 = 35.20, s12 = -2.29 (in (TPa)-1 ). Emin = 0.081,
Emax = 0.152 GPa.
12
Example Problem
[Courtney]
Should be E<111>= 18.89
Please acknowledge Carnegie Mellon if you make public use of these slides
13
Lamé constants
(isotropic elasticity)
For an elastically isotropic body, there are only 2
elastic moduli, known as the Lamé constants.
Please acknowledge Carnegie Mellon if you make public use of these slides
14
Young’s, Bulk moduli, Poisson’s ratio
Please acknowledge Carnegie Mellon if you make public use of these slides
15
Engineering with the
Piezoelectric Effect
•
•
•
[Newnham, sections 12.8 and 13.10] The use of quartz as a resonant crystal for
oscillator circuits with highly stable frequency depends strongly on the details of
its properties.
Although quartz is only weakly piezoelectric, other aspects of its properties
provide the key, namely thermal stability.
Most elastic stiffness coefficients have negative temperature coefficients,
meaning that materials become less stiff with rising temperature. The c66
coefficient of quartz, however, is positive; Table 13.7. This offsets the effect of
thermal expansion, which increases dimensions and decreases density. This is
what makes it possible to have an oscillator that is insensitive to temperature
changes.
d11 = 2.27; d14 =-0.67 pC/N
http://en.wikipedia.org/
wiki/Electromagnetic_aco
ustic_transducer
Please acknowledge Carnegie Mellon if you make public use of these slides
16
Quartz Oscillator Crystals, contd.
• Resonant frequency, f, for thickness (t)
shear mode, as a function of the rotation
of axes to get c’66, where r is the density:
• AT and BT cut modes are thickness shear
modes driven by the piezoelectric
coefficient d’26:
e’6 = d’26 E’2
A particular angle must
be determined for the
ideal cut to minimize the
temperature
dependence of the
resonant frequency.
Please acknowledge Carnegie Mellon if you make public use of these slides
17
Quartz Oscillator Crystals, contd.
• Temperature dependence of the resonant frequency, f, for
thickness (t) shear mode, as a function of the rotation of axes
to get c’66, where r is the density:
• Temperature derivative of the density:
• Temperature derivative of the thickness in the Z’2 (Y’) direction:
• Transformed (rotated) stiffness coefficient:
Please acknowledge Carnegie Mellon if you make public use of these slides
18
Quartz Oscillator Crystals, contd.
• Quartz belongs to point group 23. Therefore c1313 = c55 = c44
and c1213 = c65 = c56 = c14.
• Taking the temperature derivative for c’66 and substituting all the
relevant values into the equation, one obtains the following. Here,
“T(c66)” denotes the temperature coefficient of the relevant stiffness
coefficient (Table 13.7). The derivative of the resonant frequency, f,
can be set equal to zero in the standard fashion in order to find the
minima.
• Applying the solution procedure yields two values with theta = 35° and +49°, corresponding to the two cuts illustrated.
• Further discussion is provided by Newnham on how to make AC
and BC cuts that are useful for transducers for transverselypolarized acoustic waves.
Please acknowledge Carnegie Mellon if you make public use of these slides
19
Summary
• We have covered the following topics:
– Examples of elastic property values
– Anisotropy coefficients (Zener)
– Dependence of Young’s modulus on direction (in a
crystal)
– Worked example
– Quartz oscillator crystals
Please acknowledge Carnegie Mellon if you make public use of these slides
20
Supplemental Slides
• The following slides contain some useful material
for those who are not familiar with all the
detailed mathematical methods of matrices,
transformation of axes etc.
Please acknowledge Carnegie Mellon if you make public use of these slides
21
Notation
F
R
P
j
E
D
e
r
d
Stimulus (field)
Response
Property
electric current
electric field
electric polarization
Strain
Stress (or conductivity)
Resistivity
piezoelectric tensor
C
S
a
W
I
O
Y
e
T
elastic stiffness
elastic compliance
rotation matrix
work done (energy)
identity matrix
symmetry operator (matrix)
Young’s modulus
Kronecker delta
axis (unit) vector
tensor, or temperature
a direction cosine
Please acknowledge Carnegie Mellon if you make public use of these slides
22
Bibliography
•
•
•
•
•
•
•
•
•
•
•
•
R.E. Newnham, Properties of Materials: Anisotropy, Symmetry, Structure, Oxford
University Press, 2004, 620.112 N55P.
De Graef, M., lecture notes for 27-201.
Nye, J. F. (1957). Physical Properties of Crystals. Oxford, Clarendon Press.
Kocks, U. F., C. Tomé & R. Wenk, Eds. (1998). Texture and Anisotropy, Cambridge
University Press, Cambridge, UK.
T. Courtney, Mechanical Behavior of Materials, McGraw-Hill, 0-07-013265-8, 620.11292
C86M.
Landolt, H.H., Börnstein, R., 1992. Numerical Data and Functional Relationships in
Science and Technology, III/29/a. Second and Higher Order Elastic Constants. SpringerVerlag, Berlin.
Zener, C., 1960. Elasticity And Anelasticity Of Metals, The University of Chicago Press.
Gurtin, M.E., 1972. The linear theory of elasticity. Handbuch der Physik, Vol. VIa/2.
Springer-Verlag, Berlin, pp. 1–295.
Huntington, H.B., 1958. The elastic constants of crystals. Solid State Physics 7, 213–351.
Love, A.E.H., 1944. A Treatise on the Mathematical Theory of Elasticity, 4th Ed., Dover,
New York.
Newey, C. and G. Weaver (1991). Materials Principles and Practice. Oxford, England,
Butterworth-Heinemann.
Reid, C. N. (1973). Deformation Geometry for Materials Scientists. Oxford, UK,
Pergamon.
Please acknowledge Carnegie Mellon if you make public use of these slides
23
Transformations of Stress & Strain Vectors
• It is useful to be able to transform the axes of s ¢i = a ijs j
stress tensors when written in vector form
-1
s
=
a
i
ij s ¢j
(equation on the left). The table (right) is
taken from Newnham’s book. In vector-matrix e¢i = a -1T
ij e j
form, the transformations are:
ei = a Tij e¢j
æ s1¢ ö éa11
ç ÷ ê
çs ¢2 ÷ êa 21
çs ¢3 ÷ êa 31
ç ÷=ê
çs 4¢ ÷ êa 41
çs ¢5 ÷ êa 51
ç ÷ ê
ès ¢6 ø ëa 61
a12
a 22
a 32
a 42
a 52
a 62
a13
a 23
a 33
a 43
a 53
a 63
a14
a 24
a 34
a 44
a 54
a 64
a15
a 25
a 35
a 45
a 55
a 65
a16 ùæ s1 ö
úç ÷
a 26 úçs 2 ÷
a 36 úçs 3 ÷
úç ÷
a 46 úçs 4 ÷
a 56 úçs 5 ÷
ç ÷
a 66 úûès 6 ø
Please acknowledge Carnegie Mellon if you make public use of these slides