AnIntroductionOceanModeling
advertisement

Page |1
Basic concepts of numerical
modeling in ocean and
atmosphere
Lie-Yauw Oey
Princeton University
lyo@princeton.edu
Page |2
Basic concepts of numerical modeling in ocean and atmosphere
Training Course Session#1
IWMO3, Qingdao, China, Jun/10/2011
L.-Y. Oey
Princeton University
lyo@princeton.edu
Lecture 1: Basic geophysical fluid dynamics
(a) wind waves & flows without rotation;
(b) flows constrained by rotation - Taylor column;
(c) effects of friction: Ekman dynamics;
(d) Sverdrup balance and western boundary current;
(e) instability, waves & eddies.
Lecture 2: Basic numerical techniques
(a) finite-difference grid & approximation;
(b) time and space differencing - the advection equation;
(c) consistency, accuracy & stability;
(d) implicit scheme;
(e) boundary conditions, air-sea coupling.
Lecture 3: Numerical GFD experiments with the Princeton Ocean Model: Descriptions
(practice to be given in Toni Jordi’s PM session)
(a) 1-D step and block-propagation problems;
(b) Taylor column;
(c) Surface and bottom Ekman layers;
(d) Western Boundary Current – Stommel & Munk;
(e) Estuarine plume debouching onto a continental shelf;
(f) Estuarine plume with tide;
(g) Baroclinic waves and eddies;
(h) Wetting & Drying.
Pls. download codes, runscripts, inputs and outputs etc from:
ftp://aden.princeton.edu/pub/lyo/iwmo3/training-class/
for parallel mpiPOM/sbPOM versions; and from:
ftp://aden.princeton.edu/pub/lyo/pom_gfdex/wmo09training/anIntroCourseNumOcean
ExpsUsingPOM/
for POM08/POM2k versions.
Page |3
Chapter 1: Flows without Rotation
1.1 Waves at the Ocean’s Surface:
Let u = (u, v, w) be the velocity field and z = (x,y,t) be the free surface
(Fig.1); and assume ||/H<<1, and also that water density = o = constant:
Fig.1.1-1.
Momentum: o u/t = p’,
(1.1-1)
where
p’ = ptotal (patmos ogz)
(1.1-2)
Then
(u)/t = 0, flow is irrotational
(1.1-3)
Therefore,
u = ;
(1.1-4)
Water is incompressible:
where = velocity potential
.u = 0 2 = 0
(1.1-5)
This is a Laplace eqn.; waves are due entirely to the undulating .
At z = , ptotal = patmos, so that:
(1.1-2)
p’ = og,
at z = 0
(1.1-6)
Use (1.1-4) & (1.1-6), then:
(1-1)
/t = g,
Also,
/t = w = /z,
at z = 0
at z = 0, (since D(z)/Dt = 0).
(1.1-7)
(1.1-8)
Page |4
(1.1-7) & (1.1-8) 2/t2 = g/z,
at z = 0
(1.1-9)
We assume a flat-bottom ocean H(x,y) = h = constant. Then:
w = /z = 0,
at z = H, (since D(z+H)/Dt = 0).
~ 0, z ~ , i.e. for large H (deep water)
or
(1.1-10a)
(1.1-10b)
Eqns.(1.1-5), (1.1-9) and (1.1-10) are the surface-wave equations.
Look for a sinusoidal solution (also simplify to xz-t):
= (z).exp[i(tkx)], = frequency & k = wave number
(1.1-11)
(1.1-5)&(1.1-10a) (z) = o cosh[k(z+H)]
(1.1-12)
Then the surface condition (1.1-9) gives the dispersion relation:
2 = gk.tanh(kH) (dispersion relation)
(1.1-13)
Velocity:
u = (kgo/). sin(kxt).cosh[k(z+H)]/cosh(kH)
w = (kgo/).cos(kxt).sinh[k(z+H)]/cosh(kH)
= o sin(kxt)
(1.1-14a)
(1.1-14b)
(1.1-14c)
Shallow-water limit kH << 1: tanh(kH) ~ kH, c = /k (gH)1/2
u ~ (kgo/). sin(kxt); w ~ 0
(1.1-15)
Deep-water limit kH >> 1: tanh(kH) ~ 1,
c = /k (g/k)1/2
(u,w) ~ (kgo/).exp(kz).{cos(kxt),sin(kxt)}.
(1.1-16)
Table 1.1-1 Typical values of deep-water waves, H >> /(2)
(m)
1
10
100
1000
c (m/s)
1.25
4
12.5
40
tp (s)
0.8
2.5
8
25
Water deeper than H (m) ~ /2
0.5
5
50
500
Page |5
1.2 Shallow-Water & Large-Scale Flows of Constant Density ( = o):
When 2H/ << 1, (1.1-15) w ~ 0, and u = (u,v) function(z), so
(1.1-7) applies to all z. Then, (1.1-7):
u/t + f k×u = g
(1.2-1)
where (because of large scale) a Coriolis acceleration due to the earth
rotation 2sin() = f (where = latitude, and = 2/86400 s-1) has been
added.
∂p/∂z = −ρg; so that p = pa − ρgz + ρgη
Hydrostatic:
(1.2-2)
Mass conservation:
/t + .(Du) = 0, D = H(x,y)+(x,y,t)
or, linearized,
/t + .(Hu) = 0.
Fig.1.2-1. The atmosphere and ocean are thin, so vertical motions are
approximately hydrostatic. Large-scale flows are significantly affected
by the earth’s rotation.
(1.2-3a)
(1.2-3b)
Page |6
An Application of Hydrostacy:(IWMO3.2b)
Fig.1.2-2
Mass × Accel. = Pressure Force
c xyz × u/t = (pA pB) yz
u/t = p/x
Page |7
u/t = g/x or g’/x
1.3 Step and Block Propagation problems:
Eqns.(1.2-1) & (1.2-3b) in full:
𝜕
+
𝜕𝑡
𝜕𝑢𝐻
𝜕𝑥
+
𝜕𝑣𝐻
𝜕𝑦
=0
𝜕𝑢
𝜕
𝜕𝑣
𝜕
(1.3-1a)
𝑥
( 𝜕𝑡 ) = +𝑓𝑣 − 𝑔 𝜕𝑥 + (𝜏𝑤
− 𝑟𝑢)/𝐻
(1.3-1b)
𝑦
( 𝜕𝑡 ) = −𝑓𝑢 − 𝑔 𝜕𝑦 + (𝜏𝑤 − 𝑟𝑣)/𝐻
(1.3-1c)
For f=0, no wind and no friction, we can derive the wave
equation (c2=gH):
∂2η/∂t2 – (c2∂η/∂x)/x (c2∂η/∂y)/y = 0
(1.3-2)
1-D solution:
Suppose that at t=0, u=0, and = G(x)
(1.3-3)
Then the solution to (1.3-2) in 1-D for H=constant is:
= [G(x+ct) + G(x-ct)]/2
(1.3-4)
u = (g/c) [G(x+ct) G(x-ct)]/2
(1.3-5)
where (1.3-5) follows by using (1.3-4) in (1.3-1b).
Step propagation: suppose G(x) = o sgn(x)
(1.3-6)
then, = o[sgn(x+ct)+sgn(x-ct)]/2
(1.3-7)
and u = (og/c)[sgn(x+ct)sgn(x-ct)]/2
(1.3-8)
See figure 1.3-1.
Page |8
Fig.1.3-1 Step propagation. (IWMO3.2e)
KE/area = u2/2 dz H(og/c)2/2 = go2/2
PE/area = gz dz = g[o2H2]/2
(where is from z=H to z=).
The perturbation PE/area is then go2/2 =
KE/area.
Therefore, the initial PE/area due to = o sgn(x)
at t=0 is all converted to KE/area to generate
Page |9
current in the direction of “high pressure to low
,” i.e. direction of /x.
Block propagation (fig.1.3-2): (IWMO3.3b)
At t=0, G(x) = o for |x| < L, and =0 for |x|>L.
(1.3-9)
In this case, the solution is most easily obtained graphically
(keep in mind equations 1.3-4 and 1.3-5) as shown in fig.1.3-2.
Fig.1.3-2 Block propagation. (IWMO3.3e)
PE/y-length = PE(0) = gz dzdx = go2L
(where is from H to z=, and L to +L).
For t > L/c, each block of height o/2 has PE = g(o2/4)/2×2L = PE(0)/4.
The KE of each block = HLu2 = HLo2g2/4c2 = go2L/4 = PE(0)/4.
Total energy is PE(0)/2 per block, i.e. = PE(0) for 2 blocks.
P a g e | 10
Numerical Experiments:
The step and block propagation problems can be downloaded from:
ftp://aden.princeton.edu/pub/lyo/pom_gfdex/wmo09training/anIntroCours
eNumOceanExpsUsingPOM/gill_blok_and_step_prop/
Chapter 2: Flows with Rotation(IWMO3.4b)
In Fig.2-1, outward centrifugal force is balanced by radial pressure force
due to gravity associated with sea-surface tilt:
Fig.2-1
V2/r = (p/r)/ = g(h/r) (from 1.2-2)
(2-1)
Here, “V” is the azimuthal velocity in a fixed frame of reference. Fluid
parcel moves relative to the rotating “table” (the earth) with (u,v) =
(radial, azimuthal) velocities as shown. We have:
V = r + v
Conservation of Angular Momentum:
(2-2)
P a g e | 11
Suppose a parcel is initially at the rim of the rotating table and is at rest
relative to the table: (u,v) = (0,0). Imagine that the parcel moves
towards the center – then conservation of angular momentum:
V.r = v.r + .r2 = constant = .r12, where r1 = table’s radius
v = [1 (r/r1)2](r12/r)
(2-3)
so that the parcel spins faster and faster around the center of the table (in
the same direction as , since r/r1 < 1) as it traverses towards the center.
GFD3_slow_rotation.mpeg
GFD3_fast_rotation.mpeg
Gradient Wind Balance:
Eqn.2-2 into 2-1 gives:
v2/r + 2v = g/r, where = h g-12r2/2
(2-4)
where is the height of the free surface relative to a time-independent
reference parabolic surface z = g-12r2/2.
Rossby Number Ro:
This is normally defined as
Ro = U/(2.L)
(2-5)
where U and L are velocity and horizontal length scales respectively. In
(2-4) one can define Ro = v/(2r), so that:
Ro2 + Ro = gr-1(/r)/(2)2;
where Ro = v/(2r)
(2-6)
Cyclostrophic Balance:
For large Ro, i.e. inside a tornado, eqn.(2-6)
Ro2 gr-1(/r)/(2)2 or v2/r g/r
(2-8)
Geostrophic Balance:
For small Ro, i.e. large-scale oceanic and atmospheric flows, eqn. (2-6)
P a g e | 12
Ro gr-1(/r)/(2)2 or 2v g/r
(2-7)
For the remaining of the lecture, we will almost exclusively deal with
small Ro.
Taylor Column:
For small Ro, the flow is nearly geostrophic, then (c.f. equation 1.2-1)
2 × u = p/
Take the curl of (2-9), and note that
(2-9)
×( × u) = (.u) u(.) + (u.) (.)u = (.)u
[Use ×(a × b) = a(.b) b(.a) + (b.)a (a.)b], and also,
×(p/) = -1×p -2(×p) = -2(×p), we have:
2(.)u = -2(p×)
If p and surfaces coincide – fluid is barotropic, then
(.)u = 0
and the u does not change in the direction of the -axis (z), i.e. flow is 2D.
(2-10)
(2-11)
Figure 2-2. Nearly-steady homogeneous (constant-density) flow in an x-periodic channel, 600km by
300km, of depth 200m except at the channel’s center where a cylinder rises 50m above the bottom.
Color is sea-surface height in meters and vectors are velocity at (A) z=0m (i.e. surface), (B) z=90m
P a g e | 13
and (C) z=180m.
This model calculation was carried out for 100 days when the flow has reached a
nearly steady state.
The experiment is meant to illustrate Taylor-Proudman theorem: flow below the
cylinder’s height goes around the cylinder while above it the flow also tends to go around as if the
cylinder extends to the surface.
is not shown) is nearly zero.
The velocity does not vary with “z” and the vertical velocity (which
GFD7_taylor .mpeg
Thermal Wind Balance – how Gravitational Collapse is arrested by
Rotation:
If fluid is baroclinic, i.e. p and surfaces do not coincide, then since the
pressure field is nearly hydrostatic, i.e. -1p gk
(2-12)
eqn.(2-10) becomes:
2.u/z = -1gk×
(2-13)
This is thermal-wind equation – see Fig.2-3.
Fig.2-3 Illustration of thermal wind equation (2-13):
1 Vortex tube with background cyclonic is tilted by shear u(z) ..
2 producing cyclonic vorticity in x-direction..
3 the yz-circulation due to the x-cyclonic vorticity is to tilt the
=constant isopycnal as shown, against
4 the gravitational tendency to collapse it to a level position.
P a g e | 14
Fig.2-4 Note that the u/z produces x-vorticity x in the sense that
tends to oppose the gravitational collapse(IWMO3.4e)
Effects of Friction: (IWMO3.5b)
𝜕
𝜕𝑡
=−
𝜕𝑈
𝜕𝑥
−
𝜕𝑉
(2-14a)
𝜕𝑦
𝐷𝑢
𝜕
𝐷𝑡
𝜕𝑥
𝐷𝑣
𝜕
𝐷𝑡
𝜕𝑦
( ) = +𝑓𝑣 − 𝑔
( ) = −𝑓𝑢 − 𝑔
+
+
𝜕
𝜕𝑧
𝜕
𝜕𝑧
(𝐾𝑀
(𝐾𝑀
𝜕𝑢
𝜕𝑧
𝜕𝑣
𝜕𝑧
)
(2-14b)
).
(2-14c)
Fig.2-5 Modification of geostrophic balance fz×u = p/ by friction.
Dropping the D/Dt and pressure terms from (2-14b,c), and integrating dz
form z=E to z=0, we have Ekman transport UE = (UE,VE) produced by
wind stress o = (x, y):
fz×UE = o, or fVE = x & +fUE = y
(2-15)
P a g e | 15
similarly for bottom stress b – see Fig.2-5 – note how friction can
produce Ekman transport from high to low pressure.
Fig.2-6 Low pressure center produces convergence (left), hence
upwelling; and vice versa for high pressure center (right).
Fig.2-7.
Nearly-steady
homogeneous
(constant-density)
wind-driven rotational flow in a channel of depth 200m and
theoretically unbounded in x, but in practice an x-length = 1000 km
is used in the solution. The flow is assumed independent of y.
The wind stress is specified in y-direction only: (0, 10-4).(x/500km
1) m2 s-2. Panel (A) is for the y-directed velocity and panel (B)
the x-directed velocity. In (B), profiles of u are also plotted at the
P a g e | 16
four indicated x-locations with scales 0.1 m/s given along the
bottom for the first and fourth locations. Detailed plots comparing
the profile at x=205 km (i.e. the first x-location) with analytical
solution are given in Figure 1-10. The Coriolis parameter is
constant, fo = 610-5 s-1, and the vertical eddy viscosity is also
constant, K = 510-3 m2 s-1. This numerical solution is at time =
100 days, and differs slightly from the analytical one discussed in
the text; instead of the no-slip condition at the bottom, a matching
of the velocity to the law-of-the-wall log layer is used [see the POM
manual by Mellor, 2004].
P a g e | 17
Simple Ideas of Frictional Spindown and Buoyancy Shutdown
Ocean is spun down by friction frictional spindown. But with stratification and
bottom slope, it is possible that bottom mixing (w/stratification+slope) produces
horizontal density gradients, hence thermal-wind shear in the mixed layer so that the
interior flow “sees” a slippery bottom and Ekman pumping & friction are shutdown
buoyancy shutdown.
Rough derivations:
To compute /y due to bottom slope h/y and bottom mixing (downwelling case),
we consider an isopycnal =constant; then = 0 = /z h + /y y
so that
/y = -/z.h/y so that (g/o)/y = N2.hy, where N2 = -g(/z)/o. Or,
with b = -g/o we have: b/y = -N2hy where N2 = b/z.
By geostrophy within the mixed layer, we have fu = -p/y/o, so that fu/z = +(g/o)
/y = -b/y = N2hy from previous equation. So that integrating across ML, from
z=-h to z=-h+, where = ML thickness:
ui – u = (-h+-z) N2hy assuming that N2 is constant. Therefore: u=ui-(-h+-z) N2hy.
Note:
(a) buoyancy shutdown arises only if bottom has slope h/y0;
(b) if hy is =0, then u = ui extending all the way to bottom, and the interior flow is
then subject to frictional spindown (because then b = -rui operates);
P a g e | 18
(c) basically, at buoyancy shutdown, the ui is canceled by thermal-wind part and
b=0.
References:
Garrett, MacCready & Rhines, Ann. Rev. Fluid Mech, 1993, 291-323.
Chapman, JPO, 2002, 336-352.
(IWMO3.5e)
P a g e | 19
Convective, Symmetric & Baroclinic Instabilities Made Simple
The atmosphere and ocean are full of waves and eddies.
P a g e | 20
Chapter 3: A Model of Large-Scale Ocean Gyre & Western
Boundary Current
In this section, unless otherwise stated, all variables will be dimensional.
Consider a “box” ocean with sides Lx and Ly on a -plane (Figure 3-1).
A zonal wind stress is applied:
𝝉𝑤 = (−𝜏𝑤𝑜 cos(𝑦/𝐿𝑦 ), 0)
(3-12)
𝑐𝑢𝑟𝑙𝑧 (𝝉𝑤 ) = −(𝜏𝑤𝑜 /𝐿𝑦 )sin(𝑦/𝐿𝑦 )
(3-13)
so that
where wo (which will be set = 10-4 m2s-2 below) is the magnitude of the
(kinematic) wind stress. Initially, the fluid is at rest:
(u, v, w) = (0, 0, 0), and also, free surface = 0
(3-14)
At the four side walls, both the normal and tangential components of the
horizontal velocities are zero:
(u, v) = (0, 0) at x = 0, x = Lx and also at y = 0, y = Ly.
(3-15)
At the ocean bottom and at the free surface, equations (1-31) are
satisfied:
𝑤=
𝜕
𝜕
𝜕
+ 𝑢 𝜕𝑥 + 𝑣 𝜕𝑦 , 𝑎𝑡𝑧 = (𝑥, 𝑦, 𝑡),
𝜕𝑡
𝜕𝐻
𝜕𝐻
𝑤 = −𝑢 𝜕𝑥 − 𝑣 𝜕𝑦 ,𝑎𝑡𝑧 = −𝐻(𝑥, 𝑦).
(3-16a)
(3-16b)
The continuity equation and the x and y momentum equations are then
(c.f. 1-35): (IWMO3.6b)
𝜕
𝜕𝑡
𝜕𝑈
𝜕𝑉
= − 𝜕𝑥 − 𝜕𝑦
𝜕𝑢
(3-17a)
𝜕
𝜕
𝜕𝑢
( 𝜕𝑡 ) = +𝑓𝑣 − 𝑔 𝜕𝑥 + 𝜕𝑧 (𝐾𝑀 𝜕𝑧 )
(3-17b)
P a g e | 21
𝜕𝑣
𝜕
𝜕
𝜕𝑣
( 𝜕𝑡 ) = −𝑓𝑢 − 𝑔 𝜕𝑦 + 𝜕𝑧 (𝐾𝑀 𝜕𝑧 ).
(3-17c)
where
(𝑈, 𝑉) = ∫−𝐻(𝑢, 𝑣)𝑑𝑧
(3-18)
is the depth-integrated transport vector (per unit length). These
equations differ from (1-35) in that the nonlinear advective terms in
momentum equations (3-17b,c) have been dropped. (IWMO3.6e)
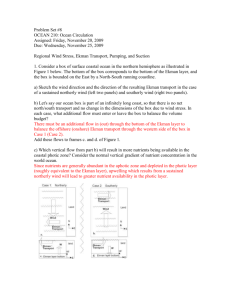
Figure 3-1. A “box” ocean circulation driven by eastward (northern half
of basin) and westward (southern half) wind stress distribution.
Depth-integrate (3-17b,c), and again drop nonlinear terms such
as u etc:
𝜕𝑈
𝜕
𝜕𝑉
𝜕
𝑥
( 𝜕𝑡 ) = +𝑓𝑉 − 𝑔𝐻 𝜕𝑥 + 𝜏𝑤
− 𝜏𝑏𝑥
𝑦
𝑦
( 𝜕𝑡 ) = −𝑓𝑈 − 𝑔𝐻 𝜕𝑦 + 𝜏𝑤 − 𝜏𝑏
(3-19a)
(3-19b)
P a g e | 22
where w and b are wind and bottom stress vectors respectively.
These equations together with equation (3-17a) constitute there
equation for three unknowns (, U, V). For our purpose, it is more
convenient to write them in terms of the depth-averaged velocity:
0
(𝑢̅, 𝑣̅ ) = ∫−𝐻(𝑢, 𝑣)𝑑𝑧/𝐷 ∫−𝐻(𝑢, 𝑣)𝑑𝑧/𝐻 = (𝑈, 𝑉)/𝐻,
(3-20)
so that (3-17a) and (3-19) become: (IWMO3.7b)
𝜕
𝜕𝑡
+
̅𝐻
𝜕𝑢
𝜕𝑥
+
𝜕𝑣̅𝐻
𝜕𝑦
=𝑄
̅
𝜕𝑢
𝜕
𝜕𝑡
𝜕𝑥
𝜕𝑣̅
𝜕
( ) = +𝑓𝑣̅ − 𝑔
(3-21a)
𝑥
+ (𝜏𝑤
− 𝑟𝑢̅)/𝐻
𝑦
( 𝜕𝑡 ) = −𝑓𝑢̅ − 𝑔 𝜕𝑦 + (𝜏𝑤 − 𝑟𝑣̅ )/𝐻
(3-21b)
(3-21c)
where r is the bottom friction coefficient with dimension m/s, we have
modeled the bottom friction as:
𝑦
(𝜏𝑏𝑥 , 𝜏𝑏 ) = 𝑟(𝑢̅, 𝑣̅ ),
(3-22)
and we have also added a source term Q to the right hand side of
(3-21a). This we will use later to model the net effect of precipitation
(𝑃̇) minus evaporation (𝐸̇ ), i.e.
Q = (𝑃̇ – 𝐸̇ )/o (unit is m/s).
(3-23)
Let H = constant, a vorticity equation similar to (3-10) may now
be derived from (3-21).
𝜕̅
𝜕𝑡
Taking the curl of (3-21b,c), we obtain:
𝜕
+ 𝑜 𝑣̅ − 𝑓 𝜕𝑡 /𝐻 = [𝑐𝑢𝑟𝑙𝑧 (𝝉𝑤 ) − 𝑄𝑓 − 𝑟̅ ]/𝐻
Apart from the terms involving Q and /t, this equation is equivalent
to (3-10). The term /t does not appear in (3-10) because it is
neglected when we derived the vertical velocity at the surface (see
(3-24a)
P a g e | 23
equation 1-67). We will explain in the next section when this term
may be deleted; assuming that it can be, then (3-24a) becomes:
𝜕̅
𝜕𝑡
+ 𝑜 𝑣̅ = [𝑐𝑢𝑟𝑙𝑧 (𝝉𝑤 ) − 𝑄𝑓 − 𝑟̅ ]/𝐻
(3-24b)
The appearance of -Qf together with curlz(w) means that as far as the
large-scale ocean circulation is concerned, effects of wind stress curl
and net precipitation minus evaporation are equivalent. The reason is
that in both cases, the ocean layer beneath the surface boundary layer
(where wind and precipitation etc act) ‘sees’ only vertical mass flux
coming in (or out) of the surface layer. In the case of wind stress curl,
this is “Ekman pumping” (Chapter 1) caused by convergence or
divergence in the surface layer, while in the case of precipitation etc, it
is more direct – due to the flux of water from the atmosphere. We will
model these effects and give a physical interpretation below. Also,
while H is the ocean depth, it may be (and for our purpose will be)
interpreted as the depth of the main thermocline in which the
̅
predominant large-scale currents reside. In that case, the friction 𝑟𝒖
is then considered as the friction at the base of the main thermocline.
Sverdrup Relation:
In the open ocean away from side boundaries, the relative
vorticity ̅ is assumed weak, in fact ̅0, and the main vorticity
balance in steady state is, from (3-24b) (omitting Q for simplicity):
𝑜 𝑣̅ 𝐻 = 𝑜 𝑉 = 𝑐𝑢𝑟𝑙𝑧 (𝝉𝑤 )
(3-25)
P a g e | 24
Figure 3-2.
A schematic to explain the equatorward Sverdrup
transport V caused by a negative wind stress curl, curlz(w) < 0.
Equation (3-25) is the Sverdrup relation; it shows that in steady motion,
a negative curlz(w) produces southward transport. Figure 3-2 explains
the physics involved. The negative curlz(w) produces convergent flow
in the thin surface (Ekman) layer (Chapter 1) and hence a downward
pumping that squashes the vortex tube in the deeper interior; this is
equivalent to a divergent subsurface flow. Squashing increases the
cross-sectional area of the tube, and if it stays at the same latitude a
negative relative vorticity (i.e. a reduced spin) would be produced, ̅ <
0. To keep the same ̅ 0, and assuming that the tube remains
approximately vertical (and it does), the tube must move south along
the curved earth surface where it can stretch and retain its initial zero
spin. The curved surface in this case is the physical equivalence of the
-effect, i.e. the Coriolis parameter f varies with latitude. Gill [1982;
p.465] gives another, equivalent explanation.
The divergent
subsurface flow beneath the negative curlz(w) increases the
cross-sectional area of the vortex tube, so the absolute vorticity (i.e. f +
) decreases. But since f >> , the only way that this decrease can be
accomplished is that the tube moves southward where f is smaller.
P a g e | 25
Figure 3-2 illustrates two other features. One is that the effect
of (positive) Q [= (𝑃̇–𝐸̇ )/o] is similar to (negative) curlz(w): this is
because Q ‘pumps’ water into the subsurface layer and again squashes
vortex tube. The other one is that while the surface is slightly elevated
( > 0) it is not important in the argument given above; in steady state,
it is in fact = 0.
If as shown in Figure 3-1 the Sverdrup transport occurs over
most portion of the ocean basin, then the total southward transport is:
𝐿
SV ∫0 𝑥 𝑐𝑢𝑟𝑙𝑧 (𝝉𝑤 )/𝑜 𝑑𝑥
Figure 3-3.
(m3 s-1).
(3-26)
Annual mean distribution of Ekman pumping, positive =
upwelling, in unit of 10-6 m s-1 (or 0.1 m/day).
Godfrey.
From Tomczak and
Figure 3-3 shows a global map of Ekman pumping – note large areas of
downwelling in the subtropical regions, suggesting equatorward
Sverdrup transports there. From (3-26), we have roughly SV
𝑥
curlz(w).Lx/o 2|𝜏𝑤
|Lx/(Lyo) (2×10-4/10-11)(Lx/Ly) m3 s-1 20 Sv
𝑥
(1 Sv = 106 m3 s-1) for Lx Ly, |𝜏𝑤
| 10-4 m2 s-2 and o 10-11 m-1s-1.
The corresponding Ekman pumping (downwelling) is from (1-64b) =
P a g e | 26
𝑥
curlz(w)/fo 2|𝜏𝑤
|/(Lyfo) 1~2×10-6 m s-1 for Ly 2000 km and fo
6×10-5 s-1, roughly equal to the values shown in Figure 3-3. This
Ekman velocity (or Figure 3-3) may be compared with contours of Q [=
(𝑃̇–𝐸̇ )/o] shown in Figure 3-4, which gives local maxima of roughly
10-7 m s-1, about 10 times weaker than the Ekman pumping.
Figure 3-4.
Annual mean distribution of precipitation minus
evaporation, Q = (𝑃̇–𝐸̇ )/o, in m yr-1 ( 3×10-8 m s-1); shaded regions
are positive.
Stommel’s Model of the Western Boundary Current (WBC):
In our idealized closed basin (Figure 3-1), the southward
Sverdrup transport must be returned northward. Since this return
cannot be in the mid-ocean (i.e. open ocean) because of the Sverdrup
constraint (as seen above), it must occur near the western and/or eastern
boundaries where the Sverdrup balance is broken. In other words,
other terms in the potential vorticity equation (3-24b), such as friction
and/or nonlinearity (which is neglected in 3-24b), become important
near the boundary. Stommel assumes that (bottom) friction is
important so that (3-24b) becomes, in steady-state:
𝜕𝑣̅
𝜕𝑥
+(
𝐻𝑜
𝑟
) 𝑣̅ = 0.
Including curlz(w) adds unnecessary complexity without adding
(3-27)
P a g e | 27
physical insight so it is omitted. Also, near the western or eastern
boundary, ̅ 𝜕𝑣̅ /𝜕𝑥. The solution is:
𝑣̅ = 𝐶(𝑦)𝑒𝑥𝑝(−𝐻𝑜 𝑥/𝑟)
(3-28)
where C(y) is an arbitrary function of y to be determined. Equation
(3-28) shows a northward jet which is maximum at the boundary (for an
eastern boundary, the “x” is replaced by “xLx”) and either decays (if
western boundary) or grow (if eastern boundary) exponentially away
from the boundary. Therefore, the northward return flow must be
along the western boundary and crucially depends on a non-zero o; the
width of this return jet may be estimated as the e-1 x-scale:
xwbc = r/(Ho)
(3-29)
This is 50 km for r 10-4 m s-1, H 200 m and o 10-11 m-1 s-1.
The C(y) is determined by requiring that the total northward transport
carried by the WBC is equal to the southward Sverdrup transport at the
∞
same latitude (i.e. same “y”). Thus, ∫0 𝑣̅ 𝐻 . 𝑑𝑥 = 𝐶(𝑦)𝑟/𝑜 = −𝑆𝑉 ,
i.e.
𝐿
𝐶(𝑦) = −𝑜 /𝑟 = ∫0 𝑥 𝑐𝑢𝑟𝑙𝑧 (𝝉𝑤 )𝑑𝑥/𝑟
𝑆𝑉
With the aforementioned values of SV 20 Sv, o 10-11 m-1 s-1 and r
10-4 m s-1, C 2 m s-1.
The Stommel WBC solution (3-28) therefore consists of a jet
concentrated against the western boundary. Since this jet has to return
northward all the Sverdrup transport across a narrow width xwbc, the
jet’s velocity is large. The Sverdrup velocity scale is, from (3-25),
𝑥
curlz(w)/(Ho) 2|𝜏𝑤
|/(HLyo) (2×10-4/10-11)/(HLy) m s-1 0.1 m
s-1 for H = 200 m and Ly = 2000 km; while the Stommel velocity scale is
C 2 m s-1. Stommel’s jet is maximum at the coast x = 0 and decays
exponentially offshore to become very weak in the ocean’s interior
where the southward Sverdrup transport prevails. Note that the
Stommel’s jet, being wholly positive, cannot join smoothly to the
(3-30)
P a g e | 28
Sverdrup flow, nor is it expected to since it is based on a frictional
equation that ignores the Ekman pumping by the wind; but this is not
important. Nor is it important that the Stommel’s jet cannot satisfy the
no-slip condition at the coast. The important thing is that: (1) beta (o)
is crucial for the existence of the western-intensified boundary current,
and (2) the WBC jet provides a mechanism that closes the ocean-basin
mass balance. (IWMO3.7e)
Munk’s Model of the Western Boundary Current (WBC):
A slightly more complicated model can be constructed to satisfy
the no-lip condition at x = 0. Instead of the bottom friction we include
horizontal viscosity terms on the RHS of the momentum equations:
𝜕
+
𝜕𝑡
̅𝐻
𝜕𝑢
𝜕𝑥
+
𝜕𝑣̅𝐻
𝜕𝑦
=𝑄
̅
𝜕𝑢
𝜕
𝜕𝑣̅
𝜕
(3-31a)
𝑥
( 𝜕𝑡 ) = +𝑓𝑣̅ − 𝑔 𝜕𝑥 + 𝜏𝑤
/𝐻 + 𝐴𝐻 𝜕 2 𝑢̅/𝜕𝑥 2
𝑦
( 𝜕𝑡 ) = −𝑓𝑢̅ − 𝑔 𝜕𝑦 + 𝜏𝑤 /𝐻 + 𝐴𝐻 𝜕 2 𝑣̅ /𝜕𝑦 2
(3-31b)
(3-31c)
where AH is the horizontal (eddy) viscosity coefficient (unit is m2 s-1),
assumed a constant. If we now take the curl etc as in the derivation of
(3-24b) we obtain:
𝜕̅
𝜕𝑡
+ 𝑜 𝑣̅ = [𝑐𝑢𝑟𝑙𝑧 (𝝉𝑤 ) − 𝑄𝑓]/𝐻 + 𝐴𝐻 2 ̅
(3-32)
Define a stream function (unit m2 s-1) such that:
𝑣̅ = 𝑥 and𝑢̅ = −𝑦
(3-33)
and therefore
= 𝜕𝑣̅ /𝜕𝑥 − 𝜕𝑢̅/𝜕𝑦 = 2
In the WBC, we now let the beta term balances the horizontal viscosity
term, equation (3-32) in steady state is then (c.f. 3-27):
(3-34)
P a g e | 29
𝐴𝐻 𝜕 4 /𝜕𝑥 4 − 𝑜 𝜕/𝜕𝑥 = 𝜕 4 /𝜕4 − 𝜕/𝜕 = 0
(3-35a)
= (o/AH)1/3x.
(3-35b)
where
Equation (3-35a) is a fourth-order ordinary differential equation (with
“y” as the ‘floating’ parameter not directly involved), and a solution of
the form exp(m) maybe assumed. Four roots are:
m1 = 0, m2 = 1, m3 = exp(i/3)=(1+i3)/2, m4 = exp(i2/3)
=(1i3)/2
(3-36)
The solution then is of the form
= C1 + C2exp(m2) + C3exp(m3) + C4exp(m4)
(3-37)
where the C’s are arbitrary function of “y” yet to be determined. The
m2 root must be deleted - by choosing C2 = 0, because it leads to a
solution which exponentially grows with (or x). The root m1 leads to
C1 – which is chosen to be C1 = I(y), where the subscript “I” denotes
“interior” (of the ocean away from the boundary) and from the interior
Sverdrup solution (3-25) with 𝑣̅𝐼 = 𝜕𝐼 /𝜕𝑥,
𝑥
𝐼 (𝑥, 𝑦) = ∫0 𝑐𝑢𝑟𝑙𝑧 ( 𝝉𝑤 )/(𝐻𝑜 )𝑑𝑥′ + 𝑜 (𝑦)
(3-38)
is the stream function of the interior’s Sverdrup flow; o(y) is an
arbitrary function. This choice is so that ~ I for ~ , since m3 and
m4 give exponentially decaying solutions for large .
Substituting m3 and m4 from (3-36) to (3-37), we obtain then:
√3
)+
2
= I + 𝑒 −/2 [C3𝑐𝑜𝑠 (
√3
)]
2
C4𝑠𝑖𝑛 (
the C3 and C4 here differ from those in (3-37) but the detail is not
(3-39)
P a g e | 30
important; they are still arbitrary functions of “y.” The corresponding
velocity components from (3-33) are:
𝑢̅ =
−𝜕𝐼
𝜕𝑦
𝜕𝐶
√3
)
2
− 𝑒 −/2 [ 𝜕𝑦3 𝑐𝑜𝑠 (
−𝐶3
𝑣̅ = 𝑒 −/2 [(
2
+
+
√3𝐶4
√3
) 𝑐𝑜𝑠 ( 2 )
2
𝜕𝐶4
𝜕𝑦
√3
)]
2
𝑠𝑖𝑛 (
√3𝐶3
2
−(
+
𝐶4
2
(3-40a)
√3
)]
2
) 𝑠𝑖𝑛 (
(3-40b)
The conditions that there can be no normal flow (𝑢̅ = 0) and no slip
(𝑣̅ = 0) at = 0 give:
C3 = I(0,y) + K, where K = constant, and
(3-41a)
𝐶4 = 𝐶3 /√3.
(3-41b)
Therefore, (3-39) gives:
= I(x, y) I(0,y)𝑒 −/2[𝑐𝑜𝑠 (
+ K𝑒 −/2[𝑐𝑜𝑠 (
1
√3
√3
)+ 𝑠𝑖𝑛 ( 2 )]
2
√3
1
√3
√3
)+ 𝑠𝑖𝑛 ( 2 )]
2
√3
(3-42)
From equation (3-35b), we note that (AH/o)1/3 has the unit of length (m).
Its value is 100 km (for AH = 103 m2 s-1 and o 10 -11 m-1 s-1) which is
thin compared to the width of the basin 2000 km (say); it is the
e-folding decay scale of the western boundary current near x 0. We
are therefore making only a small error if I(0,y) in (3-42) is replaced
by I(x,y). Another way of saying the same thing is that, since I
varies over a large scale >> (AH/o)1/3, I(x, y) I(0,y) near the
western boundary. To determine K, we note that, since our basin is
closed, the stream function around the boundary is zero. Therefore,
for to be also = 0 at x = 0, (3-42) shows that K must also = 0.
Therefore, (3-42) becomes:
1
√3
√3
)+
𝑠𝑖𝑛
(
)]}
2
2
√3
= I(x, y) {1 𝑒 −/2 [𝑐𝑜𝑠 (
(3-43)
P a g e | 31
The northward velocity is /x:
1
𝑣̅ = (𝑜 /𝐴𝐻 )3 𝐼 (0, y)
2
√3
√3
) 𝑒 −/2 ,
2
𝑠𝑖𝑛 (
= (o/AH)1/3x,
(3-44)
in which we have neglected the interior velocity contribution I/x,
which is much smaller. Note that the jet form is again apparent by the
exponential decay term. But in contrast to the Stommel’s solution
equation (3-28), because of the sine function, the northward velocity is
zero at x = 0. Also because of the sine function the velocity becomes
slightly negative (i.e. reversed flow) at the offshore edge of the jet.
Class: estimate the magnitude of 𝑣̅ from (3-44).
3-3: The Equivalent Reduced-Gravity Model
In this section non-dimensional variables will be denoted by
subscripts “n.” The above model has one layer and involves the free
surface . We now show that with slight reinterpretations of the
variables, the equations of that model are exactly the same as those
governing the motion of a two-layer ocean in which one of the layers is
infinitely thick and is quiescent. Before we do this, we find out first
the condition when the term involving /t in equation (3-24a) may be
neglected. This is necessary in order to understand the restrictions on
the spatial and temporal scales under which the resulting equation(s)
apply. Instead of (3-24a), we will non-dimensionalize the vorticity
equation that uses the horizontal viscosity instead of the bottom friction,
i.e. we use (3-32) with f(/t)/H retained:
𝜕̅
𝜕𝑡
+ 𝑜 𝑣̅ − 𝑓
𝜕
𝜕𝑡
/𝐻 = [𝑐𝑢𝑟𝑙𝑧 (𝝉𝑤 ) − 𝑄𝑓]/𝐻 + 𝐴𝐻 2 ̅
Define the following non-dimensional variables:
𝑈
𝑈
𝑓𝑈𝐿
̅ = ̅ 𝑛 ( 𝐿 ) , 𝑜 = 𝑜𝑛 (𝐿2 ) , 𝑣̅ = 𝑣̅𝑛 𝑈, = 𝑛 ( 𝑔 ) , 𝑡 =
𝐿
𝑡𝑛 (𝑈),
(3-45)
P a g e | 32
w = wno,
Q = Qn Qo,
AH = AHn AHo.
(3-46)
Note that the scale for , i.e. fUL/g, is determined from balancing the
pressure gradient and Coriolis terms in equation (3-31b,c). Substitute
(3-46) into (3-45):
𝜕̅ 𝑛
𝜕𝑡𝑛
𝐿2
𝜕
𝐿
𝐿2 𝑓𝑄
+ 𝑜𝑛 𝑣̅𝑛 − (𝑅2 ) 𝜕𝑡 𝑛 = [(𝐻𝑈𝑜2 ) 𝑐𝑢𝑟𝑙𝑧𝑛 (𝝉𝑤𝑛 ) − ( 𝐻𝑈 2𝑜 ) 𝑄𝑛 ] +
𝑛
𝐴
𝐻𝑜
( 𝑈𝐿
) 𝐴𝐻𝑛 2n ̅𝑛
where R = (gH)1/2/f
(3-47
is the Rossby radius of deformation. We see that
dropping the term involving n/tn amounts to saying that R >> L, i.e.
the spatial scale of motion is much smaller than the Rossby radius.
For H 1000 m and f 6×10-5 s-1, R 1500 km, so that motions with
scales smaller than about 1000 km will not be much affected by the
production of vorticity due to stretching associated with the motion of
the free-surface. This kind of motion is called a barotropic motion.
On the other hand, as we will now show, R can be quite small for the
reduced-gravity model, in which case the stretching term becomes
important.
P a g e | 33
Chapter 4: Two-layer approximation
4.1 2-layer equations
4.2 pressure compensation
4.3 reduced-gravity equivalence
P a g e | 34
Approximate ocean as 2-layer:
Vertical sections of density σθ in the western Atlantic. From Lynn and
Reid (1968).
Profile of in situ and potential temperature in the Kermadec Trench in
the Pacific on 13 July 1967 at 175.825°E and 28.258°S. Data from Warren
(1973)
P a g e | 35
Conservation of volume:
𝜕ℎ𝑖
𝜕𝑡
+
𝜕𝑢𝑖 ℎ𝑖
𝜕𝑥
+
𝜕𝑣𝑖 ℎ𝑖
𝜕𝑦
= 0, i = 1, 2.
(4.1)
Pressure in layer 1, 1 z H1+2,
p1(x,y,z,t) = pa(x,y,t) + g1(1 z)
(4.2)
Pressure in layer 2, H1+2 z (H1+H2),
p2(x,y,z,t) = p1(z =H1+2) + g2(H1 + 2 z) (4.3)
Pressure gradients, e.g. /x:
p1/x = pa/x + g11/x, in layer 1;
(4.4)
p2/x = p1/x + g(1h1)/x, in layer 2, (4.5)
P a g e | 36
where = (2 1), and (4.2) was used for p1(at z
=H1+2), also 2 = H1 + 1 h1 (see Figure).
𝜕ℎ1
+
𝜕𝑡
𝐷𝑢1
𝜕𝑢1 ℎ1
𝜕𝑥
+
𝜕𝑣1 ℎ1
𝜕𝑦
=0
1 𝜕𝑝𝑎
( 𝐷𝑡 ) = +𝑓𝑣1 − 𝜌
𝜕𝑥
1 𝜕𝑝𝑎
𝑜
𝐷𝑣
( 𝐷𝑡1 ) = −𝑓𝑢1 − 𝜌
𝜕𝑦
𝑜
𝜕ℎ2
+
𝜕𝑡
𝐷𝑢2
𝜕𝑢2 ℎ2
𝜕𝑥
+
𝜕𝑣2 ℎ2
𝜕𝑦
− 𝑔
− 𝑔
𝜕1
𝜕𝑥
𝜕1
𝜕𝑦
𝑥
+ 𝜏𝑤
/𝐻
(4.5b)
𝑦
+ 𝜏𝑤 /𝐻
(4.5c)
=0
1 𝜕𝑝𝑎
( 𝐷𝑡 ) = +𝑓𝑣2 − 𝜌
𝜕𝑥
1 𝜕𝑝𝑎
𝑜
𝐷𝑣
(4.5a)
( 𝐷𝑡2 ) = −𝑓𝑢2 − 𝜌
𝜕𝑦
𝑜
(4.6a)
− 𝑔
− 𝑔
𝜕1
𝜕𝑥
𝜕1
𝜕𝑦
−
−
𝑔𝜌 𝜕(1 −ℎ1 )
𝜌𝑜
𝜕𝑥
𝑔𝜌 𝜕(1 −ℎ1 )
𝜌𝑜
𝜕𝑦
(4.6b)
(4.6c)
Pressure Compensation
Deep layer-2 currents are often weak, so that (4.6b,c)
can be integrated:
1 + C = (
or 1 = (
choosing C = (.
Where 1 convexes
upwards, 1 > 0, the isopycnal concaves downward,
2 < 0.
Reduced-gravity equation:
𝜕ℎ1
+
𝜕𝑡
𝐷𝑢1
𝜕𝑢1 ℎ1
𝜕𝑥
+
𝜕𝑣1 ℎ1
=0
𝜕𝑦
𝑔𝜌 𝜕ℎ1
( 𝐷𝑡 ) = +𝑓𝑣1 −
𝜌𝑜 𝜕𝑥
(4.7a)
𝑥
+ 𝜏𝑤
/𝐻
(4.7b)
P a g e | 37
𝐷𝑣
( 𝐷𝑡1 ) = −𝑓𝑢1 −
(4.7c)
𝑔𝜌 𝜕ℎ1
𝜌𝑜 𝜕𝑦
𝑦
+ 𝜏𝑤 /𝐻
P a g e | 38
Lecture 2: Basic numerical techniques (IWMO3.1beg)
Finite-difference (FD) grid & approximation
u = u(x), 0xL uj = uj(jx), j=1,2, …, J+1
so that
(L2.1)
x = L/J.
Infinite-term Fourier expansion:
u = ao/2 + 1(an cos 2n x/L + bn sin 2n x/L), n1.
(L2.2)
Note that all wavelengths are represented: L, L/2, L/3,…, L/.
But with J+1 values of uj on the grid, we can at best compute
ao, a1, a2, …, aJ/2, b1, b2, …, bJ/2,
(L2.3)
The component with the shortest wavelength has n=J/2:
L/(J/2) = 2L/(L/x) = 2x
(L2.4)
Approximating derivatives:
(du/dx)j (uj+1 uj)/x
(L2.5)
Accuracy:
Substitute the true solution u(jx) into the RHS of (L2.5), and
Taylor-expand:
(uj+1 uj)/x (du/dx)j + (d2u/dx2)jx/2! + (d3u/dx3)j(x)2/3! + …
True
…..…… Truncation Error ………
= O(x) = (d2u/dx2)jx/2! + (d3u/dx3)j(x)2/3! + …
(L2.6)
We then say that the order of accuracy of the finite-difference (FD)
approximation (L2.5) is “x,” or O(x).
P a g e | 39
Consistency:
To be consistent, the FD approximation of the derivative (e.g. L2.5) must
approach the true derivative, i.e. ~ 0 as x 0.
Clearly, (L2.5) is a consistent approximation to du/dx.
Finite difference schemes
The algebraic equation obtained when derivatives in a differential
equation are replaced by FD approximation is called a finite difference
approximation to that differential equation, or a finite difference scheme.
Linear advection equation:
u/t + c u/x = 0, u = u(x,t), c = positive constant
General solution is: u = f(x-ct), f = arbitrary function
(L2.7)
(L2.8)
The “f” is determined by initial condition; for example, if
u(x,0) = F(x),
then
u = F(xct) is the solution
(L2.9)
Fig.L.1 One of the characteristics x-ct=constant of (L2.7).
As time marches forward, the true solution depends on its value “to the
left” or “upstream”. This suggests the following FD scheme:
(ujn+1 ujn)/t + c (ujn uj-1n)/x = 0
Forward
Upstream
(L2.10)
The truncation error is then obtained by substituting the true “u”:
P a g e | 40
=
[u (jx, (n+1)t) u (jx, nt)]/t
+ c [u (jx, nt) u ((j-1)x, nt)]/x
+
(L2.11)
= (2u/t2)t/2 + (3u/t3)t2/3! + …
c [(2u/x2)x/2 (3u/x3)x2/3! + …]
= O (x, t).
Consistency of the FD scheme:
As x and t 0, the above FD scheme (L2.10) is said to be consistent
since it then becomes closer and closer to the actual differential equation
(L2.7).
Convergence:
A FD solution is said to be convergent if for a fixed total time, ujn
u(jx,nt) as x and t 0.
A FD scheme is said to be convergent if it gives a convergent solution for
any initial conditions.
A consistent FD scheme does not necessarily mean that its solution
approaches the true solution (see Fig.L.2).
Fig.L.2 An example of a consistent FD scheme (L2.10) which does not
yield a convergent solution.
In Fig.L.2, solid line is the true-solution characteristic passing through the
origin (0,0) and the square grid point
where/when the approximate FD
solution ( u(0,0)) is desired. The slope of the characteristic is dt/dx =
1/c. On the other hand, using (L2.10), the FD-solution at
depends
P a g e | 41
only on those circle
grid points. The region defined by the circle
grid points is called the domain of dependence of the FD scheme. As
we refine x and t keeping their ratio the same as that shown by the grid
rectangles, the FD-solution at
may be arbitrarily different from u(0,0).
For the FD solution to “know” the u(0,0) value, it is clear that the FD’s
domain of dependence must include the origin, i.e. the ratio t/x must
be chosen such that it is less than the slope of the solution characteristic
“1/c”:
t/x 1/c,
or
ct/x 1
(L2.12)
In Fig.L2, this can be accomplished by halving the t while keeping the
x the same. We note that for the special case when t and x are
chosen such that ct/x = 1, the FD-solution at
will be exactly equal
to the true solution = u(0,0). This is also seen in (L2.10) which then
gives uin+1 = ui-1n = ui-2n-1 = … etc.
Condition (L2.12) is a necessary condition for convergence of the FD
scheme (L2.10). (Necessary because if we violate the condition, then we
know for sure that the solution will not converge. In other words,
making sure that the domain of dependence of the FD include the solution
characteristic cannot guarantee that the FD-solution converges).
Stability:
What is the behavior of the FD-solution as time-stepping proceed?
Assuming that the true solution is bounded, then a FD-solution ujn is
stable if its error |ujn u(jx,nt)| remains bounded as “n” increases, for
fixed values of t and x.
A FD-scheme is stable if its solution is stable for any initial conditions.
To guarantee that a FD-scheme is stable, we will derive the condition that
ensures that the maximum absolute magnitude of the FD solution at a
particular time-level “n+1” (say) is less than the corresponding maximum
absolute magnitude at the previous time step “n.” This condition will
then be a sufficient condition (but obviously may not be necessary).
P a g e | 42
We again take the FD-scheme (L2.10) as an example, and find the
sufficient stability condition. Eqn. (L2.10) can be written as:
ujn+1 = (1-) ujn + uj-1n,
= ct/x > 0
(L2.13)
Direct method:
If the coefficients of ujn and uj-1n are positive, i.e. if
= ct/x 1, and > 0
then
(L2.14)
|(1-) ujn + uj-1n| (1-) |ujn| + |uj-1n|.
Therefore, taking absolute maximum over all j’s of both sides of (L2.13):
Maxj | ujn+1| (1-) Maxj |ujn| + Maxj |uj-1n| Maxj |ujn|
which proves the solution remains bounded with time-stepping. The
condition (L2.14) is therefore a sufficient condition for stability of the FD
scheme (L2.10). Note that this same condition happens to be also the
necessary condition for convergence.
Energy method:
By squaring both sides of (L2.13) and summing over all j’s, the same
condition (L2.14), coupled with x-periodic boundary condition, can be
shown to also lead to (after some algebra):
j(ujn+1)2 j(ujn)2
i.e. each and every value of ujn must also be bounded with time-stepping.
von Neumann (Fourier) method:
This method borrows the idea from the analytical method of applying a
single Fourier harmonic mode to (L2.7) by the separation of variables:
P a g e | 43
u (x,t) = Re {U(t) eikx }
(L2.15)
so that (L2.7) becomes:
dU/dt = ikcU U(t) = U(0) e-ikct
and the solution is then:
u (x,t) = Re {U(0) eik(x-ct)}
(L2.16)
This shows that each harmonic component (with wavenumber k) is
advected at the constant speed “c” with unchanging amplitude.
For the FD-scheme (L2.13), we apply the same idea and assume a
solution of the form:
ujn = Re {U(n) eikjx}
(L2.17)
where U(n) is the amplitude of the FD-solution at time level “n.”
Substitute into (L2.13):
U(n+1)/ U(n) = (1 ) + e-ikx
(L2.18)
where || is the amplification factor. Therefore, for the solution to be
bounded with time-stepping, we require that || 1. Evaluating ||:
|| = 1 + 2 (1 ) [1 + cos(kx)]
(L2.19)
It is clear that for || to be 1:
2 (1 ) [1 + cos(kx)] 0
which can only be satisfied for all k’s if:
= ct/x 1
(L2.14)
which is again the same stability condition (L2.14). This condition is
commonly known as the CFL or Courant-Friedich-Levy stability
condition, named in honor of the authors who first derived it.
P a g e | 44
An implicit scheme for the diffusion equation
The CFL condition can place an extremely strict (i.e. very small) upper
limit for the size of the time step t especially when the spatial grid size
(e.g. x) is very small. This is the case in the ocean and atmosphere for
the vertical direction because the layer is very thin (~10km) compared to
horizontal distances ~ 1000 km. So when finite-differencing in the
z-direction, the z can be very small. Implicit scheme removes the
restriction on t imposed by the smallness of x.
Consider
u/t = 2u/x2
(L2.20)
and we approximate it using the following implicit scheme:
(ujn+1 ujn)/t = (uj+1n+1 2 ujn+1 + uj-1n+1)/x2
(L2.21)
Then using the von Neumann analysis, we get:
|imp| = 1/[1 + 2 (1 cos(kx))], where = t/x2
Clearly, |imp| 1 always regardless of the values of t and/or x. For
this reason, implicit scheme is used in ocean and atmospheric models
especially when approximating the z-direction.
Boundary conditions
Closed (e.g. at the coast) and ocean’s bottom and surface boundary
conditions are fairly straight-forward. The trickiest boundaries to treat
are “open” boundaries. I have written a set of notes for their treatments,
and you may download them from:
http://www.aos.princeton.edu/WWWPUBLIC/PROFS/PUBLICATION/O
FES20101104.pdf (IWMO3.1end)
A detailed 2-way nesting report can be downloaded from:
http://www.aos.princeton.edu/WWWPUBLIC/PROFS/PUBLICATION/O
eyAccuracyOfNestedGridOceanModel1996.pdf
P a g e | 45
Lecture 3: The Princeton Ocean Model & GFD
Experiments
http://www.aos.princeton.edu/WWWPUBLIC/htdocs.pom/in
dex.html
L3.1 POM08/2k and recent MPI implementations by Toni Jordi
L3.2 Model equations
L3.3 The numerical scheme
L3.4 Idealized experiments
POM User Guide:
http://www.aos.princeton.edu/WWWPUBLIC/htdocs.pom/PubOnLine/P
OL.html
P a g e | 46
P a g e | 47
L3.4: Idealized Experiments
(a) 1-D step and block-propagation problems;
(b) Taylor column;
(c) Surface and bottom Ekman layers;
(d) Western Boundary Current – Stommel & Munk;
(e) Estuarine plume debouching onto a continental shelf;
(f) Estuarine plume with tide;
(g) Baroclinic waves and eddies;
(h) Wetting & Drying.
Pls. download codes, runscripts, inputs and outputs etc
from:
ftp://aden.princeton.edu/pub/lyo/iwmo3/training-class/
for parallel mpiPOM/sbPOM versions; and from:
ftp://aden.princeton.edu/pub/lyo/pom_gfdex/wmo09trainin
g/anIntroCourseNumOceanExpsUsingPOM/
for POM08/POM2k versions.
2-6: Heuristic derivation of the quasigeostrophic (QG) potential vorticity (PV)
equation for a stratified fluid
P a g e | 48
The inviscid x, y & z-momentum and continuity equations are:
u/t + uu/x + vu/y + wu/z -fv = -r-1(p/x)
v/t + uv/x + vv/y + wv/z +fu = -r-1(p/y)
p/z = -g
u/x + v/y + w/z = 0
(2-6.1a)
(2-6.1b)
(2-6.1c)
(2-6.1d)
Also, a beta-plane is assumed such that:
f = fo + oy
(2-6.2)
where fo is the Coriolis parameter at y=0 (around where later we will develop the
instability analysis), o = df/dy, and it is also assumed that |oy| << |fo|.
For o
10 m s , and |fo| 5×10 s or larger (poleward of 20 N/S), we restrict |y| 1000
km or less.
-11
-1 -1
-5 -1
o
The symbols have the usual meanings, and r = reference density which is a function
of z only. The basic QG-approximation idea is that the motions are close to being
geostrophic, so we will use the geostrophic velocity assuming constant f fo (which is
‘zeroth-order’) to evaluate the “difficult” terms which in (2-6.1a,b) are the non-linear
and “o” terms.
To the zeroth-order approximation, the motions are nearly geostrophic, so that:
-fovo = -r-1(po/x)
+fouo = -r-1(po/y)
(2-6.3a,b)
uo/x + vo/y = -wo/z 0
(2-6.4)
so that
Therefore, wo 0 since it is 0 at the surface. In any case, the zeroth-order or
geostrophic approximation of w = wo is small compared to |uo| or |vo|.1
1
Typically, w = Ekman pumping near the surface ×o/(fo)
0.1(N/m2)/[104(m).10-4(s-1).103(kg/m3)] 10-4 m/s 10 m/day, for a strong wind stress curl of 0.1 N/m2
over a distance of 10 km.
Thus comparing to typical |uo| 5×10-2 m/s, the “w” is indeed small.
the open ocean, the “w” is typically smaller than 10 m/day.
In
P a g e | 49
Substitute the (uo, vo, wo0) into the non-linear and beta parts of (2-6.1), we then can
get the following equations for the next-order term with subscripts “1” (u1, v1, p1):
do/dt{uo} – fov1 oyvo = -r-1(p1/x)
do/dt{vo} + fou1 + oyuo = -r-1(p1/y)
(2-6.5a)
(2-6.5b)
do/dt = /t + uo/x + vo/y.
(2-6.6)
where
Taking the (z-component of the) curl of (2-6.5) to eliminate the pressure, and using
the first of (2-6.4) that uo/x + vo/y 0, we get:
do/dt{o} + ovo + fo.u1 = 0, or
do/dt{o + oy} = fow1/z
(2-6.7)
after using (2-6.6) and (2-6.1d), i.e. u1/x + v1/y + w1/z = 0.
By vertically integrating (from z=-H to z=0) equation (2-6.7) we recover the QGPV
equation for homogeneous fluid ( = constant), which we studied previously in
section 2-1 (see equation (2.10)). For stratified fluid, we need to evaluate w1/z
using the density (or buoyancy b = -g/r) equation [see section 11.1.1 of Marshall
and Plumb, 2008] which without heat/salt sources and sinks on the RHS is:
/t + u/x + v/y + w/z = 0
(2-6.8)
The density is given by:
= r(z) + ’(x,y,z,t)
(2-6.9)
and the hydrostatic equation is then assumed also for the perturbation density ’ (and
pressure po):
or
po/z = -g’ (also of course pr/z = -gr)
(2-6.10a)
(po/z)/r = -g’/r = b’
(2-6.10b)
P a g e | 50
Using the QG-approximation on (2-6.8), we get:
do/dt{’} + w1(dr/dz) = 0,
(2-6.11a)
or multiplying by –g/r, we get do/dt{-g’/r} + w1(-gdr/dz)/r = 0, i.e.
do/dt{b’} + w1N2(z) = 0
(2-6.11b)
where N2(z) = (-gdr/dz)/r is the squared buoyancy (or Brunt-Vaisala) frequency.
We see that (in the absence of sources and sinks) the vertical velocity w1 is related to
the isopycnal movement due to the geostrophic flow:
w1 = do/dt{b’/N2(z)}
(2-6.11c)
We can now use w1 in (2-6.7):
do/dt{o + oy} = fow1/z = fodo/dt{[b’/N2(z)]/z}
or upon using the hydrostatic equation (2-6.10b):
do/dt{o + oy} = fodo/dt{[(po/z)/(rN2)]/z}
i.e.,
do/dt{o + oy + fo[(po/z)/(rN2)]/z} = 0
(2-6.12a)
or,
do/dt{(2po)/(for) + oy + fo[(po/z)/(rN2)]/z} = 0
(2-6.12b)
since from (2-6.3a,b), we have for the geostrophic vorticity:
o = vo/xuo/y = 2po/(for)
(2-6.13)
For the ocean, r can be assumed to be constant in (2-6.12b), so that equation
becomes:
do/dt{2(po/for) + oy + [(po/for)/z)(fo/N2)]/z} = 0
From the geostrophic relation (2-6.3), the po/(for) is equivalent to geostrophic stream
function:
(2-6.14)
P a g e | 51
= po/(fo r)
(2-6.15)
so that (2-6.14) is usually expressed in terms of :
do/dt{2 + oy + [(/z)(fo/N2)]/z} = 0
(2-6.16a)
The quantity inside the {..} is the QGPV for a stratified fluid:
Q = 2 + oy + [(/z)(fo/N2)]/z
(2-6.16b)
Non-dimensionalization:
We use the following scales:
Table 2-6.1
Scales
Variables
So that… (primes denote nondimensional variables)
L
(x,y)
(x,y) = L (x’,y’)
D
z
z = Dz’
U
(u,v)
(u,v) = U(u’,v’)
L/U
t
t = (L/U)t’
fo rUL
po
po = fo rULpo’, using geostrophic eqn.(2-6.3)
UL
= UL’, using eqn. (2-6.15)
Ns
N
N = NsN’, for some typical Ns value of N
Then the non-dimensionalized form of (2-6.16) is (dropping all primes):
and
do/dt{2 + y + [S-1(/z)]/z} = 0
(2-6.17a)
Q = 2 + y + [S-1(/z)]/z
(2-6.17b)
where = oL2/U, S = (LD/L)2, and LD = NsD/fo is the baroclinic Rossby radius based
on ocean’s depth D. Note that Ns2D ~ g/r ~ g’, the reduced gravity, so that Ns2D
~ g’D ~ baroclinic phase speed squared. The nondimensional = o/[(U/L)/L] =
o/(o/L) is a measure of the ratio of gradient of planetary vorticity “o” to the
gradient of flow vorticity “o/L”. By assuming that ~ O(1) in (2-6.17), we are
examining an important GFD case in which the planetary vorticity gradient
contributes equally with the relative vorticity gradient to the overall vorticity balance.
P a g e | 52
If the scale of motion is small compared to the Rossby radius, L << LD so that S >> 1,
the effect of vortex-tube stretching to the PV-balance (i.e. the [S-1(/z)]/z term) is
small, and the flow’s relative vorticity (i.e. 2) becomes important. If on the other
hand the scale of motion is large, L >> LD, then S << 1, and the flow’s vorticity
becomes relatively unimportant, i.e. the flow looks horizontally more uniform.
2-7: Baroclinic instability
Fig.2-7.1 suggests that baroclinic instability may occur along special paths “(iii)”
across slanting isopycnals which of course imply the existence of vertical velocity
shear by the thermal-wind equations (from geostrophic eqn.(2-6.3a,b) and hydrostatic
eqn.(2-6.10b)):
or
k × fo uo/z = b’
(2-7.1a)
fo uo/z = k × b’
(2-7.1b)
We will now find the condition – what type of vertical shears can produce baroclinic
instability? Or, in general, what type of vertical and horizontal shears can produce
baroclinic and barotropic instabilities?
We will use the non-dimensionalized QGPV
equation (2-6.17) so that all variables are from here on non-dimensional.
Dimensional variables will have subscript “*”. Consider an initial or background
state of purely zonal flow Uo(y,z) with stream function (y,z):
Uo(y,z) = /y (note that Vo = /x = 0)
(2-7.2)
Introduce perturbation “”, so that the total, time-dependent stream function is:
(x,y,z,t) = (y,z) + (x,y,z,t)
(2-7.3)
P a g e | 53
Fig.2-7.1. Schematized diagrams showing various scenarios when exchange of fluid
parcels “A” and “B” along the blue path line either leads to increased potential energy
so that the mass center of the system moves up (stable), is unchanged (neutral) or to
decreased potential energy so that the mass center of the system moves down (maybe
unstable). It is easy to see that only for the special path within the “wedge” formed by
the isopycnal (red line) and the horizon (dashed line) in “(iii)” can the exchange
possibly lead to instability (such that after the exchange the two parcels move away
from each other). Such an instability is called baroclinic instability.
The function is perturbation to the initial state ; it represents the structure of the
evolving perturbation field. Substitute (2-7.3) into (2-6.17):
(/t + Uo/x y/x + x/y){q + 2/y2 + y + [S-1/z]/z}
=0
or
(/t + Uo/x)q + J(,q) + x/y = 0
(2-7.4)
where q(x,y,z,t) is the perturbation PV:
q = 2 + [S-1(/z)]/z
(2-7.5a)
P a g e | 54
and
o = 2/y2 + y + [S-1/z]/z
(2-7.5b)
is the background or initial state’s PV, and its meridional gradient is (using
eqn(2-7.2)):
o/y = 2Uo/y2 + [S-1Uo/z]/z
(2-7.5c)
Notice how the thermal-wind relation leads to the vertical shear Uo/z that then
appears in this last equation for o/y.
How does the structure of Uo(y,z) determine the evolution of the perturbation field ?
That is, given a particular background or initial state Uo(y,z), will the perturbation
“injected” on the flow grows or decays? If grow, then the initial state is unstable
with respect to the perturbation . To show that Uo is stable, we must check all
possible ’s. On the other hand, to show instability, we only need to find one
perturbation to which the initial state Uo is unstable.
Linear Stability Analysis:
We assume that || << 1 so that the J(,q) in (2-7.4) is dropped:
(/t + Uo/x)q + x/y = 0
(2-7.6)
The boundary conditions are that vertical velocity w* = wo* + w1* + O(2) is zero at
z=0 (surface) and z=-1 (ocean’s bottom). Here = U/(foL) is the Rossby number
which is assumed to be small, and we already noted previously (see eqn.(2-6.4) and
discussion) that wo* = 0, so that w* w1* The non-dimensional w1 can then be
expressed in terms of using equations (2-6.11c), the hydrostatic relation (2-6.10b),
and (2-6.15) which gives:
and
b*’ = fo*/z*, hence w1* = do*/dt{fo*/z*/N2}
(2-7.7a,b)
w1 = do/dt{S-1/z} = 0 at z=0 & -1.
(2-7.8)
A perturbation energy equation can be derived and it can be shown that:
s (o/y)(<2>/t) dydz = 0
(2-7.9)
P a g e | 55
where is the meridional displacement of fluid elements defined by:
/t + Uo/x = /x
and <.> is a zonal-averaging. From (2-7.9), we see that if there is to be a growth in
the displacement of fluid elements in time, i.e. if <2>/t > 0, then o/y must be
somewhere positive and somewhere else negative in the yz-plane, or o/y can also
be identically zero everywhere. In other words, o/y must vanish on a line in the
yz-plane. Clearly, this condition (i.e. that o/y must vanish somewhere) is not
sufficient.
(2-7.10)
P a g e | 56