Some Mathematical Preliminaries
advertisement

Chapter 9
Mathematical
Preliminaries
Stirling’s Approximation
n
~
n!
e
n
n
n
2n
log n! log k . Let I log xdx ( x log x x) 1 n log n n 1
n
k 1
1
Fig.
by trapezoid rule
9.2-1
I
1
1
log 1 log 2 log( n 1) log n
2
2
....
1
n log n n log n 1 log n! n n e n n e n!
2
take
antilogs
1
1
Fig.
by midpoint formula I log 2 log 3 log( n 1) log n
9.2-2
8
2
7
1 1
n n
n log n n 1 log n log n! n e
n e 8 n!
8 2
n! n e
n n
take
antilogs
7
8
n C where 2.4 e C e 2.7
9.2
Binomial Bounds
Show the volume of a sphere of radius λn in the n-dimensional unit hypercube is:
n n
n
V (n) 1 2nH 2 ( )
1 2
n
Assuming 0 λ ½ (since the terms are reflected about n/2) the terms grow
monotonically, and bounding the last by Stirling gives:
n
n!
n ne n n C
n n
n n n n
n C (n n ) e
n n C
n (n )!(n n )! (n ) e
nn
1
en
C 1 n
n n n n n n (1 )(1 ) n e ne ( n n )
n (1 )n
1
n
1
1
C 2
nH 2 ( ) C
for some C '
(1 )1 (1 )n 2
n
log (1 )1 log (1 ) log( 1 ) H ( ).
9.3
n n
n
1 termwise by a geometric series
bound
n n 1
1
n
n 1
3
2
1
with ratios
(the
1 n n 1 n n 2 k n 2 n 1 n
1
1
actual ratios between te rms). So
,
1 2
k 0 1 -
1
1
k
n n
C
C 1
nH 2 ( )
nH 2 ( )
nH 2 ( )
2
2
2
k
2
n k 0 1
1
k 0
n
1 as n
n
2
N.b.
n
n ~ n 1
n
nH 2 1
n
2
2 2
2
k 0 k
k 0 k
9.3
The Gamma Function
Idea: extend the factorial to non-integral arguments.
by convention
Let (n) e x x n1dx.
0
For n > 1, integrate by parts: dg = e−xdx f = xn−1
( n) x
n 1
x
e
(n 1) e x x n 2 dx
1 0
0
(n) (n 1)(n 1) (1) e dx e
x
x
0
1
0
(2) 1
(3) 2!
(4) 3! (n) (n 1)!
9.4
xt 2
1
x
e x dx
2 0
1
2
2 e dt e dt
t
2
t 2
e
t 2
0
1
2tdt
t
(called the error integral)
0
1 1
x
y
x2 y2
e dx e dy e
dxdy
2 2
2
dr
rdθ
r
dx
dy
area = dxdy
2
2
r 2
e
e rdr d 2
2
00
r 2
0
area = rdrdθ
1
2
9.4
N – Dimensional Euclidean Space
Use Pythagorean distance to define spheres:
x12 xn2 r
Consequently, their volume depends proportionally on rn
4
n
Vn (r ) Cn r
C1 2 C2 C3
3
n
n
t 2
1
xi2
e dt e dxi
i 1
2
n
n
2
e
x12
x n2
dx dx e r dVn (r ) dr C e r nr n 1dr
1
n
n
2
0
2
dr
0
converting to polar coordinates
9.5
r2 t
dr
n
nC
t
t 2 1
n
n Cn e t t dt
e t dt
2 0
0
n
n n
n
Cn Cn 1
1
2 2
2
2
n 1
2
n
2
1
2
1
2
2
Cn
Cn 2
n n
1
2
just verify
by substitution
Cn
2
2.00000
π
3.14159
3
4π/3
4.18879
4
π2/2
4.93420
5
8π2/15
5.26379
6
π3/6
5.16771
7
16π3/105
4.72477
8
π4/24
4.05871
…
…
2k
πk/k!
…
→0
From table on page 177 of book.
9.5
Interesting Facts about
N-dimensional Euclidean Space
Cn → 0 as
Vn(r) → 0 as
n→∞
n→∞
for a fixed r
Volume approaches 0 as the dimension increases!
Vn (r ) Cn r Cn (r )
1 1
1
n
Vn (r )
Cn r
r
as n
n
n
n
Almost all the volume is near the surface (as n → ∞)
end of 9.5
Angle between the vector (1, 1, …, 1) and each coordinate axis:
1
cos
n
length of projection
along axis
As n → ∞: cos θ → 0,
θ → π/2.
length of entire vector
For large n, the diagonal line is almost perpendicular to each axis!
x
y
By
cos
x y
definition:
What about the angle between
random vectors, x and y, of the
form (±1, ±1, …, ±1)?
n
n
uniform
for uniformly
(
1
)(
1
)
(
1
)
random
products
distributed
random vectors
k 1
k 1
0
n
n n
Hence, for large n, there are almost 2n random diagonal
lines which are almost perpendicular to each other!
end of 9.8
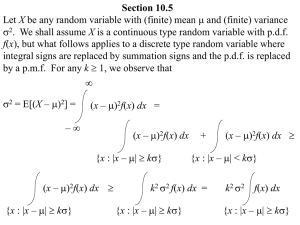
Chebyshev’s Inequality
Let X be a discrete or continuous random variable with
p(xi) = the probability that X = xi. The mean square is
x2 × p(x) ≥ 0
x p( x ) x p( x )dx
E X
2
i
2
i
2
i
x
p
(
x
)
dx
2
2
x
p
(
x
)
dx
P
|
X
|
2
x
P | X |
E X2
2
Chebyshev’s
inequality
9.7
Variance
The variance of X is the mean square about the mean
value of X,
EX
x p( x)dx a
So variance, (via linearity) is:
V X E ( X a) 2 E X 2 2a EX a 2
a
2
2
2
2
2
E X a E X E X .
Note: V{1} = 0 → V{c} = 0 & V{cX} = c²V{X}
Also: V{X − b} = V{X}
9.7
The Law of Large Numbers
Let X and Y be independent random variables, with
E{X} = a, E{Y} = b, V{X} = σ2, V{Y} = τ2.
because of independence
Then E{(X − a) ∙ (Y − b)} = E{X − a} ∙ E{Y − b} = 0 ∙ 0 = 0
And V{X + Y} = V{X − a + Y − b} = E{(X − a + Y − b)2} = E{(X −
a)2} + 2E{(X − a)(Y − b)} + E{(Y − b)2} = V{X} + V{Y} = σ2 + τ2
Consider n independent trials for X; called X1, …, Xn.
The expectation of their average is (as expected!):
X 1 X n EX 1 EX n
E
EX a
n
n
9.8
The variance of their average is (using independence):
X 1 X n V X 1 V X n n
V
2
2
n
n
n
n
2
2
So, what is the probability that their average A is not close
to the mean E{X} = a? Use Chebyshev’s inequality:
E A a V A
P A a
2
Let n → ∞
2
2
2
n
Weak Law of Large Numbers: The average of a large
enough number of independent trials comes arbitrarily
close to the mean with arbitrarily high probability.
2
9.8