This paper proposes a system based on Passive Infrared Sensor[3]
advertisement

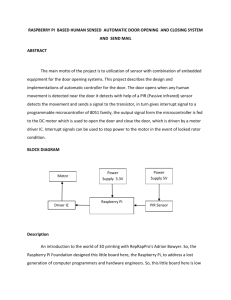
Advanced PIR Based Security System Swati Mishra Assistant Professor JSSATE, NOIDA (INDIA) Vishal Chauhan, Suryakant Singh, Harsh Sachan Student JSSATE, NOIDA (INDIA) This paper proposes a system based on Passive Infrared Sensor[3] for advanced security for military purposes. The system will eliminate the limitations of previous detection systems due to jammer. The system will sense the signal generated by the PIR sensor mounted in three directions with a photo detector at the gate to sense the human intrusion. Any intrusion will trigger the microcontroller for buzzer activation and display the direction of intrusion on LCD. The system also includes a LASER shooter or fainting mechanism on a stepper which will rotate to the direction of intrusion and eliminate the danger. the phenomena that a body will have certain temperature present in the environment. Also a body with certain temperature will emit infrared radiations of a certain wavelength. PIR sensor has a capability to detect radiations from the body and the sensors are called Passive Infrared Sensors because they sense radiations emitted from the other body rather than sensing its own radiation after reflection. New system proposed can be used for highly classified areas where no human breach is permitted into the perimeter of the area. Detection in all four directions is done continuously to detect human intrusion and the direction will be displayed on the LCD. Along with this a fainting mechanism or a LASER gun mounted on a stepper motor will be provided. The stepper motor will move the shooter to the direction of intrusion and activate it to eliminate the danger. ABSTRACT KEYWORDS Passive Infrared Sensor, 4049IC, 16X2 LCD, ATMEL 89S52, Photodiode, 7805IC 1. INTRODUCTION In today’s era the use of jammer has limited the use of most sensors. During the surgical strike of Osama-Bin–laden the American planes could not be detected by the Pakistan Air Force. The use of jammers by the plane absorbed the ultrasonic waves emitted by the RADAR systems. Thus a new system is required to eliminate this limitation. Passive Infrared Sensors[3] serves this purpose to quite an extent. PIR sensor has many advantages than most other sensors. It is based on 2. RELATED WORKS Previous PIR based systems are based on home theft security system or motion detection. Some of the systems include- 1. GSM network based home safeguard system [2], 2. Human tracking system, 3. Design and Implementation of modular home security system with short messaging system. Most of the PIR based systems build previously are for domestic security. Previously alarm based systems were used which would trigger an alarm and indicate the intrusion and the owner of the house will have to take necessary precautions. Some of the systems have a capability to turn on the video recording or image capturing system [1][2]. However all these system are efficient for domestic environment where main focus is on the detection of the intrusion. this logic. Darlington pair can be used to trigger buzzer and the stepper motor by the microcontroller. Inverter IC will be used to help activate the circuit for negative waveform. Full wave rectifier circuit will be used to provide for the DC supply for the LCD, IC, and the microcontroller. In military security areas the intruder may be armed thereby detection alone should not be the requirement of the system. System should be capable to eliminate the danger efficiently. We have tried to work on these limitations and eliminate them 4. PIR SENSOR 3. PROPOSED APPROACH The system will consist of three PIR sensor modules deployed in the directions other than the direction in which gate is present. These three sensors will detect the presence of human body and its intrusion to the perimeter. If any presence is found there will be change in the output from the PIR module, which will activate the microcontroller. When any person is coming from except to main gate then PIR sensor activate and provide a positive output to 4049ic, 4049ic is an inverter IC which provides negative output to microcontroller. The microcontroller will trigger the alarm and display the direction of intrusion on a LCD which can be provided at the place where continuous security monitoring is done by security people. The microcontroller will also rotate the stepper motor to the direction of intrusion which has shooter mounted on it and shoot the person with some gas or anesthesia to faint him. Thus system will eliminate the danger quickly and efficiently. For intrusion through gate, photodiode based circuit will be provided which activate the buzzer and display the information on LCD. A circuit has to be designed keeping in mind the negative wave triggering of the microcontroller and build the circuit around PIR sensors allow you to sense motion, almost always used to detect whether a human has moved in or out of the sensors range. They are small, inexpensive, low-power, easy to use and don't wear out. For that reason they are commonly found in appliances and gadgets used in homes or businesses. They are often referred to as PIR, "Passive Infrared", "Pyro-electric", or "IR motion" sensors [3]. PIRs are basically made of a pyro-electric sensor (which you can see above as the round metal can with a rectangular crystal in the center), which can detect levels of infrared radiation. Everything emits some low level radiation, and the hotter something is, the more radiation is emitted. The sensor in a motion detector is actually split in two halves. The reason for that is that we are looking to detect motion (change) not average IR levels. The two halves are wired up so that they cancel each other out. If one half sees more or less IR radiation than the other, the output will swing high or low. Along with the pyro-electric sensor is a bunch of supporting circuitry, resistors and capacitors. It seems that most small hobbyist sensors use the BISS0001 ("Micro Power PIR Motion Detector IC") , undoubtedly a very inexpensive chip. This chip takes the output of the sensor and does some minor processing on it to emit a digital output pulse from the analog sensor. When there is no human present in the proximity of the sensor, the amount of infrared radiation detected by both the slots will be same. Now sensing of a body is a two-fold operation. First the body will be detected entering by one half of the sensor. This causes a positive differential change between the two halves. Now the body will be sensed by the other half slot of the sensor and a negative differential change will be generated. 5. CIRCUIT DESIGN While designing the system to get the required output multiple steps and precautions have to be kept in mind. Various fluctuations and errors have to be terminated so as to get the result as close to the expected outcome. Keeping in mind the nature of power supply for various elements used in the circuit transformer and rectifier circuits will be used. Figure 5 shows the block representation of the system. The entire system can be divided into following blocks: The PIR sensor has two slots in it; each slot is made of a special material that is sensitive to IR. 1. Power Supply 2. Sensing Module 3. Processing Unit or Microcontroller 4. 5. 6. 7. LCD Stepper Motor Control Other Elements Remaining Circuit 5.1 Power Supply The system is supplied with a 220V 50Hz AC. However various elements the will be used in the system such as 89S52MCU, 4049IC, LCD work only with DC signal. Also power supply required by them is in the range of 3-10 volts. Thus a step down transformer will be used to convert 220V signal to 12V AC signal. A center-tapped full wave rectifier will be used to convert the AC signal into DC. However in the entire conversion process fluctuations will develop which can be removed using capacitors. Now the 12V DC signal is converted to 5V by a 7805 voltage regulator IC [8]. 5.2 Sensing Module The sensing module will consist of 3 PIR sensing module and 1 gate sensor. Gate sensor will consist of a photo-emissive diode and a photo-detector diode. As a human enters through the gate the circuit between the two diodes will open as the light emitted by the diode will be blocked by the person. This will develop a negative waveform using 4049 invertor IC [7], which will activate the microcontroller and set the buzzer ON. The three PIR sensors will be mounted on three directions other than gate. They will continuously monitor the human intrusion to the perimeter on the campus and send an output which will activate the microcontroller again using the 4049 invertor IC. 5.3 Microcontroller Unit ATMEL 89S52 microcontroller will be used to control the circuit and get the desired output. It has features like 8kB flask memory, 256 bytes RAM, 3 Timer/Counters, 8 bit processor, and 4 ports [9]. It is a 40 pin IC. A clock pulse generator with a crystal frequency of 11.0592MHz will be used externally connected to the pin 18 and 19 of the controller. The main function of the MCU is to read the output from the PIR sensors and the gate sensor and set the alarm ON. It will also be programmed to display the direction of intrusion and control the stepper motor. 5.4 LCD LCD module used is a 16X2 LCD. A 16x2 LCD means it can display 16 characters per line and there are 2 such lines. In this LCD each character is displayed in 5x7 pixel matrix. This LCD has two registers, namely, Command and Data. The command register stores the command instructions given to the LCD. A command is an instruction given to LCD to do a predefined task like initializing it, clearing its screen, setting the cursor position, controlling display etc. The data register stores the data to be displayed on the LCD. The data is the ASCII value of the character to be displayed on the LCD. Click to learn more about internal structure of a LCD. 5.5 Stepper Motor Control Stepper motor will have a rod mounted on its rotor. This rod will control the movement of a shooter which can shoot electromagnetic wave or a gas so as to faint the intruder. The stepper motor [11] will be driven using ULN2003A IC [10] controlled by the MCU. ULN2003A IC has Darlington transistor array as the stepper requires too much current to be driven. Some precautionary measure has to be taken to eliminate the back-EMF generated by the motor. This can be done by connecting a diode to the outputs of the ULN2003A IC which will stop the current from going back to the IC. 5.7 Remaining Circuit Darlington Transistor pair [12] will be used to activate the buzzer and the shooter. The pair will have two pairs a pnp and an npn Darlington pair. It is used to increase the current gain in the circuit. 4049IC is used as the output from the sensors will be positive and the microcontroller gets activated for negative signals. 6. CIRCUIT OPERATION The entire circuit operation takes places accordingly following the blocks as explained above. First of all the 220v AC supply is converted to 12V AC by a step down transformer. Then this 12V AC signal is converted to 12V DC signal using a centertapped full wave rectifier. After the DC conversion the signal is passed through a capacitor to bring down the fluctuations. Now the signal is sent to a voltage regulator 7805IC which converts the 12V signal to 5V which is the required power supply for LCD and the MCU and the 4049 invertor IC. Again the output of the 7805IC is passed through a capacitor to remove the fluctuations introduced. Once the proper power supply is generated the next is the operation of sensing module. The PIR sensors generate a positive output waveform on detecting the intrusion in its proximity. However our microcontroller is negatively triggered thus an invertor has to be used to convert the output from sensor before being fed to the MCU. 4049Ic is used which has a logic inversion circuit inside it. It converts the positive waveform to a negative one. The outputs of the 4049IC will be connected to input port of the microcontroller. The input from the gate sensor circuitry will also be fed to the microcontroller input. Gate sensors consist of a combination of a photo-emissive diode and a photo-detector diode. As a person enters through the gate the light emitted by the photo-emissive diode will be blocked and hence the circuit of the detector and emissive diode combination will break. A common base configuration transistor is used to help transistor work as a switch and send a negative input to the microcontroller whenever the circuit breaks. This will activate the MCU for further operations. The ATMEL89S52 microcontroller is so programmed that it receives the input from the sensors, gets activated and displays the desired information on LCD. It has a buzzer connected to one of its port. However the output current from the microcontroller will not be enough to activate the buzzer. To overcome this situation a Darlington pair is used to increase the current gain and hence activate the buzzer. Another pin output will be connected to the shooter mounted on the stepper motor which will be activated electronically. It again has a Darlington transistor pair to increase the current gain and hence activate the shooter, once the stepper motor has rotated to the direction of the intrusion. A 16X2 LCD is used which displays the direction of the person intrusion. It uses the ASCII codes of the characters to display them on its board. The microcontroller is programmed to sends the ASCII codes of the characters to be displayed in the set of 8 bits to the data pins of the LCD. One output port of the microcontroller is connected to the input of the ULN2003A IC. Four outputs for the movement of the motor in four direction four output of the microcontroller are fed to the inputs of the ULN2003A. Another limitation of the stepper motor is the generation of back-emf which may cause a considerable damage to the circuit. To overcome this situation four diodes can be used will work as switches. They will open circuit for the reverse bias conditions whenever stepper motor sends some back-emf to the circuit. The stepper motor requires a sufficient amount of current for its proper working. The loss in the current is recovered by use of the ULN2003A IC. It consists of 7 Darlington transistor arrays which help in increasing the current gain. 7. ALGORITHM 8. FLOWCHART The system works with the following steps to get the desired output: Figure 6 shows the flowchart diagram of the system to explain the steps of how the system will accordingly. i. Continuous Monitoring by the PIR sensors and the gate sensor. ii. If the output of the PIR sensor goes ‘HIGH’, it inverted by the 4049IC and the microcontroller is activated. Else the system goes to step vi. iii. Microcontroller displays the direction of intrusion on the LCD, and triggers the alarm. If the PIR output is ‘HIGH’ system goes to step iv else system goes to step v. iv. Stepper Motor is activated which rotates to the direction of intrusion and activates the shooter. v. The system is reset to reset the position of shooter on the stepper motor. vi. The output of the gate sensor is checked if the intrusion is from the gate. If the intrusion is from gate, the system jumps to step iii. Else the system goes to step i. 9. RESULT The system was tested by implementing the design steps discussed earlier. The CD was found displaying the correct data for all the cases of intrusion. When the system was turned ON the following message was being displayed. The stepper motor was found working accurately to point to the correct direction of the intrusion. The shooter was activated once the stepper motor had completed its rotation to the correct direction. This is shown in figure 11. For the intrusion detected by the other sensors were as follows: 10. CONCLUSION In this paper Advanced PIR based security system has been proposed. The display of the intrusion direction was found accurate and displayed on the LCD. However, the stepper motor has to be set to perfect north direction to make it rotate to the correct position of intrusion. Apart from that no limitation was found. 11. REFERENCES [1] Pema Chodon, Devi Maya Adhikari, Gopal Chandra, Rajen Biswa, Sangay,G. 2013. Passive Infrared (PIR) Sensor Based Security System. Technical Report. Royal University of Bhutan, Phuentsholing, Bhutan. [2] Zamshed Iqbal Chowdhury, Masudul Haider Imtiaz, Muhammad Moinul Azam, Rumana Aktar Sumi, Nafisa Shahera Nur,G. 2011. Design and Implementation of Pyroelectric Infrared Sensor Based Security System Using Microcontroller. Technical Report. University of Dhaka, Ahsanullah University of Science & Technology, Dhaka, Bangladesh. [3]Ladyada, P. 2014 PIR Motion Sensor. Adafruit Learning System. [4]Santoso Budijono, Jeffri Andrianto, Muhammad Axis Novradin Noor, G. 2014. Technical Report. Bina Nusantra University, Indonesia. [5]Seedstudio PIR Sensor website, http://www.seedstudio.com/wiki.File:Twig_BISS0001.pdf [6] Walker Phillips, G. 1985. Electronic Security System. Technical Report. Cambriidge UK [7] CD4049UB, CD4050B, Texas Instrument website,http://www.ti.com/lit/ds/symlink/cd405 0b.pdf [8] IC 7805 (Voltage Regulator IC) Engineer Garage website, http://www.engineersgarage.com/electroniccomponents/7805-voltage-regulator-ic [9]ATMEL 8-bit Microcontroller with 8K Bytes In-System Programmable Flash AT89S52 website, http://www.atmel.com/images/doc1919.pdf [10] ULN2003A-ULN2004A Seedstudio website, http://www.seeedstudio.com/document/pdf/UL N2003%20Datasheet.pdf [11] Industrial Circuits Application Note Stepper Motor Basics Solarbotics website, http://www.solarbotics.net/library/pdflib/pdf/m otorbas.pdf [12] Darlington Transistor Pair Electronics Tutorial website, http://www.electronicstutorials.ws/transistor/darlington-transistor.html