Mechanics: Statics, Kinematics
advertisement

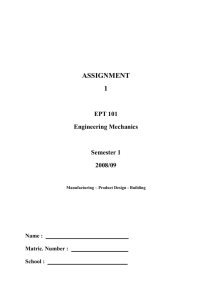
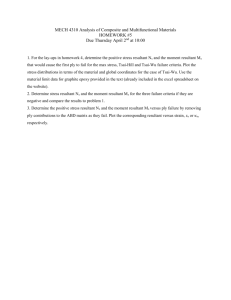
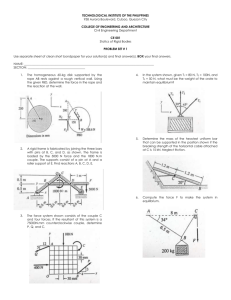
Technical University of Sofia Branch Plovdiv Theoretical Mechanics STATICS KINEMATICS * Navigation: Right (Down) arrow – next slide Left (Up) arrow – previous slide Esc – Exit Notes and Recommendations: ruschev@tu-plovdiv.bg Lecture 5 Two-Dimensional Force Systems Resultant. Geometrical method. The resultant of a system of forces is the simplest force combination which can replace the original forces without altering the external effect on the rigid body to which the forces are applied. We obtain the magnitude and direction of the resultant force R by forming the force polygon shown in part b of the figure, where the forces are added head-to-tail in any sequence. N Thus, for any system of coplanar forces we may write R F1 F2 F3 ... Fk N N k 1 k 1 Rx Fkx Ry Fky a k 1 R Rx2 Ry2 b Graphically, the correct line of action of R may be obtained by preserving the correct lines of action of the forces and adding them by the parallelogram law. We see this in part a of the figure for the case of three forces where the sum R1 of F2 and F3 is added to F1 to obtain R. The principle of transmissibility has been used in this process. Lecture 5 Two-Dimensional Force Systems Resultant. Algebraic Method We can use algebra to obtain the resultant force and its line of action as follows: 1. Choose a convenient reference point and move all forces to that point. This process is depicted for a three-force system in Figs. a and b, where M1 , M2 , and M3 are the moments resulting from the transfer of forces F1 , F2, and F3 from their respective original lines of action to lines of action through point O. Lecture 5 Two-Dimensional Force Systems Resultant. Algebraic Method. Contd. 1. Add all forces at O to form the resultant force R, and add all couples to form the resultant couple MO. We now have the single force-moment system, as shown in Fig. c. 2. In Fig. d, find the line of action of R by requiring R to have a moment of MO about point O. Note that the force systems of Figs. a and d are equivalent, and that Σ(Fd) in Fig. a is equal to Rd in Fig. d. Principle of Moments This process is summarized in equation form by N R Fk k 1 N N k 1 k 1 M O M Ok Fk .d k R.d M O The first two equations reduce a given system of forces to a force-moment system at an arbitrarily chosen but convenient point O. The last equation specifies the distance d from point O to the line of action of R, and states that the moment of the resultant force about any point O equals the sum of the moments of the original forces of the system about the same point. Lecture 5 Sample Problem 1 SOLUTION: a) Compute the resultant force for the forces shown and the resultant moment for the moments of the forces about A. For the beam, reduce the system of forces shown to (a) an equivalent force-moment system at A, (b) an equivalent forcemoment system at B, and (c) a single force or resultant. Note: Since the support reactions are not included, the given system will not maintain the beam in equilibrium. b) Find an equivalent force-moment system at B based on the forcemoment system at A. c) Determine the point of application for the resultant force such that its moment about A is equal to the resultant moment at A. Lecture 5 Sample Problem 1 SOLUTION: a) Compute the resultant force and the resultant moment at A. R F 150 N j 600 N j 100 N j 250 N j R 600 N j R MA r F 1.6 i 600 j 2.8 i 100 j 4.8 i 250 j M AR 1.6 600 2.8100 4.8 250 1880 N .m R M A 1880 N m k Lecture 5 Sample Problem 1 b) Find an equivalent force-moment system at B based on the force-couple system at A. The force is unchanged by the movement of the forcemoment system from A to B. R 600 N j The moment at B is equal to the moment about B of the force-moment system found at A. R R M B M A rB A R 1880 N m k 4.8 m i 600 N j 1880 N m k 2880 N m k R M B 1000 N m k M BR 1880 N m 4.8 m 600 N 1000 N m Lecture 5 Sample Problem 1 c) Determine the point of application for the resultant force such that its moment about A is equal to the resultant moment at A. d M A 1880 N .m 3.13 m R 600 N Lecture 5 Sample Problem 2 F2 500 N Replace the force system by a resultant force and moment at point O. F3 200 N F1 750 N SOLUTION: F4 200 N R F1 F2 F3 F4 Point O is selected as a convenient reference point for the force–moment system which is to represent the given system. Rx 300 N Rx F1x F2 x F3 x F4 x Ry 350 N Ry F1 y F2 y F3 y F4 y R Rx2 Ry2 460.98 N F1x 0 F1 y 750 N M O F1.1, 25 F2 x .1 F2 y .2,5 F3 .1 F4 .0 3 4 F2 x 500 300 N F2 y 500 400 N 5 5 F3 x 200 N F3 y 0 M O 750.1, 25 300.1 400.2,5 200.1 F4 x 200 N F4 y 0 M O 437,5 N .m Lecture 5 Sample Problem 3 Replace the three forces which act on the bent bar by a force–moment system at the support point A.