INCOSE IW09
Feb 2, 2009 San Francisco
Model-Based Systems Engineering (MBSE) Challenge
Modeling & Simulation Interoperability (MSI)
Team Status Update
[with Mechatronics Applications]
Updates beyond IS08
- Phase 1 results (8/2008)
- Phase 2 progress
(as of 1/2009)
Presenter
Russell Peak - Georgia Tech
Other Team Leaders
Roger Burkhart, Sandy Friedenthal, Chris Paredis, Leon McGinnis
v1.1
Portions are Copyright © 2009 by Georgia Tech Research Corporation, Atlanta, Georgia 30332-0415 USA. All Rights Reserved.
Permission to reproduce and distribute without changes for non-commercial purposes (including internal corporate usage) is hereby granted provided this notice and a proper citation are included.
INCOSE Model-Based Systems Engineering (MBSE) Challenge:
Modeling & Simulation Interoperability (MSI) Team Status Update
[with Mechatronics Applications]
Abstract
This presentation highlights Phase 1 results from an excavator testbed that interconnects simulation models with
associated diverse system models, design models, and manufacturing models. It then focuses on work-inprocess status for Phase 2, including overview of a mobile robotics testbed and a SysML-driven demonstration.
The overall goal is to enable advanced model-based systems engineering (MBSE) in particular and modelbased X (MBX) [1] in general. Our method employs SysML as the primary technology to achieve multi-level
multi-fidelity interoperability, while at the same time leveraging conventional modeling & simulation tools
including mechanical CAD, factory CAD, spreadsheets, math solvers, finite element analysis (FEA), discrete
event solvers, and optimization tools.
This work is sponsored by several organizations including Deere and Lockheed and is part of the Modeling &
Simulation Interoperability Team [2] in the INCOSE MBSE Challenge (with applications to mechatronics as an
example domain).
[1] The X in MBX includes engineering (MBE), manufacturing (MBM), and potentially other scopes and contexts such as model-based
enterprises (MBE).
[2] http://www.pslm.gatech.edu/projects/incose-mbse-msi/
Citation
Peak RS et al. (2009-02) INCOSE Model-Based Systems Engineering (MBSE) Challenge:
Modeling & Simulation Interoperability (MSI) Team Status Update [with Mechatronics Applications].
INCOSE Intl Workshop, San Francisco.
http://www.pslm.gatech.edu/projects/incose-mbse-msi/
Contact
Russell.Peak @ gatech.edu, Georgia Institute of Technology, Atlanta, www.msl.gatech.edu
2
Collaboration Approach
Primary Current Team
• Deere & Co.
– Roger Burkhart
• Georgia Institute of Technology (GIT)
– Russell Peak, Chris Paredis, Leon McGinnis, & co.
– Leveraging collaborations in
PSLM Center SysML Focus Area (see next slide)
• Lockheed Martin
– Sandy Friedenthal
• Vendor collaboration
Page 3
Contents
• Phase 1 Overview and Results
– From August 2007 to August 2008
• Phase 2 Progress
– From August 2008 to August 2009
4
Simulation & Analysis Using SysML
Dec 2008: Final Phase 1
Overview Presentation
Experiences Applying SysML in an Excavator Testbed and More
Abstract
This talk overviews Phase 1 experiences and lessons learned from an excavator testbed that interconnects
simulation models with associated diverse system models, design models, and manufacturing models. The goal
is to enable advanced model-based systems engineering (MBSE) in particular and model-based X (MBX) [1] in
general. Our method employs SysML as the primary technology to achieve multi-level multi-fidelity
interoperability, while at the same time leveraging conventional modeling & simulation tools including mechanical
CAD, factory CAD, spreadsheets, math solvers, finite element analysis (FEA), discrete event solvers, and
optimization tools. This work is sponsored by several organizations including Deere and Lockheed and is part of
the Modeling & Simulation Interoperability Team [2] in the INCOSE MBSE Challenge (with applications to
mechatronics as an example domain).
[1] The X in MBX includes engineering (MBE), manufacturing (MBM), and potentially other scopes and contexts
such as model-based enterprises (MBE).
[2] http://www.pslm.gatech.edu/projects/incose-mbse-msi/
Citation
RS Peak, CJJ Paredis, LF McGinnis, DA Zwemer (2008-12) Simulation & Analysis Using SysML—Experiences
Applying SysML in an Excavator Testbed and More. OMG SysML Information Days, Burlingame CA.
http://eislab.gatech.edu/pubs/seminars-etc/2008-12-omg-sysml-info-days-peak/
Contact
Russell.Peak@gatech.edu, Georgia Institute of Technology, Atlanta, www.msl.gatech.edu
5
MBSE Challenge Team Objectives
Phase 1: 2007-2008
Overall Objectives
• Define & demonstrate capabilities
to achieve modeling & simulation interoperability (MSI)
• Phase 1 Scope
– Domain: Mechatronics
– Capabilities: Methodologies, tools, requirements,
and practical applications
– MSI subset: Connecting system specification & design models
with multiple engineering analysis & dynamic simulation models
• Test & demonstrate how SysML facilitates effective MSI
Note: The MSI Team objectives to date are primarily based on projects in the GIT PSLM Center sponsored
by industry and government—see backup slides.
Page 6
MBSE Challenge Team Objectives
Phase 1: 2007-2008
Specific Objectives
1. Define modeling & simulation interoperability (MSI) method
2. Define SysML and tool requirements to support MSI
1. Provide feedback to vendors and OMG SysML 1.1 revision task force
3. Demonstrate MSI method with 3+ engineering analysis
and dynamic simulation model types
1. Include representative building block library: fluid power
2. Include hybrid discrete/continuous systems
described by differential algebraic equations (DAEs)
4. Develop roadmap beyond Phase 1
Page 7
Primary Impacts
Enabling Capabilities
Increased Knowledge
Capture & Completeness
Increased
Modularity & Reusability
Increased
Traceability
Reduced
Manual Re-Creation
Increased
& Data Entry Errors
Automation
Reduced
Modeling Effort
Increased
Analysis Intensity
Reduced
Time
Reduced
Cost
Reduced
Risk
Increased
Understanding
Increased
Corporate Memory
Increased Artifact
Performance
Interoperability Method Objectives
■
■
■
■
■
■
■
■
■
■
■
■
■
■
■
■
■
■
■
■
■
■
8
Excavator Modeling & Simulation Testbed
Tool Categories View
SysML Tools
RSA/E+ / SysML
Factory
Model
No Magic / SysML
RSA/E+ / SysML
Excavator
Executable
Scenario
Operational
Scenario
Excavator
System Model
Interface & Transformation Tools
(VIATRA, XaiTools, ...)
Traditional
Descriptive Tools
Traditional
Simulation & Analysis Tools
ModelCenter
NX / MCAD Tool
Optimization
Model
Excavator
Boom Model
FactoryCAD
Ansys
Mathematica
FEA Model
Reliability
Model
Factory
Layout Model
Excel
Dymola
Cost Model
Dig Cycle
Model
Excel
Production
Ramps
eM-Plant
Factory
Simulation
2008-02-25a
9
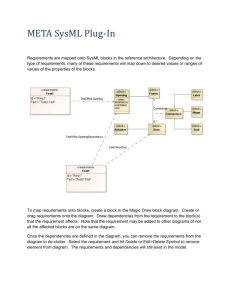
Excavator Modeling & Simulation Testbed
Interoperability Patterns View (MSI Panorama per MIM 0.1)
MCAD Tools
NX
d0. Simulation Building Block
Libraries
Cost
Concepts
Optimization
Concepts
Reliability
Concepts
Solid
Mechanics
Queuing
Concepts
Fluid
Mechanics
Data Mgt. Tools
c0. Context-Specific
Simulation Models
Excavator Sys-Level Models
Optimization Model
Objective
Function
Cost
Model
Excel
b0. Federated
Descriptive Models
Excavator Domain Models
e0. Solver Resources
Optimizers
ModelCenter
Generic Math Solvers
Reliability
Model
Excel
Dig Cycle
Model
Mathematica
Federated Excavator Model
System & Req Tools
RSD/E+
...
MagicDraw
Operations
Req. &
Objectives
Boom Linkage Models
Boom
Extensional
Linkage Model
Linkages
Dump Trucks
Sys Dynamics Solvers
Stress/Deformation Models
Plane Stress
Linkage Model
Dymola
FEA Solvers
Ansys
Factory Domain Models
Federated Factory Model
Factory CAD Tools
FactoryCAD
Req. &
Objectives
Excavator
MBOM
Assembly Lines
AGVs
Buffers
Work Cells
Machines
Boom Mfg. Assembly Models
Assembly Process Models
MM1 Queuing
Assy Model
Discrete Event
Assy Model
Discrete Event Solvers
(Specialized)
eM-Plant /
Factory Flow
Legend
Tool & native model interface (via XaiTools, APIs, ...)
Parametric or algorithmic relationship (XaiTools, VIATRA, ...)
Composition relationship (usage)
Native model relationship (via tool interface, stds., ...)
Dig Site
Hydraulics
Subsystem
Notes
1) The pattern names and identifiers used here conform to HMX 0.1 — a method
under development for generalized system-simulation interoperability (SSI).
2) All models shown are SysML models unless otherwise noted.
3) Infrastructure and middleware tools are also present (but not shown) --e.g.,
PLM, CM, parametric graph managers (XaiTools etc.), repositories, etc.
a0. Descriptive Resources
(Authoring Tools, ...)
2008-02-20
10
Contents
• Problem Description
– Characteristics of Mechatronic Systems
– Challenge Team Objectives
• Technical Approach
– Techniques and Testbeds
• Deliverables & Outcomes
• Collaboration Approach
Page 11
Deliverables & Outcomes
Phase 1 (Aug 2008)
• Solution and supporting models
– Excavator test case models, test suites, …
• MBSE practices used
– Modeling & simulation interoperability (MSI) method, …
• Model interchange capabilities
– Tests between SysML tools, CAD/CAE tools, …
• MBSE metrics/value
– See “Benefits” slide with candidate metrics
• MBSE findings, issues, & recommendations
– Issue submissions to OMG and vendors, publications, …
• Training material
– Examples, tutorials, …
• Plan forward (Phase 2 and beyond)
Page 12
Primary Public Reporting Venues
• Call for Participation @ IS’07
– Jun 26, 2007 in San Diego
• Phase 1 Status Update @ IW’08 MBSE Workshop #2
– Jan 25, 2008 in Albuquerque
• Phase 1 Status Update @ Frontiers Workshop
– May 14, 2008 in Atlanta
• Phase 1 Status Update @ IS’08
– Jun 15-19, 2008 in Utrecht
• Phase 1 Final Report & Archive of Models
– Aug 2008 [proprietary deliverable]
– Feb 2009 (estimate) via website [public version]
• Phase 2 Status Updates @ IW’09, etc.
• Misc. reports/updates/publications @ various venues
– OMG meetings, society & vendor conferences, ...
Page 13
Phase 1 Report
• Proprietary Deliverable: Aug 31, 2008 (v1.0)
– 127 pages; 137 figures; 5 tables
• Sanitized public version: expected ~Feb 2009
http://www.pslm.gatech.edu/projects/incose-mbse-msi/
Page 14
Contents
• Phase 1 Overview and Results
– From August 2007 to August 2008
• Phase 2 Progress
– From August 2008 to August 2009
15
MBSE Challenge Team Objectives
Phase 2: 2008-2009
Overall Objectives
• Refine & extend beyond Phase 1 capabilities
for modeling & simulation interoperability (MSI)
• Phase 2 Scope [new aspects]
– Domains: Primary: Mechatronics (expanded excavator testbed)
Secondary: Others to demo reusability
– Capabilities: Methodologies, tools, requirements,
and practical applications (MIM v2, ...)
– MSI subset: Connecting system specification & design models
with multiple engineering analysis
– Deployment: Productionizing techniques & tools
to enable ubiquitous practice
• Advance & demo how SysML facilitates effective MSI
Page 16
MBSE Challenge Team Objectives
Phase 2: 2008-2009
Specific Objectives
1. Extend modeling & simulation interoperability method: MIM 2.0
1. Generalizations: graph transformations, variable topology, reusability,
parametrics 2.x, trade study support, inconsistency mgt., E/MBOM
extensions, method workflow, ...
2. Specializations: software, closed-loop control, electronics, ...
3. Interfaces to new tools: Matlab/Simulink, ECAD, Arena, ...
2. Refine SysML and tool requirements to support MIM 2.0
1. Provide feedback to vendors and OMG SysML 1.2/2.x task forces
3. Demonstrate extensions in updated testbed
4. Define deployment plan and initiate execution
5. Refine roadmap beyond Phase 2
Page 17
Phase 2 Work-In-Process
[selected topics]
• SysML parametrics and solvers
• SysML-Modelica interoperability
• Mobile robots demonstration platform
18
SysML-XaiTools Interfaces for Parametrics Solving
Status Update
R Peak, M Wilson, A Scott, et al.
2009-01-06
• Aggregate extensions
• Excel interface extensions (WIP)
• Mathematica extensions
– Constraint blocks with arbitrary m code
– Results plotting
• Parametric modeling with diverse submodels/solvers
• Matlab/Simulink support (WIP)
• Variable topology support
– M Bajaj dissertation; extending CPM
• Parametrics graph visualization
19
Enabling Executable SysML Parametrics
Commercialization by InterCAX LLC in Georgia Tech VentureLab incubator program
Advanced technology for graph management and solver access via web services.
COB Solving & Browsing
Plugins Prototyped by GIT
(to SysML vendor tools)
1) Artisan Studio [2/06]
2) EmbeddedPlus [3/07]
3) NoMagic [12/07]
NextGeneration
Spreadsheet
Parametrics plugin
COB API
Execution via
API messages
or exchange files
COB Services (constraint graph manager, including COTS solver access via web services)
XaiTools SysML Toolkit™
SysML Authoring Tools
...
Native Tools Models
...
Ansys
(FEA Solver)
...
L
COTS =
commercial-off-the-shelf
(typically readily available)
FL
TL Mathematica
EA
(Math Solver)
XaiTools FrameWork™
Composable Objects (COBs)
Traditional COTS or
in-house solvers
20
Productionizing/Deploying GIT XaiTools™
Technology for Executing SysML Parametrics
www.InterCAX.com
Vendor
SysML
Tool
Prototype by
GIT
Product by
InterCAX LLC
Artisan
Studio
Yes
<tbd>
EmbeddedPlus
E+ SysML / RSA
Yes
<tbd>
No Magic
MagicDraw
Yes
ParaMagic™
(Jul 21, 2008 release)
Telelogic/IBM
Rhapsody/Tau
<tbd>
<tbd>
Sparx Systems
Enterprise Arch.
<tbd>
<tbd>
n/a
XMI import/export
Yes
<tbd>
Others <tbd>
Others <tbd>
<tbd>
<tbd>
[1] Full disclosure: InterCAX LLC is a spin-off company originally created to commercialize technology from RS Peak’s GIT group. GIT has licensed technology to
InterCAX and has an equity stake in the company. RS Peak is one of several business partners in InterCAX. Commercialization of the SysML/composable object
aspects has been fostered by the GIT VentureLab incubator program (www.venturelab.gatech.edu) via an InterCAX VentureLab project initiated October 2007.
21
Broadly Applicable Technology
Examples of Executable SysML Parametrics
• Road scanning system
using unmanned aerial vehicle (UAVs)
• Space systems orbit planning
• Environmentally-conscious energy systems
•
...
• Mechanical part design and analysis (FEA)
•
...
• Insurance claims processing
and website capacity model
• Financial model for small businesses
• Banking service levels model
•
...
22
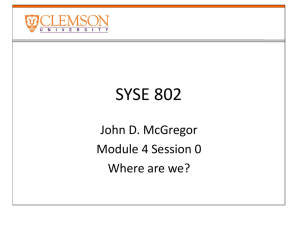
Satellite Tutorial Highlights: SimpleSat
par [Block] Satellite[
definition ]
r1 : MassBalance
{m = m1 +m2 + m3 + m4}
e1
mass
m
m1
e10
m2
m3
m4
e2
e3
propulsionSubSys :
PropulsionSystem
e5
e4
instruments :
Instruments
controllerSubSys :
ControlSystem
powerSubSys :
PowerSystem
mass
mass
mass
mass
power
power
power
power
e6
e7
e9
e8
p
2
p
3
p
r2 : PowerBalance
{p = p1 + p2 + p3}
p
reqVerifierMass :
MarginOfSafetyBlock
e12
allowable
1
mass
r3 : CtrlPwrEqn
{pwrctrl = 0.2 * mass}
pwrctrl
mos
determined
e11
23
Solver Access via XaiTools Web Services (XWS)
S1: General Multi-Solver Setup (prototype)
Client Machines
Server Machines
XaiTools Web Services
Rich Client
Servlet Container
HTTP/XML
Wrapped Data
SOAP Servers
XaiToolsAnsys
Ansys
XaiTools
XaiTools
Math.
XaiTools
SolverSolver
Server
Solver
Server
Solver
Server
Wrappers
Internet/Intranet
FEA Solvers
Ansys, Patran,
Abaqus, ...
Math Solvers
Engineering
Service Bureau
...
SysML-based
COB models
Apache Tomcat
Web
WebServer
Server
(e.g. ParaMagic)
SOAP
Internet
XaiTools
Client
Mathematica
24
Solver Access via XaiTools Web Services (XWS)
S2: ParaMagic-Mathematica Setup (current product = XWS 2.2)
Client Machines
(End Users 1...n)
Server Machine @ Company X
XaiTools Web Services
Rich Client
Servlet Container
Internet/Intranet
MagicDraw
SysML Tool
Apache Tomcat
HTTP/XML
Wrapped Data
Web Server
SysML-based
COB models
SOAP
Internet
ParaMagic
SOAP Server
XaiTools Solver
Wrappers
Math Solver
Mathematica
Network Server
network increment(s)
...
25
SysML-XaiTools Interfaces for Parametrics Solving
Status Update
R Peak, M Wilson, A Scott, et al.
2009-01-06
• Aggregate extensions
• Excel interface extensions (WIP)
• Mathematica extensions
– Constraint blocks with arbitrary m code
– Results plotting
• Parametric modeling with diverse submodels/solvers
• Matlab/Simulink support (WIP)
• Variable topology support
– M Bajaj dissertation; extending CPM
• Parametrics graph visualization
26
Parametric modeling with
diverse submodels/solvers
• Approach:
– Wrapping as block/constraint block
• Examples to date [prototype]:
– Matlab
– Ansys
– Arbitrary Mathematica
– Arbitrary Java
• Similar for ~any arbitrary external solver
• Algorithm handles same model having
several diverse submodels
27
SysML-XaiTools Interfaces for Parametrics Solving
Status Update
R Peak, M Wilson, A Scott, et al.
2009-01-06
• Aggregate extensions
• Excel interface extensions (WIP)
• Mathematica extensions
– Constraint blocks with arbitrary m code
– Results plotting
• Parametric modeling with diverse submodels/solvers
• Matlab/Simulink support (WIP)
• Variable topology support
– M Bajaj dissertation; extending CPM
• Parametrics graph visualization
28
PhD Dissertation Defense
G.W.Woodruff School of Mechanical Engineering
Georgia Institute of Technology
Atlanta, GA, USA
Nov 3, 2008 * MRDC 4211
Knowledge Composition Methodology for
Effective Analysis Problem Formulation in
Simulation-based Design
Manas Bajaj
manas.bajaj@gatech.edu
Georgia Tech
Engineering Information Systems Lab
www.eislab.gatech.edu
Systems Realization Lab
www.srl.gatech.edu
Copyright © 1993-2008 by Georgia Tech Research Corporation, Atlanta, Georgia 30332-0415 USA. All Rights Reserved.
Abstract
http://smartech.gatech.edu/handle/1853/26639
In simulation-based design, a key challenge is to formulate and solve analysis problems efficiently to evaluate a
large variety of design alternatives. The solution of analysis problems has benefited from advancements in commercial
off-the-shelf math solvers and computational capabilities. However, the formulation of analysis problems is often a
costly and laborious process. Traditional simulation templates used for representing analysis problems are typically
brittle with respect to variations in artifact topology and the idealization decisions taken by analysts. These templates
often require manual updates and “re-wiring” of the analysis knowledge embodied in them. This makes the use of
traditional simulation templates ineffective for multi-disciplinary design and optimization problems.
Based on these issues, this dissertation defines a special class of problems known as variable topology multi-body
(VTMB) problems that characterizes the types of variations seen in design-analysis interoperability. This research thus
primarily answers the following question:
How can we improve the effectiveness of the analysis problem formulation process for VTMB problems?
The knowledge composition methodology (KCM) presented in this dissertation answers this question by addressing
the following research gaps: (1) the lack of formalization of the knowledge used by analysts in formulating simulation
templates, and (2) the inability to leverage this knowledge to define model composition methods for formulating
simulation templates. KCM overcomes these gaps by providing: (1) formal representation of analysis knowledge as
modular, reusable, analyst-intelligible building blocks, (2) graph transformation-based methods to automatically
compose simulation templates from these building blocks based on analyst idealization decisions, and (3) meta-models
for representing advanced simulation templates—VTMB design models, analysis models, and the idealization
relationships between them.
Applications of the KCM to thermo-mechanical analysis of multi-stratum printed wiring boards and multicomponent chip packages demonstrate its effectiveness—handling VTMB and idealization variations, and enhanced
computational efficiency (from several hours in existing methods to few minutes). In addition to enhancing the
effectiveness of analysis problem formulation, the KCM is envisioned to provide a foundational approach to model
formulation for generalized variable topology problems.
Copyright © 1993-2008 by Georgia Tech Research Corporation, Atlanta, Georgia 30332-0415 USA. All Rights Reserved.
30
KCM Functional Overview
Simulation Template Formulation
General Purpose Graph Transformation Architecture
KCM =
Knowledge
Composition
Methodology
Czarnecki and Helsen (2006);
Andries, Engels et al. (1999);
Varro et al. (2007)
KCM – Simulation Template Formulation Architecture
Artifact Model
Transformation library
ABB library
VTMB = variable topology multi-body
ABB = analysis building block
uses
Source Meta-Model
VTMB Design Meta-Model
refers to
Target Meta-Model
VTMB Design
Meta-Model
VTMB Behavior
Meta-Model
...
conforms to
conforms to
executes
conforms to
Target Models
Source Models
Fixed Topology
Design Alternatives i
reads
Transformation
Engine
writes
Fixed Topology
Design Alternatives i
Fixed Topology
Behavior Models ia
...
...
Design Models
Transformation Definition
Behavior
refers to
Behavior Model
Model
Formulation
Specifications
Formulation Specifications aa
Simulation
Templates
Copyright © 1993-2008 by Georgia Tech Research Corporation, Atlanta, Georgia 30332-0415 USA. All Rights Reserved.
31
KCM Functional Overview
Simulation Template Execution
KCM – Simulation Template Solution Architecture
Design Models
Simulation Models
Simulation Template ia
Fixed Topology Design
Alternatives i
Fixed Topology
Behavior Models ia
conforms to
conforms to
solves
FTMB Artifact
Model Instance i1
reads
Object Solvers
reads
FTMB Behavior
Model Instance i1a
...
...
writes
writes
Copyright © 1993-2008 by Georgia Tech Research Corporation, Atlanta, Georgia 30332-0415 USA. All Rights Reserved.
32
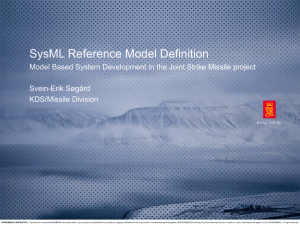
Electronics Test Case
Level 1: Substrates (PCBs / Panels / Chip Package substrates)
1d. Meshed FEA Model
(~10k Elements)
1e. Solved FEA Model
1a. Substrate
1c. ABB system model
1b. Idealized PCB design (APM)
(~100+
layered shell analysis bodies)
and simulation template (CBAM)
Level 3: PCAs
PCA top view
3d. Meshed FEA
Model
3e. Solved FEA
Model
3a. PCA
3b. Idealized PCA design
(APM) and simulation
template (CBAM)
3c. ABB system model
(~4000+ bodies;
8000+ interactions)
Level 2: Chip Packages / PCA components
Wireframe view
top and bottom components
exploded view
2d. Meshed FEA Model
(~10k Elements)
assembled view
2a. Chip Packages
2b. Idealized chip package design
(APM) and simulation template (CBAM)
2c. ABB system model
(~100-500 analysis bodies)
Copyright © 1993-2008 by Georgia Tech Research Corporation, Atlanta, Georgia 30332-0415 USA. All Rights Reserved.
2e. Solved FEA model
33
Research Contributions (Bajaj, 2008)
Effective Formulation of Complex Simulation Templates
Primary Capabilities
Variations in design topology
Variations in idealization intent
Efficiency
– 90%+ faster
– Reusable analysis building blocks (ABBs)
– Automated composition from building blocks
» Formal approach based on graph transformations
– Meta-models for design and behavior model abstractions
– Libraries of ABBs, transformation patterns, and rules
Copyright © 1993-2008 by Georgia Tech Research Corporation, Atlanta, Georgia 30332-0415 USA. All Rights Reserved.
34
SysML-XaiTools Interfaces for Parametrics Solving
Status Update
R Peak, M Wilson, A Scott, et al.
2009-01-06
• Aggregate extensions
• Excel interface extensions (WIP)
• Mathematica extensions
– Constraint blocks with arbitrary m code
– Results plotting
• Parametric modeling with diverse submodels/solvers
• Matlab/Simulink support (WIP)
• Variable topology support
– M Bajaj dissertation; extending CPM
• Parametrics graph visualization
35
Flattened Graph Visualization
[in collaboration with InterCAX—A. Scott Fall 2008 internship]
• Flattened graph [aka COB constraint graph]
– Flattened graph graph among value types
– Block encapsulation not shown
• Purpose
– Alternative way to understand / interact with a given model
• Primitive connections/relationships, structure, complexity, ...
– Enable visual/intuitive comparison of several models
– Possible additional SysML view of models
• Status
– Prototype that leverages ygraph toolkit
– Auto-generates flattened graph
– Construction animation and static final view
36
Examples
1. Spring systems (with animation)
2. Road scanning system
using LittleEye UAVs
3. Flap linkage mechanical design
4. Multi-year business financial model
For further information on these examples, see backup slide below entitled
“SysML Parametrics—Suggested Starting Points” for these references:
- Examples 1 and 3: Peak et al. 2007 (IS07 Parts 1 and 2)
- Examples 2 and 4: Zwemer and Bajaj 2008 (Frontiers Workshop)
37
Examples
[3]
[1]
[4]
[2]
38
Composable Object (COB) Views for Sample Problems
(3) Airframe structural part design
(4) Multi-year financial projection model
(b) Parametric graph view
(a) Next-gen spreadsheet view
(2) Road scanning UAV system
2009-01 – www.InterCAX.com and www.msl.gatech.edu
39
bdd [package] springSystems [Analytical spring tutorial]
Spring
System
Example
par [block] LinearSpring [Definition view]
r3: ForceEqn
«abb»
TwoSpringSystem
{F = k * dL}
springConstant:
values
k:
force:
F:
dL:
deformation1: DistanceMeasure
deformation2: DistanceMeasure
load: ForceMeasure
totalElongation:
r2: deltaLengthEqn
spring1
{dL = L – L0}
spring2
dL:
«abb»
LinearSpring
L:
L0:
length:
L
L
Lo
F
x1
k
deformed state
x2
F
values
undeformedLength:
undeformedLength: LengthMeasure
springConstant: ForcePerLengthMeasure
start: DistanceMeasure
end: DistanceMeasure
length: DistanceMeasure
totalElongation: DistanceMeasure
force: ForceMeasure
r1: LengthEqn
{L = x2 – x1}
start:
r1 : L x2 x1
r2 : L L L0
x1:
L:
x2:
end:
(a) Analytical springs tutorial block definition diagram.
(b) LinearSpring parametric diagram.
r3 : F kL
k1
k2
par [block] TwoSpringSystem [Definition view]
P
u1
bc3:
spring1: LinearSpring
SysML
Diagrams
spring2: LinearSpring
springConstant: N/mm = 5.50
springConstant: N/mm = 6.00
force:
undeformedLength: mm = 8.00
force:
undeformedLength: mm = 8.00
totalElongation:
start: = 0
load:
bc6: u2Eqn
length:
length:
end:
bc2:
bc4:
totalElongation:
start:
end:
u2
bc5:
(c) TwoSpringSystem parametric diagram.
{u2 = dL2 – u1}
dL2:
u2:
u1:
deformation2:
deformation1:
40
[1] Spring System: Flattened Graph
[SysML constraint property
name annotations]
bc4
spring1.r3
bc3
spring2.r3
bc6
spring1.r2
bc5
spring2.r2
spring1.r1
bc2
spring2.r1
41
Traditional Mathematical Representation
Tutorial: Two Spring System
System Figure
k1
k2
P
u1
u2
Free Body Diagrams
L2
L1
L1
L10
F1
x11
Kinematic Relations
Constitutive Relations
k1
x12
F1
L2
L20
F2
x21
k2
x22
F2
Variables and Relations
r11 : L1 x12 x11
bc1 : x11 0
r12 : L1 L1 L10
bc2 : x12 x21
r13 : F1 k1L1
bc3 : F1 F2
r21 : L2 x22 x21
bc4 : F2 P
r22 : L2 L2 L20
bc5 : u1 L1
r23 : F2 k 2 L2
bc6 : u2 L2 u1
Boundary Conditions
42
TwoSpringSystem parametric diagram –
sample instance
par [block] TwoSpringSystem370 [Instance view]
bc3:
spring1: LinearSpring420
spring2: LinearSpring430
springConstant:
N/mm = 5.50
springConstant:
N/mm = 6.00
force:
undeformedLength:
mm = 8.00
totalElongation:
force:
undeformedLength:
mm = 8.00
totalElongation:
start: = 0
start:
bc4:
load: N = 10.0
bc6: u2Eqn
length:
length:
end:
State 1.0 - unsolved
end:
{u2 = dL2 – u1}
dL2:
u2:
u1:
deformation2:
=?
bc5:
bc2:
deformation1: = ?
bc3:
spring1: LinearSpring420
springConstant:
N/mm = 5.50
force:
N = 10.0
undeformedLength:
mm = 8.00
totalElongation:
mm = 1.82
start: = 0
end:
mm = 9.82
length:
mm = 9.82
bc2:
spring2: LinearSpring430
springConstant:
N/mm = 6.00
force:
N = 10.0
undeformedLength:
mm = 8.00
totalElongation:
start:
mm = 9.82
end:
mm = 19.5
bc5:
mm = 1.67
length:
mm = 9.67
State 1.1 - solved
bc4:
load: N = 10.0
bc6: u2Eqn
{u2 = dL2 – u1}
dL2:
u2:
u1:
deformation2:
mm = 3.49
deformation1: mm = 1.82
43
Example COB instance: two_spring_system
example 2, state 1.0 (unsolved)
(a) Lexical
COB instance
as XML (CXI)
(b) Parametrics execution in XaiTools
<linear_spring loid="_15">
<undeformed_length causality="given">8.0</undeformed_length>
<spring_constant causality="given">5.5</spring_constant>
</linear_spring>
<linear_spring loid="_25">
<undeformed_length causality="given">8.0</undeformed_length>
<spring_constant causality="given">6.0</spring_constant>
</linear_spring>
example 2, state 1.1 (solved)
<two_spring_system loid="_3">
<spring1 ref="_15"/>
<spring2 ref="_25"/>
<deformation1 causality="target"/>
<deformation2 causality="target"/>
<load causality="given">10.0</load>
</two_spring_system>
44
Phase 2 Work-In-Process
[selected topics]
• SysML parametrics and solvers
• SysML-Modelica interoperability [WIP]
– Generalized mapping underway
– Contact Chris Paredis for further information
• Mobile robots demonstration platform
45
Phase 2 Work-In-Process
[selected topics]
• SysML parametrics and solvers
• SysML-Modelica interoperability
• Mobile robots demonstration platform
46
SysML and Mobile Robotic Systems:
A Research Testbed and Educational Platform
Status Update
R Peak, B Wilson, et al.
2009-02-02
• Background & Objectives
• Domain SysML model (WIP)
• Demonstration
47
Institute for Personal Robots in Education
(IPRE) — http://www.roboteducation.org/
48
Background
• Leveraging Institute for Personal Robots in
Education (IPRE) — http://www.roboteducation.org/
– Multi-university/corporation educational environment
– Ex. Used in intro comp sci course @ GIT (CS1301)
• Key elements
– Mobile robots: IPRE Scribbler, Roomba, SRV-1
• Sensors, cameras, Bluetooth, firmware, PCB ECAD, ...
– Mobile robotics s/w platform: Myro (Python)
• Primitive operations ... image processing, intro ~AI, ...
– Domain context
• Multi-unit systems, command & control, reusability, ...
• Low-cost and open (non-proprietary)
49
Objectives—Big Picture
• Research & demonstration testbed
[achieve MSI Team Phase 2 objectives ...]
– System run-time operation aided by SysML
– Embedded software / firmware
• Hardware-software relations, real-time factors, ...
– Executable SysML across multiple constructs
• Activities, parametrics, state machines ...
– Misc: instance levels, versioning/config mgt.
• SysML education platform
– Usage in hands-on courses
(industry short courses, university courses, ...)
– Model it and run it!
50
MBSE Challenge Team Objectives
Phase 2: 2008-2009
= primary Phase 2 aspects addressed by mobile robotics testbed
Specific Objectives
1. Extend modeling & simulation interoperability method: MIM 2.0
1. Generalizations: graph transformations, variable topology, reusability,
parametrics 2.x, trade study support, inconsistency mgt., E/MBOM
extensions, method workflow, ...
2. Specializations: software, closed-loop control, electronics, ...
3. Interfaces to new tools: Matlab/Simulink, ECAD, Arena, ...
2. Refine SysML and tool requirements to support MIM 2.0
1. Provide feedback to vendors and OMG SysML 1.2/2.x task forces
3. Demonstrate extensions in updated testbed
4. Define deployment plan and initiate execution
5. Refine roadmap beyond Phase 2
51
Objectives—Near-Term
• Get basic infrastructure in place
– Prototyping (executable activity basics)
– Familiarity with IPRE environment (and beyond)
• Determine what is feasible longer term
• Develop draft domain SysML model
• Update big picture objectives and proceed
52
Scribbler / Myro Demo
Executable SysML Activity Model [1 - original]
53
Scribbler / Myro Demo
Executable SysML Activity Model [2 - after interactive update]
54
Scribbler / Myro Demo
Executable SysML Activity Model [activity building blocks]
55
Contents
• Phase 1 Overview and Results
– From August 2007 to August 2008
• Phase 2 Progress
– From August 2008 to August 2009
• Summary
56
Modeling & Simulation Interoperability
Primary Impacts
Enabling Capabilities
Increased Knowledge
Capture & Completeness
Increased
Modularity & Reusability
Increased
Traceability
Reduced
Manual Re-Creation
Increased
& Data Entry Errors
Automation
Reduced
Modeling Effort
Increased
Analysis Intensity
Reduced
Time
Reduced
Cost
Reduced
Risk
Increased
Understanding
Increased
Corporate Memory
Increased Artifact
Performance
Benefits of SysML-based Approach
■
■
■
■
■
■
■
■
■
■
■
■
■
■
■
■
■
■
■
■
Precision Knowledge
for the
Model-Based Enterprise
■
■
57
MBSE Challenge Team
Mechatronics / Model Interoperability
Open “Call for Participation”
• Systems engineering drivers in commercial settings
– Increased system complexity
– Cross-disciplinary communication/coordination
• Enhancement possibilities based on interest
– Other demonstration examples and testbeds
– Interoperability testing between SysML tools
– Shared models and libraries
• Primary contacts
– Russell Peak [Russell.Peak @ gatech.edu]
– Sandy Friedenthal [sanford.friedenthal @ lmco.com]
– Roger Burkhart [BurkhartRogerM @ JohnDeere.com]
Page 58
Related Resources
SysML Parametrics—Suggested Starting Points
Introductory Papers/Tutorials
•
Peak RS, Burkhart RM, Friedenthal SA, Wilson MW, Bajaj M, Kim I (2007) Simulation-Based Design Using SysML—Part 1: A Parametrics
Primer. INCOSE Intl. Symposium, San Diego. [Provides tutorial-like introduction to SysML parametrics.]
http://eislab.gatech.edu/pubs/conferences/2007-incose-is-1-peak-primer/
•
Peak RS, Burkhart RM, Friedenthal SA, Wilson MW, Bajaj M, Kim I (2007) Simulation-Based Design Using SysML—Part 2: Celebrating
Diversity by Example. INCOSE Intl. Symposium, San Diego. [Provides tutorial-like introduction on using SysML for modeling & simulation,
including the MRA method for creating parametric simulation templates that are connected to design models.]
http://eislab.gatech.edu/pubs/conferences/2007-incose-is-2-peak-diversity/
Example Applications
•
Peak RS, Burkhart RM, Friedenthal SA, Paredis CJJ, McGinnis LF (2008) Integrating Design with Simulation & Analysis Using SysML—
Mechatronics/Interoperability Team Status Report. Presentation to INCOSE MBSE Challenge Team, Utrecht, Holland.
[Overviews modeling & simulation interoperability (MSI) methodology progress in the context of an excavator testbed.]
http://eislab.gatech.edu/pubs/seminars-etc/2008-06-incose-is-mbse-mechatronics-msi-peak/
•
Peak RS (2007) Leveraging Templates & Processes with SysML. Invited Presentation. Developing a Design/Simulation Framework: A
Workshop with CPDA's Design and Simulation Council, Atlanta. [Includes applications to automotive steering wheel systems and FEA
simulation templates.] http://eislab.gatech.edu/pubs/conferences/2007-cpda-dsfw-peak/
Commercial Tools and Other Examples/Tutorials
•
ParaMagic™ plugin for MagicDraw®. Developed by InterCAX LLC (a Georgia Tech spin-off) [1]. Available at www.MagicDraw.com.
•
Zwemer DA and Bajaj M (2008) SysML Parametrics and Progress Towards Multi-Solvers and Next-Generation Object-Oriented
Spreadsheets. Frontiers in Design & Simulation Workshop, Georgia Tech PSLM Center, Atlanta. [Highlights techniques for executing SysML
parametrics based on the ParaMagic™ plugin for MagicDraw®. Includes UAV and financial systems examples.]
http://www.pslm.gatech.edu/events/frontiers/
See slides below for additional references and resources.
[1] Full disclosure: InterCAX LLC is a spin-off company originally created to commercialize technology from RS Peak’s GIT group. GIT has licensed technology to
InterCAX and has an equity stake in the company. RS Peak is one of several business partners in InterCAX. Commercialization of the SysML/composable object
aspects is being fostered by the GIT VentureLab incubator program (www.venturelab.gatech.edu) via an InterCAX VentureLab project initiated October 2007.
60
MBX/SysML-Related Efforts at Georgia Tech
• SysML Focus Area web page
– http://www.pslm.gatech.edu/topics/sysml/
– Includes links to publications, applications,
projects, examples, courses, commercialization, etc.
– Frontiers 2008 workshop on MBSE/MBX, SysML, ...
• Selected projects
–
–
–
–
–
Deere: System dynamics (fluid power, ...)
Lockheed: System design & analysis integration
NASA: Enabling technology (SysML, ...)
NIST: Design-analysis interoperability (DAI)
TRW Automotive: DAI/FEA (steering wheel systems ... )
61
Selected GIT MBX/SysML-Related Publications
Some references are available online at http://www.pslm.gatech.edu/topics/sysml/. See additional slides for selected abstracts.
• Peak RS, Burkhart RM, Friedenthal SA, Paredis CJJ, McGinnis LF (2008) Integrating Design with Simulation & Analysis Using SysML—Mechatronics/Interoperability
Team Status Report. Presentation to INCOSE MBSE Challenge Team, Utrecht, Holland. [Overviews modeling & simulation interoperability (MSI) methodology
progress in the context of an excavator testbed.] http://eislab.gatech.edu/pubs/seminars-etc/2008-06-incose-is-mbse-mechatronics-msi-peak/
• McGinnis, Leon F., "IC Factory Design: The Next Generation," e-Manufacturing Symposium, Taipei, Taiwan, June 13, 2007. [Presents the concept of model-based
fab design, and how SysML can enable integrated simulation.]
• Kwon, Ky Sang, and Leon F. McGinnis, "SysML-based Simulation Framework for Semiconductor Manufacturing," IEEE CASE Conference, Scottsdale, AZ,
September 22-25, 2007. [Presents some technical details on the use of SysML to create formal generic models (user libraries) of fab structure, and how these formal
models can be combined with currently available data sources to automatically generate simulation models.]
• Huang, Edward, Ramamurthy, Randeep, and Leon F. McGinnis, "System and Simulation Modeling Using SysML," 2007 Winter Simulation Conference, Washington,
DC. [Presents some technical details on the use of SysML to create formal generic models (user libraries) of fab structure, and how these formal models can be
combined with currently available data sources to automatically generate simulation models.]
• McGinnis, Leon F., Edward Huang, Ky Sang Kwon, Randeep Ramamurthy, Kan Wu, "Real CAD for Facilities," 2007 IERC, Nashville, TN. [Presents concept of using
FactoryCAD as a layout authoring tool and integrating it, via SysML with eM-Plant for automated fab simulation model generation.]
• T.A. Johnson, J.M. Jobe, C.J.J. Paredis, and R. Burkhart "Modeling Continuous System Dynamics in SysML," in Proceedings of the 2007 ASME International
Mechanical Engineering Congress and Exposition, paper no. IMECE2007-42754, Seattle, WA, November 11-15, 2007. [Describes how continuous dynamics models
can be represented in SysML. The approach is based on the continuous dynamics language Modelica.]
• T.A. Johnson, C.J.J. Paredis, and R. Burkhart "Integrating Models and Simulations of Continuous Dynamics into SysML," in Proceedings of the 6th International
Modelica Conference, March 3-4, 2008. [Describes how continuous dynamics models and simulations can be used in the context of engineering systems design
within SysML. The design of a car suspension modeled as a mass-spring-damper system is used as an illustration.]
• C.J.J. Paredis "Research in Systems Design: Designing the Design Process," IDETC/CIE 2007, Computers and Information in Engineering Conference -- Workshop
on Model-Based Systems Development, Las Vegas, NV, September 4, 2007. [Presents relationship between SysML and the multi-aspect component model method.]
• Peak RS, Burkhart RM, Friedenthal SA, Wilson MW, Bajaj M, Kim I (2007) Simulation-Based Design Using SysML—Part 1: A Parametrics Primer. INCOSE Intl.
Symposium, San Diego. [Provides tutorial-like introduction to SysML parametrics.]
• Peak RS, Burkhart RM, Friedenthal SA, Wilson MW, Bajaj M, Kim I (2007) Simulation-Based Design Using SysML—Part 2: Celebrating Diversity by Example.
INCOSE Intl. Symposium, San Diego. [Provides tutorial-like introduction on using SysML for modeling & simulation, including the MRA method for creating parametric
simulation templates that are connected to design models.]
• Peak RS (2007) Leveraging Templates & Processes with SysML. Invited Presentation. Developing a Design/Simulation Framework: A Workshop with CPDA's Design
and Simulation Council, Atlanta. [Includes applications to automotive steering wheel systems and FEA simulation templates.]
http://eislab.gatech.edu/pubs/conferences/2007-cpda-dsfw-peak/
• Bajaj M, Peak RS, Paredis CJJ (2007) Knowledge Composition for Efficient Analysis Problem Formulation, Part 1: Motivation and Requirements. DETC2007-35049,
Proc ASME CIE Intl Conf, Las Vegas. [Introduces the knowledge composition method (KCM), which addresses design-simulation integration for variable topology
problems.]
• Bajaj M, Peak RS, Paredis CJJ (2007) Knowledge Composition for Efficient Analysis Problem Formulation, Part 2: Approach and Analysis Meta-Model. DETC200735050, Proc ASME CIE Intl Conf, Las Vegas. [Elaborates on the KCM approach, including work towards next-generation analysis/simulation building blocks
(ABBs/SBBs).]
62
Integrating Design with Simulation & Analysis Using SysML—
Mechatronics/Interoperability Team Status Report
Abstract
This presentation overviews work-in-progress experiences and lessons learned from an excavator testbed that
interconnects simulation models with associated diverse system models, design models, and manufacturing models. The
goal is to enable advanced model-based systems engineering (MBSE) in particular and model-based X1 (MBX) in
general. Our method employs SysML as the primary technology to achieve multi-level multi-fidelity interoperability, while
at the same time leveraging conventional modeling & simulation tools including mechanical CAD, factory CAD,
spreadsheets, math solvers, finite element analysis (FEA), discrete event solvers, and optimization tools. This work is
currently sponsored by several organizations (including Deere and Lockheed) and is part of the Mechatronics &
Interoperability Team in the INCOSE MBSE Challenge.
Citation
Peak RS, Burkhart RM, Friedenthal SA, Paredis CJJ, McGinnis LF (2008) Integrating Design with Simulation & Analysis
Using SysML—Mechatronics/Interoperability Team Status Report. Presentation to INCOSE MBSE Challenge Team,
Utrecht, Holland. http://eislab.gatech.edu/pubs/seminars-etc/2008-06-incose-is-mbse-mechatronics-msi-peak/
[1] The X in MBX includes engineering (MBE), manufacturing (MBM), and potentially other scopes and contexts such as
model-based enterprises (MBE).
63
Simulation-Based Design Using SysML
Part 1: A Parametrics Primer
Part 2: Celebrating Diversity by Example
OMG SysML™ is a modeling language for specifying, analyzing, designing,
and verifying complex systems. It is a general-purpose graphical modeling
language with computer-sensible semantics. This Part 1 paper and its Part
2 companion show how SysML supports simulation-based design (SBD) via
tutorial-like examples. Our target audience is end users wanting to learn
about SysML parametrics in general and its applications to engineering
design and analysis in particular. We include background on the
development of SysML parametrics that may also be useful for other
stakeholders (e.g, vendors and researchers).
In Part 1 we walk through models of simple objects that progressively
introduce SysML parametrics concepts. To enhance understanding by
comparison and contrast, we present corresponding models based on
composable objects (COBs). The COB knowledge representation has
provided a conceptual foundation for SysML parametrics, including
executability and validation. We end with sample analysis building blocks
(ABBs) from mechanics of materials showing how SysML captures
engineering knowledge in a reusable form. Part 2 employs these ABBs in a
high diversity mechanical example that integrates computer-aided design
and engineering analysis (CAD/CAE).
The object and constraint graph concepts embodied in SysML
parametrics and COBs provide modular analysis capabilities based on
multi-directional constraints. These concepts and capabilities provide a
semantically rich way to organize and reuse the complex relations and
properties that characterize SBD models. Representing relations as noncausal constraints, which generally accept any valid combination of inputs
and outputs, enhances modeling flexibility and expressiveness. We
envision SysML becoming a unifying representation of domain-specific
engineering analysis models that include fine-grain associativity with other
domain- and system-level models, ultimately providing fundamental
capabilities for next-generation systems lifecycle management.
These two companion papers present foundational principles of
parametrics in OMG SysML™ and their application to simulation-based
design. Parametrics capabilities have been included in SysML to support
integrating engineering analysis with system requirements, behavior, and
structure models. This Part 2 paper walks through SysML models for a
benchmark tutorial on analysis templates utilizing an airframe system
component called a flap linkage. This example highlights how engineering
analysis models, such as stress models, are captured in SysML, and then
executed by external tools including math solvers and finite element
analysis solvers.
We summarize the multi-representation architecture (MRA) method and
how its simulation knowledge patterns support computing environments
having a diversity of analysis fidelities, physical behaviors, solution
methods, and CAD/CAE tools. SysML and composable object (COB)
techniques described in Part 1 together provide the MRA with graphical
modeling languages, executable parametrics, and reusable, modular, multidirectional capabilities.
We also demonstrate additional SysML modeling concepts, including
packages, building block libraries, and requirements-verification-simulation
interrelationships. Results indicate that SysML offers significant promise as
a unifying language for a variety of models-from top-level system models to
discipline-specific leaf-level models.
Citation
Peak RS, Burkhart RM, Friedenthal SA, Wilson MW, Bajaj M, Kim I
(2007) Simulation-Based Design Using SysML. INCOSE Intl. Symposium,
San Diego.
Part 1: A Parametrics Primer
http://eislab.gatech.edu/pubs/conferences/2007-incose-is-1-peak-primer/
Part 2: Celebrating Diversity by Example
http://eislab.gatech.edu/pubs/conferences/2007-incose-is-2-peak-diversity/
64
Composable Objects (COB) Requirements & Objectives
Abstract
This document formulates a vision for advanced collaborative engineering environments (CEEs) to aid in the design,
simulation and configuration management of complex engineering systems. Based on inputs from experienced Systems
Engineers and technologists from various industries and government agencies, it identifies the current major challenges
and pain points of Collaborative Engineering. Each of these challenges and pain points are mapped into desired
capabilities of an envisioned CEE System that will address them.
Next, we present a CEE methodology that embodies these capabilities. We overview work done to date by GIT on the
composable object (COB) knowledge representation as a basis for next-generation CEE systems. This methodology
leverages the multi-representation architecture (MRA) for simulation templates, the user-oriented SysML standard for
system modeling, and standards like STEP AP233 (ISO 10303-233) for enhanced interoperability. Finally, we present
COB representation requirements in the context of this CEE methodology. In this current project and subsequent phases
we are striving to fulfill these requirements as we develop next-generation COB capabilities.
Citation
DR Tamburini, RS Peak, CJ Paredis, et al. (2005) Composable Objects (COB) Requirements & Objectives v1.0.
Technical Report, Georgia Tech, Atlanta. http://eislab.gatech.edu/projects/nasa-ngcobs/
Associated Project
The Composable Object (COB) Knowledge Representation: Enabling Advanced Collaborative Engineering Environments
(CEEs). http://eislab.gatech.edu/projects/nasa-ngcobs/
65
Leveraging Simulation Templates & Processes with SysML
Applications to CAD-FEA Interoperability
Abstract
SysML holds the promise of leveraging generic templates and processes across design and simulation. Russell Peak
joins us to give an update on the latest efforts at Georgia Tech to apply this approach in various domains, including
specific examples with a top-tier automotive supplier. Learn how you too may join this project and implement a similar
effort within your own company to enhance modularity and reusability through a unified method that links diverse models.
Russell will also highlight SysML’s parametrics capabilities and usage for physics-based analysis, including integrated
CAD-CAE and simulation-based requirements verification. Go to www.omgsysml.org for background on SysML—a
graphical modeling language based on UML2 for specifying, designing, analyzing, and verifying complex systems.
Speaker Biosketch
Russell S. Peak focuses on knowledge representations that enable complex system interoperability and simulation
automation. He originated composable objects (COBs), the multi-representation architecture (MRA) for CAD-CAE
interoperability, and context-based analysis models (CBAMs)—a simulation template knowledge pattern that explicitly
captures design-analysis associativity. This work has provided the conceptual foundation for SysML parametrics and its
validation.
He teaches this and related material, and is principal investigator on numerous research projects with sponsors
including Boeing, DoD, IBM, NASA, NIST, Rockwell Collins, Shinko Electric, and TRW Automotive. Dr. Peak joined the
GIT research faculty in 1996 to create and lead a design-analysis interoperability thrust area. Prior experience includes
business phone design at Bell Laboratories and design-analysis integration exploration as a Visiting Researcher at
Hitachi in Japan.
Citation
RS Peak (2007) Leveraging Simulation Templates & Processes with SysML: Applications to CAD-FEA Interoperability.
Developing a Design/Simulation Framework, CPDA Workshop, Atlanta.
http://eislab.gatech.edu/pubs/conferences/2007-cpda-dsfw-peak/
66