used to cook Infrared - “heat waves” Visible Light
advertisement

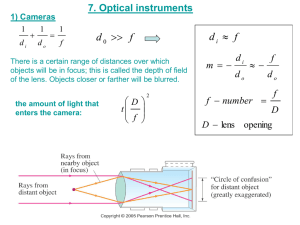
Basic Principles of Imaging and Lenses Light Electromagnetic Radiation Photons Light These three are the same… • Light * pure energy • Electromagnetic Waves * energy-carrying waves emitted by vibrating electrons • Photons * particles of light EM Radiation Travels as a Wave c = 3 x 108 m/s EM Radiation Carries Energy • Quantum mechanics tells us that for photons E = hf where E is energy and h is Planck’s constant. • But f = c/l • Putting these equations together, we see that E = hc/l Electromagnetic Wave Velocity • The speed of light is the same for all seven forms of light. • It is 300,000,000 meters per second or 186,000 miles per second. The Electromagnetic Spectrum • • • • • • • Radio Waves - communication Microwaves - used to cook Infrared - “heat waves” Visible Light - detected by your eyes Ultraviolet - causes sunburns X-rays - penetrates tissue Gamma Rays - most energetic The Multi-Wavelength Sun X-Ray UV Composite Infrared Visible Radio EM Spectrum Relative Sizes The Visible Spectrum Light waves extend in wavelength from about 400 to 700 nanometers. Transparent Materials Transparent - the term applied to materials through which light can pass in straight lines. Opaque Materials Opaque - the term applied to materials that absorb light. • Are clouds transparent or opaque to visible light? – Answer: opaque • Are clouds transparent or opaque to ultraviolet light? – Answer: almost transparent Special Things About a Light Wave • It does not need a medium through which to travel • It travels with its highest velocity in a vacuum • Its highest velocity is the speed of light, c, equal to 300,000 km/sec • The frequency (or wavelength) of the wave determines whether we call it radio, infrared, visible, ultraviolet, X-ray or gamma-ray. A Brief History of Images Camera Obscura, Gemma Frisius, 1558 1544 Camera Obscura "When images of illuminated objects ... penetrate through a small hole into a very dark room ... you will see [on the opposite wall] these objects in their proper form and color, reduced in size ... in a reversed position, owing to the intersection of the rays". Da Vinci http://www.acmi.net.au/AIC/CAMERA_OBSCURA.html (Russell Naughton) Slide credit: David Jacobs A Brief History of Images Lens Based Camera Obscura, 1568 1558 1568 Jetty at Margate England, 1898. http://brightbytes.com/cosite/collection2.html (Jack and Beverly Wilgus) Slide credit: David Jacobs A Brief History of Images 1558 1568 1837 Still Life, Louis Jaques Mande Daguerre, 1837 A Brief History of Images 1558 1568 1840? Abraham Lincoln? A Brief History of Images 1558 1568 1837 Silicon Image Detector, 1970 1970 A Brief History of Images 1558 1568 1837 Digital Cameras 1970 1995 A Brief History of Images 1558 1568 1837 Hasselblad HD2-39 1970 1995 2006 Geometric Optics and Image Formation TOPICS TO BE COVERED : 1) Pinhole and Perspective Projection 2) Image Formation using Lenses 3) Lens related issues Pinhole Cameras • • • Pinhole camera - box with a small hole in it Image is upside down, but not mirrored left-to-right Question: Why does a mirror reverse left-to-right but not top-to-bottom? Pinhole and the Perspective Projection Is an image being formed on the screen? (x,y) YES! But, not a “clear” one. screen scene image plane r ( x, y , z ) y optical axis effective focal length, f’ z pinhole x r ' ( x' , y ' , f ' ) r' r f' z x' x f' z y' y f' z Magnification y f’ optical axis d’ image plane B’ A z x planar scene A' ( x' , y ' , f ' ) B' ( x'x' , y 'y ' , f ' ) y' y f' z x'x' x x f' z A( x, y, z ) B( x x, y y, z ) Pinhole A’ From perspective projection: x' x f' z d B Magnification: d' m d y 'y ' y y f' z (x' ) 2 (y ' ) 2 (x) 2 (y ) 2 Areaimage Areascene m2 f' z Properties of Projection • • • • • Points project to points Lines project to lines Planes project to the whole or half image Angles are not preserved Degenerate cases – Line through focal point projects to a point. – Plane through focal point projects to line Distant Objects are Smaller Size is inversely proportional to distance. Note that B’ and C’ labels should be switched. Parallel Lines Meet Common to draw film plane in front of the focal point. Moving the film plane merely scales the image. Vanishing Points • Each set of parallel lines meets at a different point – • The vanishing point for this direction Sets of parallel lines on the same plane lead to collinear vanishing points. – The line is called the horizon for that plane • Good ways to spot faked images – – – scale and perspective don’t work vanishing points behave badly supermarket tabloids are a great source. Model 0: Pinhole Projection The Equation of Pinhole Projection • Cartesian coordinates: – We have, by similar triangles, that (x, y, z) -> (f x/z, f y/z, f) [multiply by f/z] – Ignore the third coordinate, and get x y (x, y, z) ( f , f ) z z 3D object point 2D image point Model 1: Weak Perspective Projection • Issue – Perspective effects, but not over the scale of individual objects – Collect points into a group at about the same depth, then divide each point by the depth of its group – Advantage: EASY – Disadvantage: WRONG The Equation of Weak Perspective ( x, y , z ) s ( x, y ) • s is constant for all points. • Parallel lines no longer converge, they remain parallel. Slide credit: David Jacobs Model 2: Orthographic Projection Magnification: x' m x y' m y When m = 1, we have orthographic projection r ( x, y , z ) r ' ( x' , y ' , f ' ) optical axis y z x z z image plane This is possible only when z z In other words, the range of scene depths is assumed to be much smaller than the average scene depth. But, how do we produce non-inverted images? Pros and Cons of These Models • Weak perspective has simpler math. – Accurate when object is small and distant. – Most useful for recognition. • Pinhole perspective much more accurate for scenes. – Used in structure from motion. • When accuracy really matters, we must model the real camera – Use perspective projection with other calibration parameters (e.g., radial lens distortion) Slide credit: David Jacobs Problems with Pinholes • Pinhole size (aperture) must be “very small” to obtain a clear image. • However, as pinhole size is made smaller, less light is received by image plane. • If pinhole is comparable to wavelength of incoming light, DIFFRACTION effects blur the image! • Sharpest image is obtained when: pinhole diameter d 2 f 'l Example: If f’ = 50mm, l = 600nm (red), d = 0.36mm The Reason for Lenses Image Formation using (Thin) Lenses • Lenses are used to avoid problems with pinholes. • Ideal Lens: Same projection as pinhole but gathers more light! o i P P’ f Gaussian Lens Formula: 1 1 1 i o f • f is the focal length of the lens – determines the lens’s ability to bend (refract) light • f different from the effective focal length f’ discussed before! Focus and Defocus aperture Blur Circle, aperture diameter b d o i i' Gaussian Law: 1 1 1 i o f o' 1 1 1 i ' o' f Blur Circle Diameter : (i 'i) b f f (o o' ) (o' f ) (o f ) d (i ' i ) i' Depth of Field: Range of object distances over which image is sufficiently well focused, i.e., range for which blur circle is less than the resolution of the imaging sensor. Problems with Lenses Compound (Thick) Lens Vignetting B L3 L2 L1 principal planes A nodal points thickness Chromatic Abberation more light from A than B ! Radial and Tangential Distortion ideal FB FG FR actual ideal actual image plane Lens has different refractive indices for different wavelengths. Spherical Aberration Spherical lenses are the only easy shape to manufacture, but are not correct for perfect focus. Two Lens System d object final image f2 i2 o2 i1 f1 o1 image plane intermediate virtual image lens 2 lens 1 • Rule : Image formed by first lens is the object for the second lens. • Main Rays : Ray passing through focus emerges parallel to optical axis. Ray through optical center passes un-deviated. • Magnification: m i2 i1 o2 o1 Exercises: What is the combined focal length of the system? What is the combined focal length if d = 0? Lens systems • A good camera lens may contain 15 elements and cost a many thousand dollars • The best modern lenses may contain aspherical elements Insect Eye We make cameras that act “similar” to the human eye Fly Mosquito Human Eye • The eye has an iris like a camera • Focusing is done by changing shape of lens • Retina contains cones (mostly used) and rods (for low light) • The fovea is small region of high resolution containing mostly cones • Optic nerve: 1 million flexible fibers http://www.cas.vanderbilt.edu/bsci111b/eye/human-eye.jpg Slide credit: David Jacobs Human Eye • Rods – Intensity only – Essentially night vision and peripheral vision only – Since we are trying to fool the center of field of view of human eye (under well lit conditions) we ignore rods Human Eye • Cones – Three types perceive different portions of the visible light spectrum Human Eye • Because there are only 3 types of cones in human eyes, we only need 3 stimulus values to fool the human eye – Note: Chickens have 4 types of cones Human Eye vs. the Camera • We make cameras that act “similar” to the human eye CCD Cameras http://huizen.ddsw.nl/bewoners/maan/imaging/camera/ccd1.gif Slide credit: David Jacobs