Poster
advertisement

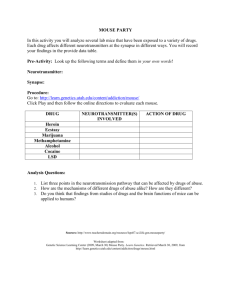
Ohio Northern University Micromouse Spencer Cupp, Kiel Wood, advisor Dr. Khalid Al- Olimat ECCS Senior Design 2012-2013 IEEE Micromouse Competition Rules Motors Infrared sensor readings do not change linearly with distance to object, and do not function when objects are extremely close IR Sensor Output Voltage vs. Distance to Object 3.5 3 Flooding Algorithm Discrepancies in both the production of the motors and their mounting make them behave differently. Given the same input voltage, each of the motors on the mouse will rotate at a different speed. The difference between the motors is compensated for in the motor control code, passing different voltages to each motor to achieve equal rotation speed, moving the mouse in a straight line. Sensor feedback was also incorporated to direct the mouse back to the center of the path as it veers off course. 2.5 The algorithm begins by assuming that there are no walls, calculating the distance (in number of cells) from each cell in the maze to the center. Right and Left Motor Speeds vs. Input Voltage 2 140 1.5 120 1 100 0.5 0 0 5 10 15 20 Distance to Object (cm) 25 30 35 Motor Speed (RPM) Sensor Output (V) •A Micromouse must be a self-contained robot that can find the shortest path to the center of a maze autonomously within ten minutes •The Maze is a 16 x 16 grid of cells, each 18cm x 18cm, separated by 5cm tall walls which are 1.2 cm thick •Information cannot be fed to the mouse by the user, and the mouse must not damage or alter the maze in any way •Winners will be selected based on the amount of time it takes a mouse to move from the starting cell to the center of the maze. •A mouse may travel from the starting cell to the center as many times as desired within the ten minute timeframe, with the fastest run achieved being its official time Sensors Right Motor RPM 80 60 40 To avoid this cutoff region, sensors were strategically placed such that walls would never be close enough to the sensors to give these readings. Left Motor RPM 20 0 0 1 2 3 4 5 Motor Input Voltage (V) 6 7 As the mouse moves through the maze and learns the locations of walls, it updates the distance calculated for each cell, always moving in a direction it assumes will move it towards the center. 8 Prototype System Overview The mouse consists of: •1 Arduino Uno Microcontroller •1 Arduino Motorshield •2 DC Motors with Encoders •2 Wheels with independent shafts and gear trains •1 Caster •4 Infrared Sensors •1 Lithium Ion Battery and Power Switch Infrared sensors transmit infrared light from one side and receive reflected infrared light on the other, therefore sensors mounted in different orientations will return different readings Mounted Side Sensor Readings: Normal vs Inverted Block Diagram 3 Sensor Voltage (V) 2.5 2 1.5 Normal Sensor Inverted Sensor 1 0.5 0 0 5 10 15 20 Perpendicular Distance from Mouse to Wall (cm) 25 These differences can lead to difficulties in wall-detection, therefore sideways facing sensors were mounted in matching orientation RESEARCH POSTER PRESENTATION DESIGN © 2012 www.PosterPresentations.com After finding the center of the maze, the mouse will continue to look for alternate, possibly shorter, routes between the starting cell and center. Once the mapping is complete, the mouse can simply follow the cell distances in descending order (As traced by the red line below) to reach the center of the maze via the shortest possible route.