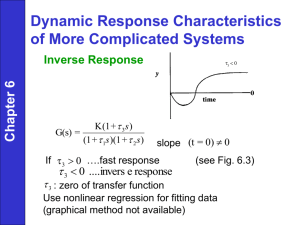
Class 22 Business Road Map for 2nd Order Equations Poles and
advertisement

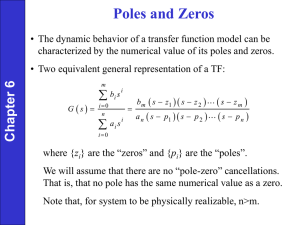
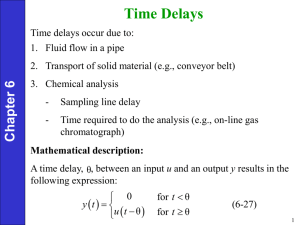
Business • Next HW due Monday with SP10 – Not Friday!!! • Divide into lab groups (of 4) Class 22 – Hand it to the TAs • Sign up for tour of BYU Heating Plant Complicated Transfer Functions – To see process control equipment up close – Class is too big! – This Friday (Oct. 22) • 1 pm • 2 pm • 3 pm Road Map for 2nd Order Equations G (s ) = Standard Form Step Response Sinusoidal Response Other Input Functions (long-time only) (5-63) -Use partial fractions Critically damped ζ=1 (5-50) Underdamped 0<ζ<1 (5-51) What About Higher Order Systems? Overdamped ζ>1 (5-48, 5-49) or 30 s 2 + 6s + 7 G (s ) = 3 24 s + 20 s 2 + 10s + 2 • Transfer function can usually be represented as a ratio of two polynomials in the Laplace variable s along with a possible delay term: where and Z ( s) −θs G ( s) = e P( s) m Z ( s) = bm s + bm−1 s m−1 +...+ b1 s + b0 P( s) = a n s n + a n −1 s n −1 +...+ a1 s + a 0 Roots of Z(s) = “zeros” Roots of P(s) = “poles” A polynomial in the numerator is called a lead element A polynomial in the denominator is called a lag element Method to describe stability behavior of system using simple analysis of transfer function Relationship between OS, P, tr and ζ, τ (pp. 119-120) Poles and Zeros 30 24 s 3 + 20s 2 + 10s + 2 Different Forms of G(s) G ( s) = bm ( s − z1 )( s − z 2 )... ( s − z m ) a n ( s − p1 )( s − p 2 )... ( s − p n ) e −θ s so z1, z2, …, zn are the zeros and p1, p2, …, pn are the poles Alternatively, in time constant form, G ( s) = bm ( − z1 )( − z 2 )... ( − z m )(τ l1 s + 1)(τ l 2 s + 1)... (τ lm s + 1) a n ( − p1 )( − p 2 )... ( − p n )(τ 1 s + 1)(τ 2 s + 1)... (τ n s + 1) =K (τ s + 1)(τ (τ s + 1)(τ l1 l2 1 2 s + 1)... (τ lm s + 1) s + 1)... (τ n s + 1) e −θ s e −θ s n ≥ m to be physically realizable so -1/τl1, -1/τl2, …, -1/τln are the zeros and -1/τ1, -1/τ2, …, -1/τn are the poles 1 So Who Cares? What Do Zeros Tell Us? • Grey area (positive poles) means unstable behavior Imaginary axis Complex conjugate pair of poles -- stable but oscillatory Stable region Unstable region Unstable pole “ka-boom” x x x less oscillations Stable pole very fast time constant x more Stable pole long time constant x • Distance from origin means Real axis – More oscillations (y direction) – Faster response due to shorter time constant (x direction) • Pole on origin means integrating process • Poles on y axis mean pure oscillatory behavior with no exponential damping • Zeros have no effect on system stability. • Zero in right half plane: may result in an inverse response to a step change in the input Chapter 6 • Poles show the stability of the process • Zeros show some dynamics (lead-lag) • Plot poles on real vs imaginary axes with “×” 0 (initially negative) A certain amount of mathematical analysis (see Exercises 6.4, 6.5, and 6.6) will show that there are three types of responses involved here: The response of this system to a step change in input is ⎛ τ −τ ⎞ τ −τ y ( t ) = KM ⎜1 + a 1 e−t / τ1 + a 2 e−t / τ 2 ⎟ τ 2 − τ1 ⎝ τ1 − τ 2 ⎠ ⇒ y Note that y ( t → ∞ ) = KM as expected; hence, the effect of including the single zero does not change the final value nor does it change the number or location of the response modes. But the zero does affect how the response modes (exponential terms) are weighted in the solution, Eq. 6-15. Chapter 6 Chapter 6 Solution axis • Zero in left half plane: may result in “overshoot” during a step response (see Fig. 6.3). (6-14) calculate the response to the step input of magnitude M and plot the results qualitatively. Real Inverse response For the case of a single zero in an overdamped second-order transfer function, K ( τ a s + 1) ( τ1s + 1)( τ2 s + 1) o t Example 6.2 G(s) = Imaginary axis (6-15) Case a: τ a > τ1 Case b: 0 < τ a ≤ τ1 Case c: τa < 0 Example Problem G (s ) = 30 15 15 ⇒ ⇒ (3s + 1)(4 s 2 + 2s + 1) 24 s 3 + 20s 2 + 10s + 2 12 s 3 + 10s 2 + 5s + 1 Chapter 6 Put in pole-zero format: 15 1⎞ ⎛ 1 1⎞ ⎛ 3⎜ s + ⎟4⎜ s 2 + s + ⎟ 3⎠ ⎝ 2 4⎠ ⎝ Convert to sine-cosine form: G (s ) = Inverse Response G (s ) = Find poles: See page 134 for examples of inverse response • Increase of steam to reboiler initially causes frothing/spillage on first trays (-1/3,0) 15 15 = 2 1⎞ ⎛ 1 1⎞ ⎡ ⎤ ⎛ 3⎜ s + ⎟4⎜ s 2 + s + ⎟ 12⎛⎜ s + 1 ⎞⎟ ⎢⎛⎜ s + 1 ⎞⎟ + 3 ⎥ 3⎠ ⎝ 2 4⎠ ⎝ 3 ⎠ ⎣⎢⎝ 4 ⎠ 16 ⎦⎥ ⎝ ⎛ 1 3 ⎞ ⎛ 1 3 ⎜− , ⎟ ⎜ ⎜ 4 4 j⎟ ⎜− 4 , − 4 ⎝ ⎠ ⎝ ⎞ j ⎟⎟ ⎠ 2 Now Plot Example: Problem 6.1 – Exponential decay (good!) 0.4 0.3 0.2 0.1 0 -0.4 -0.3 -0.2 -0.1 • One imaginary conjugate pair -0.1 0 0.7(s 2 + 2 s + 2 ) (s5 + 5s 4 + 2s3 − 4s 2 + 6) G( s) = • All left-hand half 0.5 Find zeros and poles (use Mathcad) 1.5 – Oscillatory behavior Zeros -0.3 -1 -1 0.5 -0.4 Poles Zeros 0 -0.5 -6 -4 -2 0 2 -1 -1.5 Polynomial Approximations to e −θs Pade Approximations theta = 2 Wanted: polynomial approximations to Why: Analysis of transfer functions Two widely used approximations are: Chapter 6 θ 2 s 2 θ3s 3 θ 4 s 4 = 1 − θs + − + +K 2! 3! 4! (6-34) The approximation is obtained by truncating after only a few terms. 2. Padé Approximations: Many approximations are available. For example, the 1/1 approximation is, θ 1− s 2 e − θs ≈ (6-35) θ 1+ s 2 (6-57) (use for numerator terms) • An alternative first-order approximation consists of the transfer function, e −θ0 s = 1 eθ 0 s ≈ 1 1 + θ0 s (6-58) 5 0 -2 -1 -5 0 1 2 s • Time delays are very bad for control because they involve a delay of information • Pade approximation often used when e-θs is in denominator Skogestad’s “half rule” • Skogestad (2002) has proposed a related approximation method for higher-order models that contain multiple time constants. Chapter 6 Chapter 6 • For small values of s, exp(-theta*s) "1/1"Pade "2/2"Pade 10 Implications for Control: Taylor Approximation of Higher-Order Transfer Functions Goal: Approximate high-order transfer function models with lower-order models that have similar dynamic and steadystate characteristics. 15 exp(-theta*s) e − θs : Chapter 6 20 1. Taylor Series Expansion: e −θ0 s ≈ 1 − θ 0 s 1 -1 • Two poles in unstable area (kaboom) • Any input or disturbance action will cause growth beyond bounds -0.5 e 0.000 0.583 0.585 -0.585 -0.583 1 -0.2 − θs Poles -4.345 0.756 -1.083 -1.083 0.756 • He approximates the largest neglected time constant in the following manner. ¾One half of its value is added to the existing time delay (if any) and the other half is added to the smallest retained time constant. ¾Time constants that are smaller than the “largest neglected time constant” are approximated as time delays using (6-58). What does this mean? (use for denominator terms for non-dominant time constants) 3 Example 6.4 Skogestad Revisited Consider a transfer function: (sounds like a movie) G (s) = • Keep it 2. Find 2nd largest time constant (τ2) • • Add half of τ2 to τ1 Add the other half of τ2 to the time delay (in numerator) Chapter 6 1. Find largest time constant (τ1) 3. All other τ’s • K ( −0.1s + 1) ( 5s + 1)( 3s + 1)( 0.5s + 1) (6-59) Derive an approximate first-order-plus-time-delay model, Ke−θs G% ( s ) = τs + 1 using two methods: (6-60) (a) The Taylor series expansions of Eqs. 6-57 and 6-58. Add to time delay (in numerator) (b) Skogestad’s half rule Example please! Compare the normalized responses of G(s) and the approximate models for a unit step input. (b) To use Skogestad’s method, we note that the largest neglected time constant in (6-59) has a value of three. Solution (a) The dominant time constant (τ = 5) is retained. Applying the approximations in (6-57) and (6-58) gives: and (6-61) (numerator) 1 ≈ e −3s 3s + 1 1 ≈ e−0.5 s 0.5s + 1 (6-62) (denominator terms) Substitution into (6-59) gives the Taylor series approximation, G%TS ( s ) : Ke −0.1s e −3s e −0.5s Ke −3.6 s = G%TS ( s ) = 5s + 1 5s + 1 (6-63) Chapter 6 Chapter 6 −0.1s + 1 ≈ e −0.1s G (s) = Ke −2.1s G% Sk ( s ) = 6.5s + 1 Chapter 6 G1(s) Figure 6.10 Comparison of the actual and approximate models for Example 6.4. (6-64) Example: Parallel Processes (6-64) Awesome! I prefer FOPDT (6-59) • According to his “half rule”, half of this value is added to the next largest time constant to generate a new time constant τ = 5 + 0.5(3) = 6.5. • The other half provides a new time delay of 0.5(3) = 1.5. • The approximation of the RHP zero in (6-61) provides an additional time delay of 0.1. • Approximating the smallest time constant of 0.5 in (6-59) by (6-58) produces an additional time delay of 0.5. • Thus the total time delay in (6-60) is, θ = 1.5 + 0.1 + 0.5 = 2.1 and G(s) can be approximated as: and G(s) can be approximated as: Ke −2.1s G% Sk ( s ) = 6.5s + 1 K ( −0.1s + 1) ( 5s + 1)( 3s + 1)( 0.5s + 1) R(s) X(s) + + G2(s) Y(s) Q(s) G1(s) is 1st order G2(s) is 2nd order Skogestad’s method provides better agreement with the actual response. 4 Parallel Process (cont.) Y ( s) = Goverall ( s ) = G1 ( s ) + G2 ( s ) X ( s) Y ( s) K1 K2 = + X ( s ) τ 1s + 1 τ 22 s 2 + 2ζτ 2 s + 1 = K1 (τ 22 s 2 + 2ζτ 2 s + 1) + K 2 (τ 1s + 1) (τ 1s + 1)(τ 22 s 2 + 2ζτ 2 s + 1) = K1τ 22 s 2 + (K 2 + 2ζτ 2 )s + K1 + K 2 (τ 1s + 1)(τ 22 s 2 + 2ζτ 2 s + 1) Now put in standard form: Homework Hint on Prob 6.7 See online hint, because I changed the problem a little bit! Moral: 2 systems in parallel K ′(as 2 + bs + 1) give lead-lag and = (τ 1s + 1)(τ 22 s 2 + 2ζτ 2 s + 1) complicated pole-zero form 5