م ھ
advertisement

Republic of Iraq
Ministry of Higher Education
and Scientific Research
-
University of TechnologyElectromechanical
Department
2014
1435
1. simple pendulum.
2. mass-spring systems.
3. torsional oscillations of a single rotor with viscous damping.
4. forced vibration of rigid body – spring system with negligible damping.
5. forced damping (undamped) vibration.
6. torsional oscillations of two rotor system.
7. critical whirling speed of shaft.
September 14 2014
Lab. of Theory and Vibrations Electromechanical Eng. Dept
Experiment No. (1)
SIMPLE PENDULUM
1.1 Objective
(1) To determine the magnitude of gravitational constant (g).
(2) Determine the natural frequency of oscillation of system.
1.2 Introduction
One of the simplest examples of free vibration with negligible damping is the
simple pendulum. The motion is simple harmonic.
1.3Theory of Experiment
(T
en
sio
n)
T
m
m
m
x
mg
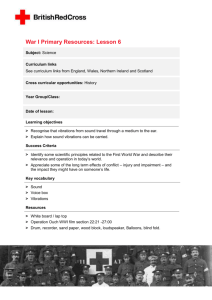
Figure ( 1.1 )
T =Tension in wire.
m=mass of ball.
= wire length.
=acceleration.
[2]
Lab. of Theory and Vibrations Electromechanical Eng. Dept
September 14 2014
g= gravitational constant.
t=periodic time.
( . )=
(P.E)= Potential energy.
.
Displace mass by small angle (5° – 10°) and let free resolve forces (use newton's
second law)
external forces in horizontal direction = mass * acceleration
=m
.……….(1.1)
external forces in vertical direction = 0
=0…….…..(1.2)
Since( ) small ;
=
and
cos =1 and
For (T) from (1.2) into(1.1) will obtain eqt. of motion.
m
+ m g = 0…………..(1.3)
+
= 0 …………..(1.4)
Since harmonic motion , frequency of
=
;
=
Periodic time t =
..….……..(1.5)
=2
…………(1.6)
Or can use energy method to obtain eqt. of motion .
(K.E) Kinetic energy =
(P.E) Potential energy = mg(
cos )
[3]
=
in eqt's (1)&(2) and sub.
September 14 2014
Lab. of Theory and Vibrations Electromechanical Eng. Dept
Use Rayleigh principle or rate change of momentum
( .
+ . )=0
m
+ mgL sin = 0
m
+ mgL = 0
m
+ mgL = 0
+
=0
In this experiment, the object is to analyze the above equation for the periodic time
by varying the length of the pendulum,and timing the oscillations. The
independence of the size of the mass of the particles is demonstrated.
1.4 Apparatus
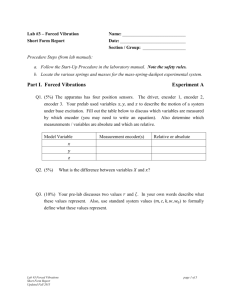
Figure (1.2) shows the following:Sub-frame (cross beam)
(B1)
Small wooden ball
( B2)
Small steel ball
( B3)
1. Inextensible flexible cord
2. Stopwatch or clock
3. Meter rule
Both the steel and the wooden balls attach to lengths of cord approximately one
meter long, each of the two cords suspending from the small chucks at either end of
thesub-frame. You can vary the length by pulling the thread through the chuck and
the hole above the sub-frame.
Sub-frameB1
Inextensible wire
[4]
Steel ball
B3
B2
Wooden ball
September 14 2014
Lab. of Theory and Vibrations Electromechanical Eng. Dept
Frame
Figure (1.2 ) Apparatus of Experiment
1.5 Procedure
Measure and note the lengthL,( the distance from the bottom of the chuck to center
of the ball). Displace the pendulum through a small angle and allow swinging
freely. Once settled measure the time taken for 50 oscillations and record the
periodic time, t.
Repeat the procedure for various values of(L) for both the wooden ball and the
steel ball. Enter the result in table (1.1). Plot a graph for values of against values
of length L.
1.6 Results
Tablet (1.1) Experiment No. 1 Results
LengthL
(m)
Period t
one oscillation
Time for 50 complete
oscillations
steel
wood
steel
[5]
wood
Steel
wood
September 14 2014
Lab. of Theory and Vibrations Electromechanical Eng. Dept
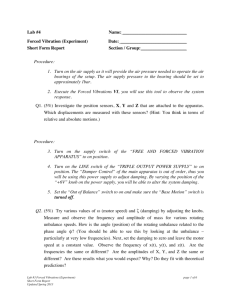
Figure ( 1.3 )
“against
for a simple pendulum”
The graph results in a straight one, giving a relation between (
the form:
Where:Kis a constant equal to
= KL
) and (L) of
(slope of line)
Hence the value of g, the acceleration due to gravity, can be determined, also the
natural frequency of the system can be obtain experimental for different length (L)
and compare with theoretical values for different length.
1.7Discussion of Results
1. What inaccuracies exist in this method for calculating a satisfactory value for
(g)?
2. How can you overcome these inaccuracies?
3. Make a comparative study between theoretical and experimental results.
1.8Conclusions
[6]
September 14 2014
Lab. of Theory and Vibrations Electromechanical Eng. Dept
Experiment No. (2)
MASS - SPRING SYSTEMS
2.1 Object of experiment
1. Determination of helical spring stiffness (K).
2. Determination of natural period of oscillation and obtain natural un damped
frequency.
3. Determination of the effective mass of the spring.
2.2 Introduction
A helical spring, deflecting as a result of applied force, conforms toHooke's Law
(deflection proportional to deflecting force).The graph of force against deflection is
a straight line as shown in.
[7]
September 14 2014
Lab. of Theory and Vibrations Electromechanical Eng. Dept
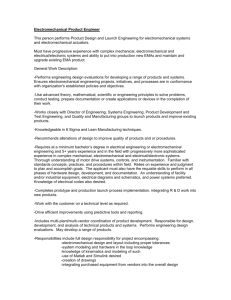
Figure (2.1 )
Slope ofthe line
is the 'deflection coefficient' in meters per Newton. The
reciprocal of this is the stiffness of the spring and is the forcerequired to produce
unit deflection. A rigid body of mass M under elasticrestraint, supported by spring
(S), forms the basis of all analysis of vibrationsin mechanical systems.
2.3 Theory of Experiment
M=mass of system
K=spring stiffness
=natural frequency of system.
T = periodic time .
X = deflection.
G = modulus of rigidity.
D = spring diameter.
R = outer diameter of spring.
N = number of spring turns.
= spring mass.
The governing equation of motion for the spring-mass system can be obtained
using Newton’s force summation method.
[8]
September 14 2014
Lab. of Theory and Vibrations Electromechanical Eng. Dept
external forces = mass * acceleration
K
Externalspring forces
Equilibrium position
x
kx
M
M
M
inertia forces
(a)
(b)
(c)
………….(2.1)
=0
…………(2.2)
Since system perform harmonic force motion , so can obtain the harmonic
oscillating natural frequency .
=
…………(2.3)
And periodic time T = 2
.………..(2.4)
2.4 Apparatus
Figure ( 2.2) shows the required set-up for the experiment. Suspend anyone of the
three helical springs supplied from the upper adjustableassembly ( )and clamp to
the top member of the portal frame.
[9]
September 14 2014
Lab. of Theory and Vibrations Electromechanical Eng. Dept
To the lower end of the spring a rod is bolted and integral platform( ) onto which
an increment of 0.4kgmass may be added. The rod passes through a brassguide
bush, fixed to an adjustable plate ( ), which attaches to the lowermember. A depth
gauge is supplied which, when fitted to the uppreassembly withits movable stem
resting on the top plate of the guide rod, canbe used to measure deflection, and
thereby the stiffness, of a given spring.
Figure ( 2.2 )
2.5 Experiment
( A) (Determination of spring stiffness K)
Fix the specimen spring to the portal frame, with the loadingplatform suspended
underneath and the guide rod passing through the guidebush. Carefully adjust the
system to ensure that the guide bush is directlybelow the top anchorage point,since
any misalignment will produceexperimental errors due to friction. Friction can be
minimized by using greaseor oil around the bush.Using the gauge measure the
length of the spring with the platformunloaded. Add weights in increments taking
note ofthe extension record in Table (2.1),until reaching a suitable maximum load.
Remove the Weights, again notingthe length at each increment, as the system
unloaded. From these valuesdetermine the mean value of extension for the spring.
[10]
September 14 2014
Lab. of Theory and Vibrations Electromechanical Eng. Dept
Table (2.1)
Plot a graph for the extension against load, and from this determinethe spring
stiffness, k.
2.6 Experiment:
(B) Determination of natural period of oscillation then obtain natural
undamped frequency for system.
Add masses-to the platform in varying increments, pull down on theplatform and
release to produce vertical vibrations in the system. For eachincrement of Weight
note the time taken for 20 complete oscillations record in Table (2.2 )and from this
calculate the periodic time, T.
T=2
Theoretically the periodic time , then natural frequency can be obtained , by
calculating the stiffness of spring used from
K=
;
G =modulus of rigidity
[11]
September 14 2014
Lab. of Theory and Vibrations Electromechanical Eng. Dept
Also from known the experimental and theoretical values of natural frequency can
obtain the mass of spring
=
+
Table (2.2)
Mean coil diameter:
Mean wire diameter:
Number of coil:
M (kg)
Time for 20
oscillations
Period T (s) for one
oscillation
0
(
)
0.4
0.8
1.2
1.6
2.0
Note that
=
The mass of the rod and platform are included in (M) above. FromTable (2.2) plot a
graph of T against M and find the slope ofthe graph, Figure (2.4)
2.7 Results
[12]
Lab. of Theory and Vibrations Electromechanical Eng. Dept
September 14 2014
Deflection (mm)
Mass , M (kg)
1.0
3.0
4.0
Figure (2.3) Part A graph
(Square of
periodic time of
one oscillation)
0
1.0
2.0
3.0
4.0
5.0
6.0
Mass , M (kg)
Figure (2.4) Part B graph
From the intercept of the line on the M-axis, the effective mass of thespring can be
found (m). Compare the value of m obtained with thegenerally accepted value, that
is, mass of spring. Repeat the procedurewith the other springs provided.
[13]
September 14 2014
Lab. of Theory and Vibrations Electromechanical Eng. Dept
2.8 Discussion and Conclusions
1. State your conclusions in the light of the results obtained. Has the basic
theory been verified?
2. From the experiments so far performed, discuss the relative merits of each in
calculating an accurate value for (T, ,
). Criteria for your comments
should be:
a) Ease of experimentation.
b) Inherent inaccuracies.
c) Ease of computation.
3. Choosing some typical results, what error is introduced in calculating
(T, ,
)by neglecting the effective mass of the spring also by
considering the spring mass?
[14]
September 14 2014
Lab. of Theory and Vibrations Electromechanical Eng. Dept
Experiment No. (3)
TORSIONAL OSCILLATIONS OF A SINGLE ROTOR WITH
VISCOUS DAMPING
3.1 Object
1.
2.
3.
4.
Determining the damping period of oscillation.
Determining the logarithmic decrement.
Determining the damping coefficient of oil.
Determining how damping coefficient depends on the depth immersion of
the rotor in oil.
3.2 Introduction
In This experiment, the effect of including a damper in a system undergoing
torsional oscillations is investigated. The amount of damping in the system depends
on the extent to which the conical portion of a rotor is exposed to the viscous
effects of a given oil.
3.3 Theory
I = mass moment of inertia.
= angular displacement.
K = shaft stiffness.
C = fluid damping coefficient.
= damping period.
=
The equation of the angular motion is:
.
Which may be written?
+
+
[15]
=0
September 14 2014
Lab. of Theory and Vibrations Electromechanical Eng. Dept
Where: =
=
The angular displacement is:
( )=
Where:(U) and ) are constants
The periodic time is :
cos (
=
+
)
Where: is the damped natural freqancy
Measuring amplitudes on the same side of the near position, the nth oscillation is
=
(
)
Where( ): is a positive integer corresponding to the number of complete
oscillations starting at a convenient datum (t=0)
Putting ( ) =1 gives the logarithmic
Decrement log
3.4 Apparatus
=
. which is required by basic theory.
Figure (3.1) shows the apparatus, and consists of a vertical shaft gripped at is upper
end by a chuck attached to a bracket ( ) and by a similar chuck attached to a
heavy rotor ( ) at its lower end.
[16]
September 14 2014
Lab. of Theory and Vibrations Electromechanical Eng. Dept
Figure (3.1)
The rotor ( ) suspends over a transparent cylindrical container,
, containing
damping oil. The oil container can be raised or lowered by means of knobs on its
underside, allowing the contact area between the oil in the container and the conical
portion of the rotor to vary. This effectively varies the damped torque on the rotor
when the later oscillates. Record damped oscillation traces on paper wrapped round
the drum mounted above the flywheel. Unit( ) consist of a penholder and pen,
which adjust to make proper contact with the paper, the unit undergoes a controlled
descent over the length of the drum by means of an oil dashpot clamped to the
main.
You can use various diameters shafts, but due to the location and necessary fin
adjustment of the oil container the length is restricted to approximately 0.75 m.
Measure the angular displacement of the flywheel by means of a graduated scale on
the upper rim of the rotor. An etched marking on the frame serves as a datum for
the measurement of angular displacement.
3.5 Part A; Determination of Damping Coefficient
Procedures
[17]
Lab. of Theory and Vibrations Electromechanical Eng. Dept
September 14 2014
Fill the cylindrical container K4 with oil to within 10mm of the top.Adjust the
knobs underneath to level the oil surface with one of the upper graduations on the
conical portion of the rotor, K3.A depth, d of 175mm is suggested for maximum
damping. Details of the graduations on the rotor are in Figure(3.2).
d=175
G
d=150
F
E
hi
E
d=100
C
37.5
50.0
C
B
d=50
A
62.5
D
d=75
B
75.0
F
d=125
D
87.5
G
d=25
A
12.5
12.5
Figure(3.2) Conical graduation
All dimensions in (mm)
Select and fit a suitable shaft, noting the length of shaft the two inside faces the
chuck, together with the diameter of the shaft. Allow the pen to fall, and measure
the rate of descent of the pen in ( mm/second) by timing the descent of the pen over a
fixed length of paper, using a stopwatch.
The system is now ready for recording torsional oscillations. Raise the pen to the
top of the paper on the drum and rotate the rotor to an angle of approximately 40 o
and then release. A trace of the oscillations can be obtained by bringing the pen
into contact with the paper using the thumbnut on the support and allowing the pen
to descend.
[18]
September 14 2014
Lab. of Theory and Vibrations Electromechanical Eng. Dept
Figure(3.3)
Record a trace of the amplitude of oscillation showing decay of vibration due to the
damping. The rate of descent of the pen previously carried out will provide suitable
time scale.
From the trace given in Figure(3.3),measure five successive amplitudes starting
with the initial one (n=0) and tabulate the results in Table (3.1) below.
Table (3.1)
Logarithmic decrement
n
(mm)
( ) =
[19]
Damping factors
September 14 2014
0
1
2
3
4
5
Lab. of Theory and Vibrations Electromechanical Eng. Dept
=
=
=
=
=
=
3.6 Part B;
Investigation of How TheDamping Coefficient Depends on The
Depth of Immersion of The Rotor in The Oil
Repeat part A for each oil level as defined by the seven graduation on the conical
portion of the rotor.The damping Coefficient depends on the area A of the curved
surface of the conical portion of the rotor exposed to viscous damping.
This area is equal to
, where ( ) is the radius of base of core and ( ) is the slant
height equal to
+
.
Plot a graph of damping coefficient to a base of A times mean radius .
Tabulate these as in Table (3.2).
Table (3.2)
Mean radius
(mm)
12.5
25.0
37.5
50.0
62.5
75.0
87.5
(
6.25
12.50
18.75
25.00
31.25
37.50
43.75
)
Area A
(
)
(
.
Period
)
3.7 Results
[20]
( )
Constant a
Damping
coefficient
September 14 2014
Plot a graph of log
Lab. of Theory and Vibrations Electromechanical Eng. Dept
to a base of n. Confirm that the damping is viscous, and
that the slope of the line is equal to (
) (the logarithmic decrement).
The period can be found by timing a convenient number of oscillations using a
stopwatch, whereupon the constant, , is determined and hence the value of the
damping coefficient (the torque per unit angular velocity) in ( N.m / rad / )
Damping torque
per unit angular
velocity
0
100
200
300
400
500
Damping area x effective(mean) radius mm x 10
[21]
September 14 2014
Lab. of Theory and Vibrations Electromechanical Eng. Dept
Experiment No. (4)
FORCED VIBRATION OF A RIGID BODY – SPRING SYSTEM
WITH NEGLIGIBLE DAMPING
4.1 Object of Experiment
1. Determine the natural frequency.
2. Determining the resonance condition.
3. Determining the angular displacement.
4.2Introduction
When external forces act on a system during it’s vibratory motion, it is termed
forced vibration. Under condition of forced vibration, the system will tend to
vibrate at it’s own natural frequency superimposed upon the frequency of the
excitation force.
Friction and damping effects, though only slight are present in all vibrating system;
that portion of the total amplitude not sustained by the external force will gradually
decay. After a short time, the system will vibrate at the frequency of the excitation
force, regardless of the initial conditions or natural frequency of the system.
[22]
September 14 2014
Lab. of Theory and Vibrations Electromechanical Eng. Dept
4.3Theory
FO sin t
S
D
A
CB
L1mg
Mg
L
Figure (4.1)
The system is shown in figure(4.1) and comprises of:
1. A beam AB, of length b, sensibly rigid, of mass m, freely pivoted at the lefthand end.
2. A spring of known stiffness S attached to the beam at the point C, at L2
from pivot.
3. A motor with out-of-balance discs attached to the beam at D, at L1 from
pivot.
M=mass of the motor including the two discs.
m=mass of the beam.
is the moment of inertia of the system (beam mass+motor and disc) about
the pivot Axis, where:
[23]
September 14 2014
Lab. of Theory and Vibrations Electromechanical Eng. Dept
= Angular displacement of the beam;
FO= Maximum value of the disturbing force;
= Angular velocity of rotation to the discs.
L = Total length of beam.
=unbalance mass removed from disc.
The equation of the angular motion can be obtain
By taking moment about pivot (A)
=M
=F0
+
The above equation reduces to take the form:
=
=
+
e
sin t
+ b0 = A
natural frequency = b0 =
=
A=
(
)
=
+
3
Equation solution of motion to give the steady state angular amplitude
.
=
=
[24]
September 14 2014
Lab. of Theory and Vibrations Electromechanical Eng. Dept
Resonance condition
=0
Note that in practical circumstances the amplitude, although it may be very large,
does not become infinite because of the small amount if damping that it always
present.
4.4 Apparatus
Figure (4.2)
The apparatus shown in figure 2 consists of a rectangular beam (D6), supported at
one end by a trunnion pivoted in ball bearings located in a fixed housing. The outer
end of the beam is supported by a helical spring of known stiffness bolted to the
[25]
September 14 2014
Lab. of Theory and Vibrations Electromechanical Eng. Dept
bracket C1 fixed to the top member of the frame. This bracket enables fine
adjustments of the spring, thus raising and lowering the end of the beam.
The DC motor rigidly bolts to the beam with additional masses placed on the
platform attached. Two out-of-balance discs on the output shaft of the belt driven
unit (D4) provide the forcing motion. The forcing frequency adjusts by means of
the speed control unit. The safety stop assembly (D5) limits the beam movement
for safety reasons. It is not a rest for the beam and should not be touching it during
the experiment or the reading will be false.
The chart recorder (D7) fits to the right-hand vertical member of the frame and
provides the means of obtaining a trace of the vibration. The recorder unit consists
of a slowly rotating drum driven by a synchronous motor, operated from auxiliary
supply on the Speed Control unit. A roll of recording paper is adjacent to the drum
and is wound round the drum so that the paper is driven at a constant speed. A felttipped per, fits to the free end of the beam; means are provided for drum adjustment
so that the pen just touches the paper. A small attachable weight guides the paper
vertically downwards. By switching on the motor, we can obtain a trace showing
the oscillations of the end of the beam.
If the amplitude of vibration near to the resonance condition is too large we can
introduce extra damping into the system by fitting the dashpot assembly (pan
numbers D2, D3 and D9) near to the pivoted end of the beam.
4.5 Experimental Procedure
First plug the electrical lead from the synchronous motor into the auxiliary socket
on the Exciter Motor and Speed Control. Adjust the hand wheel of bracket C1 until
the beam is horizontal and bring the chart recorder into a position where the pen
just touches the recording paper. Switch on the speed control unit so the resulting
forced vibration causes the beam to oscillate. lt has been found that a frequency of
[26]
September 14 2014
Lab. of Theory and Vibrations Electromechanical Eng. Dept
about 2Hz is suitable; the position of the motor can be adjusted accordingly. The
time for 20 oscillations will then be approximately 10 seconds. The chart recorder
can record the number of cycles performed by the beam in a given time (calculated,
knowing the speed of the paper or, better still, by visual counting).
Bring the pen into contact with the paper, then record the number of cycles and
calculate the cycles per unit time {i.e. the frequency) of the forced vibration beam.
You need to known the speed of the paper on the chart recorder. To obtain this,
record a trace for 20 seconds, for example, measure the length of the trace, thus
calculating the speed in mm/s. Determine the values of the relevant parameters as
described in the theory: lengths
,
magnitude of the masses m and M, also the
stiffness of the spring.
4.6 Results and Calculations
Using a stopwatch, time the linear speed of the drum for 20 vibrations and
determine the time for one cycle (period of vibration). Using the two different
methods determine the corresponding frequency. Calculate the relevant moment of
inertia.
Table (4.1)
Mass of motor with discs, M
Mass of beam m
Lengths, L1
Lengths, L2
Lengths. L
kg
kg
m
m
m
Calculate stiffness of the spring as calculated from Experiment No. 1
i.eS =
=
Calculate frequency of the forced vibration. The constant:
[27]
September 14 2014
Lab. of Theory and Vibrations Electromechanical Eng. Dept
b0 =
ƒ=
i.e
=(
) cycles
Compare with the values of ƒ found above.
Measure the amplitude of forced vibration (A) from the plot for different exciting
(forced) frequency, and compare with theoretical values using derived formula,
also
at resonance condition (
= ).
4.7 Conclusions
1. Make comparison between measured frequencies
experimental) for forced vibration.
2. Make comparison between angular amplitudes. .
3. Measured resonance amplitude with calculated.
(theoretical
and
Experiment No. (5 )
FORCED DAMPING (UNDAMPED) VIBRATION
5.1 Object
To study the amplitude and phase characteristics of single mass damped system
excited by rotating unbalance.
5.2 Theory
m
=
h
b
beam
Beam cross section
m
0
2
[28]
2
September 14 2014
Lab. of Theory and Vibrations Electromechanical Eng. Dept
Figure (5.1) system representation
I = moment of area of beam.
= equivalent mass.
M = removed unbalance mass.
= centrifugal force.
k = beam stiffness.
c=damping coefficient of fluid.
= rotational speed(exciting frequency).
e = eccentricity(distance from center of removed mass to center of
rotation).
X = steady state amplitude.
= phase angle.
= damping factor.
= natural frequency.
= critical damping coefficient.
= resonance amplitude.
E = young's modulus of beam material.
b = width of beam.
h = depth of beam.
=
12
=
+
[29]
+
1
2
September 14 2014
Lab. of Theory and Vibrations Electromechanical Eng. Dept
Equation of motion of the system
(
– m) +
Or;
m(x+c
) = -kx - c
+c +kx=m
sin(
Solution supposed
= X sin(
) ………….(5.1)
)
…………..(5.2)
Where ; unknown amplitude , ; unknown angle of phase lag .
5.3 Analytical Representation
After substituting (5.2) into (5.1) we get ;
=m
X
=
m
X
sin(
sin(
(
(
(
)
)
)
)+cX
cos (
)+ c X
(
)+kX
(
+ )+kX
……….....(5.3)
5.4 Vector (Graphical) Representation
Y
X
m
kX
[30]
C
)
(
)=
September 14 2014
Lab. of Theory and Vibrations Electromechanical Eng. Dept
X
Figure (5.2 )Vector Representation
From the figure (5.2) can obtain
X=
(
)
=
knowing that ;
=
(
and; tan
(
=
in resonance
=
(
) )
=
,
(
; tan
=
=
;
;
)
(
)
)
=2
and
…………(5.4)
.…………(5.5)
=
.
….………..(5.6)
5.5 Equipment used
1.
2.
3.
4.
5.
6.
7.
Rectangular beam simply supported.
Small motor with two graduated unbalance discs.
Stroboscope.
Micrometer.
Motor speed control unit.
Dashpot.
Contractor.
5.6 Procedure
[31]
=2
September 14 2014
Lab. of Theory and Vibrations Electromechanical Eng. Dept
1. For forced undamped vibration, remove dashpot.
2. Run the motor to a certain speed by the speed control unit.
3. At each speed measure the amplitude of vibration and the phase lag at the
instant when the earthed micrometer and the contactor are in contact (the
first stroboscope flash).
4. Repeat (3) at various speeds.
5. Repeat 2, 3, 4 with dashpot.
5.7 Requirements
1. Determine the equivalent mass;
=
2. Determine the stiffness at
=
+
2 ,k=
3. Determine theoretical natural frequency ;
+
1
2
=
=
4. Measure and plot amplitude phase characteristics of investigated system.
5. Knowing
, determine according to equation (6)
6. Knowing and corresponding
verify
E=2.1*10
, L=80 cm , M=8 Kg , b=2.54 cm , D=1.5 cm
(dia.of beam cross section )
3
=2.8*10
, t= 7 mm , e=4 cm , d=2 cm , h=1.27 cm
2
5.8 Discussion
1.
2.
3.
4.
5.
Discuss the effect of ( ) on the amplitude and phase angle .
Discuss your results.
Discuss the effect of unbalance of the vibration.
State the advantages of oil on damping vibration.
State the application of vibration absorber.
[32]
September 14 2014
Lab. of Theory and Vibrations Electromechanical Eng. Dept
Experiment No.(6)
Torsional Oscillations of Two Rotor System
6.1 Object of Experiment
Determination of following:
[33]
September 14 2014
Lab. of Theory and Vibrations Electromechanical Eng. Dept
1. moment of Inertia of rotors disc.
2. torsional stiffness of shaft.
3. natural period of oscillation of the two degree of freedom system.
6.2 Introduction
Figure (6.1)
Systems that require two independent coordinates to describe their motion are called two
degree of freedom system. The general rule for the computation of the number of
degree of freedom can be stated as follows
Number of degree of
freedom of the system
=
Number of masses in the system ×number of
possible types of motion of each mass
So there are two equations of motion for a two degree system ,one for each degree they
are generally in the form of coupled differential equations in values all the coordinate
,the equations of motion lead to a frequency equation that give two natural frequencies
for the system.
Thus a two degree system has two normal modes of vibration corresponding to the two
natural frequencies .In multi degree of corresponding to the two natural frequencies .In
[34]
September 14 2014
Lab. of Theory and Vibrations Electromechanical Eng. Dept
multi degree of freedom systems there is semi definite systems which known
unstrained or degenerate systems in this case we have two degree
System an two masses connected by spring { e.g (1) two railway cars, (2)turbine and
air blower connected by shaft ,( 3) gear train}
k
in
out
gear
gear in mesh.
It can be seen from solution of frequency equation that one of natural frequencies of
the system is zero ,which means that the system is not oscillating .In other word the
system as a whole without any relative motion between the two masses (rigid body
translation).
6.3 Theory
= Moment of inertia of rotor 1
=
L=Length of the shaft between the rotors
G= Modulus of rigidity of the material of the shaft
J=Polar second moment of area of the shaft section
=torsional stiffness of shaft.
1, 2) = angular displacement of rotors. = ( i=
Using summation of moment method… (Newton2nd law)
External moment =
=
(
)
.………..(6.1)
[35]
Lab. of Theory and Vibrations Electromechanical Eng. Dept
September 14 2014
+
(
).………. (6.2)
=0……….….(6.3)
+
=0……….….(6.4)
L
Figure (6.2) Two degree of freedom torsional system
Assumed solution
[(
( )
]=0
)
…….… (6.5)
(
To find natural frequencies to determinate of matrix.
(
[
)
)
(
( +
)]
=0
…….….(6.6)
=0
…….….(6.7)
[36]
( )
=
[(
)
Lab. of Theory and Vibrations Electromechanical Eng. Dept
September 14 2014
either
=0
=
or
(
)
=
……..…(6.8)
(
)
rad/sec
Even it is two degree of freedom system but one can notice only one frequency
because the system is degenerated.
The period of oscillation
(
= And using
Then:
= 2
1
2
( 1+
)=
2
This period can be calculate and compared with that obtained from the
experimental values, also the value of obtained theoretically be compared with the
experimental from previous experiments, and the mass moment of inertia of each
disc can be compared from results.
6.4 Experimental procedure
One of the shafts clamps between the two rotors
of predetermined
inertia. Record the effective length of the shaft measured between the jaws of the
chucks to insure that neither rotor can slip relative to the shaft. Rotate each rotor
through a small angle in opposite directions and then release torsional oscillations
of the system are thereby set up and the time for 20 oscillation recorded.
The periodic time of the system may be determined and compared with the
theoretical value given by the formula quoted in the theory section determine the
moment of inertia of each by measuring the time for 20 oscillation ,This system is a
single degree of freedom.
[37]
September 14 2014
Lab. of Theory and Vibrations Electromechanical Eng. Dept
When the frequency of oscillate can be obtain from
=
(
)
,then to obtain the moment of inertia from
=2
=
2
=
So
=
4
6.5 Results and discussion
Obtain the period of oscillation for the system for certain number of Oscillation for
different diameters and length of shafts and arrange in table and obtain the
theoretical values using the equation for period and make comparison and discuss
the effect of varying the length and diameter.
Also material (G) and state why there are differences and give reasons.
Shaft
diameter
mm
Time for 20
oscillation
3.17
4.76
6.35
[38]
Period
Sec
Theoretical value of
period
September 14 2014
Lab. of Theory and Vibrations Electromechanical Eng. Dept
ExperimentNo.(7)
CRITICAL WHIRLING SPEED OF SHAFT
7.1 Introduction
For any rotating shaft, a certain speed exists at which violent instability occurs. The
shaft suffers excessive deflection and bows – a phenomenon known as “whirling” .
If this “critical speed of whirling” is maintained, then the resulting amplitude
becomes sufficient to cause buckling and failure. However, if the speed is rapidly
increased before such deleterious effects occur, then the shafts is seen to restabilize and run true again until, at another specific speed, a double bow is
produced and so on for other speeds
Dunkerley first investigated the centrifugal forces involved and determined that the
only stabilizing force was that due to the elastic properties (“stiffness”) of the shaft.
Hence, he was able to deduce the speed at which the shaft would suffer an infinite
deflection due to whirling
7.2 Object of Experiment
An accurate analysis of the critical whirling speed for the range of shaft
geometry’s, both loaded and unloaded and with different combinations of end
conditions.
7.3 Description of apparatus
The whirling of shaft apparatus is shown in Figure (7.1)two unique features are
incorporated, which allow the shaft to adopt its actual whirling configuration
predicted by elastic theory. The first is a kinematic coupling located at the driven
[39]
September 14 2014
Lab. of Theory and Vibrations Electromechanical Eng. Dept
end of the shaft, which is designed to prevent the transmission of any restraining
forces by the motor of the shaft. The second features is a sliding bushed end which
affords sliding motion of the shaft on a longitudinal phosphor bronze bearing ,
whilst revolving in a radial ball bearing.
A diagrammatic representation of the whirling of shafts apparatus is shown in
figure (7.1.a). The specimen shaft is of the form shown infigure (7.1.b) and is
located in the kinematic coupling and either the fixed or free type sliding end
bearing. Several shafts of various diameters and lengths are available and these
appear tabulated in the table (7.1).
(a)
(b)
Figure (7.1) whirling of shaft apparatus (a) and shaft (b)
Table (7.1) Shaft Diameters and Lengths Available
Shaft No.
d
mm
[40]
m
September 14 2014
Lab. of Theory and Vibrations Electromechanical Eng. Dept
1.
2.
3.
4.
3
3
6
7
0.750
0.900
0.900
0.900
The Kinematic coupling and sliding end bearings have been so designed as to allow
the shaft movement in a longitudinal direction, for the purpose of location before
tightening, and so provide directional clamping of the shaft end.With the standard
apparatus, the sliding end bearing provides directional fixing to the end of the shaft,
although an interchangeable sliding end bearing is available which provides a
directionally free support. These bearings are showninfigures (7.2) and (7.3).
[41]
September 14 2014
Lab. of Theory and Vibrations Electromechanical Eng. Dept
Figure2(7.2) sliding bearing (fixed)
Figure (7.3) sliding bearing (directionally free)
7.4 Theory
= Natural frequency of transverse vibration mode
E= Young's modulus
= Second moment of area of shaft
= Weight per unit length of shaft
[42]
Lab. of Theory and Vibrations Electromechanical Eng. Dept
September 14 2014
= Acceleration due to the gravity
= Constant dependent upon the end conditions and mode number
d = shaft diameter
=shaft length
A = amplitude
M = disc mass
= eccentricity
K = shaft stiffness
= exciting speed
= critical speed
= weights
= constants
If we examine the simplest case of a single, heavy rotor rigidly attached to a light
(inertia-less) spindle, then the physical situation can be expressed in Figure (7.4)
G
C
A
O
D
Figure (7.4) whirling of shaft due to unbalance
[43]
O
Lab. of Theory and Vibrations Electromechanical Eng. Dept
September 14 2014
The system consists of a disc of mass (M) located on a shaft simply supported by
two bearings. The center of gravity (G) of the disc is at a radial distance
from
the geometric centre C. The centre line of the bearings OO intersects the plane of
the disc at D, at which point the disc center C is deflected a distance A
The centre of gravity G thus around point D, describing a circle radius ( + )
and the centrifugal reaction thus produced is:
(A+ ) ………….(7.1)
For any given speed
This force, according to Dunkerley, is balanced by elastic righting forced of the
shaft at point D equal to KA where K is stiffness of supported shaft.
Therefore
( + )=
…………… (7.2)
From which, the amplitude of vibration obtained
=
…………… (7.3)
=0
This equation will become infinite when
(i.e resonance condition)
= …………. (7.4)
Therefore, if
the value of
=
denotes the critical whirling speed, substituting in equation (7.3)
=
, we obtain
………….. (7.5)
Therefore, at < then A and have the same sign, i.e. the centre of gravity G is
situated as shown in Figure (7.4) .
[44]
September 14 2014
Lab. of Theory and Vibrations Electromechanical Eng. Dept
At
the deflection of A becomes infinite as described which
demonstrates that at the whirling speed, A, the radius of the shaft rotation about the
bearing centre line, and the radius of G from the geometric centre of the disc, are
perpendicular. This is analogous to the resonant conditions, which exist for a forced
vibration, where the disturbing force vector is 90 degrees in advance of the
displacement vector.
At > ,
A and
are of opposite sign and hence the centre of gravity now
lies between C and D, inferring that the disc has become rotated through 180 from
its rest position.
For very high speeds where
about G with perfect stability
,
the amplitudes A
, hence the disc rotates
Dunkerley deduced that the whirling speeds were equal to the natural frequencies
of transverse vibration, there being the same number of whirling speeds as natural
frequencies for a given system. Thus a theoretical value for the critical speed may
be obtained from the formula for the fundamental frequency of transverse
vibrations.
The value of
=
is that resultant from beam theory and for various end conditions,
the values are shown in Table (7.2).The value c is the constant for use in
calculating the first natural frequency and c is that necessary for the second mode.
From the Table (7.2)cases 3 is included for comparative purposes only, since it is
obviously unsuitable for experimentation.
Table(7.2)
Case
Ends
1
2
3
4
Free-Free
Fixed-Fixed
Cantilever
Fixed-Free
1.572
3.75
0.56
2.459
[45]
6.3
8.82
-7.96
September 14 2014
Lab. of Theory and Vibrations Electromechanical Eng. Dept
Table of constants to Calculate Frequency of Transverse Vibration for various End
Conditions.
7.5 Results and discussion
The experimental result of speeds for each of above cases are carried out and each
one been noted from the digital recorder, and verified by the stroboscope image of
the specific mode as shown in Figure (7.5),(7.6).
Figure (7.5)
[46]
September 14 2014
Lab. of Theory and Vibrations Electromechanical Eng. Dept
Figure (7.6)
Which shows the first and second whirl mode .these values can be compared with
the theoretical ones for each boundary conditions ,the difference between them is
due two experiment environment.. etc
7.6 Conclusions:1. What can you deduce from the increase in speed on, shape…
2. Effect of boundary conditions on shapes and critical speed values.
[47]
September 14 2014
Lab. of Theory and Vibrations Electromechanical Eng. Dept
[48]