INTERNATIONAL JOURNAL OF ENGINEERING TECHNOLOGY AND COMPUTER APPLICATIONS.
Automatic Change Detection System for Paediatric
Acute Intracranial Hemorrhage Using Regression
Kernels
E. Ben George1, R. P. Anto Kumar2, R. Gandhiraja3 , M. Karnan4
Dept of CSE, Periyar Maniammai University and Part-time Research Scholar, Bharathiar University
Dept of IT, St.Xaviers Catholic College of Engg and Part-time Research Scholar, Bharathiar University
Research Scholar, JJT University, Rajasthan
Dept of CSE, Tamilnadu College of Engg, Coimbatore
1
e_bengeorge@yahoo.com
anto_friends@yahoo.com
3 rgandhiraja@yahoo.co.in
4 karnanme@yahoo.com
2
diagnostics, screening and detection tools. It provide
clinicians with computerized analysis of medical images as
a “second opinion“ in detecting lesions, assessing extent
and progression of disease, as well as supporting diagnostic
decisions.
The automatic detection of subtle change between
images of the same scene taken at different times is a very
important method in large number of applications in diverse
fields. Some of the important applications include video
surveillance [12] – [14], remote sensing [15]-[19], medical
diagnosis [2] - [6].
Once a set of input images is given the change
detection process is performed to automatically detect the
changes (both spatial and spectral changes). The detailed
review on change detection algorithms [1] is the basis for
this literature.
Our proposed method is based on the calculation and
use of what we call local regression kernels [8-10] which
are local features computed directly from the given pixels in
both the reference image and the target images, as
elaborated below. The key idea behind local regression
kernels is to robustly obtain local geometric structures of
images by analyzing the radiometric (pixel value)
differences based on estimated gradients, and use this
structure information to determine the shape and size of a
canonical kernel.
To summarize the operation of the overall algorithm,
given the reference image and the target image, we first
calculate the LSK from both the reference image and the
registered target image at all pixel locations. Comparison
between LSKs computed from two images is carried out
using the cosine similarity measure [9, 10]. The overall
algorithm yields a scalar dissimilarity map (DM) ,indicating
the local statistical likelihood of dissimilarity between the
reference and target images. DM values exceeding a
threshold then identify meaningful and relevant changes.
The proposed method is robust to various challenging
conditions including unequal signal strength.
Abstract -In this paper, we put forward a methodology for a
computer-aided change detection system, to assist clinicians
diagnose bleeding in children’s brains—i.e., in medical terms,
Paediatric Acute Intracranial Hemorrhage (PAIH). The
proposed system provides clinicians with computerized
analysis of medical images in the form of computed
tomography (CT) scans or MRI scan of the heads of child
patients. This, in turn, leads to more efficient detection,
diagnosis, and progress evaluation of paediatric AIH. The
proposed method uses a single modality to find slight changes;
and does not require prior knowledge (learning) of the type of
changes to be sought. The method is based on the computation
of a local kernel from the reference image, which measures the
likeness of a pixel to its surroundings. This kernel is then used
as a feature and compared against analogous features from the
target image.
Keywords -- Change Detection, Paediatric Acute
Intracranial Hemorrhage (PAIH), Computed Tomography
(CT), Magnetic Resonance imaging (MRI), local regression
kernel
I.
INTRODUCTION:
A survey in USA states that Traumatic Brain Injuries
(TBI) for children (0 to 14years) results in an estimated
2,685 deaths, 37,000 hospitalizations [5]. On an average
1,301 children suffer due to TBI each day. This data might
be huge in case of the developing countries. As major
continuation to TBI, Acute Intracranial Haemorrhage (AIH)
in general and paediatric AIH in particular has become a
public health problem. In simple terms, AIH refers to recent
bleeding inside the confines of the skull. It occurs when a
blood vessel either an artery or a vein in the head ruptures
or leaks. It can result from physical trauma or non-traumatic
causes such as ruptured aneurysum. One way to help
clinicians reduce the damage caused by AIH is to improve
the accuracy and efficiency of medical condition or diseases
by its signs, symptoms and results of various diagnostics
procedures (e.g., radiological images, laboratory results).it
can be enhanced by the use of a screening and detection
tools. The earlier the diagnosis of a medical condition or a
disease, the better is the chance for a complete health
recovery.
The diagnostics, screening and detection tools can
help clinicians decide which medical tests and/or alternative
procedures to be used for identifying diseases at an early
stage. A computer-aided system is an example of such
The main application is that we can compare the two
images and find the difference between them. This process
is done to find if any blood clot is present in the brain In
this introductory part it is mandatory to mention few of the
existing algorithms for change detection.
9
INTERNATIONAL JOURNAL OF ENGINEERING TECHNOLOGY AND COMPUTER APPLICATIONS.
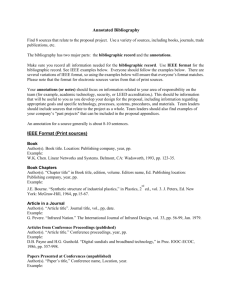
Input
Preprocessing
Reference
Brain Image
R
Target Brain
Image
T
Processing
R
T
Geometric
Adjustments
or
Image
Registration
R1
Radiometric
or
Intensity
Adjustment
Compute
Local
Steering
Kernels
(CSK)
T1
K Rj
Construct
dissimilarity
Map by Cosine
Similarity
KTj
Perform
Significant Test
Output
Detected
Changes
Fig 2. System Overview
The first approach uses simple differencing for change
detection. Consider T and R be the Target and the
Reference images respectively, for which we apply change
detection algorithm.
use this structure information to determine the shape and
size of a canonical kernel.
To be more specific, the local steering kernel
function K (xi − xj ) is calculated and normalized as
follows
Calculate the difference image
D(x)=T(x)-R(x)
Generate change mask B(x)
B(x)= 1 if D(x) > T and is 0 otherwise
where T is a threshold value.
If B(x) has more number of 1’s then there is a significant
change in other image and the corresponding pixels in the
target image can be displayed.
The second method calculates the EALD (Expected
Absolute Luminance Difference) between two images. The
two images are partitioned into equally sized non
overlapping blocks. For each block calculate the normalized
EALD and then compute the difference image. The dark
areas in the difference image represent the blocks with large
difference.
II.
K ( xi x j )
det(C i )
h2
( xi x j ) T C i ( xi x j )
exp
2
2
h
i=1,2,…..P2 (no of pixels in local window)
j=1,2,…..N2(no of pixels in the image)
C i is the covariance matrix which can be computed using
the given formula
Ci i
TECHNICAL DETAILS
Consider that we have two MR images R and T. First
perform preprocessing on the two images. Preprocessing
involves two steps; the first step is to perform a geometric
adjustment that is image registration on both the images.
Second step is to perform radiometric/ intensity adjustment
which helps both the images to match with respect to the
intensity.
The next step in the proposed algorithm is to
calculate the Local Steering Kernel (LSK) measuring the
relationship between a center pixel and its neighboring
pixels, at each pixel from both R and T . The key idea
behind local regression kernels is to robustly obtain local
geometric structures of images by analyzing the radiometric
(pixel value) differences based on estimated gradients, and
i
UT
i i i
Cosi Sini
Sini Cosi
=
0
i = i
1
0 i
where
i Scaling parameter
Rotation Parameter
i
i Elongation Parameter
To calculate i , & i
i
In order to calculate
10
i
first calculate
INTERNATIONAL JOURNAL OF ENGINEERING TECHNOLOGY AND COMPUTER APPLICATIONS.
I R,T
The gradient vector Gi
Gi =
.
.
.
Zx1( x j )
.
.
Where
.
.
Z x 2 ( x j )
.
.
.
Z x1 (.) & Z x 2 (.) are first derivatives along x1 & x2
directions
x j Local Window
In the above equation Gi is the gradient matrix and which
can be decomposed by applying the singular value
decomposition method.
SVD(Gi)= i S iVi
Where
T
Vi is the orthogonal matrix
V1
where V1 & V2 are the II column
V
2
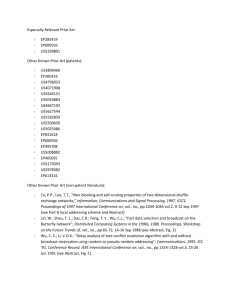
Fig. 2. Examples of Local Steering Kernels
i arctan
To calculate
i =
Fig. 2 shows some examples of LSK in various regions
of both the reference and the target. Note that LSKs
computed from various regions in both reference and target
look essentially identical except for regions 7 and 8 where
small lesions exist.
Vi
elements of 2x2
i
S 1 1
,
S 2 1
1 0
1
1 1.0
take
At each pixel xj, with a preselected window size of P x P
, we get P 2 numbers by column-stacking (rasterizing)
vector KI (xi-xj) as kjI (I€ {R, T }).
regularization parameter
Shape of the kernel is circular in flat areas
and elongated near edge areas
(S1 S2 )
(S1 S2 0)
The next step in the algorithm is the measurement of a
“distance” between the computed features, kjR and kjT
Instead of using common distance measures like Euclidean
distance, Manhattan distance etc. , the correlation-based
similarity measures can be used, we propose to use cosine
similarity for change detection. Cosine similarity is defined
as the inner product between two normalized vectors as
follows:
1/ 2
S S "
To calculate i 1 2
m
"
- regularization parameter
M – Number of samples in the window
( K Rj )T K Tj
Cosj
|| K Rj || || K Tj ||
Cos j [1,1]
( K Rj , K Tj )
The global smoothing parameter can be calculated using the
formula
1/ 4
h
pf ( xi )
The cosine similarity measure therefore focuses only on the
angle (phase) information while discarding the scale
information.
p - Number of pixels in local window
f(xi) - density of samples
- regularization parameter
When it comes to interpreting the value of “correlation”,
Using the above formulae we can calculate K xi x j
that
K I ( xi x j )
P2
K
i 1
where
I
j
€ [ 0, 1] describes the proportion of variance in
common between the two LSKs as opposed to j which
indicates a linear relationship between two LSKs kjR; kjT .
As for the final test statistic comprising the values in the
dissimilarity map, we use the proportion of “residual”
which is the local steering kernel for each block. The
calculated LSK should be normalized using the formula
K I ( xi x j )
2
( xi x j )
variance (1 -
j=1…….M
i=……...P2
2 j)
j
to the shared variance
2 .
j
More
specifically, the test statistic at each point in the image is
computed and dissimilarity map (DM) is generated at each
11
INTERNATIONAL JOURNAL OF ENGINEERING TECHNOLOGY AND COMPUTER APPLICATIONS.
point as follows:
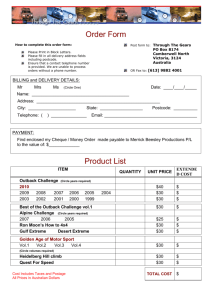
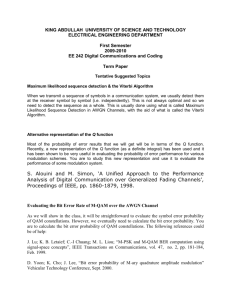
pixel in R and T yields a 25-dimensional local descriptor
respectively. By performing significance test on the
resulting dissimilarity map, we have detected regions with
significant changes. Fig. 3 illustrates about the two input
images R and T and the resulting change detected output..
1 2
j
f ( j )
j 2
In order to detect significant changes using the DM, we
need a threshold t. If we have a basic knowledge of the
underlying distribution of f ( j ) , then we can make predictions about how this particular statistic will behave, and
thus it is relatively easy to choose a threshold which will
indicate whether the pair of features from the two images
are sufficiently dissimilar. But, in practice, we do not have a
very good way to model the distribution of f ( j ) .
Therefore, instead of assuming a type of underlying
distribution, we employ the idea of nonparametric testing.
We compute an empirical PDF from the values of f ( j )
across the image and we set t so as to achieve, for instance,
a 99 % confidence level in deciding whether a given value
is in the extreme (right) tail of the distribution. This
approach is based on the assumption that in the target
image, most of pixels are not involved with significant
change, and therefore, the few outliers will result in values
which are in the tail of the distributions of f ( j ) .
(a)
In this paper, we have proposed a novel and relatively
simple, but effective statistical change detection framework
to detect meaningful changes between two CT images. Our
main contribution consists of a general nonparametric
statistical framework based on local steering kernels, and
calculation of test statistics derived from cosine similarity.
The proposed framework is good enough as to be
extendable to 3-D in serial MRI scans.
REFERENCES
[1] R.J.Radke, S. Andra, O. Al-Lofahi, and B. Roysam, “Image change
detection algorithms: A systematic survey,” IEEE Transactions on
Image Processing, vol. 14, pp. 294–307, March 2005.
[2] Hae Jong Seo and Peyman Milanfar, “A Non-Parametric approach to
automatic change detection in MRI images of the brain”, IEEE
International Symposium on Biomedical Imaging: From Nano to
Macro, Boston, June, 2009
[3] Boyu Hao, Carson Kai-Sang Leung, Sergio Camorlinga, Martin H.
Reed, Martin K. Bunge, Jens Wrogemann, Rick J. Higgins, “A
computer-aided change detection system for paediatric acute
intracranial haemorrhage”, Proceedings of the2008 CSE conference
,Montreal, Quebec, Canada
[4] M. Bosc, F. Heitz, J. Armspach, I. Namer, D. Gounot, and L.
Pumbach, “Automatic change detection in multimodal serial MRI:
applicaton to Multiple Sclerosis lesion evolution,” NeuroImage, vol.
20, pp. 643–656, July 2003
[5] M. J. Dumskyj, S. J. Aldington, C. J. Dore, and E. M. Kohner, “The
accurate assessment of changes in retinal vessel diameter using
multiple
frame
electrocardiograph
synchronised
fundus
photography,” Current Eye Research, vol. 15, no. 6, pp. 652–632,
June 1996.
[6] L. Lemieux, U. Wieshmann, N. Moran, D. Fish, , and S. Shorvon,
“The detection and significance of subtle changes in mixed-signal
brain lesions by serial MRI scan matching and spatial
normalization,” Medical Image Analysis, vol. 2, no. 3, pp. 227–242,
1998
[7] J.A. Langlois, W. Rutland-Brown, and K.E. Thomas, “Traumatic
brain injury in the United States: emergency department visits,
hospitalizations, and deaths. Centers for Disease Control and
Prevention” ,US Department of Health & Human Services, 2004.
[8] K. Mikolajczyk and C. Schmid, “A performance evaluation of local
descriptors,” IEEE Transactions on Pattern Analysis andMachine
Intelligence, vol. 27, no. 10, pp. 1615–1630, October 2005.
[9] H. Takeda, S. Farsiu, and P. Milanfar, “Kernel regression for image
processing and reconstruction,” IEEE Transactions on Image
Processing, vol. 16, no. 2, pp. 349–366, February 2007.
[10] ——, “Deblurring using regularized locally-adaptive kernel
regression,”IEEE Transactions on Image Processing, vol. 17,
pp.550–563, April 2008.
[11] C. Kervrann and J. Bourlanger, “Optimal spatial adapation forpatchbased image denoising,” IEEE Transactions on Image Processing,
vol. 15, no. 10, pp. 2866–2878, October 2006.
[12] J. J. Bartko. Measurement and reliability: statistical thinking
considerations. Schizophr Bull, 17(3):483–489, 1991.
[13] Y. Benjamini and Y. Hochberg. Controlling the false discovery
rate: A practical and powerful approach to multiple testing. Journal
of the Royal Statistical Society, 57(1):289– 300, 1995.
[14] R. Collins, A. Lipton, and T. Kanade, “Introduction to the special
section on video surveillance,” IEEE Trans. Pattern Anal. Machine
Intell., vol. 22, no. 8, pp. 745–746, August 2000.
[15] C. Stauffer and W. E. L. Grimson, “Learning patterns of activity
(b)
(c)
Fig 3. Input and output images
(a) Target Image T (b) Reference Image (c) Change
detected image
III.
RESULT AND CONCLUSION:
The described algorithmic concepts were implemented
and tested properly. We have computed LSK of size 5 x 5
as descriptors from both R and T . As a consequence, each
12
INTERNATIONAL JOURNAL OF ENGINEERING TECHNOLOGY AND COMPUTER APPLICATIONS.
using real-time tracking,” IEEE Trans. Pattern Anal.Machine Intell.,
vol. 22, no. 8, pp. 747–757, August 2000.
[16] C. R. Wren, A. Azarbayejani, T. Darrell, and A. Pentland, “Pfinder:
Real-time tracking of the human body,” IEEE Trans. Pattern Anal.
Machine Intell., vol. 19, no. 7, pp. 780–785, 1997.
[17] L. Bruzzone and D. F. Prieto, “An adaptive semiparametric and
context-based approach to unsupervised change detection in
multitemporal remote-sensing images,” IEEE Trans. Image
Processing, vol. 11, no. 4, pp. 452–466, April 2002.
[18] J. B. Collins and C. E. Woodcock, “An assessment of several linear
change detection techniques for mapping forest mortality using
multitemporal Landsat TM data,” Remote Sensing Environment, vol.
56, pp. 66–77, 1996.
[19] A. Huertas and R. Nevatia, “Detecting changes in aerial views of
man-made structures,” Image and Vision Computing, vol. 18, no. 8,
pp. 583–596, May 2000.
13
 0
0
advertisement
Related documents



Download
advertisement
Add this document to collection(s)
You can add this document to your study collection(s)
Sign in Available only to authorized usersAdd this document to saved
You can add this document to your saved list
Sign in Available only to authorized users