Detecting and Tracking of Mesoscale Oceanic Features in

Automated Oceanographic feature detection from high resolution satellite images
Ayan Chaudhuri, Avijit Gangopadhyay*, Ramprasad Balasubramanian and Sourish Ray
Department of Computer and Information Science/* Physics and School for Marine Science and Technology
University of Massachusetts Dartmouth, 285, Old Westport Road, North Dartmouth, MA 02747 g_achaudhuri@umassd.edu
, rbalasubrama@umassd.edu
, avijit@umassd.edu
, u_s1ray@umassd.edu
Abstract
This research focuses on analysis and processing of highresolution Sea Surface Temperature (SST) and
Chlorophyll_a (Ocean Color) observations from satellite data. Our objective is to detect and locate mesoscale oceanographic features, such as eddies, upwelling, jets, filaments and narrow frontal regions. Our approach is to identify these features by utilizing their dominant patterns and variability to characterize their spatial segmentation properties. Mesoscale phenomena, such as eddies, currents, fronts and upwelling regions in the Monterey
Bay and in the Gulf of Mexico are studied here. An automatic ocean feature identification procedure is presented. Schemas like eddy structuring element construction and banded thresholding methodology are discussed. This approach is demonstrated on satellite derived images of SST and Ocean Color.
Moreover, any particular oceanic region is unique in its dynamical behavior. The dynamical behavior is generally expressed in terms of the evolution and interaction of prevalent structures. These structures exist, evolve and interact over many scales, and a characterization of the circulation of the region would involve dynamical quantification of the various oceanographic properties as it relates to these specific structures. These features
(fronts, eddies, gyres) were modeled by three-dimensional empirical-analytical representation by [1, 2] for western north Atlantic and Gulf of Maine regions. This method was later generalized for any ocean by [3]. Detection of these features is a pre-requisite for initialization and updating (assimilation) of regional ocean models for synoptic ocean prediction [4, 5]. Algorithms for eddy detection and tracking in numeric ocean models have also been proposed by [6].
Key Words
Scientific Visualization, Remote Sensing, Eddy Detection,
Upwelling, Physical Oceanography.
1. Introduction
The horizontal to vertical aspect ratio in oceanography spans from 5000 km/5 km for large ocean basins to 10 km
/ 50 m for shallow coastal regions of embayments and estuaries. The spatial scale of oceanographic phenomenon spreads over a range from 1 meter to 1000 kms of planetary waves with periods ranging from seconds
(surface gravity waves) to those of equatorial Kelvin waves (months) and baroclinic Rossby waves (years).
NASA and NOAA have environmental satellites that view the entire Earth's surface everyday, acquiring data in various spectral bands. Key remote sensing instruments like Advanced Very High Resolution Radiometer
(AVHRR), Moderate Resolution Imaging
Spectroradiometer (MODIS) and Sea-viewing Wide
Field-of-view Sensor (SeaWiFS) aboard these satellites play a vital role in collecting observations that help in predicting global changes accurately and concisely.
Clearly, the sampling of SeaWifs (Color) and AVHRR
(Temperature) fall in a specific space-time window, which depends on the sensor design. Subsequently, the interpretation of their spatial and temporal coverage will be most effective to the oceanographic features that their sampling frequencies can resolve.
Thus, it is important to detect and track these features in almost real-time, which is being progressively recognized from the recently available high resolution satellite images obtained periodically from remote sensors like AVHRR
(1.1 km), SeaWIFS (1.8 km) and MODIS (250 m).
Increasing resolution allows the oceanographer to observe mesoscale, submesoscale and fine-scale features with unprecedented synopticity. Although there have been several numerical ocean circulation models that have been developed to quantitatively reproduce structures like eddies, fronts, filaments, meanders and upwelling regions, the lack of proper assimilation of real-time data may well create errors on spatial and temporal scales. This rationale has prompted our primary objective to develop methods to automatically detect, segment and track mesoscale structures from real-time satellite data. This paper discusses the design of one such recognition system. Our long-term goal is to intelligently detect any mesoscale oceanographic features. The present system will concentrate on identifying eddy, upwelling and frontal structures on SST and Ocean color data sets.
2. Previous work
Most of the previous work in learning about mesoscale and fine-scale ocean features have been done using computer based Ocean Modeling. However, the great energy of mesoscale features and their relatively small spatial scales, the high thermal and chemical capacity of
the oceans and the slowness of their circulation conspire to challenge computer models. Given that simulations describing ocean motions require processing of datasets in terabytes, supercomputer based parallel visualization systems such as Remote Interactive Visualization and
Analysis (RIVA) and PARallel VOXel renderer
(PARVOX) have been developed to analyze huge 2-D and
3-D datasets respectively [7]. The Naval Research
Laboratory (NRL) has developed the world’s first eddyresolving nowcast and forecast system using satellite observations and the NRL Layered Ocean Model
(NLOM). The system is being used to enhance real-time knowledge of the marine environment [8].
Remote sensing and visualization has contributed immensely in understanding ocean features on both spatial and temporal scales. Radiometers on satellites record images at various spectral bands. Synthetic Aperture
Radars (SAR) have also become a valuable measurement tool for marine parameters like wind speed, ocean wave spectra and sea ice parameters [9]. These measurements are subsequently analyzed using already established and currently evolving visualization schemas and algorithms.
Visualization techniques provide mechanisms to aid researchers to observe physical phenomena with respect to ocean sciences. However, effective schemas should be able to extract regions, accurately classify and visualize them, abstract the regions of interest for easier interpretation and track their evolution. Coherent features are easily recognized when datasets are visualized as they are spatially and temporally localized. The overwhelming size of time-variant datasets makes the task of visualization difficult [10]. Feature-based algorithms vastly simplify exploration of large datasets. Each domain has its own set of important features and analytical studies of their behavior become simpler.
3. Motivation
Prominent surface currents amongst all the oceans in the world are like huge rivers in the ocean that transport large amounts of heat to balance the global heat budget. These currents during their traversal develop flow instabilities, creating mesoscale turbulences that lead to the formation of structures like eddies, coastal upwelling regions and oceanic fronts.
Eddies are ocean vortices that are created when a large meander loops back on itself and detaches from the main current. These eddies consist of water that is of different temperature than the water that surrounds them. On the surface, open ocean eddies are usually about 100–300 km, and the coastal eddies are on the order of 50 km or less in diameter. However, they are not just surface features.
They can reach depths of almost 4000 m, and sometimes they are subsurface trapped [11]. Typically, there are two types of eddies, one being the cold core eddies in which the eddy center is cold and surrounding temperature is greater, and warm core eddies in which the eddy center is warm and surrounding temperature is lower. Cold core eddies bring about an increase in organisms that comprise the marine food web, attracting fish and fishermen. The swirling motion of eddies cause nutrients that are normally found in colder, deeper waters to come to the surface.
Eddies effect coldwater upwelling that subsequently increase chlorophyll and plankton production on nutrientlimited surface waters.
Coastal upwelling is a synoptic phenomenon that brings cold, nutrient rich water from the deep ocean to the surface. Strong seasonal winds along the coast of the western shores of the continents in the Northern
Hemisphere and the earth’s rotation drive the coastal waters off-shore (Ekman transport). This creates a void that is replenished by the deep water rising up to the western edges of the continents. The surface water driven off-shore is warmer and the deep heavier water that gets upwelled is colder, thus defining a sharp horizontal temperature gradient. The cold nutrient-rich deep water enhances biological productivity.
Oceanic fronts are created as an interface between water masses of varying physical characteristics. The interface is usually between colder fresh coastal water mixing with warm salty current water. Fronts are characteristics of strong thermal profiles with sharp transitions in temperature.
Observations of sea-surface temperature and ocean color satellite images have revealed many such strong features in the California Current System (CCS). This ocean current meanders southwards, offshore from Oregon to
Baja, California. The current system also comprises a poleward undercurrent and surface countercurrents that altogether exhibit elaborate eddy characteristics, diverse regional features, and immense biological activity that have puzzled oceanographers for decades.
Much attention has been paid in oceanography on the detection of “fronts”. Frontal detection algorithms have been developed [12] to identify and help analyze and understand frontal properties of major oceanographic regions. Frontal occurrence and frequency distribution maps are now available for almost all regions of the
World Oceans.
These frontal detection algorithms are fully automated and objective in their operations, which processes pixel-level information and stores frontal locations, which are defined
as primarily an “edge”, or a differential drop in temperature within a certain distance. However, it is difficult, if not inapplicable in certain cases, to apply this algorithm for interpreting features such as eddies, upwelling regions, jets and squirts, mushroom vortices etc. Even for the Gulf Stream front and its rings, manual/visual analysis schemes are favored over the automated algorithms because of the simplicity and applicability of the former to feature identification and scene description, which is valuable for numerical model initialization, assimilation and evaluation [5]. The manual/visual approach also has an important element of educational and research value for a particular oceanographic feature in a given region.
There are three distinct differences between our methodology and that of a “general” edge-detection algorithm. Our approach is to: (1) develop an automated procedure for detecting particular features such as eddies, coastal upwelling, coastal jets/filaments in a particular region; (2) use a priori information of the features of interest; and (3) use as much satellite information as available from many different sources for the same feature. Our long-term goal is to extend the present system to a general-purpose “knowledge-based” intelligent algorithm applicable to any region of the world ocean.
4. Methodology
4.1 Structuring Element for mesoscale features
One striking characteristic amongst mesoscale structures is that they have physical characteristics that are different from the water surrounding them. This forms the basis of quantification for the feature detection process. The formulation of the eddy tracer equation is given follows:
T ( ( r ) = T c
[ T c
T k
] { 1 e x p ( r / / R ) } ( 1 ) )
Where,
‘r’ is the radial distance from the center of the eddy.
‘Tk’ is the background temperature.
‘Tc’ is the core temperature.
R= 5*R0, where R0 is the Rossby radius.
Detailed oceanographic application of the above eddy parameterization is given by [3]. From equation (1) it can be ascertained that if we are given a reasonable estimate on the core temperature, the boundary temperature and the lateral distance of the eddy region, we can design an automatic eddy detection algorithm using some visualization techniques. A similar analogy will also hold true for detection of upwelling regions as they too project sharp temperature gradients along their boundaries.
Detection of eddies and upwelling regions begins by prompting the user to specify the core temperature, boundary temperature and a lateral distance estimate of these structures. These parameters form the basis for segmentation of the dataset into regions with potential eddy or upwelling structures. Performing a binary f threshold on the data based on the following equation (2) does region segmentation:
T
(x,y) =
1, if T
C
< f(x,y) < T
K
0, otherwise
(2) where,
‘Tk’ is the background (or boundary) temperature.
‘Tc’ is the core temperature.
A 2X2 pixel mask is applied to the thresholded data to eliminate thin edges and obtain well-defined regions.
Any small insignificant regions called holes are filled to obtain better definition. These candidate regions of interest are given as inputs to the mesoscale feature recognition system to locate eddy and upwelling regions.
The recognition system constructs a structuring element to perform feature detection. The implementation of the structuring element between the upwelling and the eddy structures differ due to their structural variability. These techniques are presented below.
4.2 Eddy detection algorithm
One dominant characteristic amongst eddies are their circular shape. This observation prompts us to create a disk-shaped structuring element. A structuring element is described as a set of co-ordinates with a discrete number of points relative to some origin that specify a definite pattern. It is widely used in image morphology to perform erosion and dilation.
Figure 1: A structuring element (Source: mathworks.com)
The disk shaped structuring element as depicted in Figure
1 is created keeping the radius length analogous to that of the specified lateral distance. However, as the stipulated distance is an estimate by the user, an error measure is set up to 75% of the estimated distance. This measure implies
that all regions with a distance greater than 75% of the estimate will be considered as potential eddy regions. The radius length is obtained by converting the stipulated distance specified by the user (in kilometers) to a pixel distance. Pixel distances are obtained by calculating the resolution (km/pixel) of the dataset based on its the size and spatial (latitudinal) distribution. The structuring element is traversed across the entire dataset to ascertain regions that match the shape of the disc. Candidate regions are kept for further analysis and others are discarded. Further elimination is done by comparing the major axis length for each obtained region to the pixel distance. All regions with major axis lengths below the pixel distance are eliminated. The center of mass for each remaining region is calculated to form the basis for a definite identification. The equation (3) for center of mass is as follows: i=k j=k
C
X
= 1/ k (
x i
); C y
= 1/ k (
i=1 j=1 y j
) (3) where, k = total number of points in the region; x, y = x, y co-ordinate for each pixel in the region.
For near-circular eddies, it is a reasonable assumption to consider the center of mass as the eddy center. For elliptical or irregular eddies, the computed center is the centroid of the region. After initial segmentation, positive identification of eddy and upwelling regions differ which is attributed to their individual characteristics.
The circular definition of eddies facilitates us to expect a sharp change in temperature gradient occurring at a uniform distance from eddy center as we approach its circular boundary. Thus each region is concentrically traversed outward in circular iterations starting from the center of mass. A normalized temperature value is calculated in each iteration as we move outward in a circle. Since it is expected that the temperature within the eddy will be comparable, we place the normalized values in the proximity of the center of mass into a curve-fitting algorithm. The proximity is deterministically set to half of the stipulated lateral distance. The curve-fitting algorithm is modeled using the following linear regression equation: y = a
0
+ a
1
t (4) where, a
0
= intercept; a
1
= slope; and t = distance from the center of mass
The coefficients a
0 and a
1
are computed using the least squares fit after regression analysis. Note that the outliers beyond twice the standard deviation from the mean are removed from the sample before regression.
As we approach near to the expected eddy boundary analogous to the specified lateral distance, subsequent normalized temperature values are compared to fit the curve equation. If a normalized value is unable to fit the curve drastically at or around the expected eddy boundary, we interpret it as a sharp temperature gradient. The iteration at which the sharp temperature gradient occurs is recognized as a potential eddy boundary. Each potential eddy region is analyzed likewise and regions having large temperature changes closest to the stipulated eddy boundary are identified as possible eddy regions.
4.3 Detecting coastal upwelling regions
Coastal upwelling regions do not have a defining shape like eddies, however as they are enclosed regions, a variation of the structuring element is employed to detect them. Since upwelling regions have temperatures lower than the waters surrounding them, it establishes the fact that they will have a sharp increase in the temperature gradient around their boundaries. A disk-shaped structuring element similar to the one presented above is created to calculate the center of mass for probable upwelling regions. The center of mass gives us a starting point to spread in all directions in order to determine the upwelling boundary. Similar to eddy detection, it is reasonable to expect that the temperature around the center of mass to remain uniform. We start at a random direction from the center of mass and keep moving outward, placing points close to the center into a curvefitting equation as described above. The limit is again kept as half of the stipulated lateral distance for forming the equation. Normalized temperature values of points beyond this limit are compared for extreme variation, i.e. if they are significant outliers (greater than 2 standard deviations) to the slope of the curve. The comparison continues to twice the estimated distance. If a significant outlier is determined that has a sharp deviation, the point is stored. Irrespective of whether an outlier is determined, the entire process is repeated after the direction is shifted by 1 degree. A set of discrete points is obtained after iterating through all 360 degrees back to the starting point.
Although we iterate through 360 degrees, only a certain number of discrete directions are obtained that depend on the size of the radius. For example, if the estimated size is
100 km, the pixel radius distance is calculated to 18 pixels, giving us 26 discrete directions for 360 degrees. If a significant outlier is obtained for a discrete direction, it is recorded as a hit. After the iteration is completed for all directions, the total number of hits is compared to the total number of discrete directions. If the hits to directions ratio is below 60% the region is rejected as an upwelling region. On the other hand, if the number of hits are significant, then the corresponding points are connected using a smooth spline and the enclosed region is identified as an upwelling region
4.4 Banded Thresholding for fine-scale features
Fine-scale features like frontal structures, mushrooms, jets and squirts neither have defining shapes nor are they classified as totally enclosed regions. Structuring elements cannot be used to effectively recognize them. We thus introduce the band thresholding methodology to detect fine-scale features like fronts and mushrooms. Ocean fronts are defined as interfaces between water masses with differing temperature, salinity and density properties.
Turbulent mixing occurs at this interface which subsequently creates a transition zone. This transition zone stimulates diverse synoptic features and vigorous biogeochemical activity. Visualization of datasets is done by placing each data point into one of many discrete bands. Pseudo-color plots for example, place data points into one of 255 possible bands. These bands are consequently used for pixel determination. Based on the fact that any dataset comprising a front will at least have 3 water types, namely the two interfacing water masses and the transition water mass, we formulate the entire dataset into 3 discrete bands. Thus we threshold the data into 3 distinct segments of data with each data point falling into one of the three bands. The band thresholds are determined as follows:
I = ( max(f) – min(f ) ) / band (5) where, ‘I’ is the band interval, and ‘f’ is a dataset, and
‘band’ is the no. of bands.
Once the banding intervals have been determined the thresholding is done as follows: T(x,y) = floor ((f(x,y) – min(f)) / I ), where ‘T(x,y)’ is the threshold data value;
‘f(x,y)’ is the actual data value
The frontal structure being a transition zone will be located at the middle band. An edge detection algorithm is used on the middle band, and the obtained edge is identified as the frontal structure.
5. Results
5.1 Monterey Bay eddy and upwelling features (SST)
The structuring element methodology described above was designed into a working application and tested on datasets for AVHRR SST datasets along the Monterey
Bay area of California, United States. Each synoptic feature was initially detected individually and subsequently a user interface was created to involve recognition of any eddy and upwelling features in an available dataset.
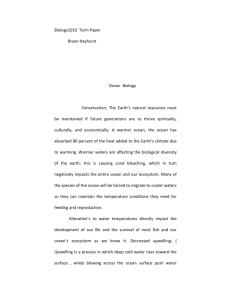
Figure 2: Original SST Plot of a data composite for
August 8, 2003 in Monterey Bay, CA.
From looking at the plot in Figure 2, we are visibly able to locate an eddy feature developing in the region of 35 o N to
36 o N and –123.5
o W to –122.5
o W. Upwelling regions can be recognized along the coastline with lower temperatures
(12 o C-15 o C) than their surrounding waters. On inspection of the SST colorbar, the core temperature of the eddy can be intuitively estimated to be about 18 o Celsius and the boundary to be a little higher at 18.5 degree Celsius. The distance of the eddy can be approximated to a 100 kilometers from the latitude information, consistent with the mesoscale nature of the eddy. The core and boundary temperatures are used to threshold the data. Thereafter the structuring element is created with the estimated eddy diameter and traversed over the entire dataset to locate eddy features. The results are plotted in Figure 3.
Figure 3: Features detected using the feature recognition system for August 8, 2003 in Monterey Bay, CA
The plot above shows the eddy region detected by our algorithm as outlined by the red circle. The upwelling regions within the original data composite are clearly visible in the data plot as shown by the regions enclosed within blue boundaries. These regions are along the coast and have water temperatures that are cooler than the
surrounding waters. Using a similar approach to eddy detection, the core temperature of the upwelling structure can be estimated as 12 o Celsius and the surrounding water as 15 o Celsius. There are 2 distinct regions however and their distance can be approximated to 50 km. These parameters are input to the recognition system and then the system is executed. The results of the detection are outlined in Figure 3, thus indicating the validity of our algorithm. The detection of the upwelling regions towards the edges is not precise and this is attributed to the shortcomings of the curve-fitting technique being currently employed. Future research will aim at a refined curve fitting algorithm.
5.2 Monterey Bay fine-scale features (SSC):
The banded thresholding method was utilized to detect the frontal feature in Figure 2. As discussed in section 5.2, the front was detected by classifying the data into 3 bands, conforming to the 3 water types that are present to create a frontal structure. The edge for the intermediate band is the front, signifying the mixed water type. The plot of the front is shown in Figure 3 as the north-south continuous line between the eddy and the upwelling regions. Banded
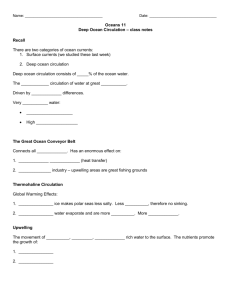
Thresholding method was executed on SeaWiFS chlorophyll_a dataset to detect a mushroom structure occurring on August 8, 2003 in Monterey Bay. Mushroom vortices are very intriguing set of oceanographic phenomenon common to eastern boundary current regions, and plays a dynamic role in carrying warm waters from offshore to onshore regions (Mied et al). identified in the ocean color dataset (Figure 4) goes unnoticed to the naked eye in the SST dataset (Figure 2) for the same region. Thus our system provides a platform to combine both ocean color and SST datasets that could result in detection of invisible features in either of the datasets.
5.3 Gulf of Mexico eddy features.
The recognition system, as described above, was tested on
MODIS chlorophyll a datasets for the Gulf of Mexico region.
Mushroom
Figure 4: Original Ocean Color Plot of a data composite for August 8, 2003 in Monterey Bay, CA.
The mushroom is visibly forming in the region of 36.2
o N to 36.6
o N and –123.5
o W to –123.0
o W. This feature was detected in the SeaWIFS Chlorophyll image (Fig. 4) and then overlaid onto the AVHRR SST plot in Figure 3, just above the detected eddy. This result highlights a dynamic feature of our recognition system. The mushroom feature
Figure 5: Eddy detected using the feature recognition system for March 18, 2002 in Gulf of Mexico.
The high chlorophyll concentration between 20 o N to 21 o N and–95 o W to –93 o W shows a region of high biological productivity, signifying the presence of turbulent waters and a signature that is conclusive of an eddy. The input parameters are set to core chlorophyll content at 0.5 mg/m 3 and boundary content to be 0.45 mg/m 3 . The distance is approximated to 100 km. These results (Figure
5) establish that the recognition system is data independent and can be used to perform detection on any scientific dataset.
5.4 A User Interface
The detection of eddies and upwelling regions use separate algorithms as mentioned earlier, thus an interface is required to represent all identified regions to a single platform. This is facilitated by the development of an interactive interface that will allow the users to communicate with the system without being concerned about implementation details. The interface design is available at www.cis.umassd.edu/~achaudhuri . Some of the salient features of the interface are (1) Users can load the scientific dataset using the interface. A successful load will automatically display a plot of the data to an image panel and provide spatial (latitudinal and longitudinal)
information for the same. (2) Users can zoom manually or automatically into any segment of the image they wish to analyze. (3) Users can provide input information to the system such as core temperature, boundary temperature and diametric distance of features they wish to identify.
(4) The results of detection will be illustrated in the image panel. The users could extract information on the identified region of interest onto a data file for further analysis.
6. Summary and future work
In summary, we have presented an automated approach to identify and detect oceanographic features from high resolution satellite images of SST and chlorophyll_a. Our approach relies on a set of input values about the features of interest. Our algorithm is based on prior oceanographic knowledge of these ‘features’ and image processing technqies such as structuring element and banded thresholding . We have shown two applications in
Monterey bay and Gulf of Mexico. Additionally we have presented a case where our algorithm can be used for both
SST and ocean color to extract more information than each of the individual images.
In perspective, our future plan involves addressing the following specific task-oriented scientific objectives: (1) enhancing the structuring element technique to obtain accurate contours of the physical mesoscale features, as well as introduce statistical techniques such as clustering to augment the banded thresholding method for fine-scale structures; (2) providing further evidence of our system as a correlating platform amongst SST and Ocean Color datasets, resulting in identification of invisible physical ocean structures; (3) designing a feature-tracking algorithm by using visualization techniques such as 2-D motion analysis mechanisms; (4) utilizing extracted feature observations in interpreting physical sub-surface flow based on current feature-oriented modeling techniques and (5) exporting of the user interface into an open-ended web application to provide quantitative feature related information using this system for nowcasting and forecasting. We plan on incorporating intelligent pattern recognition algorithms and classification methods, such as decision trees and
Bayesian classifiers into our design. Our plan is to perform extensive training of our algorithm on a 11-year
SST daily climatology in the western North Atlantic and eastern North Pacific.
7. Acknowledgement
This research was supported by the Office of Naval
Research grants N00014-03-1-0411 and N00014-03-1-
0206 at the University of Massachusetts Dartmouth.
8. References
[1] A. Gangopadhyay, A.R. Robinson, and H.G. Arango,
Circulation and Dynamics of the Western North Atlantic,
I: Multiscale Feature Models . Journal of Atmospheric and
Oceanic Technology, 14 (6), 1997, 1314-1332.
[2] A. Gangopadhyay, A.R. Robinson, P.J. Haley, W.J.
Leslie, C. J. Lozano, James J. Bisagni, and Z. Yu, Feature
Oriented Regional Modeling and Simulation (FORMS) in the Gulf of Maine and Georges Bank, Continental Shelf
Research, 23 (3-4), 2003, 317-353
.
[3] A. Gangopadhyay, and A.R. Robinson, Feature oriented regional modeling of Oceanic Fronts, Dynamics of Atmosphere and Oceans , 36 (1-3), 2002, 201-232.
[4] A.Gangopadhyay and A.R. Robinson, Circulation and
Dynamics of the Western North Atlantic, III: Forecasting the Meanders and Rings. Jour. of Atmospheric and
Oceanic Technology , 14 (6), 1997, 1352-1365.
[5] W.S. Brown, A. Gangopadhyay, F.L. Bub, Z.Yu,
G.Strout, and A. Robinson, An operational system for nowcasting and forecasting Gulf of Maine Circulation,
Submitted to Journal of Marine Systems , 2004.
[6] Balasubramanian, R., A. Tandon, B. John and V.
Sood, Detecting and Tracking of Mesoscale Oceanic
Features in the Miami Isopycnic Circulation Ocean
Model.
The IASTED International Conference on
Visualization, Imaging, and Image Processing VIIP ,
Benalmedena, Spain, 2003, 169-174.
[7] Li P., Supercomputing Visualization for Earth Science
Datasets .
Proceedings of 2002 NASA Earth Science
Technology Conference , Pasadena, CA, 2002.
[8] Wallcraft A.J, Hurlbert H. E, Metzger E.J, Rhodes R.
C.,Shriver J.E, Real-time Ocean Modeling System,
Computing in Science and Engineering, IEEE Computer
Society and American Institute of Physics , 2002, 4 (2),
50-57.
[9] Lehner, S., J. Schulz-Stellenfleth, B. Schattler, H.
Breit and J. Horstmann, Wind and wave measurements using complex ERS-2 SAR wave mode data, IEEE Trans.
Geosci. Rem. Sens.
, 2000, 38 (5), 2246-2257.
[10] D. Silver and Xin Wang, Volume Tracking,
Proceedings of IEEE Visualization , San Francisco, CA,
1996, 157-164.
[11] K.H. Brink, R.C. Beardsley, J.Paduan, R.
Limeburner, M.Caruso, and J.G. Sires, A view of the
1993-1994 California Current based on surface drifters, floats, and remotely sensed data, Journal of Geophysical
Research , 2000, 105 (C4), 8575-8604.
[12] J.F. Cayula and P. Cornillon, Edge detection
Algorithm for SST images, Journal of Atmospheric and
Oceanic Technology , 1992, 9 (1), 67-80.