WLTP-11-07e - Revised GTR text anne…
advertisement

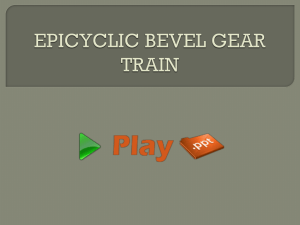
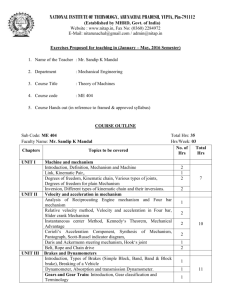
WLTP-11-7e Revised text Annex 2, including crawler gear requirements, delivered by the gearshift issues task force (revised text is highlighted in yellow) Annex 2 Gear selection and shift point determination for vehicles equipped with manual transmissions 1. General approach 1.1. The shifting procedures described in this Annex shall apply to vehicles equipped with manual shift transmissions. 1.2. The prescribed gears and shifting points are based on the balance between the power required to overcome driving resistance and acceleration, and the power provided by the engine in all possible gears at a specific cycle phase. 1.3. The calculation to determine the gears to use shall be based on engine speeds and full load power curves versus engine speed. 1.4. For vehicles equipped with a two-range transmission (low and high), only the range designed for normal on-road operation shall be considered for gear use determination. 1.5 This annex shall not apply to vehicles tested according to Annex 8. 2. Required data and precalculations The following data is required and calculations have to be performed in order to determine the gears to be used when driving the cycle on a chassis dynamometer: 2.1 Prated , the maximum rated engine power as declared by the manufacturer, kW 2.2 nrated, the rated engine speed at which the engine develops its maximum power. If the maximum power is developed over an engine speed range, nrated is determined by the minimum of this range, min-1 2.3 nidle , idling speed, min-1 2.4 ng – number of forward gears The forward gears in the transmission range designed for normal on-road operation shall be numbered in descending order of the ratio between engine speed in min-1 and vehicle speed in km/h (n/v). Gear 1 is the gear with the highest n/v ratio, gear ng is the gear with the lowest ratio. ng determines the number of forward gears. 2.5 ndvi is the ratio obtained by dividing the engine speed n by the vehicle speed v for each gear i, i = 1 to ng, min-1/km/h; 2.6 f0 , f1 , f2 , driving resistance coefficients as defined in Annex 4 in N, N/(km/h), and N/(km/h)² respectively; 2.7 Determination of nmax nmax_95 is the minimum engine speed where 95 per cent of rated power is reached, min-1; 1 nmax(ngvmax) = ndv(ngvmax) × vmax,cycle (1) where: ngvmax as defined in section 2.9 vmax,cycle is the maximum speed of the vehicle speed trace according to Annex 1, km/h; nmax is the maximum of nmax_95 and nmax(ng), min-1 2.8 Pwot(n) - is the full load power curve over the engine speed range from nidle to nrated or nmax, or ndv(ngvmax) x vmax, whichever is higher. ndv(ngvmax) is the ratio obtained by dividing the engine speed n by the vehicle speed v for the gear ngvmax, min-1/km/h; The power curve shall consist of a sufficient number of data sets (n, Pwot) that the calculation of interim points between consecutive data sets can be performed by linear interpolation. The first data set shall be at nidle. There is no need for the data sets to be equally spaced. 2.9 Determination of ngvmax ngvmax, the gear in which the maximum vehicle speed is reached, and is determined as follows: If vmax(ng) ≥ vmax(ng-1), then, ngvmax = ng otherwise, ngvmax = ng -1 (2) where: vmax(ng) is the vehicle speed at which the required road load power equals the available power Pwot in gear ng (see figure 1a). vmax(ng-1) is the vehicle speed at which the required road load power equals the available power Pwot in the next lower gear (see figure 1b).. The required road load power, kW, shall be calculated as follows: Prequired = f0 ×vmax+ f1 ×vmax²+ f2 ×vmax³ 3600 (3) where: v is the vehicle speed, km/h. The available power at the vehicle speed v in gear ng or ng - 1 can be determined from the full load power curve Pwot(n) by using the relation nng = ndvng x v; nng-1 = ndvng-1 x v (4) and by reducing the power values of the full load power curve by 10%, analogous to the following sections. 2.10 Exclusion of a crawler gear Gear 1 can be excluded on request of the manufacturer, if the following conditions are fulfilled: (a) The vehicle does not have a two- range transmission, (b) The vehicle is homologated to tow a trailer, (c) (ndv1 / ndv(ngvmax)) x (vmax x ndv(ngvmax) / nrated) > 7, (d) (ndv2 / ndv(ngvmax)) x (vmax x ndv(ngvmax) / nrated) > 4, 2 (e) The vehicle can pull away five times within four seconds in a total of five minutes on a gradient of 12% in gear 2 at a mass of mr + 25 kg + (GTM – mr – 25 kg)*0.28. (5) where: ndv(ngvmax) is the ratio obtained by dividing the engine speed n by the vehicle speed v for the gear ngvmax, min-1/km/h; mr is the mass in running order, kg; GTM is the gross train mass (gross vehicle mass + max. trailer mass), kg. In this case gear 1 is not used when driving the cycle on a chassis dynamometer and the gears shall be renumbered starting with the second gear as gear 1. 2.11 Definition of nmin_drive nmin_drive is the minimum engine speed when the vehicle is in motion, min-1 for ngear = 1, nmin_drive = nidle, (6) for ngear = 2, for transitions from 1st to 2nd gear during accelerations from standstill: nmin_drive = 1.15 ×nidle for all other driving conditions: nmin_drive = 0.9 x nidle, (7) for ngear > 2, nmin_drive is determined by : nmin_drive = nidle + 0.125 ×( nrated -nidle ) (8) Higher values may be used if requested by the manufacturer. 2.12 TM, test mass of the vehicle, kg. 100 ngvmax = 6 90 80 70 P in kW 60 50 40 30 Pres 0.9*Pwot, gear 1 0.9*Pwot, gear 2 0.9*Pwot, gear 3 0.9*Pwot, gear 4 0.9*Pwot, gear 5 0.9*Pwot, gear 6 20 10 vmax(gear 6) vmax(gear 5) 0 0 10 20 30 40 50 60 70 80 90 100 110 120 130 140 150 160 170 180 190 200 210 vehicle speed in km/h 3 Figure 1a: Example, where ngvmax is the highest gear 100 ngvmax = 5 90 80 70 P in kW 60 50 vmax(gear 5) 40 vmax(gear 6) 30 Pres 0.9*Pwot, gear 1 0.9*Pwot, gear 2 0.9*Pwot, gear 3 0.9*Pwot, gear 4 0.9*Pwot, gear 5 0.9*Pwot, gear 6 20 10 0 0 10 20 30 40 50 60 70 80 90 100 110 120 130 140 150 160 170 180 190 200 210 vehicle speed in km/h Figure 1b: Example, where ngvmax is the second highest gear 3. Calculations of required power, engine speeds, available power, and possible gear to be used 3.1. Calculation of required power For each second j of the cycle trace, the power required to overcome driving resistance and to accelerate shall be calculated using the following equation: 3 f0 ×vj +f1 ×v2 j +f2 ×vj Prequired,j = ( 3600 )+ kr×aj ×vj ×TM (8) 3600 where: f0 is the constant road load coefficient, N; f1 is the first order road load coefficient, , N/(km/h); f2 Prequired,j is the second order road load coefficient,, N/(km/h)²; is the required power at second j, kW; vj is the vehicle speed at second j, km/h; aj is the vehicle acceleration at second j, m/s², aj = (vj+1 −vj ) 3.6×(tj+1 −tj) ; (9) TM kr 3.2. is the vehicle test mass, kg; is a factor taking the inertial resistances of the drivetrain during acceleration into account and is set to 1.03. Determination of engine speeds 4 For any vj ≤ 1 km/h, it shall be assumed that the vehicle is standing still and the engine speed shall be set to nidle .The gear lever shall be placed in neutral with the clutch engaged except 1 second before beginning an acceleration phase from standstill where first gear shall be selected with the clutch disengaged. For each vj ≥ 1 km/h of the cycle trace and each gear i, i = 1 to ng max , the engine speed, ni,j ,shall be calculated using the following equation: ni,j = ndvi × vj 3.3. (10) Selection of possible gears with respect to engine speed The following gears may be selected for driving the speed trace at v j: (a) all gears i < ngvmax where nmin_drive ≤ ni,j ≤ nmax_95, and (b) all gears i ≥ ngvmax where nmin_drive ≤ ni,j ≤ nmax(ngvmax) If aj ≤ 0 and ni,j drops below nidle, ni,j shall be set to nidle and the clutch shall be disengaged. If aj > 0 and ni,j drops below (1.15 × nidle), ni,j shall be set to (1.15 × nidle) and the clutch shall be disengaged. 3.4. Calculation of available power The available power for each possible gear i and each vehicle speed value of the cycle trace, vi , shall be calculated using the following equation: Pavailable_i,j = Pwot (ni,j ) × (1 − (SM + ASM)) (11) where: Prated is the rated power, kW; Pwot is the power available at ni,j at full load condition from the full load power curve; SM is a safety margin accounting for the difference between the stationary full load condition power curve and the power available during transition conditions. SM is set to 10 per cent; ASM ASM is an additional exponential power safety margin, which may be applied at the request of the manufacturer. ASM is fully effective between nidle and nstart, and exponentially approaching 0 at nend as described by the following requirements: If n ≤ nstart, then ASM = ASM0, (12) If n > nstart, then: ASM = ASM0 x exp(ln(0.005/ASM0) × (nstart – n)/(nstart – nend)) (13) ASM0, nstart and nend shall be defined by the manufacturer but shall fulfil the following conditions: nstart ≥ nidle, nend > nstart. 3.5. Determination of possible gears to be used 5 The possible gears to be used shall be determined by the following conditions: (a) The conditions of paragraph 3.3. are fulfilled, and (b) Pavailable_i,j ≥ Prequired,j The initial gear to be used for each second j of the cycle trace is the highest final possible gear, i_max. When starting from standstill, only the first gear shall be used. 4. Additional requirements for corrections and/or modifications of gear use The initial gear selection shall be checked and modified in order to avoid too frequent gearshifts and to ensure driveability and practicality. An acceleration phase is a time period of more than 3 seconds with a vehicle speed ≥ 1 km/h and with monotonic increase of vehicle speed. A deceleration phase is a time period of more than 3 seconds with a vehicle speed ≥ 1 km/h and with monotonic decrease of vehicle speed. Corrections and/or modifications shall be made according to the following requirements: (a) If a lower gear is required at a higher vehicle speed during an acceleration phase, the higher gears before shall be corrected to the lower gear. Example: v_j < v_(j+1) < v_(j+2) < v_(j+3) < v_(j+4) < v_(j+5) < v_(j+6). The originally calculated gear use is 2, 3, 3, 3, 2, 2, 3. In this case the gear use shall be corrected to 2, 2, 2, 2, 2, 2, 2, 3. (b) Gears used during accelerations shall be used for a period of at least 2 seconds (e.g. a gear sequence 1, 2, 3, 3, 3, 3, 3 shall be replaced by 1, 1, 2, 2, 3, 3, 3, 3). Gears shall not be skipped during acceleration phases. (c) During a deceleration phase, gears with ngear > 2 shall be used as long as the engine speed does not drop below n min_drive. If the duration of a gear sequence is only 1 second, it shall be replaced by gear 0 and the clutch shall be disengaged. If the duration of a gear sequence is 2 seconds, it shall be replaced by gear 0 for the 1st second and the next lower gear for the 2nd second with the gear that follows after the 2 second period. The clutch shall be disengaged for the 1st second. Example: A gear sequence 5, 4, 4, 2 shall be replaced by 5, 0, 2, 2. (d) The second gear shall be used during a deceleration phase within a short trip of the cycle as long as the engine speed does not drop below 0.9 × nidle. If the engine speed drops below nidle, the clutch should be disengaged. (e) If the deceleration phase is the last part of a short trip shortly before a stop phase and the second gear would only be used for up to two seconds, the gear shall be set to 0 and the clutch may be either disengaged or the gear lever placed in neutral and the clutch left engaged. A downshift to first gear is not permitted during those deceleration phases. (f) If gear i is used for a time sequence of 1 to 5 seconds and the gear before this sequence is lower and the gear after this sequence is the same as or lower than the gear before this 6 sequence, the gear for the sequence shall be corrected to the gear before the sequence. Examples: (i) gear sequence i − 1, i, i − 1 shall be replaced by i − 1, i − 1,i − 1; (ii) gear sequence i − 1, i, i, i − 1 shall be replaced by i − 1, i − 1, i − 1, i − 1; (iii) gear sequence i − 1, i, i,i, i − 1 shall be replaced by i − 1, i − 1,i − 1, i − 1, i − 1; (iv) gear sequence i − 1, i, i, i, i, i − 1 shall be replaced by i − 1, i − 1, i − 1, i − 1, i − 1, i − 1; (v) gear sequence i − 1, i, i, i, i, i, i − 1 shall be replaced by i − 1, i − 1, i − 1, i − 1, i − 1, i − 1, i − 1. In all cases (i) to (v), g min ≤ i shall be fulfilled; Paragraphs 4.(a) to 4.(f) shall be applied in sequentially scanning the complete cycle trace. and only after each has completely finished scanning the gear profile. Since the above modifications may create new gear use sequences, which are in conflict with these requirements, the gear sequences shall be checked for practicality three times and modified, if necessary. 7