Learning About Fields by Finite Element Analysis

Learning About Fields by Finite Element
Analysis
Gunnar Backstrom
Department of Physics, University of Umeå, S-901 87 Umeå, Sweden and
National Agency for Higher Education, S-103 99 Stockholm, Sweden
ABSTRACT
The partial differential equations of physics have remained notoriously obscure elements of the academic curriculum, not because they should be difficult to derive or understand but because so few exact solutions can be obtained in closed form. To those who have considered the field equations impressive but virtually useless, the news that they now can be easily solved on a PC should be welcome. Several commercial programs have become available which permit us to exploit the power of finite element analysis without writing complicated code. Any student who is familiar with the differential form of classical field theory can write a short problem descriptor, specifying the equation, and the shape and functional conditions at the boundary. The problem is then solved automatically and the result appears in the form of plots as requested. The short time spent to learn the syntax is offset by the usefulness of the software, which extends from vector analysis, via electric and thermal conduction, electro- and magnetostatics, elasticity, fluid flow, and vibrations, to electromagnetic waves and quantum mechanics.
I. INTRODUCTION
Differential equations are at the heart of physics education, since many of the laws of physics are presented in the form of ordinary or partial differential equations. As is well known, a difficulty which arises with education is that these equations can be solved exactly only in relatively simple physical situations, or by means of approximations such as the small-angle solution for the simple pendulum. Methods of numeric calculation offer a way round this difficulty of mathematical solution and one such method, finite element analysis
(FEA), is the subject of the present article.
The advent of the personal computer (PC) has profoundly changed the overall conditions of academic education in science and engineering, since most students can have access to a powerful system for numeric calculations. Software packages for such purposes abound, and they have become progressively easier to use. The plotting facilities which are included in such packages are convenient and remarkably efficient. Academic education in physics should include and exploit these contemporary developments in view of both the immediate educational advantage and the conditions which the students of today will experience in their future work environment.
The specific area under consideration here is that of partial differential equations (PDEs), which have taken longer than ordinary differential equations to become readily accessible to numeric resolution. The method of FEA for second-order PDEs has been known for several decades, but a few years ago it was still necessary to write FORTRAN or similar code to exploit this powerful technique. Graphics routines also had to be programmed to present
1
solutions and their related functions in digestible form. However, the present-day situation as regards FEA is completely different.
Flexible PDE solvers and graphics generators are available in the form of “black boxes”, and the user does not need to come to grips with the details of the underlying numerical algorithms in order to profit from the extreme power of these tools. What he does need to do is to specify the problem in terms of the pertinent PDE(s), the geometry of the boundary, the conditions on this boundary, and also the relevant materials properties. In using such solvers, the PDE(s) are typically entered in a text format which is close to familiar mathematical usage. Even non-linear PDEs can be solved in many situations. In most cases, a problem can be specified as a list of instructions within an hour and solved within minutes on a reasonably up-to-date PC. Graphics presentation is powerful and easy to use.
Employing black-box software to solve PDEs, as advocated here, is certainly not in the tradition of mainstream mathematical physics education. It is obvious that a question of vital importance is whether such a procedure is advantageous or disadvantageous in relation to physics education and the interests of the students. Educational implications will be considered in some detail later on in this paper, but the essential argument in favor of using
FEA may be simply stated here, as follows. In a given physical situation, the real physics of the problem lies in formulating the pertinent PDE(s) and in specifying the boundary conditions and relevant materials parameters. Thereafter, what is required to produce results is purely and simply a matter of mathematical manipulation, which may or may not be possible in practice using traditional symbolic methods in a given situation. In the procedure advocated here, FEA takes over the mathematical stage of the analysis and produces concrete, numerical results in the specified situation, even in situations which are difficult to handle using traditional mathematical methods. The student is thus able to explore a physical problem in much greater detail and is also able to tackle a much wider range of problems than would be feasible using traditional methods. This summarizes the essential advantages of using FEA. The real physics is preserved whilst the impediments which may arise by using traditional mathematical methods are circumvented. If a student wishes to be satisfied that the results obtained by using the FEA method are in fact reliable, then he can readily do this by applying the methods to a situation where an exact solution is also available, and comparing the results. Such exercises also serve to enhance the physics education process.
It would be impossible to describe concretely what is involved in FEA calculations without referring to an existing software package. There are several such programs available for personal computers
1,2,3,4
, but only for two
1,2
of them reasonably complete textbooks
5,6,7 are available at the present time. These programs, FlexPDE
®
and PDEase
®
2d, accept problem descriptors of the same format, and although the textbooks are based specifically on FlexPDE any of these two programs could be used. FlexPDE is more recent and is expressly written for
Windows 95/NT. PDEase earlier ran under DOS but has recently been embedded in a shell for Windows 95/NT.
An attractive feature of these FEA programs is that they are general enough to be applied to virtually any branch of physics and technology. The modest time spent learning the syntax may thus be reused throughout the curriculum, from vector analysis and PDE theory in mathematics to electro- and magnetostatics, heat transfer, fluid flow, elastic deformation, vibration, electromagnetic waves and various eigenvalue problems including those in quantum mechanics.
What follows are a number of simple illustrative examples of how FlexPDE or PDEase can be implemented, together with some remarks on the author’s experience of using the software in physics education. The intention is to demonstrate the academic potential of FEA, with no more than an indication of how programs are constructed in practice.
2
II. VECTOR ANALYSIS
Courses on classical field theory generally start with a presentation of the concepts and results of vector analysis. Students often consider this part to be difficult - or even useless - until they have seen some concrete applications. Here, the most primitive layer of the FEA package becomes useful, i.e. that for plotting a given function f x y . In the present section, the equation-solving part of the package is not yet brought into use.
Any problem to be solved is specified by means of a descriptor , which is simply a program written in the command language of the package. Keywords (shown in upper-case in the example below) head sections which specify the overall structure and determine the order in which the input is to be typed. Characters within curly brackets, {...}, constitute comments which have no effect on the execution of the descriptor. With SI units being tacitly assumed, the physical situation here is that of a disk of radius r1 lying in the ( x , y ) plane and rotating with the angular velocity omega about the origin. The location and size of the disk are specified by region ‘domain’ under BOUNDARIES together with the value of r1 under
DEFINITIONS. The latter section also specifies a very simple vector function v in a BASIClike notation. The operator dx is the symbol for the partial derivative operator
x , which we use to define the related functions div_v and curlz_v . The feature under BOUNDARIES, labeled ‘inner’, is simply a circle of radius 0.3 with its center at (0.2, 0).
The form of the output is specified by the PLOTS section and various types of plots are available. A contour plot consists of a set of lines, each of which corresponds to a particular constant value of the quantity being plotted. A vector plot shows a set of arrows indicating the field direction, the length of an arrow showing the magnitude of the vector. A surface plot shows the height (above the xy -plane) of the function being plotted.
TITLE
'Rotating Disk'
DEFINITIONS
r0= 0.2 r1= 1.0 r2= 0.3
omega= 1.0
{ curl.pde }
{ SI units }
{ Radii }
{ Angular velocity }
rad= sqrt(x^2+y^2)
vx= -omega*y vy= omega*x
v= vector( vx, vy)
vabs= sqrt(vx^2+vy^2)
{ Radius }
{ Velocity }
{ Define v as a vector }
{ Magnitude of v } div_v= dx(vx)+ dy(vy) curlz_v= dx(vy)- dy(vx)
BOUNDARIES region ‘domain’
start 'outer' (r1, 0) arc(center= 0,0) angle= 360 to finish feature
start 'inner' (r0+r2, 0) arc(center= r0, 0) angle= 360
PLOTS
contour( vx)
vector( v) contour( vy) contour( vabs)
surface( vabs)
contour( curlz_v) contour( div_v)
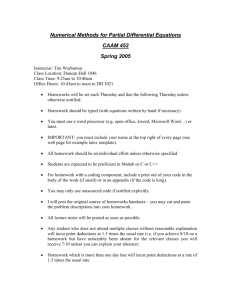
elevation( tangential( v)/ (pi*r2^2)) on 'inner'
END
An elevation plot is a curve showing the height of a surface above the ( x,y ) plane along a specified line, here a circle labeled ‘ inner ’, and this plot is shown in the figure below. This type of plot automatically yields the integral under the curve, which enables us to estimate the z -component of curl( v ) z at the center of ‘ inner
’ from the Stokes definition,
3
lim
1 s
It can be seen from the figure that the value of the integral is close to 2, in agreement with what we find by exact means. The plot of div_v yields zero, as expected.
Exercises of this kind may be varied almost ad infinitum , and for the remainder of this section the reader should consult reference 5 for details. For instance, the divergence may be estimated in a similar way by integrating the normal component of v . In the beginning of a course on vector analysis it is advantageous to use the elementary derivative definitions for the operators as shown in the descriptor. At a later stage, one may prefer to use the alternative short forms grad( U ), div( v ) and curl( v ), which are also available in the programs.
As a preparation for the following section on Laplace equations it is illuminating to plot real or imaginary parts of complex functions, which may be generated in great variety starting from elementary functions of z . The software permits us to show that such harmonic functions have vanishing div( grad( U )) and that they obey the Cauchy relations.
Before starting to solve PDEs it may be of pedagogic interest to extend the graphic studies to real fields, such as gravitational fields from planetary masses. The region between the
Earth and the Moon is fascinating, as well as the interior of the Earth.
Another fruitful line of study concerns the electrostatic potential due to point charges.
Two equal charges of opposite signs may for instance be combined into a dipole of finite size, but still negligibly small, say 10
6 , compared to the extension of the field. This system could also be analyzed using cylindrical coordinates.
4
III. LAPLACE TYPE OF EQUATIONS
The Laplace equation in its original form,
2 U
0 , may be solved exactly in many situations. In realistic cases, however, it must be generalized to allow for space-varying materials properties. For instance, the equation for electric conduction in a solid without volume charges could be written
U
0 where
may be a function of ( , ) , continuous or discontinuous. Heat conduction without internal sources obeys the same equation, with
replaced by the thermal conductivity. The same equation is also valid in a dielectric without free charges, but the materials property is then the permittivity
.
As an illustration we calculate the field around a metallic rod, carrying a known total charge. No exact solution appears to exist in this case. Since this problem is axisymmetric,
z .
1
U
z
U
z
0
Using r for the coordinate
, we only need to type the following descriptor.
TITLE
'Charged Rod in (r,z) Space'
{ rod.pde }
SELECT
errlim= 1e-5
COORDINATES
ycylinder('r','z')
{ Requested relative accuracy }
{ Cylindrical coordinates, axial symmetry }
VARIABLES
U
D1= Q/ (4*pi*r1^2)
{ Dependent variable, potential }
DEFINITIONS
r0= 0.02 r1= 1.0 L2= 0.1
eps= 8.854e-12 Q= 1e-9
{ Half-length }
{ Charge on rod }
{ Normal component on sphere }
D= -eps* grad(U)
EQUATIONS
Dm= magnitude(D)
(1/r)* dr( -r*eps*dr( U))+ dz( -eps*dz( U))= 0
BOUNDARIES region 'domain'
start 'outer' (0,-r1) natural(U)= D1 arc(center= 0,0) angle= 180
natural(U)= 0 line to (0,L2)
value(U)= 0 line to (r0, L2) to (r0,-L2) to (0,-L2)
natural(U)= 0 line to finish feature
start 'rod' (0,L2) line to (r0, L2) to (r0,-L2) to (0,-L2)
PLOTS
contour( U) zoom(0,-2*L2, 4*L2,4*L2)
elevation( Dm) on 'rod'
END
In the definitions segment we supply the constants and functions of the problem. The charge on the rod determines the flux of D n
leaving the outer boundary, which we take to be spherical of suitably large radius r1 .
5
Under boundaries we not only define the geometry but also the boundary conditions. Here natural ( U ) specifies the outward normal derivative, in this case D n the PDE operate on
U /
and
U /
z
since the derivatives in
. This derivative must reduce to zero on the axis for reasons of symmetry.
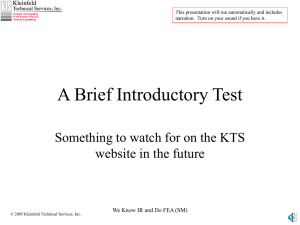
The following figure shows a plot of the potential U , zoomed on the region close to the rod.
The next figure shows the plot of D , which is equal to D n
on the surface of the rod and hence indicates the charge per unit area. We may easily integrate this density over the cylinder to obtain the total charge, for comparison with the input value Q . The descriptor requires only a slight modification for an object with conical, half-spherical or elliptical ends.
6
IV. POISSON TYPE OF EQUATIONS
This PDE is similar to the Laplace equation, except that is has a source term. In electrostatics the source is a volume distribution of non-dielectric charges
v
, and the relation
U
v
applies. In the case of a temperature field we have a similar equation, but the source term expresses heating power per unit volume.
A
Magnetostatic problems also lead to this type of PDE. If we introduce a vector potential
, defined by B
A , we obtain the equation
1
A z
J z
, in ( , ) space. This equation can be used to model a set of z -directed, current-carrying wires of arbitrary cross-sections in an environment of space-varying permeability. The variable A z should then be declared to be constant (0) on the outer boundary, in order to enclose the field
B completely within the domain.
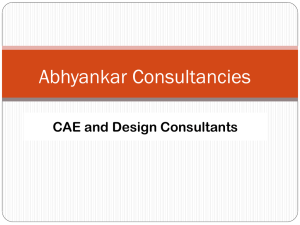
The PDE required to model the field around a pair of Helmholtz coils is only slightly more complicated. In a cylindrical coordinate system the descriptor PDE reads dr[ 1/(mu*r)* dr( r*A_phi)]+ dz[ (1/mu)*dz( A_phi)]= - J_phi where r is the radial and z the axial coordinate. In the boundaries segment we represent the coils by two squares with a specified current density J
B
. After solving and applying
A , we obtain a plot of the magnitude of B , as shown below.
7
The next figure shows the direction of B as well as the magnitude (color-coded).
8
The magnetic induction B and the current density J
being known, we may also calculate the forces acting on one of the coils. Integrating the axial component of the Lorentz force over the volume of the coil we obtain the net force. The total radial force vanishes for symmetry reasons, but we may still calculate the hoop stress from the radial force per unit length of the circular coil by integrating the radial force component over the cross-sectional area.
V. ELASTIC DEFORMATION
Elasticity seems to receive ever diminishing attention in physics curricula, although its role in everyday life is conspicuous. Elasticity may be considered difficult, obscured as it is by graphical procedures from the 1800s and a deluge of disparate engineering approximations. The basic equations are, however, quite simple and succinct
9
In 2D the strains ( , )
.
are related to the local displacements u and v in the x and y directions by
x
u x
,
y
v y
, and
xy
v x
u y
Under the assumption of vanishing stress ( yields, for the other stress components ( , )
) in the z direction (plane stress) Hooke’s law
,
x y
1
E
2
x
y
x
y
T
T
, xy
G
xy
9
where G
E / (
)
, the Poisson ratio, and E the elastic modulus. The temperature T may vary in space, and the increment
T refers to a reference level of 300 K. The linear thermal expansivity is denoted by
.
The equilibrium equations for a volume element are
x
x
x xy
xy
y
y
y
F x
0
F y
0 where F x
and F y
are possible volume forces (say, gravity). Combined with the above relations this system immediately gives us the PDEs for the components u and v of the displacement. In a problem descriptor, the expressions for strain and stress may be included in the definitions segment, and hence the equations required take the simple form
EQUATIONS dx( sx) + dy( sxy) = 0 dx( sxy)+ dy( sy) = 0 in the case of vanishing volume force.
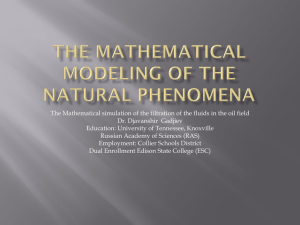
As an illustration we consider the deformation of a short beam, fixed at the left end and loaded by its own weight. The following contour plot displays the distribution of shear stress in the beam.
10
For engineering students, this basic approach to elasticity should serve to clarify the concepts, but it is also interesting to verify exact and approximate solutions, where available, as well as to solve problems which have no analytic solution.
VI. VISCOUS FLOW
Irrotational flow is best studied by a potential method, which leads to the Laplace equation and can easily be solved by FEA. Viscous flow, however, involves finite curl( ) , and the Navier-Stokes equation applies. The full version of it is
u t
( u
) u F p
2 u
0 where
is the density, p the pressure, u the velocity and F the volume force. It assumes a simpler form in the stationary state, with the first term neglected. In Cartesian coordinates and with vanishing volume forces it reads
11
u
u
u x v x
u v
y v v
y
p x p
y
2 u x 2
2 v x
2
2
2 u y y v
2
2
0 where u and v are the Cartesian components of u .
Combining the Navier-Stokes equation for constant density
with the equation of continuity,
0, we find
2 p x
2
2 p y
2
2
u x
2
u y
v x
0
We have thus obtained equations for the velocity components ( , ) and for the pressure p .
Although we have used the equations of continuity it does not follow, however, that the solution obtained will obey the equation
0. In order to take this condition into account we need to use a device known as a penalty function . This means adding the term f
u to the last PDE, using a suitably large value for the factor f . This is an acceptable way out of a difficult situation, and many problems may be solved, in ( , )
z space.
The plot below shows what we obtain on solving the above system of three PDEs for a viscous liquid flowing between parallel walls with a lateral cavity. We notice that the velocity vanishes on the boundary, as required.
12
VII. TIME DEPENDENT EQUATIONS
It is easy to solve a time-dependent PDE where the time derivative is of first order, such as the following equation for heat transfer.
c p
T
t
0
Here, h is the heat source term and
c p
the heat capacity per unit volume.
As an example of transient conduction we take a block of pine wood with a bore along a center line. The bore is made across the fiber of the wood, which means that the thermal conductivity will depend on the direction of flow (
x y
) . The block is insulated and initially at 300 K. From time zero, 400 K is enforced on the inner surface. The generalized
PDE for this problem is
x
x
x
y
y
y
c p
T
t
0
The corresponding descriptor is similar to previous ones, except for a few lines which are peculiar to time-dependence, as indicated below.
13
...
INITIAL VALUES temp= 300
EQUATIONS dx( -kx*dx( temp))+ dy( -ky*dy( temp))+ rcp* dt(temp)= 0
...
TIME
0 to 3000
PLOTS for t= 200, 300, 500, 1000, 3000 contour( temp)
END
The plot below shows the temperature distribution after 3000 s, clearly revealing the anisotropy.
Time-sinusoidal solutions may be obtained efficiently for a large family of PDEs. For instance, the above PDE for heat conduction may be transformed by taking
T
( T r
i T i
) exp(
)
On substituting this expression for T the PDE becomes complex, but the time may be eliminated. After separating it into real and imaginary parts we are left with a system of
PDEs.
14
(
(
T
T i r
)
)
h
0
c T r c T i
0
0
In the case of a complex solution we declare two variables as dependent, in this case T r
and
T i
, and we must specify boundary conditions for both of them. Otherwise, the practical procedure for solving the PDEs is similar. Although the result is a complex function, the temperature is of course real, and we may take it to be the real part, as is common in AC circuit theory.
T
Re
T r
i T i
exp(
)
T r cos(
t )
T i sin(
t )
With this interpretation we obtain an oscillating solution with amplitude factors depending on x and y . In this example of thermal conduction, with harmonic boundary conditions or volume heating, we obtain a solution corresponding to a strongly attenuated temperature wave.
Another interesting example of time-sinusoidal solutions is provided by the Helmholtz equation for a plane electromagnetic wave in a conducting material. The complex PDE is
2
E z
2
E z
i
E z
0 which may be separated into two equations as before, one for the real and one for the imaginary part. Introducing oscillatory conditions over part of the boundary, we may easily study solutions for a sequence of frequencies to discover resonances. A facility for repeating the solution at a sequence of parameter values is provided by the software.
VIII. EIGENSTATES AND QUANTUM MECHANICS
The stationary vibration of a membrane, fixed at the boundaries, may be described by a
PDE in ( , ) , although the displacement occurs in the z direction. Problems of this kind are particularly simple, since the amplitude remains real. If the displacement is denoted by w , the
PDE for a membrane becomes w
w
0 where
d T ,
the mass density, d the thickness and T the energy of surface tension.
Here we search for solutions compatible with w
0 on the entire boundary. This type of solution can exist only for particular values of
( eigenvalues ). The software provides a special solver for this case, which we activate by the keyword modes in the select segment of the descriptor. Thus, modes =16 means that we ask for 16 distinct modes of oscillation and the corresponding values of the parameter
. In all other respects the descriptor is similar to those we have already seen.
The next figure shows a surface plot of eigenstate number 8 of a circular membrane.
Solutions for more complicated boundary shapes are easily obtained.
15
Wave mechanics leads to eigenvalue problems which are formally similar to those of vibrating membranes. The time-independent Schrödinger equation for one electron reads
2
cV
c
0 where
is the wave function, c
8
2 m e
/ h
2
, V the potential and
the energy eigenvalue.
The next figure shows the probability distribution corresponding to the 8th eigenstate of an electron elastically bound to the origin of the ( , ) plane.
16
In a similar manner we may solve for the eigenstates of axially symmetric systems after separating the PDE with respect to the azimuthal coordinate. Thus it is also possible to treat the hydrogen atom and even the hydrogen molecule ion.
IX. UNDERGRADUATE EDUCATION
It should be clear from the above examples that most fields may be illustrated and studied by easily-managed software. Teachers could perhaps feel tempted to demonstrate various solutions to the students as a complement to lectures. That would, however, be both too much and too little.
It would be too much in the sense that FEA solutions just become part of the mass of passive information communicated by traditional teaching, and the exciting explorative process would be missed.
It would be too little in the sense that typing descriptor files strongly induces the student to think about what each line means and to consider alternatives. Even copying a file line-byline from a book tends to break the passive attitude so common in academic education. As the student goes on to create more files, he will notice that it is convenient to use a previous descriptor as a template, and just modify the few lines that are different. The time spent on typing is thus small, and it is by no means wasted. If you create a descriptor on your own, and
17
run it, you have the feeling that you have actually solved the physical problem at hand. In the beginning, when you only modify a line here and there, this feeling of personal triumph may be exaggerated, but when you later lay down a descriptor on your own, using only the minimum template as a guide, you have in fact done it. The only reservation is that you have not read and understood the 200 000 lines of computer code that the FEA program consists of. You are then acting as a physicist using an expert mathematical program as a tool.
Of course, the principles of FEA software need not forever remain a secret to the student using it. Integrating both sides of a PDE over a number of triangular cells is a natural thing to do, and the way one introduces boundary conditions is worth knowing, at least superficially.
It is also essential to understand that FEA only yields the solution at discrete points (nodes), from which values and derivatives are obtained by interpolation.
A laboratory course on the fields of physics by FEA could proceed as follows. The students, which are assumed to have seen derivations of PDEs, are allotted PCs, either individually or in pairs. They have before them a textbook or a set of instructions giving an outline of the relevant theory and a number of examples to be typed and run, as well as a few related examples requiring the descriptor file be copied and modified. After this introductory phase, they are asked to write descriptors for end-of-chapter exercises, designed to demand more initiative and independence. All of this work should be reported using Word or a similar word processor, including the files, figures and comments. Once the teacher has become familiar with the software and this way of working, he should be able to supply more exercises, since possible variations are virtually unlimited.
Students as well as teachers may have reservations about accepting the result of an FEA calculation as a solution. There are two ways of putting their minds at rest. Firstly, one could include a certain number of examples where an exact solution is available and may be computed easily enough for comparison. After that one could proceed to cases where materials properties vary in space, which would generally be outside the domain of exactly tractable problems. Secondly, it is always possible to plot the left hand side of the PDE, which should vanish for the solution. In addition, it is possible to plot the value and also its normal derivative at the boundary for comparison with the conditions imposed by the problem.
The lasting value of this practical work on the PC is to learn how boundary conditions influence the solution and the related fields. The errors the student may commit when typing the descriptors are also highly educational. The software has been conceived in such a way that a solution is generated on default assumptions, even if the boundary condition should be different from what the user intended, and even if the PDE should be incorrect. Here, the student should be given a chance to pinpoint his mistake by inspecting the fields, before he is put right by an authority. The Maxwell equations for the electromagnetic field, say, remain abstract objects to many students, until they have had occasion to transform them into secondorder PDEs, solve them numerically and then use the fundamental equations again to calculate and plot the fields. Even many teachers are surprised to discover that a solution to a particular problem may be different from what they expected, while on reflection they have to agree that the FEA solver must be right. The policy of learning by doing remains as wise as ever.
The final test after such a course may be designed after the pattern of end-of-chapter problems, which are then to be treated individually by each student. For reference, he may use the minimum template as well as a list describing the syntax. Although there are only a few commands to remember, there is no virtue in having them accurately available in personal memory. Most problems raise questions which could be answered separately on the word processor. The entire result of the examination may be submitted on a diskette.
18
The author has conducted rather general courses of the type described on three occasions, within the program of engineering physics. My colleagues Dr. G. Brodin and Dr. J. Larsson have used the same software package in their courses on vector analysis and electromagnetism. Evaluations indicate that the students enjoy this new type of course, and in particular they appreciate the enhancement in understanding that it brings. Furthermore, they report a better overview of physics after the course.
The main complaint has been the time spent on correcting a mistake, which always requires re-running the problem. The exercises may be chosen such that a run may be completed in a minute on a Pentium system, but trivial errors in choosing plots may still lead to irritating repetitions. In the present state, the software runs problems from beginning to end without user interaction, but future versions under development will permit repeated plotting after the solution has been produced. Thus, the time spent on optimizing plots should soon become negligible.
The principal cost resides in the PC systems themselves, unless these can be used for other purposes as well, which is usually the case. The license cost for the software depends on the ambitions. A package for a maximum of 500 nodes may be obtained for free on the
Internet
2
, and for the simplest problems this level is quite satisfactory. For larger problems or higher accuracy it is necessary to obtain one license per PC, which will cost $500 each, but this expenditure need not be repeated for years. Classroom licenses are also available.
X. CONCLUSIONS AND PERSPECTIVES
The advent of the personal computer has opened avenues that have not yet been widely exploited in academic education. Systematic use of existing software now allows teachers to illustrate the whole of first-year mathematics by explorative exercises
8
. By adopting a practical approach it should be possible to expand, to a substantial degree, the arsenal of mathematical tools used in science and engineering education.
We have attempted to show that FEA calculations are surprisingly simple to carry out, and that they have a sufficiently large range of application in physics to form a viable complement to the curriculum for physics majors and for engineering students. In engineering curricula, the same software may be reused in courses of different kinds, which helps to justify the expense in time, software and hardware.
ACKNOWLEDGEMENT
I wish to thank Dr. Russell Ross, formerly of the University of East Anglia, UK, for reading this paper and for suggesting valuable improvements.
1. G. Backstrom, “PDEase2 Solves Partial Differential Equations Flexibly Using Finite
Element Analysis”, Comput. Phys. 8 , 185-187 (1994).
2. FlexPDE
3. PCGFem
®
®
4. MATLAB
from PDE Solutions, Inc., http://www.pdesolutions.com
from Numerica, Ivry 94203, France.
®
PDE Toolbox from MathWorks, Inc., Natick, MA 01760
5. G. Backstrom, Fields of Physics by Finite Element Analysis, An Introduction ,
(Studentlitteratur, ISBN 91-44-00655-1, 1998
6. G. Backstrom, “Learning About Wave Mechanics by FEA on a PC”, Comput. Phys. 10,
444-447 (1996).
19
7. G. Backstrom, Deformation and Vibration by FEA, (Studentlitteratur, ISBN 91-44-
00849-X, 1998
8. G. Backstrom, Practical Mathematics Using MATLAB
®
, (Studentlitteratur, ISBN 91-44-
00544, 1997)
9. S. P. Timoshenko, J. N. Goodier, Theory of Elasticity (McGraw-Hill, 1970).
20