conjugate gradient method - Department of Computer Science
advertisement

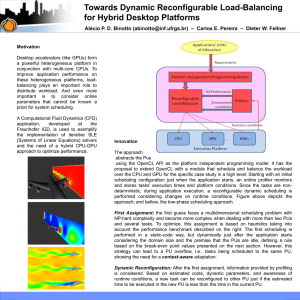
Monica Garika Chandana Guduru METHODS TO SOLVE LINEAR SYSTEMS Direct methods Gaussian elimination method LU method for factorization Simplex method of linear programming Iterative method Jacobi method Gauss-Seidel method Multi-grid method Conjugate gradient method Conjugate Gradient method The CG is an algorithm for the numerical solution of particular system of linear equations Ax=b. Where A is symmetric i.e., A = AT and positive definite i.e., xT * A * x > 0 for all nonzero vectors If A is symmetric and positive definite then the function Q(x) = ½ x`Ax – x`b + c Conjugate gradient method Conjugate gradient method builds up a solution x*€ Rn in at most n steps in the absence of round off errors. Considering round off errors more than n steps may be needed to get a good approximation of exact solution x* For sparse matrices a good approximation of exact solution can be achieved in less than n steps in also with round off errors. Practical Example In oil reservoir simulation, The number of linear equations corresponds to the number of grids of a reservoir The unknown vector x is the oil pressure of reservoir Each element of the vector x is the oil pressure of a specific grid of the reservoir Linear System Square matrix Unknown vector (what we want to find) Known vector Matrix Multiplication Positive Definite Matrix [ x 1 x 2 … xn ] >0 Procedure Finding the initial guess for solution 𝑥0 Generates successive approximations to 𝑥0 Generates residuals Searching directions Conjugate gradient iteration x0 = 0, r0 = b, p0 = r0 for k = 1, 2, 3, . . . αk = (rTk-1rk-1) / (pTk-1Apk-1) step length xk = xk-1 + αk pk-1 approximate solution rk = rk-1 – αk Apk-1 residual βk = (rTk rk) / (rTk-1rk-1) improvement pk = rk + βk pk-1 search direction Iteration of conjugate gradient method is of the form x(t) = x(t-1) + s(t)d(t) where, x(t) is function of old value of vector x s(t) is scalar step size x d(t) is direction vector Before first iteration, values of x(0), d(0) and g(0) must be set Steps to find conjugate gradient method Every iteration t calculates x(t) in four steps : Step 1: Compute the gradient g(t) = Ax(t-1) – b Step 2: Compute direction vector d(t) = - g(t) + [g(t)` g(t) / g(t-1)` g(t-1)] d(t-1) Step 3: Compute step size s(t) = [- d(t)` g(t)]/d(t)’ A d(t)] Step 4: Compute new approximation of x x(t) = x(t-1) + s(t)d(t) Sequential Algorithm 1) 𝑥0 = 0 2) 𝑟0 := 𝑏 − 𝐴𝑥0 3) 𝑝0 := 𝑟0 4) 𝑘 := 0 5) 𝐾𝑚𝑎𝑥 := maximum number of iterations to be done 6) if 𝑘 < 𝑘𝑚𝑎𝑥 then perform 8 to 16 7) if 𝑘 = 𝑘𝑚𝑎𝑥 then exit 8) calculate 𝑣 = 𝐴𝑝k 9) αk : = rkT rk/pTk v 10) 𝑥k+1:= 𝑥k + ak pk 11) 𝑟k+1 := 𝑟k − ak v 12) if 𝑟k+1 is sufficiently small then go to 16 end if 13) 𝛽k :=( r T k+1 r k+1)/(rTk 𝑟k) 14) 𝑝k+1 := 𝑟k+1 +βk pk 15) 𝑘 := 𝑘 + 1 16) 𝑟𝑒𝑠𝑢𝑙𝑡 = 𝑥k+1 Complexity analysis To Identify Data Dependencies To identify eventual communications Requires large number of operations As number of equations increases complexity also increases . Why To Parallelize? Parallelizing conjugate gradient method is a way to increase its performance Saves memory because processors only store the portions of the rows of a matrix A that contain nonzero elements. It executes faster because of dividing a matrix into portions How to parallelize? For example , choose a row-wise block striped decomposition of A and replicate all vectors Multiplication of A and vector may be performed without any communication But all-gather communication is needed to replicate the result vector Overall time complexity of parallel algorithm is Θ(n^2 * w / p + nlogp) Row wise Block Striped Decomposition of a Symmetrically Banded Matrix (a) (b) Dependency Graph in CG Algorithm of a Parallel CG on each Computing Worker (cw) 1) Receive 𝑐𝑤𝑟0,𝑐𝑤 𝐴,𝑐𝑤 𝑥0 2) 𝑐𝑤𝑝0 =𝑐𝑤 𝑟0 3) 𝑘 := 0 4) 𝐾𝑚𝑎𝑥 := maximum number of iterations to be done 5) if 𝑘 < 𝑘𝑚𝑎𝑥 then perform 8 to 16 6) if 𝑘 = 𝑘𝑚𝑎𝑥 then exit 7) 𝑣 =𝑐𝑤 𝐴𝑐𝑤𝑝𝑘 8) 𝑐𝑤𝑁𝛼𝑘 9) 𝑐𝑤𝐷𝛼𝑘 10) Send 𝑁𝛼𝑘,𝐷𝛼𝑘 11) Receive 𝛼𝑘 12) 𝑥𝑘+1 = 𝑥𝑘 + 𝛼𝑘𝑝𝑘 13) Compute Partial Result of 𝑟𝑘+1: 𝑟𝑘+1 =𝑟𝑘 − 𝛼𝑘𝑣 14) Send 𝑥𝑘+1, 𝑟𝑘+1 15) Receive 𝑠𝑖𝑔𝑛𝑎𝑙 16) if 𝑠𝑖𝑔𝑛𝑎𝑙 = 𝑠𝑜𝑙𝑢𝑡𝑖𝑜𝑛𝑟𝑒𝑎𝑐ℎ𝑒𝑑 go to 23 17) 𝑐𝑤𝑁𝛽𝑘 18) 𝑐𝑤𝐷𝛽𝑘 19) Send 𝑐𝑤𝑁𝛽𝑘 , 𝑐𝑤𝐷𝛽𝑘 20) Receive 𝛽𝑘 21) 𝑐𝑤𝑝𝑘+1 =𝑐𝑤 𝑟𝑘+1 + 𝛽𝑘 𝑐𝑤𝑝𝑘 22) 𝑘 := 𝑘 + 1 23) Result reached Speedup of Parallel CG on Grid Versus Sequential CG on Intel Communication and Waiting Time of the Parallel CG on Grid We consider the difference between f at the solution x and any other vector p: i) ii ) f p 1 f x 1 p Ap b p c t t 2 x Ax b x c t t 2 1 t 1 t t t ii i ) f ( x ) f p x A x b x c p A p b p c 2 2 sim plify ) f ( x ) f p 1 1 2 2 replace b ) f ( x ) f p 1 x Ax x Ax x Ax b x t t t t 2 1 1 2 positive-definitess ) f ( x ) f p 0 t 1 t p Ap x Ap t t 2 1 x Ax t 2 p Ap b p p Ap x Ap t 2 x p t A x p t Parallel Computation Design Parallel Computation Design – Iterations of the conjugate gradient method can be executed only in sequence, so the most advisable approach is to parallelize the computations, that are carried out at each iteration The most time-consuming computations are the multiplication of matrix A by the vectors x and d – Additional operations, that have the lower computational complexity order, are different vector processing procedures (inner product, addition and subtraction, multiplying by a scalar). While implementing the parallel conjugate gradient method, it can be used parallel algorithms of matrix-vector multiplication, “Pure” Conjugate Gradient Method (Quadratic Case) 0 - Starting at any x0 define d0 = -g0 = b - Q x0 , where gk is the column vector of gradients of the objective function at point f(xk) 1 - Using dk , calculate the new point xk+1 = xk + ak dk , where gkTd k ak=- T d k Qd k 2 - Calculate the new conjugate gradient direction dk+1 , according to: dk+1 = - gk+1 + bk dk where gk+1 TQd k bk= d kTQd k ADVANTAGES Advantages: 1) Gradient is always nonzero and linearly independent of all previous direction vectors. 2) Simple formula to determine the new direction. Only slightly more complicated than steepest descent. 3) Process makes good progress because it is based on gradients. ADVANTAGES Attractive are the simple formulae for updating the direction vector. Method is slightly more complicated than steepest descent, but converges faster. Conjugate gradient method is an Indirect Solver Used to solve large systems Requires small amount of memory It doesn’t require numerical linear algebra Conclusion Conjugate gradient method is a linear solver tool which is used in a wide range of engineering and sciences applications. However, conjugate gradient has a complexity drawback due to the high number of arithmetic operations involved in matrix vector and vector-vector multiplications. Our implementation reveals that despite the communication cost involved in a parallel CG, a performance improvement compared to a sequential algorithm is still possible. References Parallel and distributed computing systems by Dimitri P. Bertsekas, John N.Tsitsiklis Parallel programming for multicore and cluster systems by Thomas Rauber,Gudula Runger Scientific computing . An introduction with parallel computing by Gene Golub and James M.Ortega Parallel computing in C with Openmp and mpi by Michael J.Quinn Jonathon Richard Shewchuk, ”An Introduction to the Conjugate Gradient Method Without the Agonizing Pain”, School of Computer Science, Carnegie Mellon University, Edition 1 1/4