- Journal of Vascular Surgery
advertisement

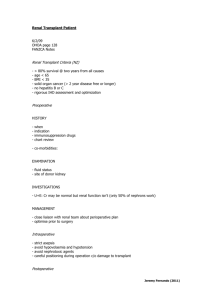
Robot-assisted laparoscopic repair of renal artery aneurysms Pier Cristoforo Giulianotti, MD,a Francesco Maria Bianco, MD,a Pietro Addeo, MD,a Antonella Lombardi, MD,b Andrea Coratti, MD,b and Fabio Sbrana, MD,a Chicago, Ill; and Grosseto, Italy Objective: The aim of this article is to report our experience in the repair of renal artery aneurysms using robot-assisted surgery. Methods: Between December 2002 and March 2009, five women with a mean age of 63.8 years (range, 57-78 years) underwent robot-assisted laparoscopic repair of renal artery aneurysms by the same surgeon at two different institutions, the Department of General Surgery, Misericordia Hospital, Grosseto, Italy (three patients) and the Division of Minimally Invasive and Robotic Surgery at the University of Illinois, Chicago (two patients). The mean size of the lesions was 19.4 mm (range, 9-28 mm). Four of the lesions were complex aneurysms involving the renal artery bifurcation. Two patients were symptomatic and three had hypertension. In situ repair by aneurysmectomy was performed in all cases, followed by revascularization. In complex aneurysms, an autologous saphenous vein graft was used for the reconstruction. Results: The mean operative time was 288 minutes (range, 170-360 min) and the estimated surgical blood loss was 100 ml (range, 50-300 ml). Warm ischemia time was 10 minutes in the patient treated by aneurysmectomy, followed by direct reconstruction. The average warm ischemia time was 38.5 minutes (range, 20-60 min) for patients treated with saphenous vein graft interposition. The mean time to resume a regular diet was 1.6 days (range, 1-2 days). The mean postoperative length of hospital stay was 5.6 days (range, 3-7 days). No postoperative morbidity was noted. The mean follow-up time for the entire series was 28 months (range, 6-48 months). Color Doppler ultrasonography examination showed patency in all reconstructed vessels. One patient had stenosis of one of the reconstructed branches, which was treated with percutaneous angioplasty. Conclusions: Robot-assisted laparoscopic repair of renal artery aneurysms is feasible, safe and effective. The technical advantages of the robotic system allows for microvascular reconstruction to be performed using a minimally invasive approach, even in complex cases. This approach may also allow for improved postoperative recovery and reduce the morbidity correlated with open repair of renal artery aneurysms. Although more experience and technical refinements are necessary, robot-assisted laparoscopic repair of renal artery aneurysms represents a valid alternative to open surgery. ( J Vasc Surg 2010;51:842-9.) Renal artery aneurysms (RAA) are a rare occurrence with a reported incidence by angiographic studies varying from 0.6% to 1.0%. Most of these lesions are asymptomatic and are detected in patients during radiologic studies for hypertension.1,2 Indications for treatment are based on several factors including operative risk, presence of local symptoms, hypertension, and anticipated pregnancy in women; as well as anatomical features of the RAA such as size.3,4 Treatment for RAA involves endovascular techniques and surgical repair, depending on the location of aneurysm along the renal artery. For complex RAA located at renal artery bifurcation, and for those involving distal From the Division of General, Minimally Invasive, and Robotic Surgery, Department of Surgery, University of Illinois at Chicago,a and the Department of General Surgery, Misericordia Hospital, Grosseto.b Competition of interest: none. Reprint requests: Pier Cristoforo Giulianotti, MD, Division of General, Minimally Invasive, and Robotic Surgery, University of Illinois at Chicago, 840 S. Wood St., Ste. 435 E, Chicago, Illinois 60612 (e-mail: piercg@uic.edu). The editors and reviewers of this article have no relevant financial relationships to disclose per the JVS policy that requires reviewers to decline review of any manuscript for which they may have a competition of interest. 0741-5214/$36.00 Published by Elsevier Inc. on behalf of the Society for Vascular Surgery. doi:10.1016/j.jvs.2009.10.104 842 branches, open surgical repair by in situ or ex vivo repair, respectively, represents the gold standard of treatment.5-7 In an effort to reduce the invasiveness and morbidity associated with open surgical RAA repair, the laparoscopic approach has been proposed as a possible alternative. However, the latter technique has not gained widespread acceptance due to the technical limitations of laparoscopy. For this reason, only a few cases have been reported in the literature.8,9 Over the last 10 years, the use of a robotic system has significantly augmented the surgeon’s dexterity in performing complex minimally invasive procedures. The application of the robot in the field of vascular surgery has largely been reported for aortic and cardiac surgery,10,11 yet remains poorly applied for RAA repair.12 In this article, we describe our experience using robot-assisted surgery for laparoscopic repair of five RAA. METHODS Between December 2002 and March 2009, five patients with RAA underwent robot-assisted laparoscopic repair by the same surgeon (PCG) at two hospitals. Three of the five were performed at the Department of General Surgery, Misericordia Hospital in Grosseto, Italy (from December 2002 to April 2007), and the other two were performed at the Division of Minimally Invasive and Ro- JOURNAL OF VASCULAR SURGERY Volume 51, Number 4 Giulianotti et al 843 Table I. Demographic data and aneurysm characteristics Patient Associate conditions/risk factors Aneurysms (dimension-side) Renal pain Nephrolithiasys, hypertension 18 mm-Rt III Renal pain Hypertension 20 mm-Lt F/57 F/59 II II Solitary kidney — 28 mm-Lt 09 mm-Rt F/66 II Incidental Incidental (candidate for LKD) Incidental (lower right back pain) First posterior right arterial branch Main trunk of renal artery First order bifurcation First order bifurcation Hypertension, diabetes, Hypercholesterolemia, degenerative joint disease 22 mm-Lt First order bifurcation Gender/age ASA 1 F/78 II 2 F/59 3 4 5 Symptoms Location along the course of the renal artery ASA, American Society of Anesthesiology Classification; LKD, living kidney donation; Lt, left; Rt, right. botic Surgery of the University of Illinois, Chicago (from April 2007 to March 2009). Patients who presented with RAA at the two centers during the study period were routinely considered for the minimally invasive robotic approach. Presence of associated abdominal aortic aneurysms, ruptured lesions, or specific contraindication to laparoscopy (American Society of Anesthesiologists [ASA] status IV, cardiac or respiratory insufficiency) were considered as exclusion criteria to robotic repair. Presence of solitary kidney or previous abdominal surgery was not considered part of the exclusion criteria. Medical records of the five patients were retrospectively reviewed for patient demographics, preoperative symptoms, location and size of the lesions, operating time, morbidity, duration of hospital stay, and follow up. Table I lists the demographic and baseline variables, as well as aneurysm characteristics. All patients were female, with a mean age of 63.8 years (range, 57-78 years). Two patients with RAA were symptomatic for flank pain. One was affected by nephrolithiasis, and, upon investigation for sudden onset of flank pain, a right renal aneurysm was discovered. The patient was hospitalized and an abdominal computed tomography (CT) scan revealed a single right renal stone as well as a right renal aneurysm. During her hospital stay, the patient spontaneously passed the kidney stone following medical therapy and underwent surgery two weeks later. Lesions were incidentally discovered in the other patients during radiologic investigation for coexisting disorders (solitary kidney since birth and back pain due to degenerative joint disease) or during a preoperative work-up for possible living kidney donation. Three patients had preoperative diagnosis of hypertension. Hypertension was defined as systolic blood pressure ⱖ140 mm Hg, diastolic pressure ⱖ90 mm Hg, or the use of antihypertensive medications. Blood pressure response after interventions was estimated using the American Heart Association guidelines.13 Three aneurysms affected the left renal artery and two affected the right one. One aneurysm was located along the main renal artery trunk and four were complex aneurysms located at the main artery bifurcation or beyond. (Fig 1) At the preoperative radiologic work-up, the mean size of the aneurysms was 19.4 mm (range, 9-28 mm).We elected to repair RAA in three patients because of aneurysm size and hypertension. The fourth repair was performed due to the presence of solitary kidney, and the fifth to kidney donation. According to the American Society of Anesthesiology classification, the status of four patients was ASA II and ASA III in one patient. Patency of repair was evaluated during follow up using color Doppler ultrasonography (US). One patient had an MRI one year after the repair (Fig 2) and another had an abdominal CT scan six months following the repair. Blood pressure status, dosage of hypertension medications, and status of renal function were also evaluated. Surgical technique. In all cases, robot-assisted laparoscopic RAA repair was performed using the da Vinci Surgical System (Intuitive Surgical Inc, Sunnyvale, Calif). Technical details regarding the use of these robotic systems have previously been reported.14 Patients were placed in a 30degree left (or right) semidecubitus position, according to the lesion side. A Verres needle was inserted in the left hypocondrium to insufflate the abdomen to 14 mm Hg. The initial 12-mm trocar was placed in the right (or left) pararectal line, at the supraumbilical side, for the 30-degree telescope. Two 8-mm robotic ports (for the operative robotic arms) were placed in the right (or left) iliac region and epigastrium, respectively. An 8-mm port (fourth arm) was then introduced in the right (or left) flank and a 12-mm port served as an assistant instrument in the mesogastrium. The robotic cart was placed behind the patient’s left shoulder and docked to the robotic ports (Fig 3). For the right RAA, the procedure was initiated using a robotic monopolar hook and an ultrasound dissector, with mobilization of the right colonic flexure. After incising the posterior peritoneum overlying the lateral aspect of the duodenum, the duodenal loop and the pancreatic head were mobilized and gradually retracted medially until the right renal hilum was exposed. For the left RAA, the left colonic flexure was mobilized by incising the splenocolic ligament and detaching the insertion of the mesocolon at the inferior border of the pancreas. The posterior aspect of the left pancreas was dissected free by its posterior attachments and reflected medially by the fourth robotic arm JOURNAL OF VASCULAR SURGERY April 2010 844 Giulianotti et al Fig 1. Schematic drawing of RAA aneurysms location and type of repair performed. (A) Patient 1; (B) Patient 2; (C) Patient 3, 5: (D) Patient 4. until the renal hilum was exposed. The renal vein was dissected and looped for vascular control. The proximal renal artery was then completely isolated and surrounded with tape. The aneurysms were accurately and cautiously isolated, taking care to recognize all branches directed from the aneurysm to the renal parenchyma. The dissection was carried out until complete control of the distal branches was achieved. After stopping the pneumoperitoneum in anticipation of the vein graft for vascular reconstruction, an 8-10 cm saphenous vein graft was procured from the right groin. This was fashioned using an ex-vivo bench technique so as to make a Y-shaped graft using a running suture of Prolene 6/0 to anastomose one sidearm to the main graft and then introduce it using Endo Catch (Covidien AG, Mansfield, Mass) through the 12-mm assistant’s port. After administration of mannitol, furosemide, and systematic heparin, laparoscopic clamps (Aesculap, Center Valley, Pa) were placed proximally on the main renal artery and distally (main renal artery and first-order or second order branches, respectively), and aneurysmectomy was performed. Reconstruction was achieved in one case by an end-to-end anastomosis between the two edges of the main renal artery using a single running polytetrafluoroethylene (PTFE) suture (CV-6 GORE-TEX; W.L. Gore & Associates, Flagstaff, Ariz). In the four remaining cases, the reconstruction was achieved by the interposition of the saphenous Y graft using continuous PTFE sutures (CV-6/CV-7, TTc-9 needles GORE-TEX) (Fig 4). In order to minimize the warm ischemia time, the kidneys were partially reperfused, once anastomosis be- tween the main renal artery and one peripheral branch was completed, and while the third anastomosis was being performed. In one patient (Patient 4; Table II) with three separate first-order renal branches originating from the aneurysm, two branches were tailored and sutured together to create one common orifice. It was then anastomosed to one saphenous branch. Aneurysm specimens were retrieved using an Endo Catch through the assistant’s port. Color Doppler ultrasound (US) was used intraoperatively to assess the correct quality of reperfusion. RESULTS The operative data are summarized in Table II including type of reconstruction, use of the fourth robotic arm, operative time, warm ischemia time, estimated blood loss, and length of hospital stay. The overall mean operative time (defined as the time from initial skin incision to the final skin stitch) was 288 minutes (range, 170-360 min) and the estimated blood loss was 100 ml (range, 50-300 ml). The warm ischemia time was 10 minutes for the patient requiring an end-to-end reconstruction while the mean warm ischemia time was 38.5 min (range, 20-60 min) for the patients who underwent reconstruction with interposition of a Y saphenous vein graft. The mean time to resume a regular diet was 1.6 days (range, 1-2 days). The mean postoperative stay was 5.6 days (range, 3-7 days). Postoperative serum creatinine levels were normal in all patients but one (Patient 4; Table II). In this patient, the postoperative serum creatinine level returned to normal range by postoperative day three. Symptoms resolved postoperatively in the symptomatic patients and postoperative JOURNAL OF VASCULAR SURGERY Volume 51, Number 4 Fig 2. Magnetic resonance imaging (MRI) before (A) and after the repair of right renal artery aneurysms (B). recovery was uneventful in all patients. At mean follow up of 28 months (range, 6-48 months), four patients had normal renal function and showed patency of the reconstructed vessels on the color Doppler examination. One patient had a stenosis of one of the reconstructed branches six months after the repair (Patient 5). This was associated with a raised serum creatinine level from 0.9 mg/dL to 1.2 mg/dL). The stenosis was treated with percutaneous angioplasty. There was no change in the status of hypertension that was recorded. All three patients who had a preoperative diagnosis of hypertension remained at the same preoperative dosage of medications. DISCUSSION In recent years, the diagnosis of RAA has increased, mainly due to the rising number of radiologic studies carried out for the study of systemic hypertension. Complications of RAA involve spontaneous rupture, distal embolization, renal infarction, renovascular hypertension, and arteriovenous fistula. When indicated, possible treatments for RAA include endovascular therapies such as selective Giulianotti et al 845 coil embolization or stenting, and open surgical repair. At dedicated centers, open surgical RAA repair has shown good long-term clinical outcomes and symptomatic remission in most patients. In spite of a limited mortality, however, open RAA repair has also been associated with significant morbidity in the context of major intrabdominal surgery.5,15 Among endovascular techniques, stents represent a possible alternative to surgical repair for RAA because they allow for organ flow preservation with minimal surgical trauma and warm ischemia time. Nevertheless, the current use of stents is restricted to RAA involving the main renal artery trunk, with edges located at least 15 mm away from the renal bifurcation and renal ostium.16,17 As a result, complex RAA that involve renal artery bifurcation, or that present a wide neck, are not suitable for endovascular repair because of the associated risks of branch occlusion and renal infarction. Furthermore, data are still lacking regarding the long-term patency of this treatment and its superiority as compared with surgical bypass. A midline incision is generally used for in situ repair to allow complete exposure of the aorta, renal arteries, and kidneys. In ex vivo repair, the kidney may be reimplanted in orthotopic position or heterotopic position. In the latter position, some authors use an extended retroperitoneal approach from the flank (for procuring the kidney) to the pelvis (for autotransplantation).18 Minimally invasive laparoscopic surgery has been applied recently to the field of vascular surgery to reduce the operative trauma, diminish postoperative pain complications and hospitalization, and minimize incision-related morbidity.19 For RAA repair, Gill et al in 2001 performed a complete laparoscopic repair of RAA located at the renal artery bifurcation.8 This procedure consisted of bivalving the renal aneurysms, partially excising the excess aneurysm sac, and carefully trimming for adjustment to the diameter of the renal artery. Reconstruction was achieved by suturing the anterior wall using continuous running of nonabsorbable sutures. The same technique was later reported by other authors.9 More recently, repair of RAA involving secondary and tertiary renal artery branches using a minimally invasive approach has been reported by different authors, thus establishing the feasibility of this procedure and short term outcomes.20,21 This procedure involves laparoscopic nephrectomy with ex vivo repair and heterotopic autotrasplantation. The shortcoming of laparoscopy for RAA repair might be related to the technical limitations of this technique. In situ repair of complex RAA requires fine dissection in a deep narrow field, as well as precision and time effective microvascular anastomoses on small caliber vessels. In open surgery, this would be achieved with the use of magnification and dedicated microsurgical instruments.3 Traditional laparoscopic instruments are not suited for microsurgery, however, because of their length and fulcrum effect. The natural tremor of the surgeon’s hand is amplified by the length of instruments, which makes micro-reconstruction difficult, or even impossible.22 The loss of hand-eye 846 Giulianotti et al JOURNAL OF VASCULAR SURGERY April 2010 Fig 3. Operative room set-up and positioning of ports for left renal artery aneurysms repair. 1: 12-mm trocar for endoscope; 2: 8-mm trocar for right robotic arm; 3: 8-mm trocar for left robotic arm; 4: 8mm trocar for the fourth robotic arm; 5: 12mm trocar for assistant instruments. coordination and the counterintuitive movement of endoscopic instruments represent additional difficulties. The visual system available in laparoscopy, which consists of an endoscopic camera, offers two dimensions of view with loss of depth perception and unsteadiness. Furthermore, during long operations, the unnatural position assumed by the surgeon can increase fatigue. Robotic surgery addresses most of the technical limitations of laparoscopic surgery. The use of the da Vinci system allows for a more ergonomic approach and recreates the hand-eye coordination that is lost during laparoscopic surgery. It also provides improved ergonomics for the operating surgeon, who is now seated at a surgical console. The system provides three-dimensional vision which offers excellent resolution, depth perception, and magnification. The visual component is steady and under the direct control of the operating surgeon. The availability of a motion scaling system allows for fine movements and tremor filtering eliminates problem associated with natural tremor. The seven degrees of freedom afforded by the articulating in- struments with EndoWrist technology reproduce the exact movements of the surgeon’s hand, wrist, and fingers. This allows for precise suturing in all directions. The advantages of the robot over standard laparoscopy for vascular anastomoses have been reported in experimental studies on aortic and coronary anastomoses. 23,24 In clinical settings, robotic technology has a short learning curve with regard to the creation of aortic anastomosis as compared to conventional laparoscopic surgery.25 We started to use the robotic da Vinci Surgical System in October 2000, when it first became available at our institution. Since that time, its application has been extended from general to thoracic and vascular surgical procedures. We performed the first RAA robot-assisted repair in December 2002.14,26 The robotic system makes it possible to perform microvascular anastomosis using a minimally invasive approach. The fourth robotic arm on the system is under the direct control of the surgeon and allows constant and stable retraction of the neighboring organs, providing optimal exposure of the operative field. As a general rule, the total JOURNAL OF VASCULAR SURGERY Volume 51, Number 4 Giulianotti et al 847 Fig 4. Endoscopic view of a robot-assisted laparoscopic left renal artery aneurysm repair. (A) Isolation of the aneurysm; (B) Aneurysmectomy; (C) Anastomosis between the main renal artery trunk and the saphenous vein graft; (D) Intraoperative view after completing the first two anastomoses; and (E) at the end of the vascular reconstruction. An, Aneurysm; e, End-to-end anastomoses; f, First order renal artery branches; m, Main left renal artery trunk; s, Second order renal artery branches; vg, Venous graft. Table II. Type of renal artery reconstruction and operative data Patient Type of renal artery reconstruction 1 Aneurysmectomy ⫹ Y saphenous vein graft Aneurysmectomy and E-E anastomosis Aneurysmectomy ⫹ Y saphenous vein graft Aneurysmectomy ⫹ Y saphenous vein graft Aneurysmectomy ⫹Y saphenous vein graft 2 3 4 5 Operative time (min) WIT Preoperative creatinine (mg/dL) Postoperative (day one) creatinine (mg/dL) EBL Fourth arm Time to regular diet 310 25 0.9 0.8 50 Y 2 170 10 1.1 0.9 300 N 1 300 20 1.0 0.9 50 Y 2 360 60 0.9 1.4 50 Y 2 300 49 0.8 0.9 50 Y 1 E-E, End to end; EBL, estimated blood loss; LOS, length of stay; WIT, warm ischemia time. absence of tactile feedback using the robotic system has led us to use PTFE sutures for the reconstruction because they are less prone to breakage with manipulation as compared with the polypropylene sutures. This has also been described by others for aortic reconstruction.27 The robotic system facilitates a safe and time efficient reconstruction in the case of RAA involving the main renal trunk, and limits the total time of warm ischemia to 10 minutes. For complex aneurysms, we adopted an in situ repair using a saphenous vein graft interposition. It is important to note, however, that there are both advantages and drawbacks of this technique. Complete resection of the renal artery aneurysm, followed by an autologous graft interposition, allows for the excision of all diseased arterial JOURNAL OF VASCULAR SURGERY April 2010 848 Giulianotti et al segments.28,29 As shown in the description of the technique, and in contrast to the open in situ repair with autologus saphenous graft, the dissection is limited only to the renal hilum vessels, thus preserving the perirenal collateral circulation and ensuring a limited residual renal perfusion during the clamping period.30 Additionally, the use of a branched saphenous graft makes it possible to partially reperfuse the kidney after the first two anastomoses, thereby limiting the total clamping period and warm ischemia time. In our experience, this type of repair results in a mean warm ischemia times of 38 minutes. This long period of time is not, however, significantly more than those reported by other authors for laparoscopic RAA repair which is limited to aneurysm tailoring alone.8,9 Murray et al, in a series of 15 cases of open in situ repair of RAA, reported a mean renal ischemia time of 45.4 minutes.31 The technique used by these authors, however, was the aorto-renal bypass with a branched saphenous vein graft. This technique has the main advantage of limiting the ischemia time to only a portion of the kidney for the time required to complete a single end-to-end anastomosis. Compared with this technique, ours has the drawback of needing a total warm ischemia time. Furthermore, two of our four complex RAA cases required additional time due to the need to reconstruct three distal branches in one patient and the difficulty in reconstructing a posterior branch in another patient. Seki et al reported three cases of RAA repair by in situ technique with a median ischemia time of 70 minutes. This is not comparable, however, because of the different techniques of reconstruction required and the systematic use of cold surface cooling.18 In general, the use of renal cold perfusion is recommended when warm ischemia times are expected to exceed 30 minutes. Crutchley et al reported a series of 29 in situ branch renal artery repairs with a mean cold ischemia time of 125 ⫾ 40 minutes and a mean operative time of 7.75 hours.32 We did not use a cold renal perfusion because we expected the ischemia time to be less than 30 minutes. Unfortunately, this was not the case in two of our cases where a longer ischemia time occurred. Some reports have suggested that longer times (⬍1 hour) can be tolerated without clinical consequences33 and this was our experience in this small series as well. Renal cooling using an angiographic catheter in the renal artery or ice slush in a laparoscopic bag has been reported for laparoscopic partial nephrectomies.34,35 However, these approaches can be quite cumbersome and not feasible for the vascular reconstruction of distal branches. Further development of this technique should be carried out in this direction. In our series, the mean postoperative stay was 5.7 days. This length of stay is difficult to compare with historic series of open RAA repair, as is the mean blood loss, because there is a lack of data with regard to these parameters in most major series reported.5,15,32 However, our length of stay does appear shorter than for those reported in a series of open surgery repairs for renovascular disease.36 Addition- ally, no incision-related morbidity has been observed in our experience. Of the five patients treated, three had hypertension. The association of hypertension with RAA has been well described in the literature.2,5 Apart from the association of RAA to renal artery stenosis, possible explanations include segmental ischemia due to microembolization from intraaneurysm thrombus, kinking of the distal renal artery, or other flow-related phenomenon. In this series, we elected to repair the aneurysms due to the size and associated presence of hypertension, and its role on the related risk of rupture. The rate of cure of hypertension following RAA repair has been reported and varies from 50% to 100%.3 In our experience, hypertension was still present following surgery and we can assume it will remain, based on similar reports.37 However, because it is only three cases, it is difficult to say with certainty. Our experience has several limitations that deserve comment. First, robotic systems are expensive and, while we did not perform a cost-analysis for this small group of patients, we can assume that this kind of repair is more expensive than open repair. However, with increased use and wider application of the system, these costs can be reduced. Furthermore, as the technique is increasingly applied, its benefits in terms of reduced incision-related morbidity and early recovery on a larger basis do have the potential to reduce costs even more. At the same time, if the postoperative results in patients with prolonged warm ischemia time are good, the ability to use a cold perfusion when needed does represent a technical challenge that should be addressed and improved upon in order to allow for a wider application of this technique. Finally, due to the complexity required, this technique should be performed in centers with extensive experience in robotic surgery and renal artery aneurysm repair. CONCLUSIONS We report five cases of RAA in which in situ repair with renal revascularization has been performed with robotassisted surgery. The technical advantages of the robotic system make it feasible to perform microvascular reconstruction in cases of complex RAA using a minimally invasive approach. This approach can reduce the morbidity that is associated with open surgery for repair of RAA and can improve the postoperative recovery. Although more experience and technical refinements are necessary, the robotassisted laparoscopic approach represents a valid alternative to open surgery for RAA. The authors would like to thank Ms Karen Dutro and Mr Sanchit Bathia for the editing of this article and for the illustrations of this article. AUTHOR CONTRIBUTIONS Conception and design: PG, AP Analysis and interpretation: AP, AL, FS Data collection: FB, AC, AL Writing the article: AP, PG JOURNAL OF VASCULAR SURGERY Volume 51, Number 4 Critical revision of the article: FB, AL, AC, FS Final approval of the article: PG, FB, PA, AL, AC, FS Statistical analysis: PA, AL Obtained funding: NA Overall responsibility: PG REFERENCES 1. Henriksson C, Bjorkerud S, Nilson AE, Pettersson S. Natural history of renal artery aneurysm elucidated by repeated angiography and pathoanatomic studies. Eur Urol 1985;11:244-8. 2. Tham G, Ekelund L, Herrlin K, Lindstedt EL, Olin T, Bergentz SE. Renal artery aneurysms. Natural history and prognosis. Ann Surg 1983; 197:348-52. 3. Henke PK, Stanley JC. Renal artery aneurysms:diagnosis, management and outcomes. Minerva Chir 2003;58:305-11. 4. Cohen JR, Shamash FS. Ruptured renal artery aneurysms during pregnancy. J Vasc Surg 1987;6:51-9. 5. Henke PK, Cardneau JD, Welling TH III, Upchurch GR Jr, Wakefield TW, Jacobs LA, et al. Renal artery aneurysms:a 35-year clinical experience with 252 aneurysms in 168 patients. Ann Surg 2001;234:454-63. 6. Lacombe M. Ex situ repair of complex renal artery aneurysms. Cardiovasc Surg 1994;2:767-71. 7. Dubernard JM, Martin X, Gelet A, Mongin D. Aneurysms of the renal artery:surgical management with special reference to extracorporeal surgery and autotrasplantation. Eur Urol 1985;11:26-30. 8. Gill IS, Murphy DP, Hsu TH, Fergany A, El Fettouh H, Meraney AM. Laparoscopic repair of renal artery aneurysm. J Urol 2001;166:202-5. 9. Castillo OA, Vitagliano GJ, Sanchez-Salas R, Chamorro H, Fava M, Diaz MA. Laparoscopic repair of renal artery aneurysm:a description of the technique and results in 2 cases. Surg Laparosc Endosc Percutan Tech 2008;18:379-83. 10. Stadler P, Dvoracek L, Vitasek P, Matous P. Is robotic surgery appropriate for vascular procedures? Report of 100 aortoiliac cases. Eur J Vasc Endovasc Surg 2008;36;401-4. 11. Citwood WR Jr, Rodriguez E, Chu MV, Hassan A, Ferguson TB, Vos PW, Nifong LW. Robotic mitral valve repairs in 300 patients: a single center experience. J Thorac Cadiovasc Surg 2008;136;436-41. 12. Luke P, Knudsen BE, Nguan CY, Pautler SE, Swinnimer S, Kiaii R, et al. Robot-assisted laparoscopic renal artery aneurysm reconstruction. J Vasc Surg 2006;44:651-3. 13. Rundback JH, Sacks D, Kent KC, Cooper C, Jones D, Murphy T, et al. Guidelines for reporting of renal artery revascularization in clinical trial Circulation 2002;106:1572-85. 14. Giulianotti PC, Coratti A, Angelini M, Sbrana F, Cecconi S, Balestracci T, et al. Robotics in general surgery: personal experience in a large community hospital. Arch Surg 2003;138:777-84. 15. Pfeiffer T, Reiher L, Grabitz K, Grünhage B, Häfele S, Voiculescu A, et al. Reconstruction for renal artery aneurysm:operative techniques and long-term results. J Vasc Surg 2003;37:293-300. 16. Abath C, Andrade G, Cavalcanti D, Brito N, Marques R. Complex renal artery aneurysms:liquids or coils? Tech Vasc Interv Radiol 2007;10: 299-307. 17. Lederman RJ, Mendelsohn FO, Santos R, Philips HR, Stack RS, Crowley JJ. Primary renal artery stenting:characteristics and outcomes after 363 procedures. Am Heart J 2001;142:314-23. 18. Seky T, Koyanagi T, Togashi M, Chikaraishi T, Tanda K, Kanagawa K. Experience with revascularizing renal artery aneurysms: is it feasible, safe and worth attempting? J Urol 1997;158:357-62. Giulianotti et al 849 19. Nio D, Diks J, Bemelman WA, Wisselink W, Legemate DA. Laparoscopic vascular surgery: a systematic review. Eur J Vasc Endovasc Surg 2007;33:263-71. 20. Unno N, Yamamoto N, Inuzucka K, Sagara D, Suzucki M, Konno H, et al. Laparoscopic nephrectomy, ex vivo repair, and autotransplantation for a renal artery aneurysm. Report of a case. Surg Today 2007;37: 169-72. 21. Gallagher KA, Phelan MW, Stern T, Bartlett ST. Repair of complex renal artery aneurysms by laparoscopic nephrectomy with ex-vivo repair and autotransplantation. J Vasc Surg 2008;48:1408-13. 22. Prasad SM, Ducko CT, Stephenson ER, Chambers CE, Damiano RJ Jr. Prospective clinical trial of robotically assisted endoscopic coronary grafting with 1 year follow-up. Ann Surg 2001;233:725-32. 23. Ruurda JP, Wisselink W, Cuesta MA, Verhagen HJ, Broeders IA. Robot assisted versus standard videoendoscopic aortic replacement. A comparative study in pigs. Eur J Vasc Endovasc Surg 2004;27:501-6. 24. Boyd WD, Desai ND, Kiaii B, Rayman R, Menkis AH, McKenzie FN, Novick RJ. A comparison of Robot-assisted versus manually constructed endoscopic coronary anastomosis. Ann Thorac Surg 2000;70: 839-43. 25. Diks J, Nio D, Jongkind V, Cuestra MA, Ravuerda JA, Wisselink W. Robot assisted laparoscopic surgery of the infrarenal aorta The early learning curve. Surg Endosc 2007;21:1760-3. 26. Giulianotti PC, Sbrana F, Angelini M, Coratti A. Robotic repair and micro reconstruction of a renal artery aneurysm: advances in technology. In American College of Surgeon’s Video Library. Available at http://cine-med.com. 27. Stadler P, Matous P, Vitasek P, Spacek M. Robot-assisted aortoiliac reconstruction:a review of 30 cases. J Vasc Surg 2006;44:915-9. 28. Ortenberg J, Novick AC, Straffon RA, Stewart BH. Surgical treatment of renal artery aneurysms. Br J Urol 1983;55;341-5. 29. Streeem AB, Novick AC. Aortorenal bypass with a branched saphenous graft for in situ repair of multiple segmental renal arteries. Surg Gynecol Obstet 1982;155:855-9. 30. Abrams HL. The collateral circulation:Response to ischemia. AJR 1983;140:1051-63. 31. Murray SP, Kent KC, Salvatierra O, Stoney RJ. Complex branch renovascular disease:Managments options and late results. J Vasc Surg 1994;20:338-45. 32. Crutchley TA, Pearce JD, Craven TE, Edwards MS, Dean RH, Hansen KJ. Branch renal artery repair with cold perfusion protection. J Vasc Surg 2007;46:405-12; discussion 412. 33. Bhayani SB, Rha KH, Pinto PA, Ong AM, Allaf ME, Trock BJ, et al. Laparoscopic partial nephrectomy:effect of warm ischemia on serum creatinine. J Urol 2004;172:1264-6. 34. Janetschek G, Abdelmaksoud A, Bagheri F, Al-Zahrani H, Leeb K, Gschwendtner M. Laparoscopic partial nephrectomy in cold ischemia: renal artery perfusion. J Urol 2004;171:68-71. 35. Gill IS, Abreu SC, Desai MM, Steinberg AP, Ramani AP, Neg C, et al. Laparoscopic ice slush renal hypothermia for partial nephrectomy:the initial experience. J Urol 2003;170:52-6. 36. Piercy KT, Hundley JC, Stafford JM, Craven TE, Shashi KN, Dean RH, Hansen KJ. Renovascular disease in children and adolescents. J Vasc Surg 2005;41:973-82. 37. Lacombe M. Aneurysms of the renal artery. Personal experience in 101 cases. Chirurgie 1989;115:28-34. Submitted Jul 28, 2009; accepted Oct 8, 2009.