Flight Test Report #1
advertisement

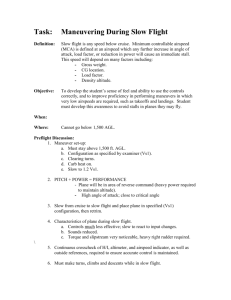
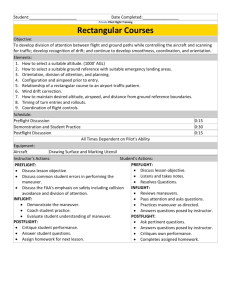
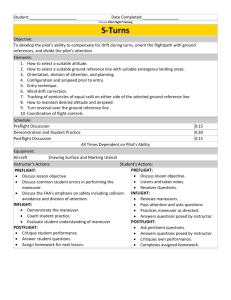
Flight Test Report #1 The Pennsylvania State University Course: AERSP 420 Flight Testing Professor: Dr. Michael Yukish Aircraft: Piper Warrior III (N264ND) Aircraft Owner: Jason Condon (Tech Aviation Flight School) Pilot: Troy Graham Test Date: Sunday September 20, 2015 Test Time: 9:00 am to 10:10 am Location: University Park Airport, State College, PA (KUNV) Team #1: Amelia Batcha, Ryan Burke, Cory Caldwell 2 TABLE OF CONTENTS Don’t forget last person update these Introduction ................................................................................................................... 3 Take-Off Test ................................................................................................................. 5 Theory .......................................................................................................................... 5 Experimental Procedure............................................................................................... 7 Data ............................................................................................................................. 8 Analysis...................................................................................................................... 11 Pitot-Static Calibration................................................................................................ 11 Theory ........................................................................................................................ 11 Experimental Procedure............................................................................................. 12 Data ........................................................................................................................... 12 Analysis...................................................................................................................... 14 Level Flight Power Required ...................................................................................... 16 Theory ........................................................................................................................ 16 Experimental Procedure............................................................................................. 18 Data ........................................................................................................................... 19 Analysis...................................................................................................................... 20 Conclusion ................................................................................................................... 21 Appendix ...................................................................................................................... 22 3 INTRODUCTION Flight test 1 consisted of crew members Amelia Batcha, Ryan Burke, Cory Caldwell and pilot Troy Graham. The purpose of the test was to collect and analyze data at different phases of the mission in order to calculate and predict properties of the airplane. Specifically, there was a Take-Off test, Pitot-Static Calibration, and a Level Flight Power Required analysis. The airplane used for these specific tests was a Piper Warrior III (N264ND) owned by Jason Condon. It consists of one 160 HP Lycoming engine that has four cylinders, is direct drive, and horizontally opposed. At its nose, there is one Sensenich propeller with 2 blades. The Warrior III has a wing area of 170 ft, span of 35 ft, and is 23 ft and 9.6 in from nose to tail. A three-view sketch is shown in Figure 1 below. Figure 1. Three-View Model of the Warrior III 4 The Warrior III can hold a maximum of 4 passengers with a max take-off weight of 2440 lbs. It is a fixed gear monoplane with low semi-tapered wings and an all metal exterior. The wings specifically incorporate a laminar flow by using the NACA-652415 airfoil section. They are cantilevered and attached to a spar box carry-through. The wings contain one fuel tank each, and are mechanically controlled by a lever in the cockpit in between the pilot and co-pilot seats. A cable system is used to activate the control surfaces, for example extending the flaps or using the trim tabs. The empennage consists of a vertical stabilizer, multi-rotational horizontal stabilizer, and a rudder. The tail also includes an anti-servo tab that is meant to improve longitudinal stability and trim. The engine controls are comprised of a throttle control where the engine RPM can be adjusted, and also a mixture control lever which controls the air to fuel ratio. The control panel is shown in Figure 2 below. For the experiments, the gauges used in the control panel are labeled in red circles. Starting from top left to right is the Airspeed Indicator, Altimeter, fuel quantity, and tachometer (RPM). The on-board GPS and Track is displayed on the two screens on the right side of Figure 2. During all three tests, data was analyzed and documented via video recording of these gages. Regarding the performance of the Warrior III, the absolute maximum Indicated Air Speed is 160 knots. However, nominal operating range is in between 50 and 126 knots. Overall, the Warrior III was used to construct the Take-off Test, Pitot-Static Calibration, and Level Flight Power Required analysis which provided data in order to calculate true airspeed, calibrated airspeed, thrust, brake horsepower, flat plate area, and span efficiency. 5 Figure 2. Warrior III Control Panel TAKE-OFF TEST Theory: During the Take-Off Test, the primary forces acting on the airplane were thrust (𝑇), parasite drag (𝐷𝑝), induced drag (𝐷𝑖), rolling friction (𝐷𝑟), and the force slope (𝑊𝑠𝑖𝑛(𝜃)) where 𝜃 was the slope angle of the runway and 𝑊 was the total weight of the aircraft. These equations are represented in (1), (2), (3), and (4) below. A MATLAB code was constructed in order to solve for the takeoff velocity, distance traveled, and lift forces during the takeoff portion of the mission. The inputs of the program include Pressure Altitude (PA), Outside Air Temperature (OAT), True Airspeed (TAS), 6 Revolutions per Minute (RPM), and the runway slope (𝜃). An iteration method was used where velocity, time, and distance was incremented each time step until the iterated velocity reached the take-off velocity. This allows the program to iterate through the whole duration of the take-off. The sum of the forces was used to calculate the acceleration as seen in equations 5 and 6 below. The values assumed in order to calculate the takeoff values are displayed in Table 1. 1 𝑇 = 𝜌𝑛2 𝐷4 𝐶𝑇 2 1 𝐷𝑝 = 𝜌𝑉 2 𝑆𝐶𝑓 2 1 2 𝜌𝑉 𝑆𝑤𝑖𝑛𝑔 𝐶𝐿2 2 𝐷𝑖 = 𝜋𝐴𝑅𝑒 (1) 𝐷𝑟 = 𝜇(𝑊𝑇𝑂 − 𝐿) (4) ∑ 𝐹 = 𝛼𝑇 − 𝐷𝑝 − 𝐷𝑖 − 𝐷𝑟 − 𝑊𝑇𝑂 𝑠𝑖𝑛(𝜃) (5) 𝑎= (2) (3) ∑𝐹 𝑚𝑎𝑠𝑠 (6) Table 1: Input Take-Off Constants Total Skin Surface (𝑆) Total Wing Area (𝑆𝑤𝑖𝑛𝑔 ) Coefficient of Lift (𝐶𝐿 ) Aspect Ratio (𝐴𝑅) Coefficient of Skin Friction (𝐶𝑓 ) Runway Slope (𝜃) Span Efficiency (𝑒) Rolling Friction Coefficient (𝜇) Take-off Weight (𝑊𝑇𝑂 ) 664 ft2 170 ft2 0.2255 7.24 0.0095 0º (Runway 6) 0.6 0.02 2445 lb Lift was also calculated using the iteration method where velocity was incremented each time step. The velocity used in the lift equation (7) was taken from the 7 existing while loop velocity, where it was slightly less than the maximum take-off velocity (referenced from the Operating Handbook). 𝐿 = 1 2 𝜌𝑉 𝑆𝐶𝐿 2 (7) In order to use this program, experimental data was collected and compared to the theoretical results as referenced later in this section. Procedure: Prior to the test, crew responsibilities were determined for each crew member. Responsibilities included videotaping the wing as well as the control panel in order to record IAS and RPM as time values were called out. The pilot positioned the airplane at the beginning of Runway 6, where the tip of the wing lined up with the first runway light. The pilot counted down and the timer began. Then, as the airplane progressed down the runway, a crew member would call “Mark” every time leading edge of the wing intersected with a runway light. Each light was 150 feet apart from each other. Post processing was done through analyzing the video recording. 8 Data: Table 2: Take-Off Test Experimental Data Time (s) IAS (knots) RPM Runway Distance (ft) 0 0 2300 0 8.35 25 2400 150 11.96 45 2400 300 14.90 50 2450 450 17.18 57 2450 600 19.34 63 2450 750 21.46 70 2500 900 The data in Table 2 shows the time, indicated airspeed, RPM, and distance traveled throughout the takeoff sequence. It took over 21 seconds to takeoff. The takeoff indicated air speed was observed at 70 knots. Additional data calculated during the experiment is shown in Table 3 below. Table 3: Airport and Aircraft Conditions during Take-off Outside Air 66º F Pressure Altitude 1230 ft Takeoff Weight 2445 ft Density .0022419 slug/ft3 In order to calculate the velocity and distance, thrust required needed to be determined. Using a program written in MATLAB, data from the Lycoming O-320-D3G Engine Performance chart in Figure 3 below was used. From this table, brake 9 horsepower (BHP) was determined for a given pressure altitude and revolutions per minute (RPM). Using 2500 RPM for the take-off power input and a pressure altitude of approximately 1200 feet, the BHP was found to be 160 HP. Using the horsepower, velocity, and rpm, the thrust was calculated using a separate MATLAB code. Thrust will vary during the take-off due to the change in velocities. Figure 3: Lycoming O-320-D3G Engine Performance Data The acceleration can be calculated by determining the thrust and summing the forces acting on the aircraft during take-off. Through the iteration method, the velocity was updated until it reached the known takeoff velocity associated with the Warrior III. This value was found to be 55 knots from the Pilot’s Operating Handbook. The MATLAB code predicted that for these conditions, the take-off distance, BHP, and thrust was 740 feet, 172 HP, and 676 pounds respectively. 10 Figure 4: Velocity versus Distance for Take-Off Figure 4 shows the take-off velocity versus the take-off distance for the Warrior III. The computer calculated values are shown as a blue line while the experimental data collected during take-off are shown as orange stars. As Warrior III progressed down the runway, the experimental data became closer to the theoretical trend. However, the experimental data shows that the airplane took off at a lower speed than predicted. The speed from the Pilots Operating handbook is noted to be 55 knots, or approximately 92 feet per second. The experimental data shows that the take off speed was approximately 120 feet per second. 11 Analysis: The MATLAB code and experimental data has similarities and differences. While the plot in Figure 4 shows the relationship between velocity and distance, it also shows that the theoretical data predicted a much shorter take-off time than what was actually performed. This experiment could be improved by using GPS to record the distance and velocity over time during take-off. This would give accurate data for all points over the distance of the runway and not just at each runway light. PITOT STATIC CALIBRATION Theory: Pitot static calibration is used to determine the true airspeed given the GPS track and ground speed. Indicated airspeed is measured by the difference in the pressure between its total pressure sensor and the static pressure ports to calculate the dynamic pressure. The following mathematical definition for dynamic pressure, q, is used to relate true airspeed and indicated airspeed: 1 2 1 2 𝑞 = 𝜌𝑉𝑇𝐴𝑆 = 𝜌𝑜 𝑉𝐶𝐴𝑆 2 2 = (8) 1 𝜌 (𝑉 + 𝑒𝑟𝑟𝑜𝑟)2 2 𝑜 𝐼𝐴𝑆 where 𝜌 is density, 𝜌𝑜 is standard density of air, 𝑉𝑇𝐴𝑆 is true airspeed, 𝑉𝐶𝐴𝑆 is calibrated airspeed, and 𝑉𝐼𝐴𝑆 is indicated airspeed. Calibrated airspeed is given by adding a correctional error to the indicated airspeed found during the pitot static calibration. This error could be due to 12 the location of the pitot static probes, the orientation of the pitot static probes, the cross winds that act on the pressure sensors, or the various angles of attack disturbing the airflow. 𝑉𝑇𝐴𝑆 𝜌𝑜 = 𝑉𝐶𝐴𝑆 √( ) 𝜌 (9) The true airspeed and calibrated airspeed are related by the square root of the ratio of standard density to the density at the given pressure altitude and outside air temperature. The least squares method algorithm is used to find the best fit circle for the true airspeed given the track and ground speed. Procedure: The four-leg box method is used to find the true airspeed. The aircraft is flown in a box pattern at four orthogonal headings, preferably in the four cardinal directions. After leveling to the same indicated airspeed at each of the headings, which in this experiment was 65 knots, the track and ground speed given by the GPS are recorded. Using polar coordinates to visually represent and relate the indicated airspeed with the heading, the four polar vectors can be used as points for a circle with a radius of the indicated airspeed. Using the same polar representation for the ground speed with the track, the circle of best fit can be used as an accurate estimate for the true airspeed. The circles of best fit for both sets of polar coordinates are compared to assess the winds aloft during the calibration. Data: The pitot static calibration MATLAB script was used to calculate true airspeed with a given indicated airspeed of 65 knots at the following conditions: 13 Table 4: Conditions during Pitot Static Calibration Fuel Onboard (lbs): 210 Pressure Altitude (set to 29.92): 2320 Outside Air Temp: 52 (deg F) The MATLAB script calculates the density at the given pressure altitude and outside air temperature to insert into Eq 8 and 9. The MATLAB script imports the following tracks and ground speeds that were recorded from the onboard GPS at each of the headings: Table 5: GPS Track and Ground Speed at each cardinal direction for IAS of 65 knots Heading Track Ground Speed 360 333 68.7 90 80 57.9 180 169 88.7 270 248 78.6 Figure 5 below presents the track and ground speeds recorded during the experiment, indicated airspeed at each heading, and the circle of best fit for the GPS values with a radius of the estimated true airspeed. 14 Figure 5: Processed experimental data for Track and Ground Speed at 65 knots Analysis: At an indicated airspeed of 65 knots, the true airspeed was calculated to be 72.96 knots and the calibrated airspeed was 70.51 knots. The error between the calibrated airspeed given by equation 9 and the indicated airspeed of 65 knots was calculated by the pitot static MATLAB script to be 5.51 knots. The pitot static calibration was considered successful because the results from Figure 5 were expected. Figure 6, from the pilot operating handbook, shows that at given indicated airspeed of 65 knots, the Warrior III with flaps up has a calibrated airspeed of approximately 70 knots which is very accurate compared to the calculated calibrated airspeed of 70.51 knots. 15 Figure 6: Warrior III POH Airspeed System Calibration In the figure 5 above, each of the four experimental data points were shifted at approximately the same winds aloft vector from the corresponding points on the indicated airspeed plot. This follows the same behavior that was predicted for this test. The prediction was that the circle of best fit for the indicated airspeed would translate at the approximately the same wind aloft vector at each heading. 16 LEVEL FLIGHT POWER REQUIRED TEST Theory: This final test was used to determine the power required for a steady level flight as well as flat plate area and efficiency calculations. During flight, the total drag increases as the velocity increases, while the induced drag decreases. Reference Figure X for the relationship between the drag components and airspeed. The trend displayed in the graph is a result from the need to maintain lift. As the airplane flies at lower speeds, higher angle of attack is required. As the airplane increases speed, the parasite drag will increase because the air around it is hitting the structure with a greater force, and therefore moving across the surface with increased velocities. In response, this creates more drag. However, to keep the airplane in motion with this presence of drag, power is required to provide ongoing energy. This is the power required to maintain trimmed, level flight. The velocity where drag is a minimum is also the same velocity where there is the most excess power. Since power is equal to the product of thrust and velocity….. 17 Figure 7. Components of Drag vs Airspeed In this portion of the mission, IAS, OAT, PA, RPM, Deck Angle, and time increments of 30 seconds were recorded. This raw data was used to calculate the Power Required (Pr), flat plate area (f), and efficient (e) with the following equations. In the case that level flight was not maintained, the loss in altitude was accounted for using the equation below. 𝛥ℎ = 𝛥𝑃𝐴 ∗ (𝑂𝐴𝑇/𝑇𝑠) (10) Where Ts is the standard temperature at that altitude (taking account of the lapse rate). The equivalent velocity can be represented in Eq. X, where WTO is the maximum takeoff weight of 2440 lbs, and Wtot is the total weight at that time (including any changes in fuel weight), TAS 𝜌 is true airspeed, and 𝜎is the density ratio, 𝜌0. 𝑊𝑠 𝑉𝑒𝑤 = √𝜎√𝑊𝑡𝑜𝑡 ∗ 𝑇𝐴𝑆 (11) 18 Additionally, the equivalent power is shown in Eq. X which was derived using the linear relationship that power (P) is the product of thrust and velocity, and also the assumption that CL is held constant. Specifically, power in this relationship is equal to Thrust*Velocity*1.15. 𝑊𝑠 𝑃𝑒𝑤 = 𝑃√𝜎(𝑊𝑡𝑜𝑡)3/2 (12) By combining Eq.’s X and X, the flat plate area (f) and efficiency (e) can be calculated using the properties of a linear equation. 𝑃𝑒𝑤 𝑉𝑒𝑤 = 𝜌 𝑓 4 ( 20 ) 𝑉𝑒𝑤 𝑊 2( 𝑇𝑂 ) +( 𝑏 𝜋𝜌𝜀 2 ) (13) The independent variable is Vew^4, the slope is (p0f/2), and the y-intercept is the second term in the equation. By graphing PewVew by Vew^4 and using linear regression, an equation can be computed and (f) and (e) can be solved. Procedure: To calculate the power required to maintain level, trimmed flight in the Warrior III, a flight test is required. The pilot should reach a constant speed of 60 knots and a desired pressure altitude. For this test, we chose 2500 feet. Then begin a timer when the pilot is holding altitude. Beginning at 0 seconds and recording at 30 and 60 seconds, record the pressure altitude, RPM, outside air temperature, and deck angle. This should be repeated at 80 knots, 100 knots, and wide open throttle with the same desired pressure altitude. Repeating this experiment many times at different Pressure altitudes and aircraft weights will give a better representation of the data. Using the same computer function for the takeoff test, the brake horsepower can be calculated. For each flight and each speed, the power and velocity will be different. To find the common flat plate area and the span efficiency, the data points can be graphed to find a best fit linear equation. The slope of this line and the intercept could be compared to the expected values in equation 13 above. Algebra is then used to solve for the flat plate area and the span efficiency. 19 Data: The recorded data for our flight team is listed below in Table 6. Each of the 11 teams were flying at different conditions (weight, PA, or OAT). The different conditions that were recorded gave us more data to analyze and allowed for more accurate experimental data. Table 6: Recorded Data from Level Flight Power Required From the recorded data, we could calculate the equivalent power and velocity as shown in table 7 below. From there the flat plate area and span efficiency were found by using the slope and intercept from a linear fit line for Vew*Pew versus Vew^4. The flat plate area was calculated to be approximately 6.537 ft^2 and the span efficiency was calculated to be approximately 0.1953. These values were found using only our data range and will vary from the collective data from all the teams. Table 7: Calculated Data from Level Flight Power Required 20 Figure 8: Equivalent Power*Equivalent Velocity vs Equivalent Velocity ^4 Figure 8 above shows the collective data for the class. Each group calculated their equivalent power and velocity. From there, the data points were graphed. A linear best fit gave a slope of 0.007505 with an intercept at 7.523*e6. Using these values, we came up with a flat plate area of 6.333 ft^2 and an span efficiency coefficient of 0.1735. Analysis: The set of experimental data presented in Figure X shows a behavior that was expected for this test. As Vew^4 increases, the corresponding PewVew values also increase. This allowed Eq X to be used in calculating f and e with the use of the trendline. The value calculated for f was expected, but the value calculated for e was expected to be higher. This being said, the values for our group’s data compared to the collective class data are different but not by a large 21 amount. Our values were higher than the collective data. By looking at the collective data, the smaller values seemed to have large differences as some were far below the linear fit. This may suggest that this experimental method would work better for larger velocities. CONCLUSIONS Flight test 1 consisted of three different tests with the Warrior III: Takeoff test, Pitot-Static Calibration, and Level Flight Power Required test. The takeoff test was carried out with the consideration of the various forces acting on the Warrior III during take-off to determine the takeoff distance. The predicted takeoff distance and velocity were less than the values obtained during test. This could be due to the winds that were acting on the Warrior III during takeoff and unaccounted for during the summation of forces. During the pitot-static calibration, the track and ground speeds at the four corresponding headings were used to find the correction to the indicated airspeed. With this calibrated airspeed, the true airspeed was determined by comparing the dynamic pressure at the given pressure altitude to standard dynamic pressure. At a given indicated airspeed of 65 knots for each heading, the processed data for the calibrated airspeed was very precise when compared to the corresponding data found in the airspeed system calibration in the pilot operating handbook. The steady level flight test provided a means of calculating the flat plate area and the span efficiency of the Warrior III by assessing the power required to obtain a specific desired indicated airspeed. Although the value for f was close to what was expected, the value obtained for e was lower than what was predicted. Because the data from other lab groups were included in the process, their data may have been faulty and had an effect on the y-intercept that was used to calculate the span efficiency. 22 AERSP 420 APPENDIX Team 1 Data Card Flight 1 Date:___9/20/15___ Tail Number ___N264NO__________ Time:_9:06 am________ A/C Empty Weight __1527.1______________ Crew: Name Weight (lbs.) Pilot (Troy) 180 Amelia 120 Ryan 220 Cory 170 Total Crew Weight: 690 Takeoff: ❏ ❏ ❏ ❏ Record Conditions before takeoff One crew member video records at window and says “Mark” at each runway light Another crew member marks RPM and IAS Third crew member video records the airspeed indicator (AS) and tachometer (RPM) Fuel Onboard (gallons): 38gal Pressure Altitude (set to 29.92): 1075 ft Outside Air Temp: 66 deg F Wind Speed (knots) 360 @8 knots *Airport Elevation is actually 1231 ft. so flight altimeter was set to 30.06 *6 lbs/gal = 228lbs 23 Take off 1 Mark Location (ft) Time (s) IAS (knots) RPM 0 00:00 0 2300 150 8:60 30 2450 300 12:25 40 2500 450 14:98 47 2550 600 17:67 52 2550 Take off 2 Note: wind changed to 350 @9 knots Mark Location (ft) Time (s) IAS (knots) RPM 0 00:00 0 2300 150 08:35 35 2400 300 11:96 45 2400 450 14:90 50 2450 600 17:18 57 2450 750 19:34 63 2450 900 21:46 70 2500 1050 23:22 70 2500 Pitot-Static Calibration: Fuel Onboard (gal): 35 Pressure Altitude (set to 29.92): 2320 = 210lbs 24 Outside Air Temp: 52 (deg F) ❏ Start GPS Essentials App ❏ Point recording device at GPS ready to record ❏ Count out time intervals of 1 minute IAS HDG TRK (on-board GPS) GS (on-board GPS) TRK (GPS App) GS (GPS App) 62 360 333 68.7 -68.4 mph 68 90 80 57.9 -56.7 mph 67 180 169 88.7 60.7 mph 65 270 248 78.6 47 mph *Note: wind is 350 @ 9 Altitude: 2377 by the end *minimal change (so let’s disregard) Level Flight Power Required: Record data at each speed after ~1min of level flight. If large drop in altitude (e.g. 500ft), tell pilot to restart test at same speed. Fuel Onboard: 34 gal (burned 1 gal since last run) = 204 lbs Pressure Altitude (set to 29.92): 2290 IAS PA OAT Time (s) RPM Deck Angle 25 60 80 100 WOT 2500 2480 2450 2540 2540 2520 2500 2520 2520 2500 2480 2540 51 52 53 54 0 1900 9 30 1920 8 60 2020 10 0 2120 7 30 2150 5 60 2050 5 0 2325 3 30 2400 4 60 2500 3 0 2850 1 30 2825 1.5 60 2800 1.4 *note PA was taken with adjusted altimeter to 30.06 References: Piper Warrior III Pilot’s Operating Handbook AERSP 420 Common Aircraft Data http://sats.aeroengineer.net/data/warriorII.html http://www.beverlyflightcenter.com/pdfs/161IIISPEED.pdf 26