cufo
cufo-
Aggregate amortization general formula
Number of steps taken / size of input
-
Accounting amortization analogy
Simple operations are 'regular work days' and get an income of some constant amount. They pay their cost with this income and put the rest in 'savings'. Expensive operations are 'vacation days', and can use savings to pay their cost. As long as savings never goes below 0 (which you can prove by induction), we can prove a time complexity.
-
Optimization problem definition
Problems where there is a set of configurations and an objective function, and the goal is to find a configuration that maximizes (or minimizes) the value of the objective function. eg knapsack
-
Greedy algorithms: optimal substructure definition
A problem has it if an optimal solution can be constructed from optimal solutions of its subproblems.
-
Greedy algorithms: independent subproblems definition
Two subproblems that don't share resources, or the solution of one doesn't affect the solution of the other
-
Three conditions that allow greedy algorithms to be correct
Optimal substructure, independent subproblems, non-overlapping subproblems
-
Greedy algorithms: non-overlapping subproblems definition
Two subproblems are overlapping if they are really the same subproblem that occurs as a subproblem of different problems
-
Huffman coding: prefix code definition
No code word is a prefix of any other code word
-
Huffman coding steps
1) Build a frequency table
2) Sort characters from lowest to highest frequency
3) Pull the two lowest-valued nodes/trees from the list
4) Create a new tree with the lowest-valued node as its left subtree and the highest-value node as its right subtree
5) Put this subtree back into the list with its value being the aggregate value of all its trees/nodes
6) Sort the list again
7) Repeat until there is only 1 tree, which is the final answer
-
Divide and conquer: three general steps
1) DIVIDE the problem into subproblems
2) Recursively solve the subproblems (CONQUER)
3) Put the solutions together to create a solution to the big problem
-
What type of algorithmic design approach does merge sort take?
Divide and conquer
-
Three methods for finding the time complexity of recursive algorithms
Iterative substitution, recursion trees, master theorem
-
Dynamic programming general steps
Start with the base case, build up to more complex cases
-
What algorithm family does Huffman Coding belong to?
Greedy algorithms
-
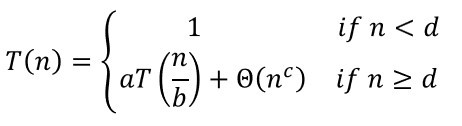
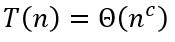
Master theorem: General formula for recurrence relations
-
Master theorem: what is T(n) when a > b^c?

-
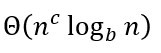
Master theorem: what is T(n) when a = b^c?
-
Master theorem: what is T(n) when a < b^c?
-
(a×b)modc = ________
(amodc×bmodc)modc
-
Modular arithmetic: additive inverse (y) formula
(x + y) mod n = 0
-
Modular arithmetic: multiplicative inverse (x^-1) formula
(x * x^-1)mod n = 1
-
Fermat's little theorem formula

-
What is a relative prime?
A number is relatively prime (or coprime) to another if their greatest common divisor is 1
-
What is ϕ(n)?
The number of non-negative integers less than n that are relatively prime to n
-
ϕ(pq) = ________, where p and q are two prime numbers
(p-1)(q-1)
-
Naive fibonacci recursion equation
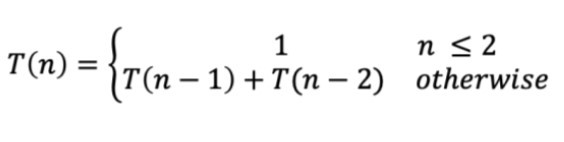
-
What is the complexity of naive fibonacci?
O(2^n)
-
digraph meaning and notation
directed graph. G = (V,E)
-
Transitive closure of a directed graph definition
A graph with the same nodes (vertices), but whenever there is an indirect path from u to v, it includes u,v as an edge
-
Floyd-Warshall general steps
1) Populate G* (the transitive closure graph) with the same nodes and vertices as G
2) Go through all the edges and whenever there is a pair (vi, vj) and (vj, vk), add (vi,vk).
3) Repeat until there are no more transitive edges
-
Acyclic graph definition
for any given vertex if you follow an edge that connects that vertex to another, there is no path in the graph to get back to that initial vertex
-
2 constraints for minimum spanning tree (apart from having the minimum cost/weight)
1) all vertices must be included 2)The mst must be acyclic
-
Cycle property of minimum spanning trees
Given a cycle, the MST for that cycle can be obtained by removing the highest-weighted edge
-
Is this graph (bold lines) a cycle?
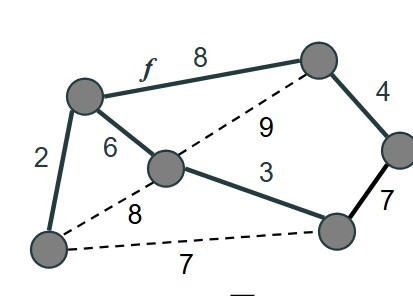
Yes
-
Partition (graph) property
• Consider a partition of the vertices of G intosubsets U and V• Let e be an edge of minimum weight across thepartition• There is a minimum spanning tree of G containingedge e
-
Kruskal general steps
• Sort the edges, lightest to heaviest• Divide all the vertices into clusters, one vertex per cluster• Start with the lightest edge, e• If e connects two clusters• Add e to the MST• Create a new cluster by merging those clusters• Else• Discard e• Keep going until there is only one cluster
-
Can a flow network have negative edge weights?
no
-
Two key vertices in a flow network
Source (s) and sink (t)
-
Flows and cuts: what is f(e)?
The amount of flow over edge e
-
Flows and cuts: what is E-(v)?
the set of incoming edges for vertex v
-
Flows and cuts: what is E+(v)?
the set of outgoing edges for vertex v
-
Flows and cuts: What is the capacity rule?
An edge always has at least 0 flow, and never has more flow than its capacity
-
Flows and cuts: What is the conservation rule?
The flow entering a vertex must equal the flow going out (except for s and t)
-
The flow of a graph is equal to ________
the sum of the outgoing flows from the source, or the incoming flows to the sink
-
Flows/cuts: Can one of the partitions of a cut contain both the source and the sink?
No
-
A forward edge of cut 𝜒 has its origin in ___ and destination in __, and vice versa for a backward edge
Vs, Vt
-
Does an edge need to be either forward or backward?
No
-
The flow across a cut is the sum of ________
the flows across the forward edges minus the sum of the flows across the backwards edges
-
The capacity of a cut is the sum of ______
the capacities of all the forward edges
-
True or false: the flow across a cut is the same as the flow across the network
true
-
Notes flows and cuts
no matter how one cuts the network, the value of the capacityat that cut is an upper bound for the flow of the network as a whole
-
Flows/cuts: Is the minimum cut (the cut with the least capacity) equal to the flow?
Yes
-
Flows/cuts: true or false: A path path π must follow the direction of the edges it traverses
true
-
Notes flows and cuts
If e is a forward edge, the residual capacity of e is the amount of capacity that fhas not consumed yet
-
Flows/cuts: augmenting path edge properties
1) f(e) < c(e) if e is a forward edge (non full and forward)2) f(e) > 0 if e is a backward edge (non empty and backward)
-
What is a matching in a bipartite graph?
a set of edges that have no endpoints in common
-
Notes: how the bipartite highest matching problem can be converted into a maximum flow problem
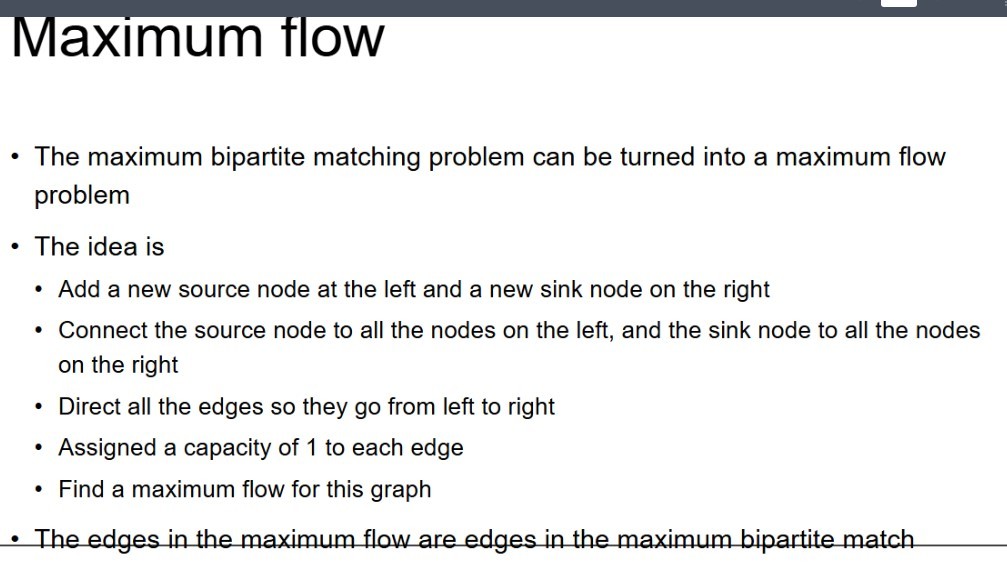
-
What is ϕ(n) when n is prime?
n-1
-
Master theorem: what is a?
a = number of pieces the problem gets divided in with each call. For mergesort A = 2
-
Master theorem: what is b?
b = denominator of fraction of input size that each piece takes (usually the same of a, but can be different). For mergesort b = 2
-
Master theorem: what is c?
theta (n^c) is how complex it is to put the pieces back together when you finish, so c=1 for merge sort
-
the additive inverse of a (mod n) is ______
n-a
-
the multiplicative inverse of a (mod n) is a number b such that ______
(a * b) mod n = 1
-
A decision problem is one where the answer is ____
yes or no
-
Every decision problem implicitly defines a ________
language
-
P is the class of problems that can be efficiently _________, while NP is the class of problems that can be efficiently _________
solved, checked
-
P vs NP: a verification algorithm B is an algorithm which takes as input a pair
of strings (x,y), where x is a problem instance and y is a ________
certificate
-
A verification algorithm B is sound if whenever 𝑥 ∉ 𝐿 (L = the set of problems for which a solution can be checked for correctness efficiently) ________________________________________
there is no certificate which will satisfy B, i.e. B will output 0 on input (x,y) for any y
-
A verification algorithm B is complete if whenever 𝑥 ∈ 𝐿 there is a certificate which will convince B, i.e. there exists ______________________________________________
some y (of size bounded by a polynomial q(n)) such that B will output 1 on input (x,y)
-
A language L is in NP if it has a verifier which is (1) _________,
(2) ______ and (3) _________
deterministic polynomial-time, sound, complete
-
Is problem reduction (P vs NP) symmetric?
No
-
A problem is NP-hard if _______________
every problem in NP can be reduced to it
-
A problem is NP-complete if _______________
it is NP-hard and an element of NP
-
In metric TSP, each node is _________
connected to every other node; there is an edge between every two nodes.
-
2-approximation for metric-TSP, three steps
1. Construct a minimal spanning tree M from G2. Construct an Euler-tree traversal E of M •E starts and ends at the same vertex and traverses each edge of M exactly once in each direction 3. Construct a tour T from E by marching through the edges of E, but each time we have (u, v) and (v, w) in E, such that v has already been visited, we replace those two edges with (u, w)
-
Why is it called 2-approximation?
Cost of the solution is at most twice of the optimal one
-
Edges are incident if ____________
there is a vertex between them
-
Vertices are adjacent if ___________
there is an edge between them
-
2-approximation vertex cover algorithm
1) Initialize the result as {}2) Consider the set of all edges in G. Let the set be E.3) Do following while E is not emptya) Pick an arbitrary edge (u, v) from set E and add 'u' and 'v' to resultb) Remove all edges from E which are either incident on u or v4) Return result
-
Vertex cover definition
Given a graph, find a minimal subset v of vertices such that every edge in the original graph is incident to some vertex in v
-
An edge is incident to a vertex if __________
it is an endpoint to that vertex.
-
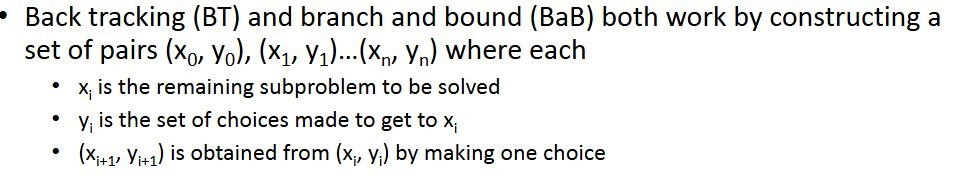
Backtracking / branch and bound notes
-
SAT stands for ________ decision problems
satisfiability (relating to logical formulas)
-
Branch and bound key principle: What is needed is some way to stop backtracking when _________
a candidate solution is worse than a solution one already has(There is no need to continue working on a candidate solution that is guaranteed to be worse than a solution you already have)
-
Branch and bound notes

-
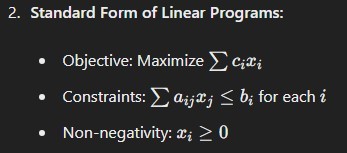
Standard form for linear programs: notes
-
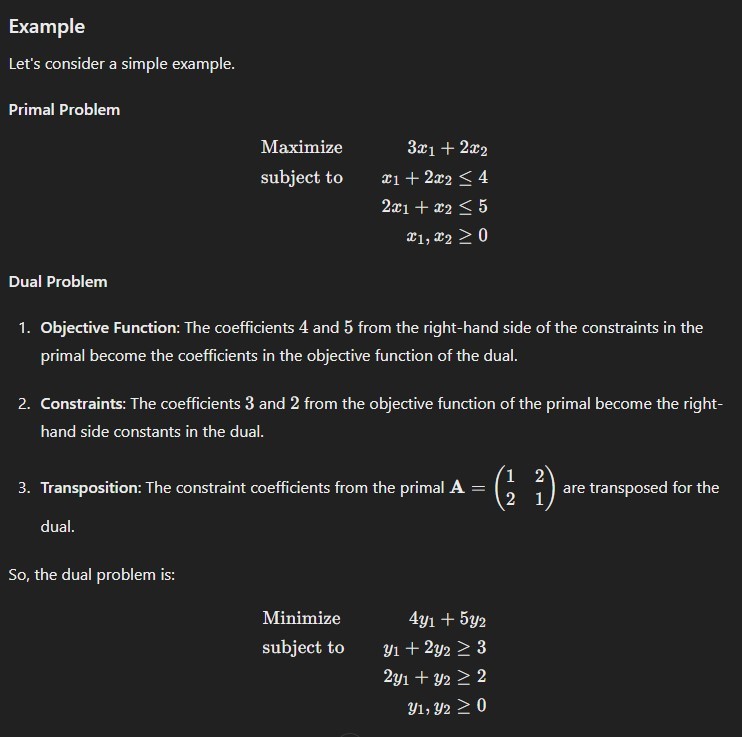
Notes on deriving the dual lp from the primal
-
Fisher yates (random permutation generation algorithm) steps
• Informally:• Given an array arr of length n• Start at the last element in the array (arr[n-1])• Roll a random number r in [0, ..., n-1]• Swap the last element with the element in arr[r]• Do this for the next-to-last element and a random number in [0, ..., n-2]• Keep doing this for all elements except arr[0]• You can do arr[0], too, it won’t hurt anything• All the elements are now in random spots
-
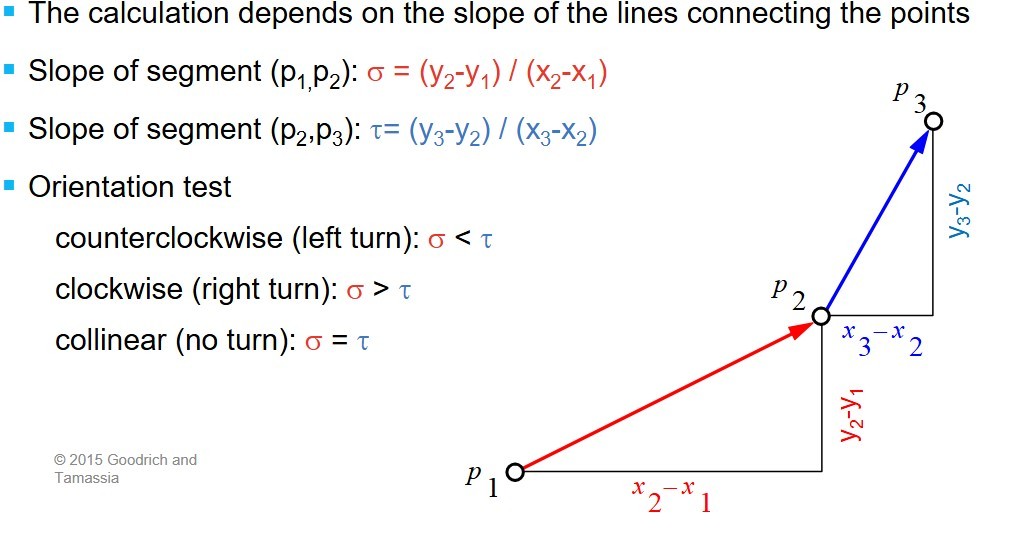
(convex hulls) How to calculate the orientation of nodes