10_DCM_for_fMRI
advertisement

Dynamic Causal Modelling for fMRI
Rosalyn Moran
Virginia Tech Carilion Research Institute
Department of Electrical & Computer Engineering, Virginia Tech
ION Short Course, 15th – 17th May 2014
Dynamic Causal Modelling
DCM framework was introduced in 2003 for fMRI by Karl Friston, Lee Harrison
and Will Penny (NeuroImage 19:1273-1302)
part of the SPM software package
>300 papers published
2
Overview
Dynamic causal models (DCMs)
Basic idea
Neural level
Hemodynamic level
Parameter estimation, priors & inference
Applications of DCM to fMRI data
Attention to motion in the visual system
Modelling synesthesia
The Status Quo Bias
3
Overview
Dynamic causal models (DCMs)
Basic idea
Neural level
Hemodynamic level
Parameter estimation, priors & inference
Applications of DCM to fMRI data
Attention to motion in the visual system
Modelling synesthesia
The Status Quo Bias
4
Principles of organisation: complementary approaches
Functional Specialisation
Functional Integration
5
Structural, functional & effective connectivity
Sporns 2007, Scholarpedia
anatomical/structural connectivity
presence of axonal connections
functional connectivity
statistical dependencies between regional time series
effective connectivity
causal (directed) influences between neurons or
neuronal populations
Mechanism - free
Mechanistic
6
Functional vs Effective Connectivity
Functional connectivity is defined in terms of statistical dependencies: an operational concept
that underlies the detection of a functional connection, without any commitment to how that
connection was caused
- Assessing mutual information & testing for significant departures from zero
- Simple assessment: patterns of correlations
- Undirected or Directed Functional Connectivity eg. Granger Connectivity
Effective connectivity is defined at the level of hidden neuronal states generating
measurements. Effective connectivity is always directed and rests on an explicit
(parameterised) model of causal influences — usually expressed in terms of difference
(discrete time) or differential (continuous time) equations.
- DCM
- SEM
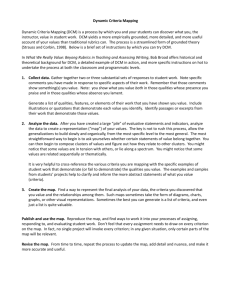
Dynamic Causal Modelling (DCM)
Hemodynamic
forward model:
neural activityBOLD
Electromagnetic
forward model:
neural activityEEG
MEG
LFP
Neural state equation:
fMRI
simple neuronal model
complicated forward model
dx
F ( x , u, )
dt
EEG/MEG
complicated neuronal model
simple forward model
Dynamic Causal Modelling
DCM is not intended for ‘modelling’
Time Series
DCM is an analysis framework for empirical data
DCM does not describe a time series
DCM uses a times series to test mechanistic hypotheses
Hypotheses are constrained by the underlying dynamic
generative (biological) model
Friston et al 2003; Stephan et al 2008
dx
dt
Kiebel et al, 2006; Garrido et al, 2007
David et al, 2006; Moran et al, 2007
9
Deterministic DCM for fMRI
x = (A + uB)x + Cu
y
y
H{2}
y = g(x, H ) + e
e ~ N(0, s )
x2
H{1}
A(2,2)
A(2,1)
C(1)
u1
A(1,2)
x1
B(1,2)
A(1,1)
u2
Overview
Dynamic causal models (DCMs)
Basic idea
Neural level
Hemodynamic level
Parameter estimation, priors & inference
Applications of DCM to fMRI data
Attention to motion in the visual system
Modelling synesthesia
The Status Quo Bias
11
Neuronal model
Aim: model temporal evolution of a set of neuronal states xt
System states xt
State changes are dependent on:
– the current state x
x1
x2
x3
Inputs ut
Connectivity parameters θ
– external inputs u
– its connectivity θ
dx
F ( x, u , )
dt
12
Example: a linear model of interacting visual regions
Visual input in the visual field
- left (LVF)
- right (RVF)
LG = lingual gyrus
FG = fusiform gyrus
x3 = a31x1 + a33 x3 + a34 x4
x3 left
FG
FG
x
right 4
LG
left
LG
x
right 2
x1
RVF u2
x1 = a11x1 + a12 x2 + a13 x3 + c12u2
x4 = a42 x2 + a43 x3 + a44 x4
LVF u1
x2 = a21x1 + a22 x2 + a24 x4 + c21u1
13
Example: a linear model of interacting visual regions
x3
x1
RVF u2
FG
left
LG
left
Visual input in the visual field
- left (LVF)
- right (RVF)
FG
x
right 4
LG
x
right 2
LG = lingual gyrus
FG = fusiform gyrus
LVF u1
x1 = a11x1 + a12 x2 + a13 x3 + c12u2
x2 = a21x1 + a22 x2 + a24 x4 + c21u1
x3 = a31 x1 + a33 x3 + a34 x4
x4 = a42 x2 + a43 x3 + a44 x4
14
Example: a linear model of interacting visual regions
x3
x1
RVF u2
FG
left
LG
left
Visual input in the visual field
- left (LVF)
- right (RVF)
FG
x
right 4
LG
x
right 2
LG = lingual gyrus
FG = fusiform gyrus
LVF u1
state
changes
x = Ax +Cu
{ A, C}
é
ê
ê
ê
ê
ê
êë
x1 ùú éê
x2 ú ê
ú=ê
x3 ú ê
ú ê
x4 úû êë
system
state
effective
connectivity
a11 a12 a13
a21 a22
0
a31
0
a33
0
a42 a43
0 ù
ú
a24 ú
ú
a34 ú
ú
a44 úû
é
ê
ê
ê
ê
ê
êë
input
parameters
x1 ùú é 0
ê
x2 ú ê c21
ú+ê
x3 ú ê 0
ú ê 0
x4 úû ë
c12
0
0
0
external
inputs
ù
úé
ù
úê u1 ú
úê
ú
úë u2 û
ú
û
15
Example: a linear model of interacting visual regions
FG
x
right 4
FG
x3 left
m
x = (A+ åu j B )x + Cu
( j)
j=1
LG
x
right 2
LG
left
x1
RVF u2
LVF u1
ATTENTION
é
ê
ê
ê
ê
ê
êë
x1
x2
x3
x4
ù ìé
ú ïê
ú ïïê
ú = íê
ú ïê
ú ïê
úû ïîêë
u3
a11 a12 a13
0
a21 a22
0 a24
a31
a33 a34
0
0 a42 a43 a44
ù é
ú ê
ú ê
ú + u3 ê
ú ê
ú ê
úû ë
(3)
12
0 b
0
0
0
0
0
0
0
0
0
0
ùü
0 úï
ïï
ú
0 ý
(3) ú
b34 ú ï
ï
0 úû ïþ
é
ê
ê
ê
ê
ê
êë
x1 ù é 0
ú ê
x2 ú ê c21
ú+ê
x3 ú ê 0
ú ê 0
x4 úû ë
c12
0
0
0
0
0
0
0
ù
úé u1 ù
ú
úê
úê u2 ú
úê u ú
úêë 3 úû
û
16
Deterministic Bilinear DCM
Simply a two-dimensional
taylor expansion (around x0=0, u0=0):
driving
input
dx
f
f
2 f
f ( x, u) f ( x0 ,0) x u
ux ...
dt
x
u
xu
modulation
¶f
A=
¶x u=0
¶f
C=
¶u x=0
¶2 f
B=
¶x¶u
Bilinear state equation:
m
dx
A ui B ( i ) x Cu
dt
i 1
DCM parameters = rate constant
a11
x1
dx1
a11 x1
dt
x1 (t ) x1 (0) exp( a11t )
Decay function
1
A
0.8
0.6
0.4
0.2
0
0.10
0.5x1 (0)
B
If AB is 0.10 s-1 this means that,
per unit time, the increase in
activity in B corresponds to 10% of
the current activity in A
-0.1 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
ln 2 / s
18
Example: context-dependent enhancement
stimulus u1
context u2
x1
u1
u2
a21
x1
x2
x2
x Ax u2 B 2 x Cu
x1 a11 0 x1
0 0 x1 c11 0 u1
u2 2
x a
u
a
x
b
0
x
0
0
2
2 21 22 2
21
2
19
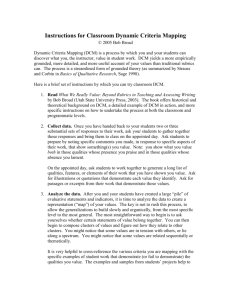
DCM for fMRI: the full picture
y
y
y
y
λ
activity
z2(t)
activity
z1(t)
BOLD
activity
z3(t)
hemodynamic
model
z
Neuronal states
integration
modulatory
input u2(t)
driving
input u1(t)
Neural state equation
t
endogenous
connectivity
modulation of
connectivity
t
Stephan & Friston (2007), Handbook of Brain Connectivity
direct inputs
20
Overview
Dynamic causal models (DCMs)
Basic idea
Neural level
Hemodynamic level
Parameter estimation, priors & inference
Applications of DCM to fMRI data
Attention to motion in the visual system
Modelling synesthesia
The Status-Quo Bias
21
DCM: Neuronal and hemodynamic level
Cognitive system is modelled at its underlying
neuronal level (not directly accessible for fMRI).
The modelled neuronal dynamics (x) are transformed
into area-specific BOLD signals (y) by a
hemodynamic model (λ).
Overcomes regional variability at the hemodynamic
level
x
λ
DCM not based on temporal precedence at
measurement level
y
22
DCM: Neuronal and hemodynamic level
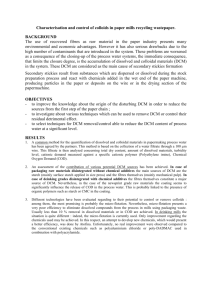
PLoSBIOLOGY
Identifying Neural Drivers with Functional
MRI: An Electrophysiological Validation
Olivier David
1,2*
, Isabelle Guillemain
1,2
, Sandrine Saillet
1,2
, Sebastien Reyt
1,2
, Colin Deransart
1,2
x
,
Christoph Segebarth 1,2, Antoine Depaulis1,2
1 INSERM, U836, Grenoble Institut des Neurosciences, Grenoble, France, 2 Université Joseph Fourier, Grenoble, France
Whether functional magnetic resonance imaging (fMRI) allows the identification of neural drivers remains an open
question of particular importance to refine physiological and neuropsychological models of the brain, and/or to
understand neurophysiopathology. Here, in a rat model of absence epilepsy showing spontaneous spike-and-wave
discharges originating from the first somatosensory cortex (S1BF), we performed simultaneous electroencephalographic (EEG) and fMRI measurements, and subsequent intracerebral EEG (iEEG) recordings in regions strongly
activated in fMRI (S1BF, thalamus, and striatum). fMRI connectivity was determined from fMRI time series directly and
from hidden state variables using a measure of Granger causality and Dynamic Causal Modelling that relates synaptic
activity to fMRI. fMRI connectivity was compared to directed functional coupling estimated from iEEG using asymmetry
in generalised synchronisation metrics. The neural driver of spike-and-wave discharges was estimated in S1BF from
iEEG, and from fMRI only when hemodynamic effects were explicitly removed. Functional connectivity analysis applied
directly on fMRI signals failed because hemodynamics varied between regions, rendering temporal precedence
irrelevant. This paper provides the first experimental substantiation of the theoretical possibility to improve
interregional coupling estimation from hidden neural states of fMRI. As such, it has important implications for future
studies on brain connectivity using functional neuroimaging.
“Connectivity analysis applied directly
on fMRI signals failed because
hemodynamics varied between regions,
rendering temporal precedence
irrelevant” ….The neural driver was
identified using DCM, where these
Citation: David O, Guillemain I, Saillet S, effects
Reyt S, Deransart are
C, et al. (2008)
Identifying neural drivers
with functional MRI: an electrophysiological validation. PLoS Biol 6(12):
accounted
for…
e315. doi:10.1371/journal.pbio.0060315
Introduction
Distinguishing effer ent fr om afferent connect ions i n
distributed networks is critical to construct formal theories
of brain function [1]. In cognitive neuroscience, the disti nct ion between forwar d and backward connections is
integrated neuroscience, these formal ideas have initiated a
search for neural networks using sophisticated signal analysis
techniques to estimate the connectivity between distant
regions [4,12–18]. At the brain level, connectivity analyses
were initiated in electrophysiology (electroencephalography
[EEG] and magnetoencephalography [MEG]) because electri-
λ
y
23
The hemodynamic “Balloon” model
3 hemodynamic
parameters
Region-specific
HRFs
Important for
model fitting, but
of no interest
24
Hemodynamic model
y represents the simulated
observation of the bold response,
including noise, i.e.
y = h(u,θ)+e
u1
u2
BOLD
z1
y1
(with noise added)
z2
y2
BOLD
(with noise added)
Z: neuronal activity
Y: BOLD response
25
How independent are neural and hemodynamic parameter estimates?
1
A
0.8
5
0.6
10
B
0.4
15
C
0.2
20
0
25
-0.2
h
ε
30
-0.4
35
-0.6
-0.8
40
5
10
15
20
Stephan et al. (2007) NeuroImage
25
30
35
40
-1
Overview
Dynamic causal models (DCMs)
Basic idea
Neural level
Hemodynamic level
Parameter estimation, priors & inference
Applications of DCM to fMRI data
Attention to motion in the visual system
Modelling synesthesia
The Status-Quo Bias
27
DCM is a Bayesian approach
new data prior knowledge
p | y p y | p
posterior
likelihood ∙ prior
parameter estimates
Bayes theorem allows one to formally
incorporate prior knowledge into
computing statistical probabilities.
The “posterior” probability of the
parameters given the data is an optimal
combination of prior knowledge and new
data, weighted by their relative precision.
Priors in DCM:
empirical, principled & shrinkage priors
28
Parameter estimation: Bayesian inversion
Estimate neural & hemodynamic
parameters such that the MODELLED
and MEASURED BOLD signals are
similar (model evidence is
optimised), using variational EM
under Laplace approximation
... What?
u1
u2
z1
y1
z
y2
2
29
VB in a nutshell (mean-field approximation)
Neg. free-energy
approx. to model
evidence.
Mean field approx.
Maximise neg. free
energy wrt. q =
minimise divergence,
by maximising
variational energies
ln p y | m F KL q , , p , | y
F ln p y, , q KL q , , p , | m
p , | y q , q q
q exp I exp ln p y, ,
q ( )
q exp I exp ln p y, ,
q ( )
Iterative updating of sufficient statistics of approx. posteriors by
gradient ascent.
30
Bayesian inversion
Specify generative forward model
(with prior distributions of parameters)
Regional responses
Variational Expectation-Maximization algorithm
Iterative procedure:
1. Compute model response using
current set of parameters
2. Compare model response with data
3. Improve parameters, if possible
ηθ|y
1. Gaussian posterior distributions of parameters
p ( | y , m)
2. Model evidence
p ( y | m)
Inference about DCM parameters: Bayesian single subject analysis
Gaussian assumptions about the posterior distributions of the parameters
posterior probability that a certain parameter (or contrast of parameters) is
above a chosen threshold γ:
By default, γ is chosen as zero – the prior ("does the effect exist?").
32
Inference about DCM parameters: Bayesian parameter averaging
FFX group analysis
Likelihood distributions from different subjects are independent
Under Gaussian assumptions, this is easy to compute
Simply ‘weigh’ each subject’s contribution by your certainty of the parameter
group
posterior covariance
1
| y1 ,..., y N
C
| y ,..., y
1
N
group
posterior mean
individual
posterior covariances
N
C|1yi
i 1
N 1
C | yi | yi C | y1 ,..., yN
i 1
individual posterior
covariances and means
33
Inference about DCM parameters: RFX analysis (frequentist)
Analogous to ‘random effects’ analyses in SPM, 2nd level analyses can be applied
to DCM parameters
Separate fitting of identical models
for each subject
Selection of parameters of interest
one-sample t-test:
parameter > 0 ?
paired t-test:
parameter 1 >
parameter 2 ?
rmANOVA:
e.g. in case of multiple
sessions per subject
34
Inference about models: Bayesian model comparison
Prior / instead of to inference on parameters
Which of various mechanisms / models best explains my data
Use model evidence
accounts for both accuracy and complexity of the model
allows for inference about structure (generalisability) of the model
Fixed Effects Model selection via
Random Effects Model selection
log Group Bayes factor:
via Model probability:
p (r | y, )
BF1, 2 ln p( y m1 ) ln p( y m2 )
k
k
rk
q
k ( 1 K )
35
Bayes factors
For a given dataset, to compare two models, we compare their
evidences.
Kass & Raftery 1995, J. Am. Stat. Assoc.
p( y | m1 )
B12
p( y | m2 )
Kass & Raftery classification:
or their log evidences
ln( B12 ) F1 F2
B12
p(m1|y)
Evidence
1 to 3
50-75%
weak
3 to 20
75-95%
positive
20 to 150
95-99%
strong
150
99%
Very strong
Ketamine modulates:
1. All extrinsic connections,
2. Intrinsic NMDA and
3. Inhibitory / Modulatory processes (one of the red arrows)
: use log bayes factors
Bayesian Model Comparison
u1
The model goodness: Negative Free Energy
F log p( y | m) KLq , p | y, m
u2
z1
y1
z2
y2
Accuracy - Complexity
KLq( ), p( | m)
1
1
1
T
ln C ln C | y | y C1 | y
2
2
2
The complexity term of F is higher
the more independent the prior parameters ( effective DFs)
the more dependent the posterior parameters
the more the posterior mean deviates from the prior mean
Overview
Dynamic causal models (DCMs)
Basic idea
Neural level
Hemodynamic level
Parameter estimation, priors & inference
Applications of DCM to fMRI data
Attention to motion in the visual system
Modelling synesthesia
The Status-Quo Bias
38
Example 1: Attention to motion
Friston et al. (2003) NeuroImage
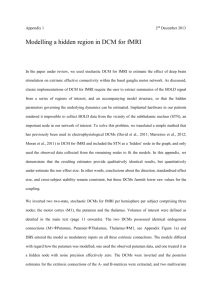
39
Bayesian model selection
m1
m2
Modulation
By attention
Modulation
By attention
PPC
External
stim
V1
m3
V5
m4
Modulation
By attention
PPC
stim
V1
V5
Modulation
By attention
PPC
stim
V1
V5
PPC
stim
V1
V5
attention
models marginal likelihood
ln p y m
0.10
PPC
1.25
stim
0.26
V1
0.39
0.26
0.13
V5
0.46
estimated
effective synaptic strengths
for best model (m4)
Stephan et al. 2008, NeuroImage
Parameter inference
attention
MAP = 1.25
0.10
0.8
0.7
PPC
0.6
0.26
1.25
0.26
stim
V1
0.5
0.39
0.13
V5
0.46
0.4
0.3
0.2
0.1
0.50
motion
Stephan et al. 2008, NeuroImage
0
-2
-1
0
1
2
3
4
p( DVPPC
5,V 1 0 | y ) 99.1%
5
Data fits
motion &
attention
static
motion &
no attention dots
V1
V5
PPC
observed
fitted
Example 2: Brain Connectivity in Synesthesia
Specific sensory stimuli lead to unusual, additional experiences
Grapheme-color synesthesia: color
Involuntary, automatic; stable over time, prevalence ~4%
Potential cause: aberrant cross-activation between brain areas
grapheme encoding area
color area V4
superior parietal lobule (SPL)
Hubbard, 2007
Can changes in effective connectivity explain synesthesia activity in V4?
43
Relative model evidence predicts sensory experience
Van Leeuwen, den Ouden, Hagoort (2011) JNeurosci
44
Example 3: The Status-Quo Bias
Difficulty
High
Low
Decision
Accept
Reject
Fleming et al PNAS 2010
45
Example 3: The Status-Quo Bias
Difficulty
High
Low
Decision
Accept
Reject
Main effect of difficulty
in medial frontal and right inferior frontal cortex
Fleming et al PNAS 2010
46
Example 3: The Status-Quo Bias
Difficulty
High
Low
Decision
Accept
Reject
Interaction of decision and difficulty
in region of subthalamic nucleus:
Greater activity in STN when default is rejected in difficult trials
Fleming et al PNAS 2010
47
Example 3: The Status-Quo Bias
DCM: “aim was to establish a possible mechanistic explanation for the interaction effect seen in the
STN.
Whether rejecting the default option is reflected in a modulation of connection strength from rIFC to
STN, from MFC to STN, or both “…
MFC
rIFC
STN
Fleming et al PNAS 2010
48
Example 3: The Status-Quo Bias
Difficulty
Difficulty
rIFC
Reject
Difficulty
MFC
MFC
rIFC
rIFC
Reject
Reject
STN
STN
STN
Difficulty
Difficulty
Difficulty
MFC
MFC
STN
Reject
rIFC
Reject
STN
Difficulty
Reject
STN
Difficulty
MFC
Reject
Reject
Difficulty
MFC
rIFC
Difficulty
MFC
rIFC
rIFC
STN
Difficulty
MFC
rIFC
Reject
STN
Reject
Difficulty
MFC
rIFC
Reject
STN
Reject
Example 3: The Status-Quo Bias
Difficulty
Difficulty
MFC
rIFC
Reject
Difficulty
MFC
Reject
STN
STN
Difficulty
Difficulty
Difficulty
MFC
MFC
STN
Reject
rIFC
Reject
STN
Difficulty
Reject
STN
Difficulty
MFC
Reject
Reject
Difficulty
MFC
rIFC
Difficulty
MFC
rIFC
rIFC
STN
rIFC
rIFC
Reject
STN
Difficulty
MFC
rIFC
Reject
STN
Reject
Difficulty
MFC
rIFC
Reject
STN
Reject
Example 3: The Status-Quo Bias
The summary statistic approach
Effects across subjects consistently greater than zero
P < 0.01 *
P < 0.001 **
Final note 1: The evolution of DCM in SPM
DCM is not one specific model, but a framework for Bayesian inversion of
dynamic system models
The default implementation in SPM is evolving over time
better numerical routines for inversion
change in priors to cover new variants (e.g., stochastic DCMs, endogenous
DCMs etc.)
To enable replication of your results, you should ideally state
which SPM version you are using when publishing papers.
52
Final note 2: GLM vs. DCM
DCM tries to model the same phenomena (i.e. local BOLD responses) as a GLM, just
in a different way (via connectivity and its modulation).
No activation detected by a GLM
→ no motivation to include this region in a deterministic DCM.
However, a stochastic DCM could be applied despite the absence of a local
activation.
attention
attention
PPC
PPC
stim
V1
Stephan (2004) J. Anat.
V5
stim
V1
V5
53
Other exciting developments
•
•
Nonlinear DCM for fMRI: Could connectivity changes be mediated by another
region? (Stephan et al. 2008)
Clustering DCM parameters: Classify patients, or even find new sub-categories
(Brodersen et al. 2011Neuroimage)
•
•
•
Embedding computational models in DCMs: DCM can be used to make inferences
on parametric designs like SPM (den Ouden et al. 2010, J Neurosci.)
Integrating tractography and DCM: Prior variance is a good way to embed other
forms of information, test validity (Stephan et al. 2009, NeuroImage)
Stochastic DCM: Model resting state studies / background fluctuations (Li et al. 2011
Neuroimage, Daunizeau et al. Physica D 2009)
54
DCM Roadmap
neuronal
dynamics
haemodynamics
state-space
model
posterior
parameters
priors
Bayesian Model
Inversion
fMRI data
model
comparison
55
Some useful references
• 10 Simple Rules for DCM (2010). Stephan et al. NeuroImage 52.
• The first DCM paper: Dynamic Causal Modelling (2003). Friston et al. NeuroImage 19:12731302.
• Physiological validation of DCM for fMRI: Identifying neural drivers with functional MRI: an
electrophysiological validation (2008). David et al. PLoS Biol. 6 2683–2697
• Hemodynamic model: Comparing hemodynamic models with DCM (2007). Stephan et al.
NeuroImage 38:387-401
• Nonlinear DCM:Nonlinear Dynamic Causal Models for FMRI (2008). Stephan et al.
NeuroImage 42:649-662
• Two-state DCM: Dynamic causal modelling for fMRI: A two-state model (2008). Marreiros et
al. NeuroImage 39:269-278
• Stochastic DCM: Generalised filtering and stochastic DCM for fMRI (2011). Li et al.
NeuroImage 58:442-457.
• Bayesian model comparison: Comparing families of dynamic causal models (2010). Penny et
al. PLoS Comput Biol. 6(3):e1000709.
56
Thank you
57
Use anatomical info and computational models to refine DCMs
9
Regions: location of nodes
Probabilistic cytoarchitectonic atlas (SPM)
Individual anatomical masks (FSL first)
Connections
Tract tracing studies in monkeys
Human DTI data to inform priors on connections (Stephan et al. 2009)
probabilistic
tractography
anatomical
connectivity
FG
left
34 6.5%
FG
right
24 43.6%
13 15.7%
LG
left
connection-specific priors
for coupling params
12 34.2%
LG
right
58
Use anatomical info and computational models to refine DCMs
9
Regions: locations of nodes
Probabilistic cytoarchitectonic atlas (SPM)
Individual anatomical masks (FSL first)
Connections
Tract tracing studies in monkeys
Human DTI data to inform priors on connections (Stephan et al. 2009)
Regions: modulation of other connections
(den Ouden et al. 2010)
Put
PMd
Computational models
Learning parametrically changes connections
PPA
FFA
59