inverse-kinematics
advertisement

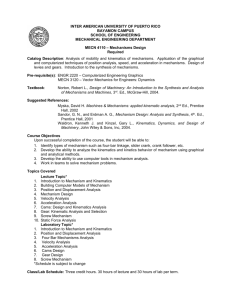
Inverse Kinematics
Inverse Kinematics (IK)
Given a kinematic chain (serial linkage),
the position/orientation of one
q4
end relative to the other
(closed chain), find the values
of the joint parameters
q2
q5
q3
q1
rigid groups
of atoms
T
Why is IK useful for proteins?
Filling gaps in structure determination by Xray crystallography
Structure Determination
X-Ray Crystallography
Automated Model Building
Software systems: RESOLVE, TEXTAL, ARP/wARP, MAID
• 1.0Å < d < 2.3Å ~ 90% completeness
• 2.3Å ≤ d < 3.0Å ~ 67% completeness (varies widely)1
1.0Å
3.0Å
JCSG: 43% of data sets 2.3Å
Manually completing a model:
• Labor intensive, time consuming
• Existing tools are highly interactive
Model completion is high-throughput bottleneck
1Badger
(2003) Acta Cryst. D59
The Completion Problem
Input:
Anchor 1
(3 atoms)
• Electron-density map
• Partial structure
• Two anchor residues
• Amino-acid sequence of
missing fragment
(typically 4 – 15 residues long)
Anchor 2
(3 atoms)
Protein fragment (fuzzy map)
Main part of protein (folded)
Output:
• Few candidate conformation(s) of fragment that
- Respect the closure constraint (IK)
- Maximize match with electron-density map
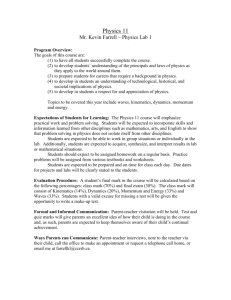
Example: TM0813
PDB: 1J5X, 342 res.
2.8Å resolution
12 residue gap
Best: 0.6Å aaRMSD
GLU-77
GLY-90
Example: TM0813
PDB: 1J5X, 342 res.
2.8Å resolution
12 residue gap
Best 0.6Å aaRMSD
GLU-77
GLY-90
Why is IK useful for proteins?
Filling gaps in structure determination by X-ray
crystallography
Studying the motion space of “loops” (secondary structure
elements connecting a helices and b strands), which often
play a key role in:
• enzyme catalysis,
• ligand binding (induced fit),
• protein – protein interactions
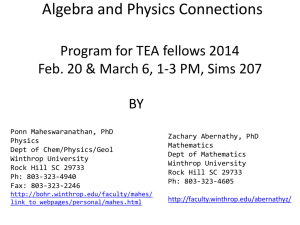
Loop motion in Amylosucrase
17-residue loop that plays
important role in protein’s
activity
Loop 7 of 1G5A
Conformations obtained by deformation sampling
1K96
Why is IK useful for proteins?
Filling gaps in structure determination by X-ray
crystallography
Studying the motion space of “loops” (secondary structure
elements connecting a helices and b strands), which often
play a key role in:
• enzyme catalysis,
• ligand binding (induced fit),
• protein – protein interactions
Sampling conformations using homology modeling
Chain tweaking for better prediction of folded state R.
[Singh and B. Berger. ChainTweak: Sampling from the Neighbourhood of a
Protein Conformation. Proc. Pacific Symposium on Biocomputing, 10:52-63,
2005.]
Generic Problem Definition
Inputs:
Protein structure with missing fragment(s)
(typically 4 – 15 residues long, each)
Amino-acid sequence of each missing fragment
Outputs:
Conformation of fragment or distribution of
conformations that
• Respect the closure constraint (IK)
• Avoid atomic clashes
• Satisfy other constraints, e.g., maximize match with
electron density map, minimize energy function, etc
IK Problem
Inputs:
Closed kinematic chain with n degrees of
freedom
Relative positions/orientations X of end
frames
Target function T(Q) → R
Outputs:
Conformation(s) that
• Achieve closure
• Optimize T
T
Relation to Robotics
Some Bibliographical References
Biology/Crystallography
Robotics/Computer Science
•
–
–
Manocha & Canny ’94
Manocha et al. ’95
–
Wang & Chen ’91
–
–
Khatib ’87
Burdick ’89
–
–
–
Han & Amato ’00
Yakey et al. ’01
Cortes et al. ’02, ’04
Optimization IK solvers
•
Redundant manipulators
Motion planning for closed loops
Exact IK solvers
–
–
Exact IK solvers
•
•
•
•
Optimization IK solvers
–
–
•
Fiser et al. ’00
Kolodny et al. ’03
Database search loop closure
–
–
•
Fine et al. ’86
Canutescu & Dunbrack Jr. ’03
Ab-initio loop closure
–
–
•
Wedemeyer & Scheraga ’99
Coutsias et al. ’04
Jones & Thirup ’86
Van Vlijman & Karplus ’97
Semi-automatic tools
–
–
Jones & Kjeldgaard ’97
Oldfield ’01
Forward Kinematics
q2
d2
d1
q1
(x,y)
x = d1 cos q1 + d2 cos(q1+q2)
y = d1 sin q1 + d2 sin(q1+q2)
Inverse Kinematics
q2
d2
d1
(x,y)
q2 = cos-1
q1
q1 =
x2 + y2 – d12 – d22
2d1d2
-x(d2sinq2) + y(d1 + d2cosq2)
y(d2sinq2) + x(d1 + d2cosq2)
Inverse Kinematics
d2
d1
(x,y)
q2 = cos-1
q1 =
Two solutions
x2 + y2 – d12 – d22
2d1d2
-x(d2sinq2) + y(d1 + d2cosq2)
y(d2sinq2) + x(d1 + d2cosq2)
More Complicated Example
q2
d2
(x,y)
d3
q3
d1
q1
Redundant linkage
Infinite number of solutions
Self-motion space
More Complicated Example
q2
d2
(x,y)
d3
q3
d1
q1
dq3
(q1,q2,q3)
dq2
dq1
1-D space
(self-motion
space)
More Complicated Example
q2
d2
(x,y,f)
d3
q3
d1
q1
dq3
(q1,q2,q3)
No redundancy
Finite number of solutions
dq2
dq1
General Results from Kinematics
Number of DOFs of a linkage (dimensionality of
velocity space):
NDOF = k(Nlink – 1) – (k–1)Njoint
where k = 3 if the linkage is planar and k = 6 if it
is in 3-D space (Grübler formula, 1883).
Examples:
- Open chain: Njoint = Nlink – 1 NDOF = Njoint
- Closed chain: Njoint = Nlink NDOF = Njoint – k
Nlink = 4
Njoint = 3
NDOF = 3(4-1)-(3-1)3 = 3
Nlink = 4
Njoint = 4
NDOF = 1
General Results from Kinematics
Number of DOFs of a linkage (dimension of
velocity space):
NDOF = k(Nlink – 1) – (k–1)Njoint
where k = 3 if the linkage is planar and k = 6 if it
is in 3-D space (Grübler formula, 1883).
Examples:
- Open chain: Njoint = Nlink – 1 NDOF = Njoint
- Closed chain: Njoint = Nlink NDOF = Njoint – k
Nlink = 4
Njoint = 3
NDOF = 3(4-1)-(3-1)3 = 3
Nlink =
Njoint =
NDOF =
General Results from Kinematics
Number of DOFs of a linkage (dimension of
velocity space):
NDOF = k(Nlink – 1) – (k–1)Njoint
where k = 3 if the linkage is planar and k = 6 if it
is in 3-D space (Grübler formula, 1883).
Examples:
- Open chain: Njoint = Nlink – 1 NDOF = Njoint
- Closed chain: Njoint = Nlink NDOF = Njoint – k
Nlink = 4
Njoint = 3
NDOF = 3(4-1)-(3-1)3 = 3
Nlink = 3
Njoint = 3
NDOF = 0
General Results from Kinematics
Number of DOFs of a linkage (dimension of
velocity space):
NDOF = k(Nlink – 1) – (k–1)Njoint
where k = 3 if the linkage is planar and k = 6 if it
is in 3-D space (Grübler formula, 1883).
Examples:
- Open chain: Njoint = Nlink – 1 NDOF = Njoint
- Closed chain: Njoint = Nlink NDOF = Njoint – k
5 amino-acids
10 f-y joints
10 links
NDOF = 4
General Results from Kinematics
6-joint chain in 3-D space:
NDOF=0
At most 16 distinct IK solutions
IK Methods
Analytical (exact) techniques
(only for 6 joints)
Write forward kinematics in the form of
polynomial equations (use t = tan(q/2)
Simplify, e.g., using the fact that two
consecutive torsional angles f and y have
intersecting axes
[Coutsias, Seck, Jacobson, Dill, 2004]
Solve
E.A. Coutsias, C. Seok, M.P. Jacobson, and K.A. Dill.
A Kinematic View of Loop Closure. J. Comp. Chemistry, 25:510-528, 2004
Decomposition Method for Randomly
Sampling Conformations of Closed Chains
Decompose closed chain into:
•
•
6 “passive” joints
n-6 “active” joints
Decomposition Method for Randomly
Sampling Conformations of Closed Chains
Decompose closed chain into:
•
•
6 “passive” joints
n-6 “active” joints
Sample the active joint parameters
Compute the passive joint parameters
using exact IK solver
J. Cortés, T. Siméon, M. Renaud-Siméon, and V. Tran. Geometric Algorithms
for the Conformational Analysis of Long Protein Loops. J. Comp. Chemistry,
25:956-967, 2004
Application of Decomposition
Method
Amylosucrase
IK Methods
Analytical (exact) techniques
(only for 6 joints)
Write forward kinematics in the form of
polynomial equations (use t = tan(q/2)
Simplify, e.g., using the fact that two
consecutive torsional angles f and y have
intersecting axes
[Coutsias, Seck, Jacobson, Dill, 2004]
Solve
Iterative (approximate) techniques
CCD (Cyclic Coordinate Descent)
Method
Generate random
conformation with
one end of chain at
required
position/orientation
Repeat until other
end is at required
position/orientation
or algorithm is stuck
at local minimum
– Pick one DOF
– Change to minimize
closure distance
L.T. Wang and C.C. Chen. A Combined Optimization Method for
Solving the Inverse Kinematics Problem of Mechanical Manipulators.
IEEE Tr. On Robotics and Automation, 7:489-498, 1991.
Application of CCD to Proteins
Closure Distance: S N N Ca Ca C C
2
moving end
2
2
A.A. Canutescu and R.L. Dunbrack Jr.
Cyclic coordinate descent: A robotics
algorithm for protein loop closure.
Prot. Sci. 12:963–972, 2003.
fixed end
S
0 and move
Compute qi s.t.
qi
Example: TM0813
PDB: 1J5X, 342 res.
2.8Å resolution
12 residue gap
Best: 0.6Å aaRMSD
GLU-77
GLY-90
Example: TM0813
PDB: 1J5X, 342 res.
2.8Å resolution
12 residue gap
Best: 0.6Å aaRMSD
GLU-77
GLY-90
Advantages of CCD
Simplicity
No singularity problem
Possibility to constrain each joint
independent of all others
But may get stuck at local minima!
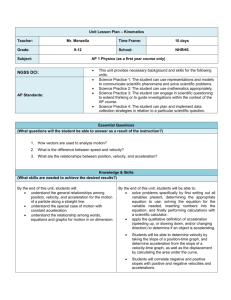
CCD with Ramachandran Maps
Ramachandran maps assign probabilities
to φ-ψ pairs ψ
φ
CCD with Ramachandran Maps
Ramachandran maps assign probabilities
to φ-ψ pairs
Change a pair (φi,ψi) at each iteration:
Compute change to φi
Compute change to ψi based on change to φi
Accept with probability min(1,Pnew/Pold)
IK Methods
Analytical (exact) techniques
(only for 6 joints)
Write forward kinematics in the form of
polynomial equations (use t = tan(q/2)
Simplify, e.g., using the fact that two
consecutive torsional angles f and y have
intersecting axes
[Coutsias, Seck, Jacobson, Dill, 2004]
Solve
Iterative (approximate) techniques
Jacobian Matrix
Q: n-vector of internal coordinates
X: 6-vector defining endpoint’s
position/orientation
n≥6
Forward kinematics: X = F(Q)
dxi = [∂fi(Q)/∂q1] dq1 +…+ [∂fi(Q)/∂qn] dqn
dX = J dQ
Efficient algorithm to compute Jacobian:
K.S. Chang and O. Khatib. Operational Space Dynamics: Efficient Algorithms
for Modeling and Control of Branching Mechanisms. IEEE Int. Conf. on Robotics
and Automation (ICRA),pp. 850-856, Sand Francisco, April 2000.
Jacobian Matrix J
∂f1(Q)/∂q1 ∂f1(Q)/∂q2
∂f2(Q)/∂q1 ∂f2(Q)/∂q2
…
…
∂f6(Q)/∂q1 ∂f6(Q)/∂q2
…
…
∂f1(Q)/∂qn
∂f2(Q)/∂qn
…
∂f6(Q)/∂qn
Case where n = 6
J is a square 6x6 matrix.
Problem: Given X, find Q such that X= F(Q)
Start at any X0 = F(Q0)
Method:
1. Interpolate linearly between X0 and X
sequence X1, X2, …, Xp = X
2. For i = 1,…,p do
a) Qi = Qi-1 + J-1(Qi-1)(Xi-Xi-1)
b) Reset Xi to F(Qi)
Case where n > 6
dX = J dQ
J is an 6n matrix. Assume rank(J) = 6.
Null space { dQ0 | J dQ0 = 0} has dim = n - 6
Case where n > 6
dX = J dQ
J is an 6n matrix. Assume rank(J) = 6
Find J+ (pseudo-inverse) such that JJ+ = I
dQ = J+dX
Null space { dQ0 | J dQ0 = 0} has dim = n - 6
dQ = J+dX + dQ0
arbitrarily chosen
in null space
Computation of
1.
+
J
SVD decomposition J = U S VT where:
- U in an 66 square orthonormal matrix
- V is an n6 square orthonormal matrix
- S is of the form diag[si]:
s1
s2
0
s6
2. J+ = V S+ UT where S+=diag[1/si]
Getting Null space
J
dX
U66
=
S66
VT6n
dQ
Getting Null space
J
dX
U66
VTnn
S6n
=
Gram-Schmidt orthogonalization
0
dQ
Getting Null space
J
dX
U66
=
VTnn
S6n
0
NT
(n-6) basis N of null space
dQ
Minimization of Target Function
T with Closure when n > 6
Input: Chain with both ends at goal positions
and orientations
Repeat
1.
2.
3.
4.
Compute Jacobian matrix J at current q
Compute null-space basis N using SVD of J
Compute gradient T(q)
Move along projection NNTy of y=-T(q) onto N
until minimum is reached or closure is broken
New q
I. Lotan, H. van den Bedem, A.M. Deacon and J.-C Latombe. Computing Protein
Structures from Electron Density Maps: The Missing Loop Problem.
Proc. 6th Workshop on Algorithmic Foundations of Robotics (WAFR `04)
Example: TM0813
PDB: 1J5X, 342 res.
2.8Å resolution
12 residue gap
Best: 0.6Å aaRMSD
GLU-77
GLY-90
Example: TM0813
PDB: 1J5X, 342 res.
2.8Å resolution
12 residue gap
Best: 0.6Å aaRMSD
GLU-77
GLY-90
Example: TM0813
PDB: 1J5X, 342 res.
2.8Å resolution
12 residue gap
Best 0.6Å aaRMSD
GLU-77
GLY-90
TM1621
Green: manually
completed
conformation
Cyan: conformation
computed by stage 1
Magenta: conformation
computed by stage 2
The aaRMSD improved
by 2.4Å to 0.31Å
Produced by H. van den Bedem
Multi-Modal Loop
A323
Hist
A316
Ser
Produced by H. van den Bedem