Sect. 3.11
advertisement

Sect. 3.11: Transformation to Lab Coords
• Scattering so far:
– Treated as 1 body problem! Assumed 1 particle scatters off
a stationary “Center of Force”.
– Central Force problem formulation We know this
means that we are doing problem in the Center of Mass
coordinate system for 2 bodies & that we are looking at the
behavior of the reduced mass μ.
– ACTUAL SCATTERING, is (of course) a 2 body problem!
2 masses m1 & m2 scattering off each other. In “lab
coordinate system” we need to account for both bodies.
Everything we’ve done so far is valid also in the lab frame
if m2 >> m1 = m = μ so that the recoil of m2 due to m1
scattering from it can be neglected. Effectively the same as
assuming infinitely massive m2. Now, transform back to the lab frame.
• Recall: 2 body problem in Center of Mass coordinates:
• Center of Mass Coordinate: (M (m1+m2))
R (m1r1 +m2r2)(M)
• Relative Coordinate:
r r1 - r2
• Define: Reduced Mass: μ (m1m2)(m1+m2)
A useful relation: μ-1 (m1)-1 +(m2)-1
• Algebra Inverse coordinate relations:
r1 = R + (μ/m1)r; r2 = R - (μ/m2)r
• Velocities related by: v1 = V + (μ/m1)v; v2 = V - (μ/m2)v
• To get from the 1 body CM frame scattering problem just
discussed to the 2 body lab frame problem, just replacing m
μ in what we’ve done so far is not sufficient! In particular:
• The scattering angle measured in the lab θ angle
between final & incident directions of the scattered
particle in the lab coordinate system.
• Scattering angle calculated in previous discussion:
Θ = π -2∫dr(s/r)[r2{1- V(r)/E} - s2]-½ Angle
between the initial & final directions of the relative
coordinate r between m1 & m2 in the CM coordinate
system. θ = Θ only if m2 is stationary (or infinitely
massive) throughout the scattering.
– NOTE: θ θ the angle describing the orbit r(θ)!
Kinematics of the Transformation
• Assume m2 is initially at rest in the lab frame.
– Clearly, after m1 scatters from it, in general it will not be at rest!
It will recoil due to the scattering!
– Freshman physics: Momentum IS ALWAYS conserved in a
collision!
Cannot get the lab scattering angle θ directly from
solving the 1 body CM frame problem for Θ.
– Need to take the result from the1 body CM frame scattering &
transform it back to the lab frame. See figure
• In the lab frame, the situation looks like:
m2 is initially at rest
• In the CM frame,
the situation looks like:
Looks like this
to an observer
moving with the
Center of Mass.
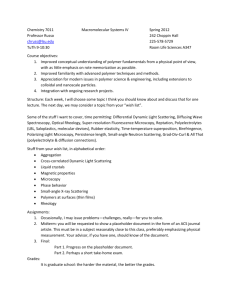
• In the lab frame:
m2 initially at rest. Connection
between θ & Θ obtained by
looking at detailed transform
between lab & CM coordinates
In the CM frame:
CM frame scattering angle Θ =
same as scattering angle of either
particle.
In the CM frame, the total
linear momentum of the 2
particles = 0. Before
scattering, the particles
move directly towards
each other. Afterwards,
they move off as shown.
• Terminology, notation, changed slightly:
• r1, v1 = position, velocity of the incident particle,
m1 AFTER scattering in the LAB system.
• (r1)´, (v1)´, = position, velocity of m1 AFTER
scattering in the CM system.
• R,V = position, velocity of the Center of Mass in
the LAB system. From early discussion: V = constant.
• By definition (any time) r1 = R + (r1)´ & v1 = V + (v1)´
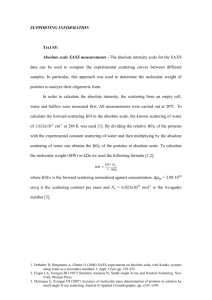
See figure (after scattering!):
r1 = R + (r1)´ & v1 = V + (v1)´ Figure (after scattering!):
v1 & (v1)´ make angles & Θ,
respectively with direction of V.
Initial velocity of m1 in lab system
= v0 . m2 is initially at rest in the
lab system v0 = initial relative
velocity (= initial v in the general formalism).
Linear momentum conservation: (m1+ m2)V = m1v0
V = (μ/m2)v0
(1)
From the figure: v1cos = (v1)´cosΘ + V
(2)
Also:
v1sin = (v1)´sinΘ
(3)
Divide (2) by (3) & use (1) (ρ (μv0)/[m2(v1)´]):
tan = (sinΘ)/(cosΘ + ρ)
Note: if m2 is infinite, ρ = 0 & = Θ
(4)
r1 = R + (r1)´ & v1 = V + (v1)´ Figure (after scattering!):
Alternative relation from the Law
of Cosines. From the figure:
(v1)2 = [(v1)´]2 + V2
+ 2(v1)´VcosΘ
Also: v1sin = (v1)´sinΘ & V = (μ/m2)v0
Combine & get (ρ (μv0)/[m2(v1)´]):
cos = (cosΘ + ρ)/[1+2ρcosΘ + ρ2]½
(4´)
• Relations between scattering angles in the lab & CM
frames: tan = (sinΘ)/(cosΘ + ρ)
(4)
cos = (cosΘ + ρ)/[1+2ρcosΘ + ρ2]½
• Consider ρ (μv0)/[m2(v1)´]:
(4´)
From the CM definition, (v1)´ = (μ/m1)v, v = |r| = relative
speed after collision: ρ = (m1/m2)(v0/v)
• Elastic (KE conserving) scattering: v0 = v, ρ = (m1/m2)
• Inelastic (KE non-conserving) scattering: (E = (½)μ(v0)2)
(½)μv2 - (½)μ(v0)2 Q “Q value” of collision.
Clearly, since KE is lost, Q < 0
Algebra gives (M = m1+m2): (v/v0) = [1 +(M/m2)(Q/E)]½
ρ = (m1/m2)[1 +(M/m2)(Q/E)]-½
(5)
Analyze scattering kinematics: Combine (5) & (4) or (4´)
Transforming
• To analyze scattering cross sections in the lab frame, its not
sufficient to do simple kinematics! Also need to transform the
cross section σ itself from a function of Θ to a function of .
σ(Θ) σ´()
• Connection: Obtained by conservation of particle number:
# particles scattered into a given differential solid angle d
must be the same, whether measured in the lab or CM frame.
So: 2πIσ(Θ)sinΘ|dΘ| = 2πIσ´()sin|d|
σ´() = σ(Θ)(sinΘ/sin)(|dΘ|/|d|)
Rewrite as: σ´() = σ(Θ)(|dcosΘ|/|dcos|)
Use kinematic result: cos = (cosΘ + ρ)/[1+2ρcosΘ + ρ2]½
Take derivative & get: (ρ = (m1/m2)[1 +(M/m2)(Q/E)] ]-½)
σ´() = σ(Θ)[1+2ρcosΘ + ρ2]½(cos Θ + ρ)-1
(6)
σ´() = σ(Θ)[1+2ρcosΘ + ρ2]½(cos Θ + ρ)-1
(6)
• Note: σ´() & σ(Θ) are both measured in the lab
frame! They’re expressed in terms of different coordinates.
• Special Case #1: Elastic scattering with m1 = m2:
ρ = 1 cos = [(½)(1+ cosΘ)]½ = cos(½Θ) = (½Θ)
– Since Θ π, in this case, cannot have > ½π
In the lab system, all scattering is in forward hemisphere.
– In this case, (6) becomes: σ´() = 4cosΘσ(Θ)
Even in the very special case where σ(Θ) = constant, σ´()
still depends on angle!
• Special Case #2: Elastic scattering with m1 << m2
(effectively, m2 is infinite) ρ 0 σ´() σ(Θ)
More Details
• Obviously, scattering slows down the incident particle!
• More kinematics:
We had
(v1)2 = [(v1)´]2 + V2 + 2(v1)´VcosΘ
Also, ρ = (μv0)/[m2(v1)´] and V = (μ/m2)v0
Combine these to get (algebra):
[(v1)2/(v0)2] = [μ2/(m2ρ)2][1+ 2ρcosΘ + ρ2]
(a)
• Special case: Elastic scattering ρ = (m1/m2)
– Let E0 (½)m1(v0)2 = initial KE of m1 before scattering
– Let E1 (½)m1(v1)2 = final KE of m1 after scattering
(a) (E1/E0) = [1+2 ρcosΘ + ρ2]/(1+ ρ)2
If m1 = m2 , (E1/E0) = (½)(1+ cosΘ) = cos2
(Typo in text, forgot the square!). For max Θ = π, = (½)π
(E1/E0) = 0. The incident particle stops in the lab system!!
Principle behind “moderator” in neutron scattering.
Classical Mech vs. QM
• Some final thoughts on classical scattering discussion.
• All we’ve used is simple conservation of momentum &
energy. The cross section results are classical.
• However, as long as we know the Q value & momentum is
conserved, it doesn’t really matter if it is QM or classical
scattering!
• Why? Because we’ve analyzed the outgoing particle beam
(mostly, except for Coulomb scattering) without caring what
the details of the scattering were! Details of the scattering, of
course, usually require QM analysis!
The results of MOST of Sects 3.10 & 3.11 can be
used in analyzing experiments for (almost) any kind
of (low energy) scattering! Exception: At high enough
energies, need to do all of this with Relativity! See Sect. 7.7!